Изобретение относится к области контроля движения транспортных средств и может быть использовано, в частности, в системах централизованного контроля подвижных единиц маршрутизированного транспорта.
Наиболее близким по техническому решению к предлагаемому устройству является устройство по патенту РФ 1538178 [1] содержащее маршрутные датчики, на транспортном средстве коммутатор, блок проверки старта, блок сравнения номера транспортного средства, формирователь сигнала запуска, двухканальный приемопередатчик, блок управления, цифроаналоговый преобразователь, датчик пройденного пути, блок кодирования, формирователь кода маршрутного датчика, тангенту, микротелефонную трубку, датчик положения микротелефонной трубки, индикатор отклонений от графика, приемник и клавиатуру, на пункте контроля - приемопередатчик первого канала, преобразователь последовательного входа в параллельный, блок согласования, блок кодирования, блок обработки информации и приемопередатчик второго канала. Это устройство позволяет определять и отображать на мнемосхеме маршрутов местоположение ПЕ, их отклонение от графиков движения, выводить величину этого отклонения на табло водителей и диспетчера, позволяет осуществлять радиосвязь диспетчер-водитель по инициативе любого из них, а также информировать и выводить данные графиков исполненного движения.
Недостатком упомянутого устройства является то, что при наращивании парка ПЕ увеличивается время ожидания предоставления речевой связи водителя транспортного средства (ТС) с пунктом контроля (ПК) по инициативе водителя. Такое ограничение оперативности является нежелательным фактором при возникновении экстремальных ситуаций на магистралях транспортной сети.
Предполагаемое изобретение решает задачу повышения оперативности устройства. Это достигается путем введения в цикл запросов ТС кодограммы запроса аварийной ТС. Эта кодограмма повторяется в течение цикла запроса через равные промежутки времени, например, через одну секунду. В аппаратуру ТС вводятся блок аварийного вызова, блок сравнения номеров и мультиплексор, на пункте контроля внедряется алгоритм опроса аварийного ТС и обработки аварийного вызова, выход блока аварийного вызова соединен с входом клавиатуры, с первым входом мультиплексора и четвертым входом блока сравнения номеров, первый, второй и третий входы которого подключены к одноименным выходам блока проверки старта. Первый выход блока сравнения номеров соединен с первым входом блока управления и со входом блока аварийного вызова. Второй, третий и четвертый выходы блока сравнения номеров подключены соответственно к входу ЦАП, к входу формирователя сигнала запуска и к третьему входу мультиплексора, второй вход которого соединен с выходом формирователя кода маршрутного датчика, а выход с первым входом блока кодирования.
На фиг. 1 приведена блок-схема устройства для контроля движения транспортных средств; на фиг. 2 функциональная схема блока кодирования; на фиг. 3 запросная кодограмма; на фиг. 4 функциональная схема блока проверки старта; на фиг. 5 функциональная схема блока сравнения номеров; на фиг. 6 - функциональная схема блока управления; на фиг. 7 функциональная схема коммутатора; на фиг. 8 функциональная схема блока аварийного вызова; на фиг. 9 и 10 блок -схема алгоритма программы, выполняемой блоком обработки информации; на фиг. 11 временные диаграммы сигналов на выходах блока согласования.
Устройство для контроля движения транспортных средств содержит маршрутные датчики 1, на транспортном средстве коммутатор 2, блок 3 проверки старта, блок 4 сравнения номеров, формирователь 5 сигнала запуска, двухканальный приемопередатчик 6, блок 7 управления, цифроаналоговый преобразователь 8, датчик 9 пройденного пути, блок 10 кодирования, формирователь 11 кода маршрутного датчика 1, мультиплексор 12, тангенту 13, микротелефонную трубку 14, датчик 15 положения микротелефонной трубки, индикатор 16 отклонений от графика; приемник 17, блок 18 аварийного вызова и клавиатуру 19, на пункте контроля приемопередатчик 20 первого канала, преобразователь 21 последовательного кода в параллельный, блок 22 согласования, блок 23 кодирования, блок 24 обработки информации и приемопередатчик 25 второго канала.
