Изобретение может относится к транспортному машиностроению, конкретно к конструкции ведущего колеса вездехода.
Известен колесный движитель, имеющий жестко закрепленные с цилиндрической опорной поверхностью и установленные наклонно к оси приводного вала колеса [1] При качении такое колесо на поверхности грунта оставляет синусоидальный след. В этом случае при взаимодействии колеса с грунтом появляются дополнительные (к силам трения) загребающие и выталкивающие силы, направленные назад и вверх по отношению к направлению движения. Этим достигается увеличение проходимости.
Практическое применение таких движителей ограничено, так как связано не только с технологическим трудностями выполнения колеса эллипсообразной формы с цилиндрическим ободом и соответствующей формы резины колеса, но и эксплуатационными: из-за жесткой связи колеса, с приводным валом которого при движении с высокими (или нормальными) скоростями по твердой поверхности присутствуют повышенные динамические нагрузки между колесом и грунтом (как и должно быть при качении эллипса), ведущие к активному износу резины колеса.
Прототипом является привод ведущего колеса, содержащий приводной вал, на котором установлена с возможностью вращения относительно приводного вала ступица колеса с диском и упругие элементы, связывающие вал с диском, а также жестко установлена втулка, образующая цилиндрической поверхности которой не параллельна оси вращения вала, а ось внутреннего отверстия ступицы, установленной на втулке, параллельна образующей цилиндрической поверхности втулки [2]
Привод обеспечивает достижение, состоящее в повышении тягово-сцепных свойств ведущего колеса при одновременной их автоматической регулировке.
Основными недостатками этого привода является уменьшение проходимости и потеря управляемости колесом, потому что такое колесо при качении "восьмерит" по грунту (велосипедный термин), увеличивая сопротивления качению колеса на грунте и ступице, имеющей ось вращения не параллельную оси вращения приводного вала, и при этом оно не имеет жесткой или фрикционной связи с валом вообще, а в плоскости управления, т.е. в горизонтальной плоскости особенно, это делает колесо и не управляемым.
Техническим результатом предлагаемого привода является автоматическое увеличение проходимости без потери управляемости и сохранении автоматической регулировки повышения тягово-сцепных свойств ведущего колеса.
Указанный результат достигается тем, что ступица на втулке установлена с возможностью провертывания между сопрягаемых плоскостей дискообразных ведущих элементов, направленными под углом к оси приводного вала, так, что ось внутреннего отверстия ступицы, установленной на втулке, перпендикулярна к этим плоскостям, связанными упругими элементами со ступицей, причем один из дискообразных ведущих элементов закреплен на приводном валу жестко, а другой
зацеплением вращения и подпирается другим упругим элементом с возможностью вдоль осевого перемещения и фиксации.
Причем образующая цилиндрической поверхности ступицы, установленной на втулке, не параллельна, а диск с колесом закреплен на ступице нормально к оси вращения приводного вала.
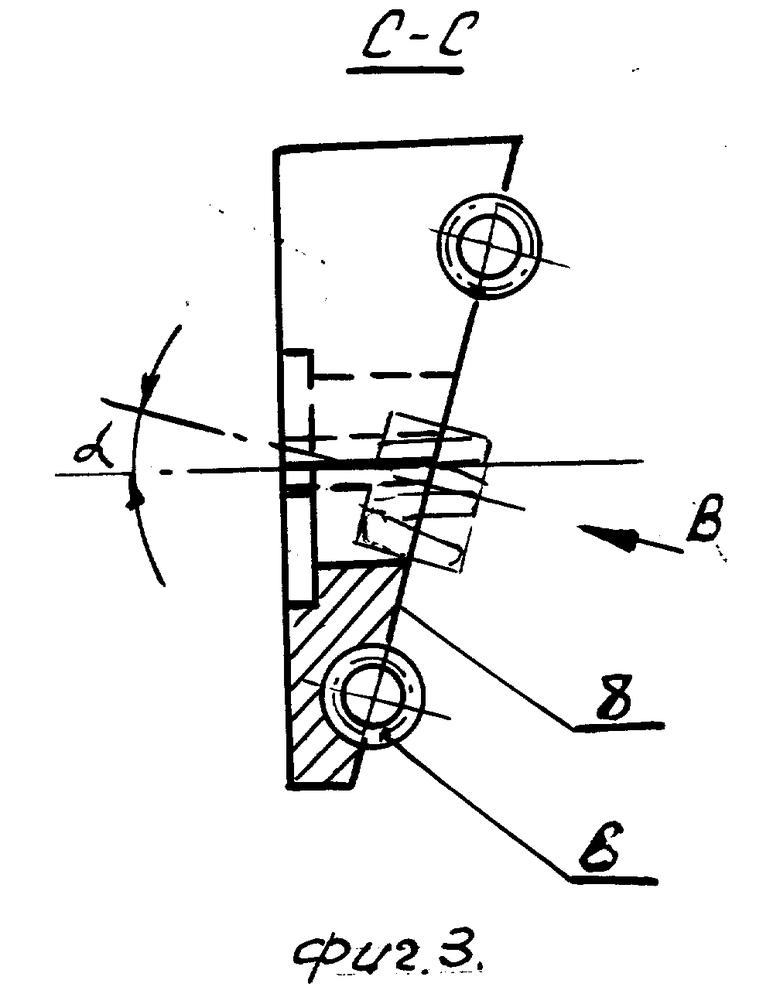
На фиг. 1 изображен схематический разрез привода; на фиг. 2 и 3 вид в плане и сбоку дискообразного ведущего элемента с упругими; на фиг. 4 и 5 - ступица (без диска) в плане и с боку.
