Изобретение относится к движителям транспортных средств, а именно к устройству для передвижения инвалидных и грузовых колясок по ступенькам лестниц и выступам.
Известен колесно-шагающий движитель, содержащий ступицу с закрепленной на ней крестовиной, в радиальных лучах (рычагах) которой шарнирно на осях установлены опоры (опорные башмаки) в виде усеченных сегментов цилиндра, и механизм поворота опор в виде одинаковых зубчатых колес, попарно расположенных на ступице напротив шлицевых концов осей башмаков, одно из которых соединено со ступицей неподвижно, а другое поворотно, и шестерен, установленных на каждом конце оси с возможностью их осевого передвижения посредством силового привода для синхронного попеременного зацепления с неподвижными поворотными зубчатыми колесами (см. авт.св. СССР N 455876, кл. В 60 В 19/00, 1979).
Существенным недостатком известного движителя при реализации шагающего хода является наличие существенных энергозатрат на синхронизацию положения опорных башмаков, связанных с наличием открытых зубчатых пар, подверженных загрязнению и повышению трения в зацеплении; значительная материалоемкость ввиду использования однофункциональных элементов: рычагов только для передачи силы тяжести от ступицы к башмакам, зубчатых колес только для синхронизации вращения последних. К тому же устройство практически неработоспособно, если башмак устанавливается на выступ концом, так как при попытке отрыва от опоры нижнего башмака провернется и соскользнет с выступа башмак, взаимодействующий с ним.
Известен также движитель для преодоления препятствий, содержащий два внутренних звена (рычага), установленных на валу серединами с возможностью поворота, на каждом конце которых установлено шарнирно наружное звено, свободные концы каждой их пары имеют общий шарнир, на котором установлен ролик и свободно поворачивающийся опорный башмак, причем не менее двух роликов одновременно взаимодействуют с направляющей, а привод внутренних звеньев осуществляется цепной передачей (см. патент США N 2292298, кл. Н.Кл.305-1, 1940).
Существенным недостатком этого движителя является значительная энергоемкость в связи с потерями на трение в открытой паре ролик направляющая и большая собственная масса ввиду многоэлементности: не менее четырех башмаков, десяти рычагов, четырех роликов, направляющей. К тому же известный движитель имеет недостаточную проходимость, обусловленную программным (задаваемым направляющей) изменением положения башмаков, так как случайная его пробуксовка на ступеньках приведет к накоплению отставания от шага лестничного марша и срыву со ступенек. Наличие свободно установленных на осях башмаков также снижает проходимость ввиду возможности поворота и срыва со ступеньки башмака, установленного на нее носочной частью.
В последние годы разработан колесно-шагающий движитель, содержащий два внутренних звена (рычага), установленных серединами на ведущем валу с возможностью поворота, на каждом конце рычага установлен шарнирно опорный башмак, связанный средней частью шарнирной тягой с другим рычагом, причем рычаги связаны с валом посредством дифференциала.
Существенным отличием рабочего процесса этого движителя является способность чередовать шаговую и колесную фазы движения в зависимости от силы сопротивления, что позволяет получить при подъеме по лестнице (в одном из направлений вращения вала) траекторию центра, близкую к прямой линии, параллельной вершинами ступенек, при этом значительный вынос конца башмака за кромку ступеньки гарантирует ход без соскальзывания.
Существенным недостатком известного движителя является конструктивная сложность и материалоемкость, что обусловлено значительным числом элементов: четыре опорных башмака, детали дифференциального механизма изменения формы, двенадцать шарниров, четыре тяги. Большое число пар трения (двенадцать в шарнирах, две- в сопряжении рычагов с валом, две в дифференциале) снижает КПД движителя, т. е. делает его энергоемким. К тому же, плавность хода и проходимость при движении по лестнице зависит от направления вращения движителя, в частности, если он начинает взаимодействовать со ступенькой носком башмака, то траектория центра вала близка к прямой, если пяточной частью то траектория существенно нелинейна, а также значительно ниже при этом высота преодолеваемого выступа. Необходимо упомянуть, что сравнительно сложная конструкция обуславливает использование дорогостоящих материалов и оборудования при изготовлении, что повышает себестоимость товара, предназначенного для малообеспеченных потребителей хронических больных и инвалидов, госбюджетных организаций: больниц, домов престарелых и инвалидов, пансионатов.
Известно также устройство, которое может быть использовано по прямому назначению в качестве колесно-шагающего движителя. Устройство содержит ротор (ступицу) с прикрепленными радиально кривошипами (рычагами), каждый из которых концом шарнирно связан с серединой шатуна (опорного башмака), а также механизм изменения положения опорных башмаков, выполненный в виде ротора, установленного эксцентрично ступице и связанного с концом каждого башмака шарнирно рычагом (см. Крайнев А.Ф. Словарь-справочник по механизмам. М. Машиностроение, 1987, с.301).
Существенным недостатком устройства является конструктивная сложность и значительная материалоемкость, обусловленные значительным числом элементов: четыре опорных башмака, детали эксцентричного механизма управления положением башмаков, 13 шарниров, 8 рычагов. Большое число пар трения (сопряжения шарниров, рычагов, ротора) снижает КПД устройства, а плавность хода и проходимость зависят от направления вращения: если он начинает взаимодействовать со ступенькой носком башмака, то траектория центра близка к прямой, если пяточной частью то траектория существенно нелинейна и при этом ниже высота преодолеваемого выступа.
Цель изобретения обеспечение высокой проходимости движителя на выступах и лестничных маршах независимо от направления движения при меньших материало- и энергоемкости, а также конструктивной и технологической простоте устройства.