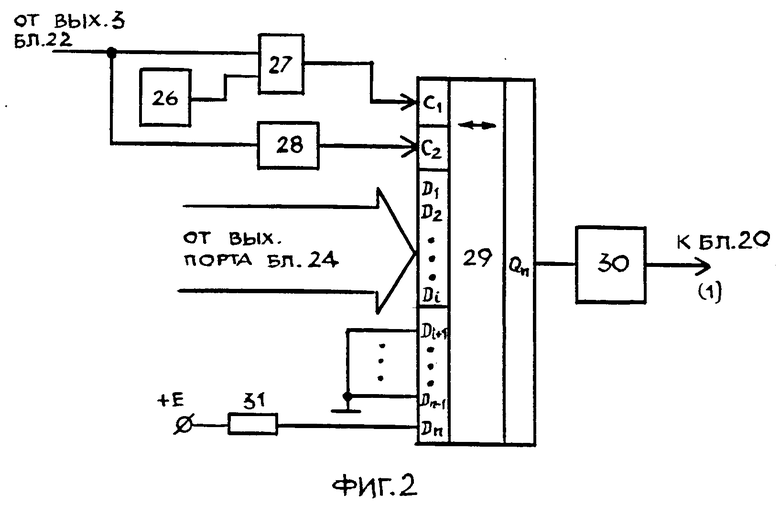
Блок 23 кодирования состоит из генератора 26 тактовых импульсов, элемента И 27, одновибратора 28, регистра 29 сдвига, модулятора 30 и задающего резистора 31.
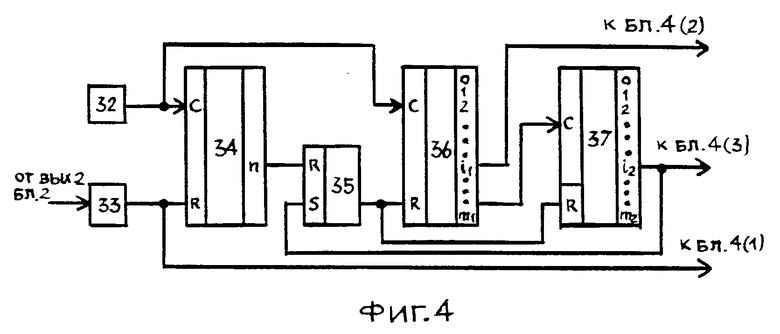
Блок 3 проверки старта содержит генератор 32 импульсов, демодулятор 33, счетчик-делитель 34, триггер 35, счетчик -дешифратор 36 и счетчик 37.
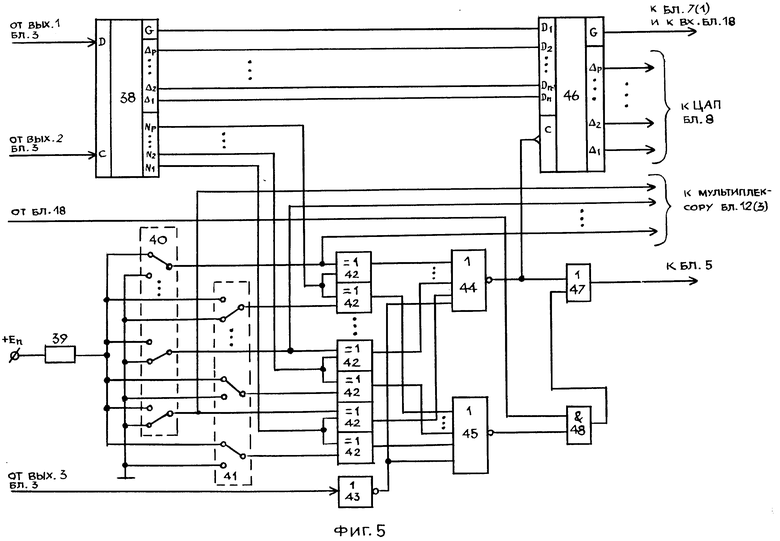
Блок 4 сравнения номеров содержит регистр 38 сдвига, задающий резистор 39, две группы переключателей 40 и 41, группу элементов Исключающее ИЛИ 42, элемент НЕ 43, два элемента ИЛИ-НЕ 44 и 45, параллельный регистр 46, элемент 47 2ИЛИ, элемент 48 И.