Привод содержит колесо 1 с диском 2, приводной вал 3, ступицу 4, установленную с возможностью вращения относительно приводного вала 3, ось O1-O1 поворота которой на жестко закрепленной на валу 3 втулке 5 не параллельна оси O-O вала 3, и упругие элементы 6, связывающие диск колеса с валом. Ступица 4 размещена также с возможностью провертывания между дискообразных ведущих элементов 7 и 8, плоскости сопряжения которых со ступицей 4 направлены под углом к оси O-O вала так, что ось O1-O1 поворота ступицы 4 перпендикулярна к этим плоскостям, и которые связаны со ступицей 4 упругими элементами 6. Ведущий элемент 7 закреплен на валу 3 жестко, а 8 зацеплением вращения, например, по скользящей посадке на шпонке или шлицевым соединением и т.п. и подпирается другим упругим элементом 9 с возможностью вдоль осевого перемещения регулировочной гайкой 10 и фиксацией контргайкой 11.
При этом образующая цилиндрической поверхности ступицы 4, установленной на втулке 5, не параллельна, а диск 2 колеса 1 закреплен на ступице 4 нормально к оси O-O вращения приводного вала 3.
Работа привода осуществляется следующим образом.
Если усилия сопротивления качению колеса не вызывают реакции упругих элементов 6 и 9, то колесо катится как нормальное, известное. Когда указанные усилия бесконечно возрастают, то для их преодоления требуется повышение Mкр. на валу 3, а значит и на втулке 5 с дискообразными ведущими элементами 7 и 8, которые стремятся провернуться относительно заторможенного колеса в ступице 4, тогда фрикционная связь ослабляется и направление вектора нагрузки переводится плоскостями сопряжения дискообразных ведущих элементов 7 и 8 в плоскость, нормальную образующей втулки 5, т.е. на упругие элементы 6, при сжатии которых плоскость вращения колеса автоматически отклоняется от вертикали на некоторый угол α и тогда достижение технического результата происходит следующим образом.
Во-первых, качение колеса происходит по криволинейной синусоидальной формы траектории и к силам сцепления и трения между колесом и грунтом добавляется сила бокового сдвига призмы грунта. Так как в проекции на вертикальную плоскость наклоненное колесо дает эллипс, то в других точках траектории качения повышенное тяговое усилие реализуется за счет качения эллипса, связанного с изменением радиуса качения, т.е. расстояния от оси до грунта, обуславливая загребающий эффект, но только в вертикальной плоскости (этим достигается сохранение автоматической регулировки повышения тягово-сцепных свойств ведущего колеса). Во-вторых, автоматически отклоненная от вертикали на некоторый угол a плоскость вращения колеса вследствие наличия фрикционной связи (наряду с упругой с элементами 6) ступицы 4 с дискообразными ведущими элементами 7 и 8, последние автоматически осуществляют жесткую связь с валом 3 и в горизонтальной плоскости с такой же траекторией качения и поэтому (см. силу F на фиг.1) загребающими и выталкивающими, дополнительно к указанным выше, силами, направленными назад и вверх по отношению к направлению движения (автоматически увеличивая проходимость).
При выполнении образующей цилиндрической поверхности ступицы 4, установленной на втулке 5 непараллельной, а диска 2 колеса 1, закрепленного жестко на ступице 4 нормально к оси O-O вращения приводного вала 3, увеличивается угол a до угла 2α отклонения плоскости вращения колеса от вертикали, увеличивая амплитуду криволинейного движения, значит и загребающих и выталкивающих сил в горизонтальной плоскости, т.е. увеличивается проходимость. При устранении нагрузки на сжатые упругие элементы 6 колесо обратным их действием автоматически устанавливается нормально. Третья особенность состоит в том, что ведущее колесо, обладая вышеуказанными свойствами, достигаемыми за счет осуществления упругой, фрикционной и одновременно жесткой связи с валом как в вертикальной, так и в горизонтальной плоскостях, ничем не отличается в управлении от известного. Более того, указанные выше свойства колеса возможно использовать в потенциальном (тактическом) запасе, т.е. не пользоваться, если жестко закрепить (поджать) упругий элемент 9, то в этом случае свойства колеса ничем не отличаются от известного с нормальной геометрией качения.