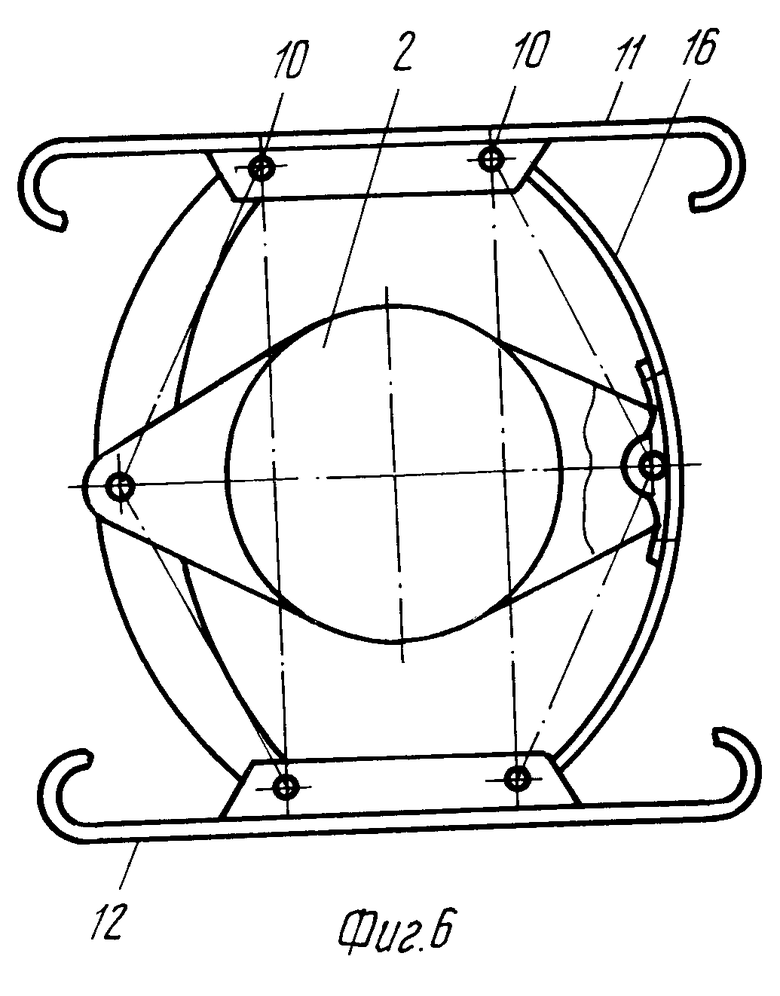
Для этого колесно-шагающий движитель, содержащий установленную на валу ступицу и по меньшей мере два расположенных симметрично относительно центра опорных башмака, каждый из которых связан шарнирно с двумя рычагами, имеет количество рычагов, равное количеству опорных башмаков, причем первый рычаг одним концом связан с задней частью по направлению вращения движителя первого башмака, другим концом с передней частью последующего башмака, задняя часть которого связана шарнирно с одним концом последующего рычага, другой конец которого шарнирно связан с передней частью последующего башмака, причем рычаги установлены средней частью на ступице с возможностью поворота в плоскости вращения движителя посредством шарниров, размещенных на ступице равномерно по окружности, к тому же шарниры на каждом башмаке равноудалены от его концов, а расстояние между ними меньше расстояния между шарнирами на ступице, связывающими рычаги, соединенные с башмаком. Кроме того, по меньшей мере один рычаг выполнен с возможностью поступательного однонаправленного движения его концов относительно ступицы. По первому варианту исполнения средний шарнир этого рычага установлен подвижно в радиальном направлении ступицы, по второму варианту он выполнен упругим в плоскости вращения движителя, по третьему варианту он выполнен в виде шарнирного двухзвенника, звенья которого одним концом установлены с возможностью поворота на оси ступицы, по пятому варианту этот рычаг, выполненный по первому варианту, подпружинен упругим линейным элементом, установленным радиально на ступице, один конец которого размещен в ее пазу, другой в пазу рычага. По шестому варианту исполнения движителя подошвы башмаков образованы прикрепленной к ним кольцевой эластичной лентой, имеющей прогиб между ними.
Преимущество предлагаемого устройства заключается в том, что благодаря трапециевидной шарнирной связи каждого башмака со ступицей, где большим основанием трапеции является ступица, а меньшим башмак, вращающий момент от приводного вала распределяется в заданном соотношении между всеми башмаками. В сочетании с наличием консолей на каждом башмаке (т.е. концов, выступающих за пределы шарниров, связывающих его с рычагами), движитель реализует колесно-шагающий ход, эффективный по проходимости и плавности при движении по ступенькам и бездорожью, без специальных дифференциальных механизмов управления положением башмаков. К тому же, предлагаемый движитель эффективно работает при наличии только двух, установленных диаметрально противоположно, башмаков, двух рычагов и шести шарниров, т.е. имеет на десять пар трения меньше, а значит выше КПД в сравнении с прототипом и преодолевает (как показали сравнительные испытания) ступеньки большей высоты. Использование подпружиненного рычага или выполнение его упругим позволяет получить дополнительный эффект: стабилизировать момент сопротивления шаговой фазе движения, уменьшив максимальное его значение в начальный период, что снижает крутящий момент, необходимый для движения, т.е. позволяет использовать привод меньшей мощности. Использование в качестве подошвы башмаков кольцевой эластичной ленты упрощает технологию изготовления и замены изношенных протекторов, увеличивает площадь контакта, а значит снижает глубину колеи при движении по слабонесущим поверхностям, к тому же защищает механизм от попадания в межрычажное пространство и заклинивания посторонними предметами (комки грунта, ветки, мусор) при движении по неподготовленным поверхностям.