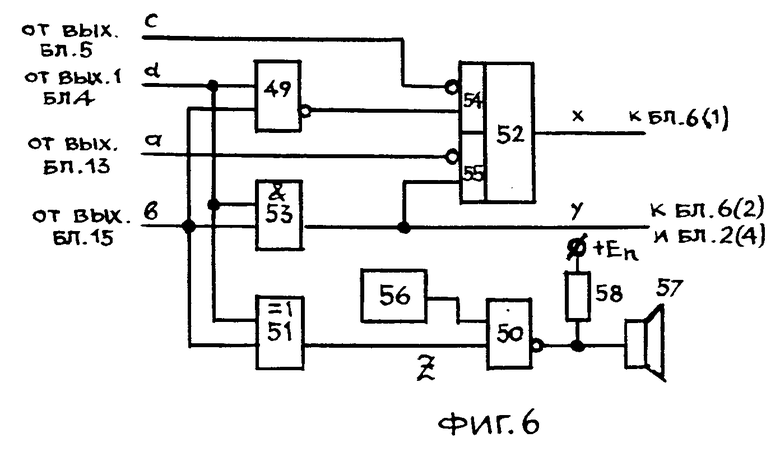
Блок 7 управления содержит элементы И-НЕ 49 и 50, элемент Исключающее ИЛИ 51, элемент ИЛИ 52, элемент И 53, элементы 54 и 55 запрета, генератор 56 тональной частоты, микротелефон 57 и задающий резистор 58.
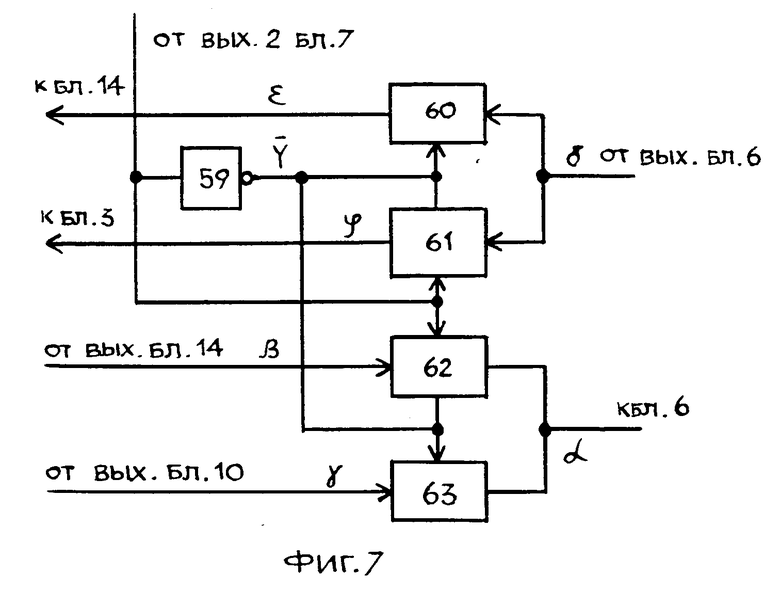
Коммутатор 2 содержит элемент НЕ 59 и ключи 60-63.
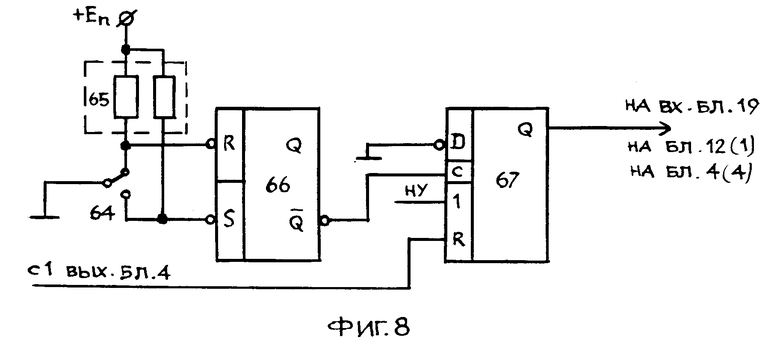
Блок 18 аварийного вызова содержит двухпозиционный контакт 64, два токоограничивающих резистора 65 и два триггера 66 и 67.