Вездеход с приводом, каждое ведущее колесо которого автономно, оперативно и автоматически изменяет свои тягово-сцепные свойства и проходимость с нормальной управляемостью, по своему тактико-техническому уровню стоит выше известных аналогов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИЖИТЕЛЬ ОРЛОВА В.П. | 1998 |
|
RU2160188C2 |
| ДВИЖИТЕЛЬ ТРАНСПОРТНОГО СРЕДСТВА | 1987 |
|
RU2031039C1 |
| Движитель транспортного средства | 1990 |
|
SU1789404A1 |
| Колесо транспортного средства | 1981 |
|
SU992242A1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2280562C2 |
| САМОХОДНОЕ КРЕСЛО ДЛЯ ИНВАЛИДОВ | 1991 |
|
RU2033125C1 |
| СНЕГОБОЛОТОХОД | 2023 |
|
RU2801955C1 |
| УПРАВЛЯЕМАЯ ПОДВЕСКА ДВУХКОЛЕСНОГО БЛОКА | 2020 |
|
RU2740522C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| КОЛЕСНЫЙ БЛОК С УПРАВЛЯЕМОЙ ПОДВЕСКОЙ | 2020 |
|
RU2743346C1 |

Использование: в транспортном машиностроении, а именно в конструкции ведущего колеса вездехода. Сущность: привод содержит ступицу, установленную с возможностью вращения относительно вала, ось поворота которой на жестко закрепленной на валу втулке не параллельна оси вала. Ступица установлена также с возможностью провертывания между дискообразных ведущих элементов, плоскости сопряжения которых со ступицей направлены под углом к оси вала так, что ось поворота ступицы перпендикулярна к ним и которые связаны со ступицей упругими элементами. 1 з.п. ф-лы, 5 ил.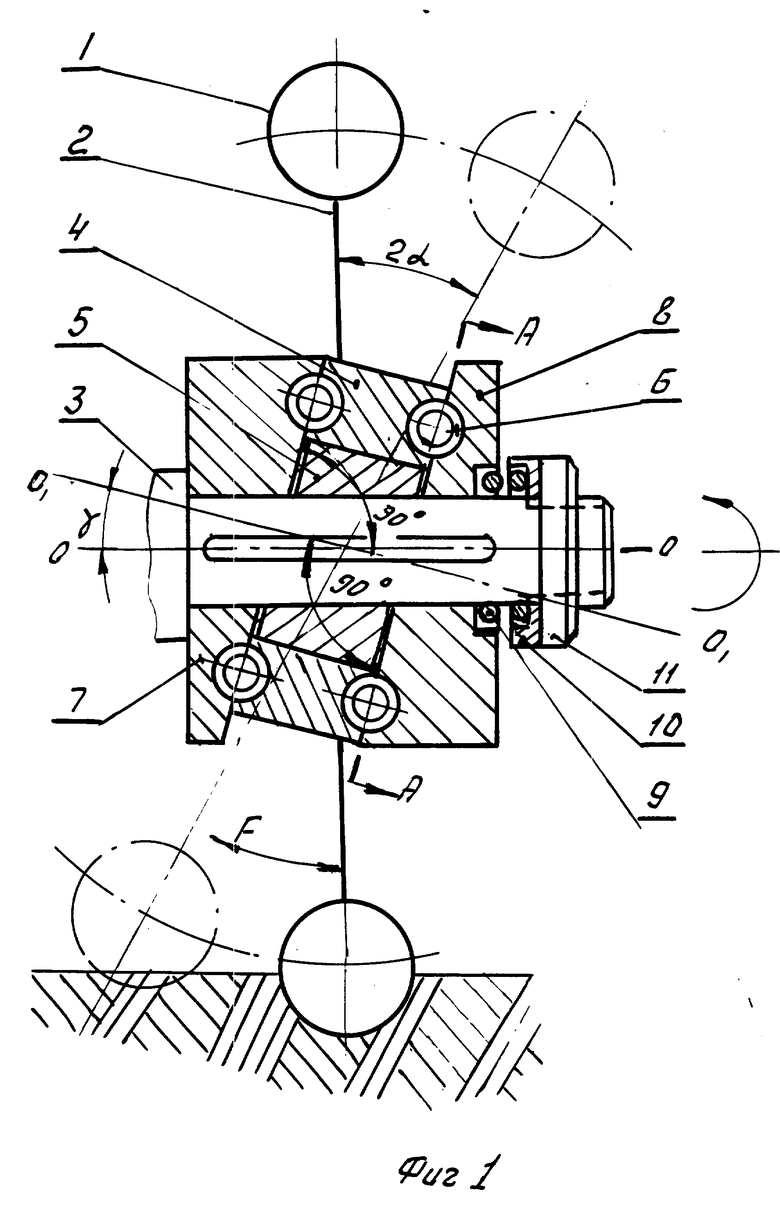
| Авторское свидетельство СССР N 755620, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