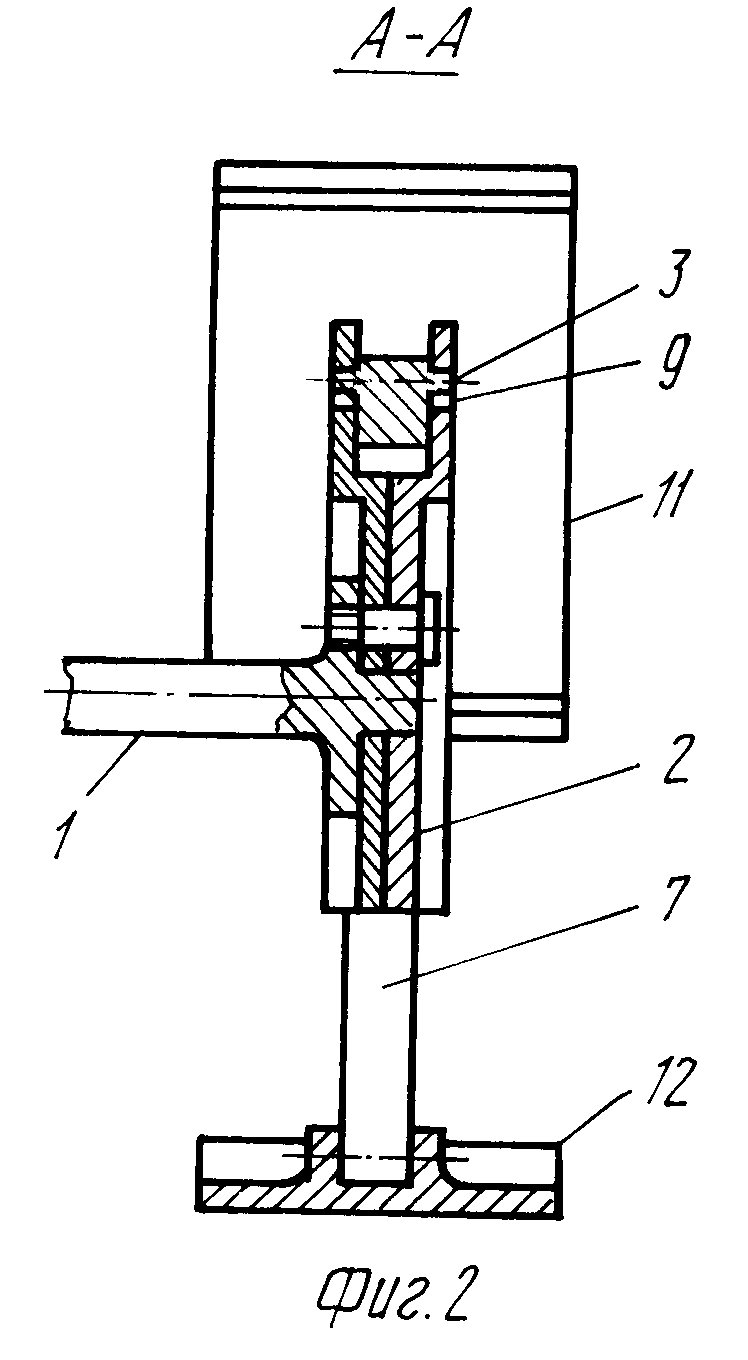
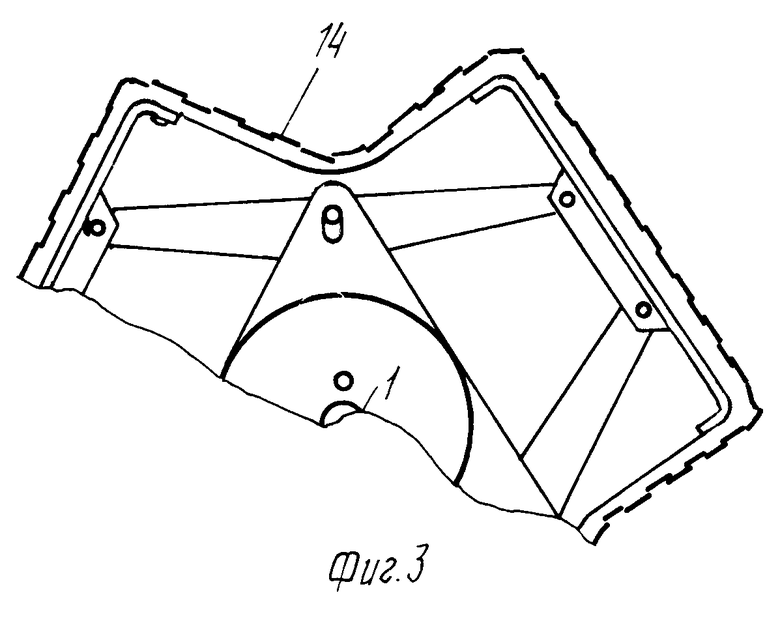
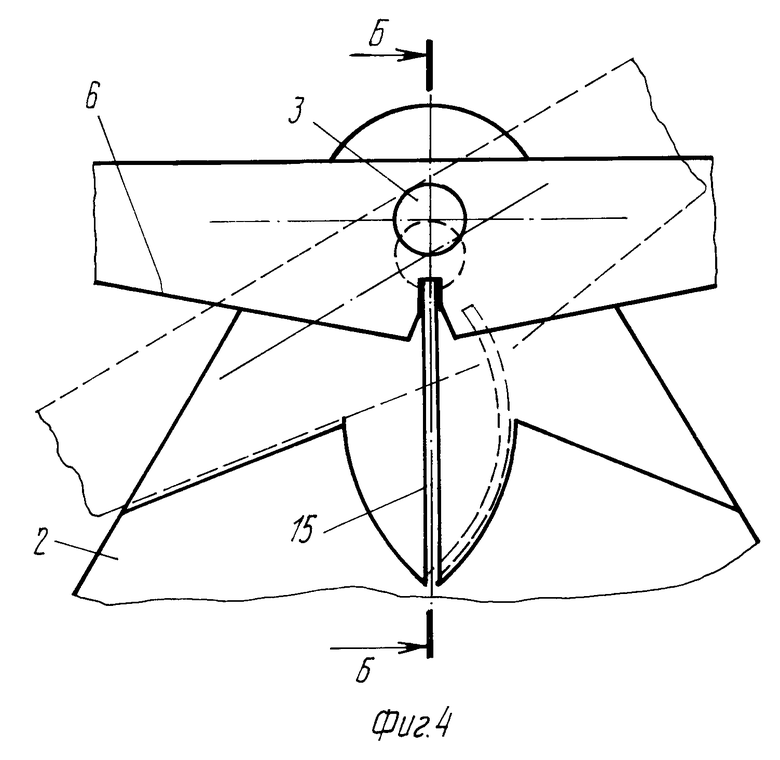
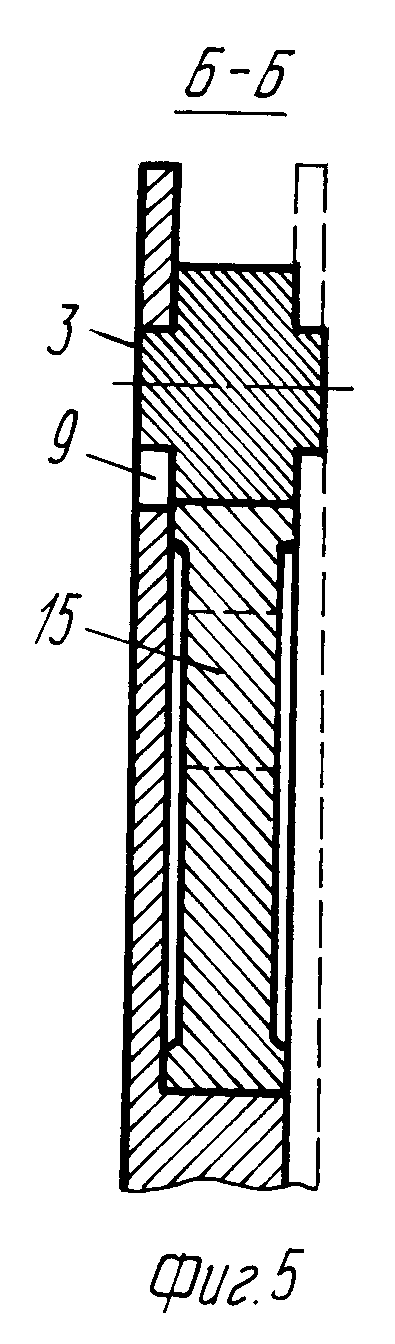
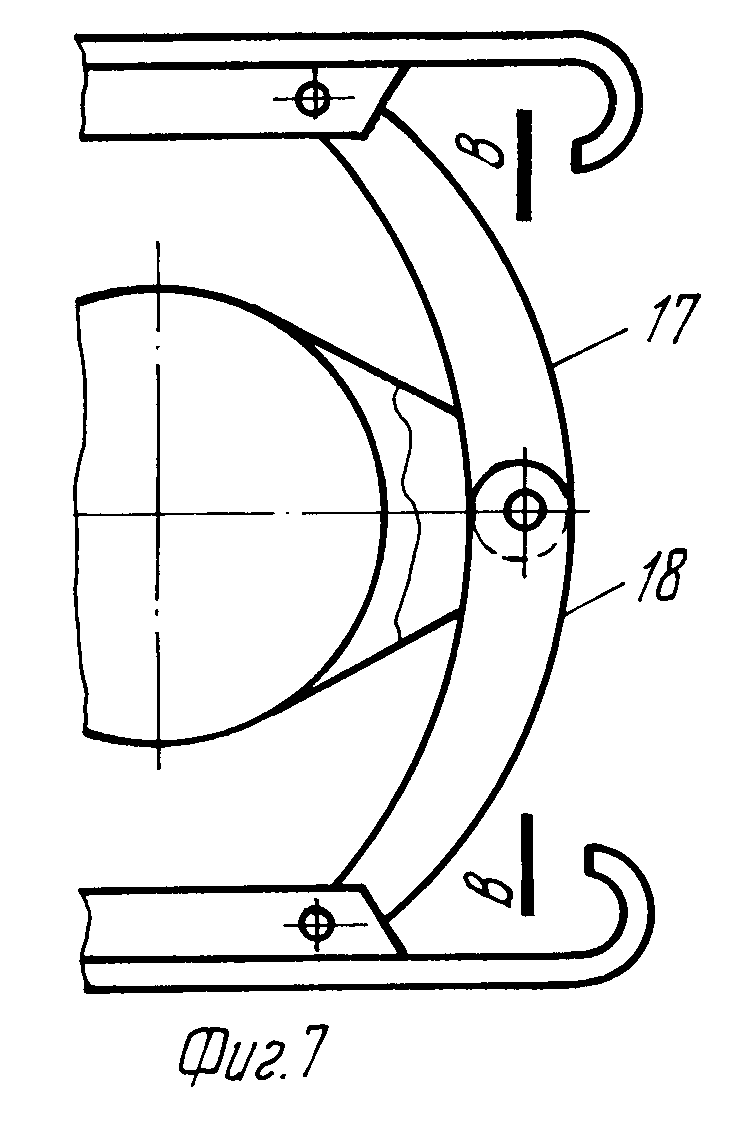
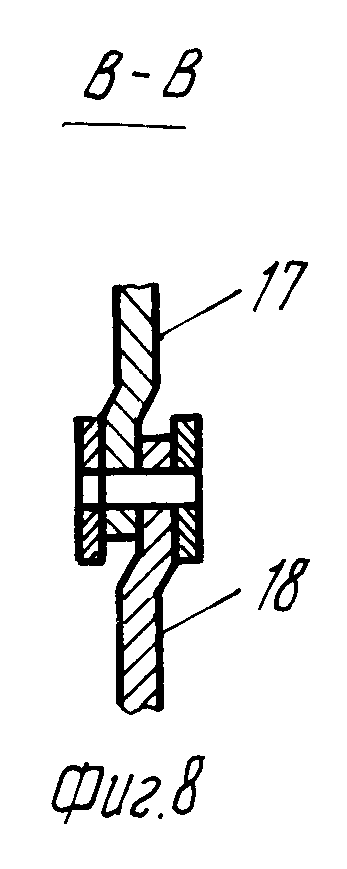
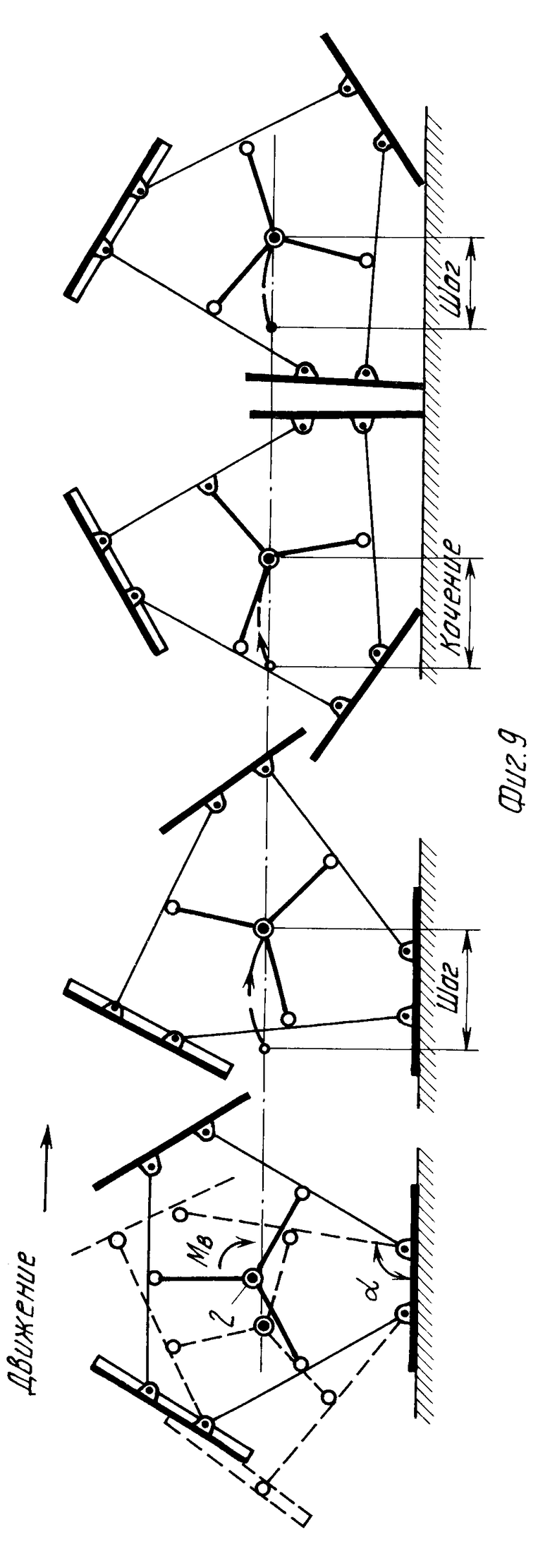
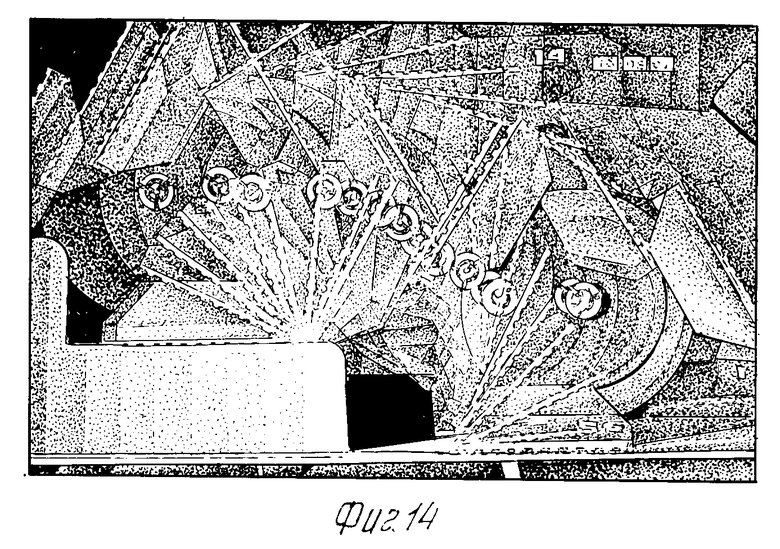
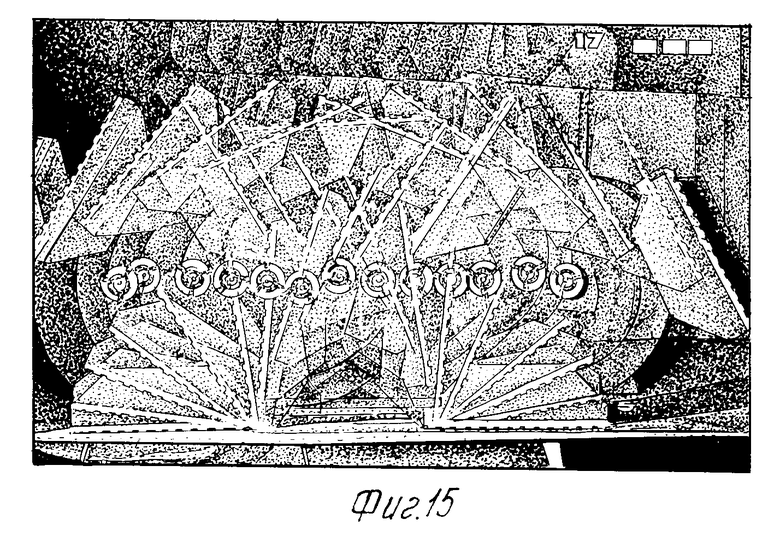
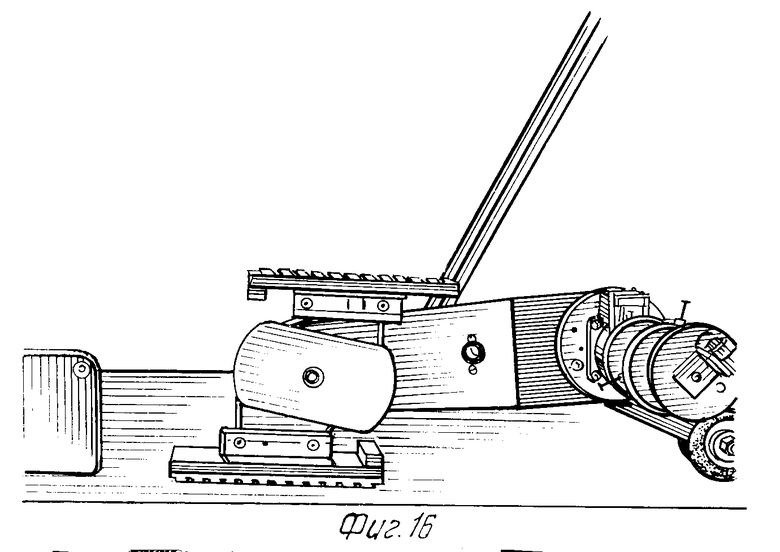