Блок обработки информации 24 может быть выполнен на базе ПЭВМ.
Датчик 9 пройденного пути преобразует угловые перемещения вала тягового двигателя транспортного средства в код, корректируемый установкой в ноль по сигналу маршрутного датчика 1.
Блок 10 кодирования по сигналу запуска преобразует параллельный двоичный код, формируемый блоками 9, 12 и 19, в последовательный код, подаваемый на второй вход коммутатора 2.
Формирователь 11 кода датчика преобразует в цифровой код частотно -модулированный сигнал i-го маршрутного датчика.
На блок-схеме алгоритма программы (фиг. 9 и 10) приняты следующие обозначения блоков:
1. Введение даты и времени.
2. Вызов мнемосхемы маршрута на экран дисплея.
3. Присвоение каждому отрезку маршрута двух определенных позиций на дисплее вдоль мнемосхемы маршрута: П1(L) для прямого движения; П2(L) для обратного.
4. Введение данных:
а) список кодов маршрутных датчиков в порядке от начала маршрута М1, M2. Mj, Mp;
б) удаление маршрутных датчиков от начала маршрута Q1, Q2. Qj,Qp;
в) введение графиков расписаний (функция местоположения транспортных средств от времени в виде таблицы соответствий).
5. Ввод начальных значений:
Δi 0; Gi 0, ПОНДi 0,
где i 1 n порядковый номер транспортного средства;
ПОНДi признак определения направления движения i-го транспортного средства;
Δi отклонение от графика i-го транспортного средства;
Gi команда вызова на борт i-го ТС.
6. Разрешение прерываний от клавиатуры ПЭВМ: занесение в вектор прерывания от клавиатуры адреса подпрограммы обработки этих прерываний; занесения в вектор прерывания от алфавитно-цифрового печатающего устройства (АЦПУ) адреса подпрограмм обработки этих прерываний от АЦПУ; присвоение прерываниям от АЦПУ наивысшего приоритета.
7. Ввод начального значения
К 1,
где К номер цикла.
8. i 1, l 1.
9. Проверка В 1? где В значение сигнала с третьего выхода блока 22 согласования.
10. Вывод на выход блока 24 обработки информации для транспортных средств (Ni, Δi Gi), где Ni номера транспортных средств.
11. Проверка А 1? где А значение сигнала с второго выхода 22 согласования.
12. Считывание принятой информации, поступившей на информационных входы блока 24 обработки информации, MiK, LiK, KiK, MiK код маршрутного датчика или идентификационный номер ТС при ответе на запрос аварийного ТС; LiK код перемещения ТС; KiK код сигнала блока 19.
13. i iав? где iав указатель кода для запроса аварийного ТС.
14. W Qj LiK, где W абсолютное удаление ТС от начала маршрута (НМ) в отрезках (дискретах) маршрута.
15. Символ ТС _→ П2(L), соответствующую W.
16. Определение по известному местоположению из графика планируемого времени tплан.
17. Определение отклонения от графика: Δi tплан tтек, где tтек текущее время.
18. Достигло ли i-e ТС НМ?
19. ПОНДi +1
20. W Qj + LiK.
21. Символ ТС -> П1(L), соответствующую W.
22. Определение по известному местоположению из графика планируемого времени tплан.
23. Определение отклонения от графика: Δi tплан tтек.
24. Достигло ли i-e TC KM?
25. ПОНДi -1.
26. Вывод на дисплей сообщения, соответствующего коду К с символом i-го ТС.
27. Соответствует ли местоположение i-го ТС расположению какой-либо контрольной точки.
28. tтек занести в массив графика исполненного движения i-го ТС в столбец данной контрольной точки.
29. Проверка ПОНДi 0?
30. Определение JiK для MiK, где J порядковый номер маршрутного датчика MiK в списке кодов маршрутных датчиков.
31. Проверка К 1?
32. JiK Ji(K-1)?
33. MiK, LiK, KiK, tтек _→ ОЗУ.
34. ПОНДi +1
35. ПОНДi -1
36. ОЗУ заполнено?
37. ОЗУ -L ВЗУ.
38. Резервирование массива для графика исполненного движения i-го ТС.
39. l 10.
40. i n?
41. K K + 1.
42. i i + 1, l l + 1.
43. l 1, i ifd.
44. MiK является номером ТС?
45. Nав MiK, где Nав код номера ТС, с которого пришел аварийный вызов.
46. Вывод на экран дисплей аварийного вызова от ТС с номером Nав.
47. Символы с клавиатуры -L Mсим (массив символов).
48. Mсим определяет номер ТС?
49. Сброс команд?
50. Команда на печать исполненного движения i-го ТС?
51. Определение i.
52. Gi 1.
53. Gi 0; i 1 n.
54. Разрешение прерываний от АЦПУ, q 1, где q порядковый номер символа массива графика исполненного движения i-го ТС.
55. Выход из прерывания.
Подпрограмма обработки прерываний от АЦПУ ПЭВМ.
56. Вывод q-го символа массива графика исполненного движения i-го ТС.
57. Конец массива?
58. Запрещение прерываний от АЦПУ.
59. q q + 1.
60. Выход из прерывания.
Устройство для контроля движения транспортных средств работает следующим образом.
Блок 22 согласования на своих выходах формирует сигналы (фиг. 11), обеспечивающие согласованную во времени работу блоков устройства. По сигналу с третьего выхода блока 22 согласования, поступающему на второй управляющий вход блока 24 обработки информации, на выходы последнего выводится информация для передачи в эфир, поступающая на первую группу информационных входов регистра сдвига 29. По этому же сигналу открывается элемент И 27 для прохождения тактовых импульсов от генератора 26 тактовых импульсов и запускается одновибратор 28, который формирует сигнал параллельной записи информации, поступившей на информационные входы первой группы регистра 29 сдвига. С выхода последнего информация в последовательном коде (фиг. 3) поступает на вход модулятора 30. С выхода модулятора 30 сигнал поступает на вход приемопередатчика 20 первого канала, чем обеспечивается преобразование логических "0" и "1". По приходу стартового импульса (фиг. 3) запросной кодограммы сигнал "0" разрешает работу счетчика -делителя 34. Коэффициент деления n выбирается по условию
где Tг период частоты следования импульсов с генератора 32 импульсов;
tстарт длительность стартового импульса запросной кодограммы.
Как только с демодулятора 33 приходит стартовый импульс, удовлетворяющий указанному условию, на выходе счетчика-делителя 34 появляется импульс, переключающий триггер 35 в нулевое состояние, чем разрешается работа счетчика дешифратора 36 и счетчика 37.
Коэффициент счетчика-дешифратора 36 m1 выбирается по условию
где Fг частота генератора 32;
fm скорость передачи информации, бит/с.
Счетчик 37 подсчитывает количество битов информации после старта. Счетчик -дешифратор 36 формирует на своих выходах сигналы "1", соответствующие состоянию счетчика. С его первого выхода снимается стробирующий сигнал, попадающий в середину бита. По окончании приема информации на выходе счетчика 37 появляется сигнал, обеспечивающий переключение триггера 35 в исходное состояние, т.е. перевод блока 3 проверки старта в исходное состояние.
На блок 4 сравнения номеров с блока 3 проверки старта поступают следующие сигналы: с выхода демодулятора 33 кодограмма в последовательном коде, стробирующий импульсы с первого выхода счетчика-дешифратора 36, сигнал окончания приема информации с выхода счетчика 37.