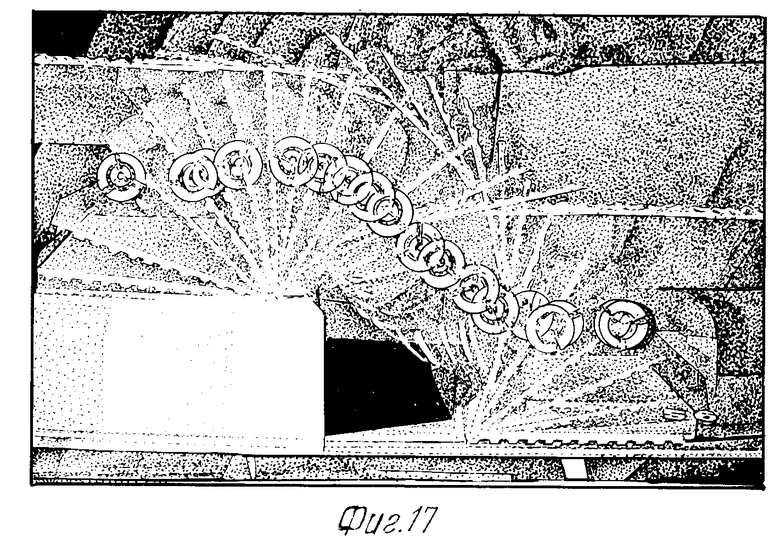
На фиг. 1 изображен движитель, вид сбоку; на фиг.2 разрез А-А на фиг.1; на фиг.3 пример выполнения подошвы опорных башмаков; на фиг.4 вариант установки рычага на ступице; на фиг. 5 разрез Б-Б на фиг.4; на фиг.6 вариант движителя с двумя опорными башмаками; на фиг.7 выполнение рычага движителя; на фиг.8 сечение В-В на фиг.7; на фиг.9 схема движения по плоскости устройства с тремя опорными башмаками; на фиг.10 схема движения по плоскости устройства с двумя опорными башмаками; на фиг.11 схема движения устройства с тремя опорными башмаками по лестнице; на фиг.12 схема движения устройства с двумя опорными башмаками по лестнице; на фиг.13-15 фотофрагменты лабораторных испытаний движителя с тремя опорными башмаками; на фиг.16-18 фотофрагменты лабораторных испытаний движителя с двумя опорными башмаками.