С первого выхода блока 3 проверки старта на информационный вход регистра 38 сдвига поступает информация в последовательном двоичном коде. Запись информации в регистр 38 сдвига начинается с первого бита кодограммы, следующего за стартом. Под действием стробирующих импульсов, приходящих со второго выхода блока 3 проверки старта, регистр 38 сдвига заполняется информацией, передаваемой с пункта контроля (N, ±Δ G). Разряды регистра 38 сдвига, в которые попадает передаваемый номер, соединены каждый с первыми входами соответствующей пары элементов 42 Исключающее ИЛИ, вторые входы одного элемента с помощью переключателя 40 подключены к шинам "0" или "1" в зависимости от кодированного номера транспортного средства. Вторые входы другого элемента Исключающее ИЛИ через переключатель 41 подключены к шинам "0" или "1" в зависимости от кода аварийного номера, который один для всех ТС. Если номер в запросной кодограмме совпадает с закодированным номером на транспортном средстве (закодированном с помощью переключателей 40), сигнал окончания приема информации с третьего выхода блока 3 проверки старта, пройдя через элемент НЕ 43, формирует стробирующий сигнал на выходе элемента ИЛИ-НЕ 44 для записи информации в параллельный регистр 46 с регистра 38 сдвига. Этим же сигналом, который поступает на формирователь 5 сигнала запуска с выхода элемента 47 ИЛИ, аппаратура транспортного средства переводится в режим передачи информации. В случае сравнения аварийного номера, закодированного переключателями 41, с номером в кодограмме, сигнал с элемента 45 ИЛИ-НЕ пройдет через элемент 48 И только тогда, когда посредством контакта 64 в блоке 18 аварийного вызова выход триггера 67 установится в единицу (будет сформирована команда аварийного вызова). Запуск на передачу аппаратуры ТС произойдет аналогично, как и при сравнении номера транспортного средства, только не будет обновления информации в параллельном регистре 46. Учитывая то, что запрос аварийного ТС осуществляется, например, через каждые 10 запросов (интервал времени около одной секунды), команда об экстренном вызове от транспортного поступит на пункт контроля через указанный интервал времени после подачи команды на ТС. Вероятность того, что одновременно потребуется более одного экстренного вызова в интервал времени, необходимого для обработки одного аварийного вызова очень мала. Если этой произойдет, то тогда команда требования экстренной связи поступит от транспортных средств в их очередной запрос, так как одновременное включение на передачу более одной аппаратуры не позволит надежно идентифицировать ТС по запросу аварийного ТС. Разряд в параллельном регистре 46, отвечающий за вызов на речевую связь водителя, подключен к блоку 7 управления и к входу блока 18 аварийного вызова. При поступлении на борт ТС команды вызова на речевую связь происходит сброс команды аварийного вызова по входу R-триггера 67 (блок 18). Остальные разряды параллельного регистра 46 соединены с входами цифроаналогового преобразователя 8.
Работа блока 7 управления описывается таблицей истинности, соответствующей логической схеме, представленной на фиг. 6, где
а значение сигнала от тангенты 13 (1 нажатие, 0 отжатие);
b значение сигнала от датчика 15 положения микротелефонной трубки (1 - трубка взята; 0 трубка вставлена в трубкодержатель);
с сигнал от формирователя 5 сигнала запуска (1 активный, 0 - пассивный);
d G информация о вызове блока 4 (1 вызов есть, 0 вызова нет);
X функция режима радиостанции (1 прием, 0 передача);
Y функция переключения каналов приемопередатчика 6 (0 первый канал, 1 второй канал);
Z функция включения звукового сигнала (1 сигнализация включена; 0 - выключена).
При работе на первом канале двухканальный приемопередатчик 6 работает в режиме приема/передачи цифровой информации и ее первый вход и выход посредством коммутатора 2 подключаются к выходу блока 10 кодирования и к входу 3 блока проверки старта.
При переключении двухканального приемопередатчика 6 с первого канала на второй и первый вход и выход его посредством коммутатора 2 подключаются соответственно к выходу и входу микротелефонной трубки 14.
Обработка поступающей на пункт контроля информации и формирование передаваемой на транспортное средство осуществляется в соответствии с блок -схемой алгоритма, представленного на фиг. 9 и 10.
После пуска программы блок 24 обработки информации (ПЭВМ) выполняет ряд подготовительных операций (1 8 блоки блок-схемы алгоритма).
Затем блоком 9 (фиг. 9) производится опрос готовности аппаратуры на пункте контроля к режиму запроса i-го транспортного средства. Флаг готовности (В) выставляется блоком 22 согласования на втором входе блока 24. При В 1 на выход блока 24 обработки информации поступает информация (Ni, Di Gi). С выхода блока 23 кодирования на вход приемопередатчика 20 первого канала приходит тональный сигнал частотного (фазового) модулятора. В этом время аппаратура транспортного средства, работая в режиме приема информации, определяет сигнал старта и сравнивает номер в запросной кодограмме со своим номером или, если на борту сформирован аварийный вызов, с кодом аварийного номера. То транспортное средство, номер которого совпал с номером, посланным пунктом контроля, принимает кодограмму. В информации, принятой на транспортном средстве, содержится код об отклонении от графика и команда на борт о вызове на речевую связь.