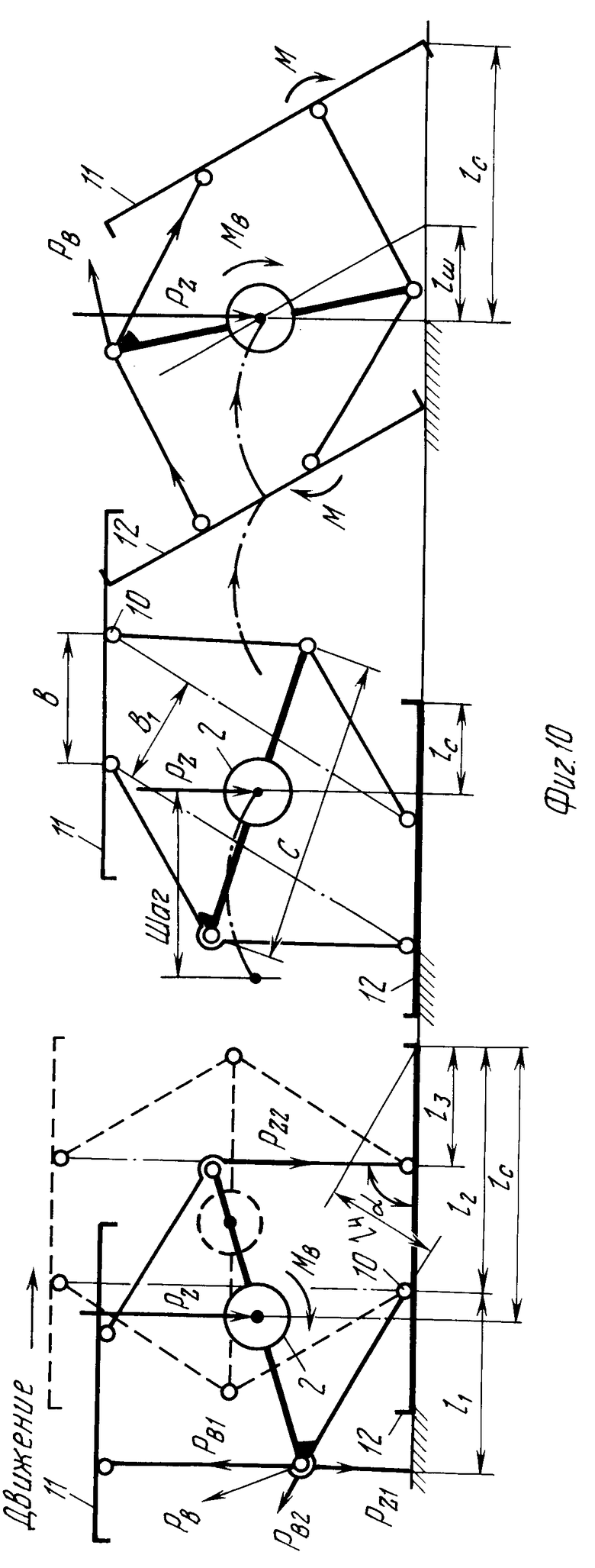
Колесно-шагающий движитель содержит (фиг.1 и 2) закрепленную на ведущем валу 1 ступицу 2, на которой симметрично относительно центра, т.е. по окружности через 120о, размещены шарниры 3-5, связывающие ступицу 2 со средними частями двуплечих рычагов 6-8, причем ось шарнира 3 размещена в радиальном пазу 9 ступицы, а угол поворота рычагов относительно ступицы 2 ограничен высотой ее проушин. Правый конец рычага 6 связан шарниром 10 с передней частью (при вращении движителя на фиг.1 против часовой стрелки) башмака 11, а левый конец с задней частью башмака 13, рычаг 7 концами связан с задней частью башмака 11 и передней частью 12, а рычаг 8 аналогично связан концами с башмаками 12 и 13. Расстояние между шарнирами на каждом башмаке, например на башмаке 12, меньше расстояния между шарнирами на ступице 2, в частности между шарнирами 4 и 5, т.е. каждый башмак связан со ступицей шарнирной равнобокой трапецией с образованием тупых углов α с примыкающими к ним рычагами. Кроме того, расстояние между шарнирами башмака меньше его длины, а установлены они симметрично относительно середины башмака. На примере исполнения по фиг.1 расстояние между шарнирами 10 равно 1/3 длины башмака. Каждый башмак снабжен подошвой с протектором, а вариант исполнения подошвы по фиг.3 предусматривает использование кольцевой эластичной ленты 14 с протектором, длина которой обеспечивает свободный прогиб в радиальном направлении к центру движителя. Для корректировки момента сопротивления шаганию движитель снабжен упругим элементом, который по фиг. 4 и 5 выполнен в виде рессоры 15, одним концом установленной в пазу ступицы 2, а другим в пазу рычага 6, ось шарнира которого размещена в пазу 9 ступицы. По варианту исполнения, показанному на фиг. 6, упругим элементом является рычаг 16, при этом оба шарнира ступицы 2 обеспечивают рычагам только вращательную степень свободы. Вариант исполнения рычага (фиг.7 и 8) в виде шарнирного двухзвенника, составленного из звеньев 17 и 18, исключает, как и по фиг.6, необходимость использования дополнительной степени свободы шарнира 3 посредством паза 9, показанного на фиг.1. Подвижность шарнира 3 в пазу 9 (фиг.1,2); использование одного упругого рычага 16 (фиг. 6); выполнение одного рычага двухзвенным (фиг.7,8) это технические эквиваленты, обеспечивающие возможность поступательного однонаправленного движения концов по меньшей мере одного рычага относительно ступицы. Поэтому в первый пункт формулы и введено это обобщающее понятие признак, обуславливающий возможность синхронного поворота рычагов относительно среднего положения, показанного на фиг.1 и 6. Необходимость этого признака наглядно поясняет средняя схема на фиг.10. При неизменном расстоянии b между шарнирами 10 опорных башмаков 11 и 12 и жестких рычагах движителя поворот звеньев из пунктирного положения в положение средней схемы возможно лишь при уменьшении расстояния с между шарнирами ступицы 2, так как уменьшается до значения b1 расстояние между осями, соединяющими шарниры 10 звеньев 11 и 12. Эта особенность предлагаемого движителя характерна для движителей с любым количеством опорных башмаков, поэтому поворот рычагов 6-8 на шарнирах 3-5 (фиг. 1), а значит и поворот опорных башмаков относительно центрально-симметричного положения на фиг.1 реализуется только при наличии возможности однонаправленного движения концов хотя бы одного рычага, компенсирующего изменение упомянутого расстояния b1. Поворот каждого опорного башмака на шарнирах 10 реализуется в пределах ограничения: угол α между плоскостью башмака и осями рычагов, связанных с ним, не должен быть меньше 90о, с учетом чего подбирается и необходимый угол поворота каждого рычага в проушинах на ступице.
Движитель работает следующим образом.
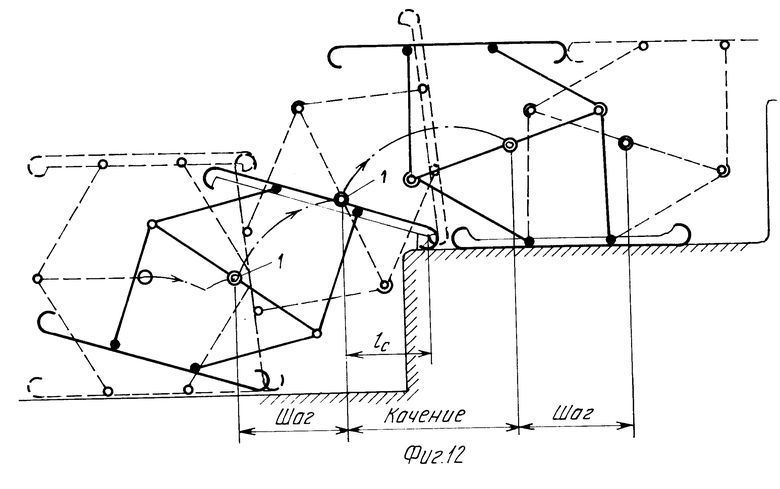
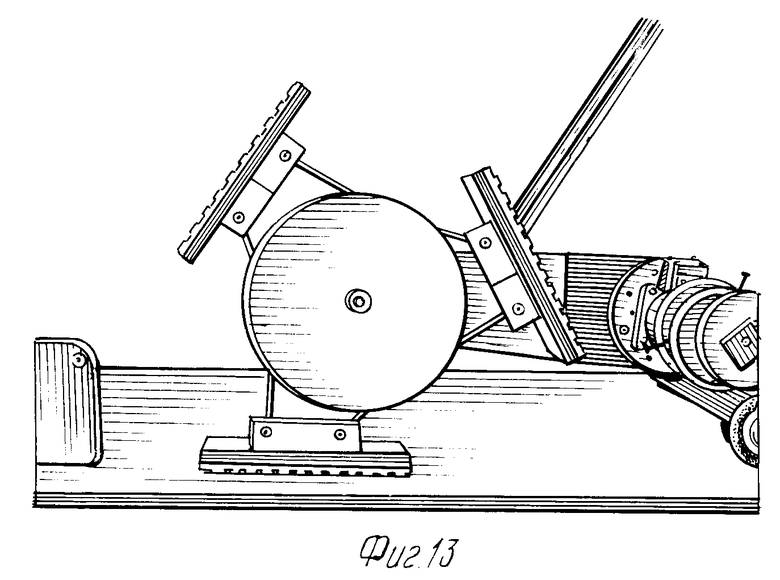
На фиг. 10, слева, показана сплошными линиями схема сил, действующих на движитель с минимальным числом опорных башмаков и без упругого элемента в схеме. Сила Pz, действующая на ведущий вал со стороны транспортного средства, раскладывается на две равные составляющие Рz1/Рz2, действующие со стороны ступицы 2 соответственно на левый и правый рычаги. При этом к левому рычагу приложен момент относительно шарнира 10, направленный против часовой стрелки: Мс1=Рz1˙l1, который фиксирует рычаг в крайнем левом положении. При подведении к ступице 2 от вала вращающего момента МВ, составляющая РВ1 окружной силы РВ, действующей на левый рычаг со стороны ступицы, дает момент относительно шарнира 10: МВ1=РВ1˙l1, направленный по часовой стрелке. Если сила РВ1 больше Рz1, то момент МВ1 начнет вращать левый рычаг относительно шарнира 10 по часовой стрелке, перемещая ступицу 2 и башмак 11 вправо относительно неподвижного нижнего башмака 12. При этом отрыву от опорной поверхности левого конца башмака 12 препятствует момент Мс2=Рz2˙l3, направленный против часовой стрелки и превышающий противоположный по направлению момент МВ2= РВ2˙l4 ввиду малости силы РВ2 (составляющей РВ), направленной вдоль нижней части левого рычага. По мере преобразования движителя в форму, показанную пунктирными линиями, угол α увеличивается в пределах тупого, а значит повышается и момент силы Рz2 относительно правого шарнира башмака 12, вращающий правый рычаг также по часовой стрелке. В итоге движитель примет форму по средней схеме фиг.10, т.е. реализует шаговую фазу движения, при этом длина шага определится углом поворота рычагов на ступице. В этом положении момент сопротивления качению Мск=Рz˙lс (в масштабе схем фиг.10) в три раза снизился за счет уменьшения плеча lс относительно левой схемы и движитель, сохранив эту форму, перекатится под действием вращающего момента со стороны ведущего вала в положение, показанное на левой схеме, т.е. установится с опорой на концы башмаков. В данном положении момент сопротивления качению Мск=Рz˙lс значительно больше момента сопротивления шаганию Мсш=Рz˙lш, поэтому движитель под действием моментов М от сил, направленных вдоль верхнего рычага и являющихся составляющими окружной вращающей силы РВ, повернет по часовой стрелке башмаки 11 и 12 относительно нижних шарниров, т.е. реализует шаговую составляющую движения в пределах углов поворота рычагов на ступице, после чего повторится фаза качения. Таким образом, трапециевидная двухрычажная связь каждого опорного башмака со ступицей и наличие концов, выступающих за предел межшарнирного расстояния (например, конец l3 на левой схеме фиг.10) обеспечивают колесно-шагающий режим движения, который сопровождается периодическим выносом вперед (по ходу движения) конца башмака, не взаимодействующего с опорной поверхностью, что обуславливает возможность преодоления движителем ступенчатого выступа. При использовании в устройстве упругого элемента, выполненного по фиг.4 или 6, работа, связанная с перемещением ступицы относительно опорного башмака в шаговой фазе, уменьшается в начальный период и увеличивается в конечный, что позволяет уменьшить максимальную величину вращающего момента МВ, необходимого для начала шага. В частности, при переходе движителя (фиг.10) из левого положения в положение пунктирного контура, работа сдеформированного в предыдующей фазе движения упругого элемента будет направлена на восстановление центросимметричной формы, что обусловит меньшее значение силы РВ1, а значит и вращающего момента МВ, необходимого для реализации шага в пределах левой схемы. При дальнейшем движении (переход к средней схеме фиг.10) вращать рычаги по часовой стрелке будет также и момент от вертикальной силы Рz, который компенсирует момент сопротивления изменению формы движителя, задаваемый жесткостью упругого элемента. Подъем по лестнице движитель также осуществляет последовательной реализацией колесной и шагающей фаз движения. Схема преодоления ступеньки движителем с двумя опорными башмаками показана на фиг.12, из которой следует, что при реализации шага приводной вал по пологой траектории существенно приближается к выступу, уменьшая плечо момента сопротивления качению до значения lс, после чего в фазе качения поднимается на ступеньку с опорой на башмак, выделенный двойной линией. Описанный характер движения подтверждают фотографии движения лабораторного образца (фиг.16), полученные при открытом затворе камеры и пульсирующим освещении (фиг.17 и 18).