При работе устройства в первом цикле (K 1) отклонение и команда о вызове будут иметь значения Δi 0; Gi 0; i 0 n). В соответствии с этим стрелка индикатора отклонения от графика установится в нейтральное положение 0, и вызова на речевую связь не последует.
После принятия информации аппаратура i-го транспортного средства переводится в режим передачи информации на пункт контроля. В этом время аппаратура на пункте контроля находится в состоянии ожидания флага готовности на ввод информации в память ПЭВМ. После приема информации от i-го транспортного средства с выходов преобразователя 21 последовательного кода в параллельный принятая информация Mik, Lik, Kik поступает в блока 24 обработки информации. Эта информация проходит последовательную обработку согласно алгоритму программы, после чего опрашивается следующее транспортное средство. После, например, десяти запросов транспортных средств, изучается кодограмма на запрос аварийного вызова с номером Nав. По принимаемой информации в следующих циклах определяются местоположения всех транспортных средств на маршруте. По местоположению транспортного средства определяется один из графиков расписание плановое время прибытия в данную точку маршрута (методом интерполяции по заданным контрольным точкам графиков - расписаний). Затем, если местоположение транспортного средства соответствует расположению контрольной точки на маршруте, то tтек заносится в массив формирования исполнения движения i-го транспортного средства (блоки 27 и 28 блок-схема алгоритма). По плановому времени и текущему определяется отклонение от графика i-го транспортного средства и заносится в буфер вывода информации для i-го транспортного средства в Δi В дальнейшем эта информация, поступив на борт транспортного средства, индицируется на индикаторе отклонения от графика.
Для речевой связи диспетчера с водителем на клавиатуре ПЭВМ набирается номер транспортного средства. Совершается прерывание от клавиатуры и программа переходит по началу адреса подпрограммы обработки прерывания от клавиатуры. Подпрограммой по номеру транспортного средства определяется его номер в цикле i и Gi присваивается значение вызова Gi 1. Приняв эту информация, аппаратура i-го транспортного средства срабатывает таким образом, что при вставленной в трубкодержатель микротелефонной трубки 14 микротелефон 57 блока управления 7 начинает излучать звуковой сигнал. При поднятии трубки 14 звуковая сигнализация прекращается и двухканальные приемопередатчик 6 переходит на второй канал. Речевая связь осуществляется с диспетчером через одноканальный приемопередатчик 25 второго канала. После сеанса радиосвязи водитель вставляет микротелефонную трубку 14 в трубкодержатель, а диспетчер набирает на клавиатуре символ сброса команд. Когда инициатором сеанса связи является водитель, он посылает команду вызова на телефон с помощью клавиатуры 19 на транспортном средстве. Если требуется экстренное предоставление речевой связи, то водитель с помощью блока аварийного вызова формирует это требование. В этом случае на пункте контроля сообщение о требовании экстренного вызова будет принято практически мгновенно (например, через одну секунду). Эта информация, принятая на пункте контроля, будет преобразована в команду диспетчеру на экране дисплея микроЭВМ. После чего диспетчер проделает описанные операции для осуществления речевой связи.
Для осуществления вывода графика исполненного движения i-го транспортного средства на клавиатуре необходимо набрать его номер с символом печати графика. Подпрограмма обработки прерываний от клавиатуры определяет i транспортного средства и дает разрешение на прерывание от АЦПУ. Подпрограмма обработки прерываний от АЦПУ осуществляет вывод на АЦПУ графика исполненного движения. После окончания вывода производится запрещение прерываний от АЦПУ и аппаратура на пункте контроля возвращается в исходное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2094853C1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| Устройство для контроля движения транспортных средств | 1990 |
|
SU1836714A3 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| Устройство для контроля движения транспортных средств | 1989 |
|
SU1695352A1 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |




Изобретение относится к области контроля движения транспортных средств и может быть использовано, в частности, в системах централизованного контроля подвижных единиц маршрутизированного транспорта. Изобретение решает задачу повышения оперативности устройства за счет введения в устройство системы экстренного вызова. Это достигается путем введения в устройство по патенту РФ 1538178 в цикл запросов ТС кодограммы запроса аварийной ТС. Эта кодограмма повторяется в течение цикла запроса через равные промежутки времени, например, через одну секунду. В аппаратуру ТС вводится блок аварийного вызова, блок сравнения номеров и мультиплексор, на пункте контроля внедряется алгоритм опроса аварийного ТС и обработки аварийного вызова, выход блока аварийного вызова соединен с входом клавиатуры, с первым входом мультиплексора и с четвертым выходом блока сравнения номеров, первый, второй и третий входы которого подключены к одноименным выходам блока проверки старта, первый выход блока сравнения номеров соединен с первым входом блока управления и со сходом аварийного вызова, второй и третий и четвертый выходы блока сравнения номеров подключены соответственно к входу ЦАП, к входу формирователя сигнала запуска и к третьему входу мультиплексора, второй вход которого соединен с выходом формирователя кода маршрутного датчика, а выход - с первым входом блока кодирования. 1 з.п. ф-лы, 11 ил.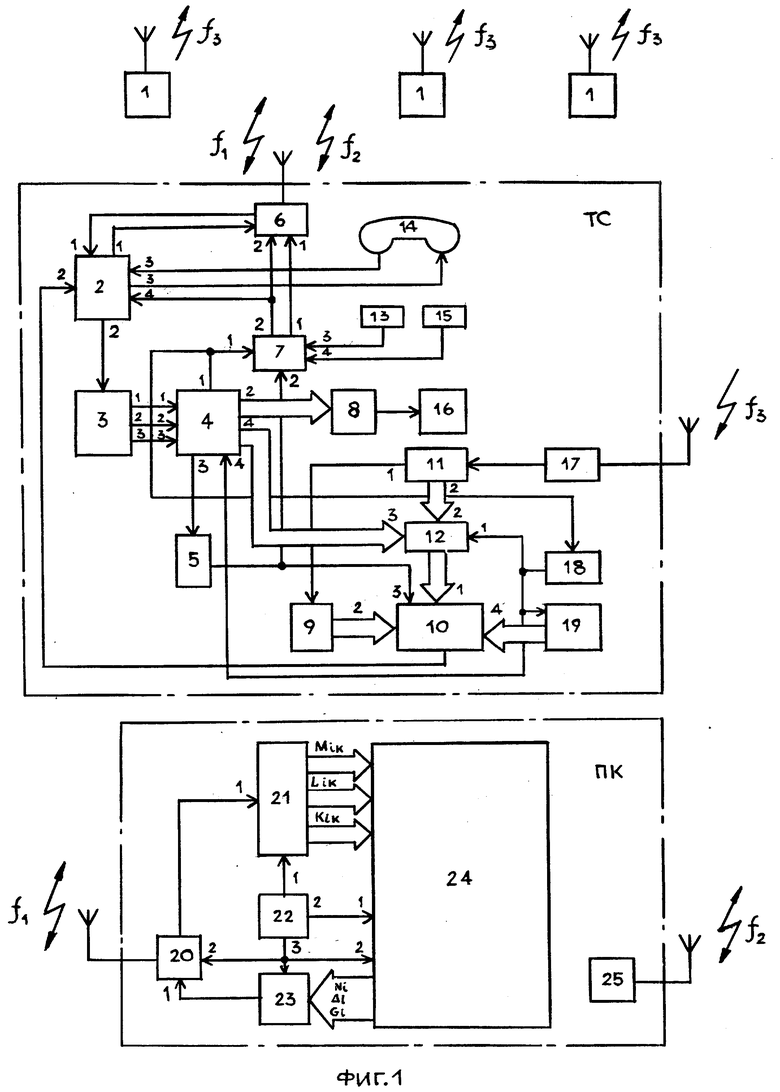
| SU, авторское свидетельство, 1538178, кл.G 08 G 1/123, 1990. |