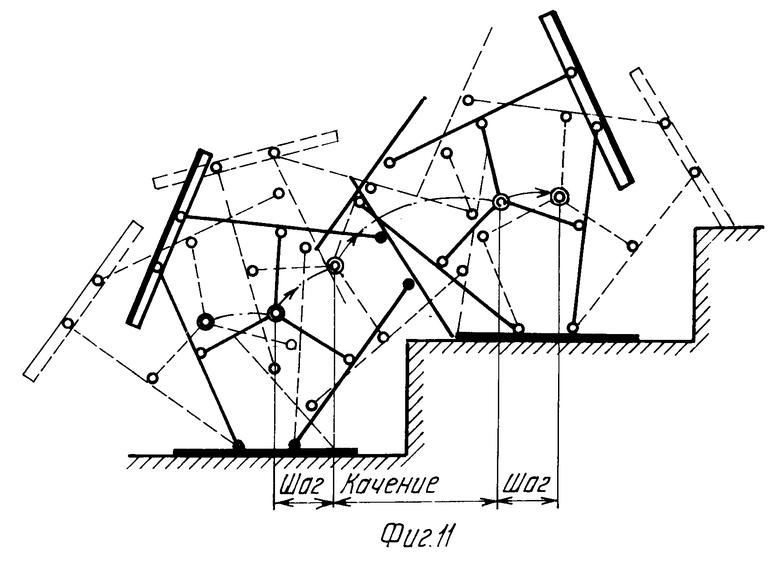
На основании результатов лабораторных испытаний движителей с двумя, тремя и четырьмя опорными башмаками можно заключить, что лучшим вариантом осуществления является трехопорный движитель по фиг.1 как с радиальным пазом в ступице, так и при выполнении одного рычага упругим. В частности, его движение по горизонтальной поверхности характеризуется минимальными вертикальными колебаниями приводного вала (фиг.9 и 15), причем чередование фаз по фиг.9 реализуется во всем диапазоне нагрузок на тяговом крюке, включая режим полного буксования. Ввиду аналогичности рабочих процессов устройств по фиг. 10 и 9 трехопорный движитель в этом плане не комментируется.
Испытания устройства с тремя башмаками и кольцевой подошвой по фиг.3 показали, что последняя не ухудшает проходимость на лестничных маршах (характер движения полностью соответствовал фиг.11 и 14), но значительно повышает сцепные свойства и проходимость при движении по сыпучим и болотистым поверхностям.
Предлагаемое изобретение наилучшим образом может быть использовано для передвижения по лестницам и пороговым препятствиям инвалидных колясок и кресел, включая возможность хода по неблагоустроенным площадкам у подъездов зданий, а также грузовых тележек при обслуживании многоэтажных помещений, не имеющих подъемников.
| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель транспортного средства Анопченко В.Г. | 1990 |
|
SU1790936A1 |
| ШАССИ ДЛЯ ПЕРЕДВИЖЕНИЯ ПО РАЗЛИЧНЫМ ОПОРНЫМ ПОВЕРХНОСТЯМ С КОЛЕСНО-ШАГОВЫМИ ДВИЖИТЕЛЯМИ | 2015 |
|
RU2628285C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| Шасси снегохода | 1987 |
|
SU1541100A1 |
| Колесо изменяемой формы | 1988 |
|
SU1526081A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
| Движитель транспортного средства Анопченко В.Г. | 1983 |
|
SU1117246A1 |
| Орбитально-траковый движитель | 2022 |
|
RU2778578C1 |
Использование: изобретение относится к движителям транспортных средств, а именно к устройству для передвижения инвалидных и грузовых колясок по ступенькам лестниц и выступам. Сущность изобретения: в основу изобретения положена задача обеспечения высокой проходимости движителя на выступах и лестничных маршах независимо от направления движения при меньших материало- и энергоемкости, а также конструктивной простоты и технологичности устройства, содержащего закрепленную на ведущем валу 1 ступицу 2, на которой симметрично центру по окружности через 120° размещены шарниры 3 - 5, связывающие ступицу с средними частями двуплечих рычагов 6 - 8, причем ось шарнира 3 установлена подвижно в радиальном направлении ступицы. Первый рычаг 6 одним концом связан с задней частью башмака 13, другим концом - с передней частью башмака 11, задняя часть которого связана шарнирно с одним концом последующего рычага 7, другой конец которого шарнирно связан с передней частью башмака 12, а рычаг 8 аналогично связывает башмаки 12 и 13. Шарниры 10 на каждом башмаке равноудалены от его концов, а расстояние между ними меньше расстояния между шарнирами на ступице, связывающими рычаги, соединенные с башмаком. 5 з.п. ф-лы, 18 ил.
| Крайнев А.Ф | |||
| Словарь-справочник по механизмам | |||
| - М.: Машиностроение, 1987, с.301. |
