Изобретение относится к контролю движения транспортных средств (ТС) и может быть использовано, в частности в системах централизованного контроля ТС маршрутизированного транспорта.
Цель изобретения повышение информативности устройства. Цель изобретения достигается тем, что в устройство, содержащее на маршруте маршрутные датчики 1, на ТС коммутационный блок 2, блок 3 проверки старта, блок 4 сравнения номера ТС, формирователь 5 сигнала запуска, двухканальный приемодатчик 6, блок управления режимом приемодатчика 7, цифроаналоговый преобразователь 8, датчик 9 пройденного пути, тангенту 12, блок 15 кодирования, формирователь 14 кода маршрутного датчика, индикатор 13 отклонения от графика, приемник 17, клавиатуру 18, на пункте контроля приемопередатчик 20 первого канала, приемопередатчик 25 второго канала, блок 23 кодирования, блок 24 обработки информации, блок 22 согласования, преобразователь 21 последовательного кода в параллельный, введены на ТС усилитель 10. 1 низкой частоты кабины водителя с громкоговорителем 16, усилитель 10. 2 низкой частоты салона с группой громкоговорителей 19.1.19.n, микрофон 11, а также в устройство введены дополнительные функциональные связи коммутационного блока 2, блока 4 сравнения номера и приема информации и блока 7 управления режимом приемопередатчика.
В устройстве обеспечивается возможность передачи циркулярных сообщений с пункта контроля какой-либо группе транспортных средств, а также возможность контроля речевых сообщений водителя в салон транспортного средства, за счет чего повышается информативность устройства.
Изобретение относится к контролю движения транспортных средств (ТС) и может быть использовано, в частности в системах централизованного контроля маршрутизированного транспорта.
Целью изобретения является повышение информативности устройства.
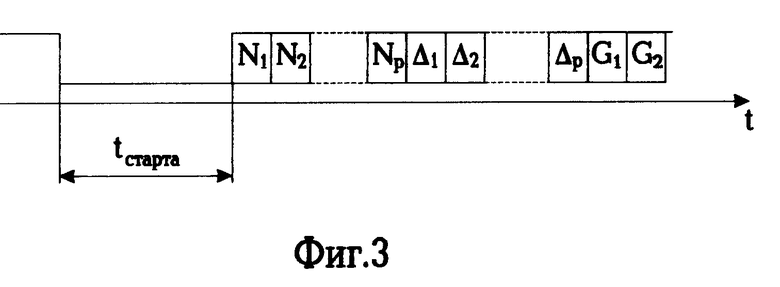
На фиг. 1 приведена блок схема устройства для контроля движения транспортных средств; на фиг. 2 функциональная схема блока кодирования пункта контроля; на фиг. 3 запросная кодограмма; на фиг. 4 функциональная схема блока проверки старта; на фиг.5 функциональная схема блока сравнения номера и приема информации; на фиг. 6 функциональная схема коммутационного блока; на фиг. 7 и на фиг. 8 блок-схема алгоритма программы, выполняемой блоком обработки информации; на фиг. 9 временные диаграммы на выходах блока согласования.
Устройство содержит ( фиг. 1) на маршрутах маршрутные датчики 1; на ТС коммутационный блок 2, блок 3 проверки старта, блок 4 сравнения номера и приема информации, формирователь 5 сигнала запуска, двухканальный приемопередатчик 6, блок 7 управления режимом приемопередатчика, цифроаналоговый преобразователь 8, датчик 9 пройденного пути, усилители 10.1 и 10.2 низкой частоты, микрофон 11, тангенту 12, индикатор 13 отклонения от графика, формирователь 14 кода маршрутного датчика, блок 15 кодирования, громкоговоритель 16 кабины водителя, приемник 17, клавиатуру 18 и громкоговорители 19.1 19.n салона; на пункте контроля приемопередатчик 20 первого канала, преобразователь 21 последовательного кода в параллельный, блок 22 согласования, блок 23 кодирования, блок 24 обработки информации и приемопередатчик 25 второго канала.
Блок 23 кодированного пункта контроля состоит из генератора 26 тактовых импульсов, элемента И 27, одновибратора 28, регистра 29 сдвига, модулятора 30 и задающего резистора 31.
Блок 3 проверки старта содержит генератор 32 импульсов, демодулятор 33, счетчик-делитель 34, триггер 35, счетчик-дешифратор 36 и счетчик 37.
Блок 4 сравнения номера и приема информации содержит регистр 38 сдвига, элемент НЕ 39, группу элементов ИСКЛЮЧАЮЩИЕ ИЛИ 40, двухминутное реле 41 времени, элемент ИЛИ-НЕ 42, двухразрядный D-триггер 43, параллельный регистр 44, группу переключателей 45 и задающий резистор 46.
Блок 7 управления режимом приемопередатчика представляет собой известный комбинационный логический автомат, входными переменными которого являются логические сигналы команды G1G2, тангенты, запуска, а выходными функциями сигналы управления: режим работы приемопередатчика (прием, передача), выбор канала (1 канал, 2 канал) коммутации выхода микрофона и входа УНЧ салона.
Коммутационный блок 2 содержит элемент НЕ 47 и ключи 48 52.
Блок 24 обработки информации может быть выполнен в виде микроЭВМ типа "Электроника-89".
Датчик 9 пройденного пути преобразует угловые перемещения вала тягового двигателя транспортного средства в код, корректируемый в ноль по сигналу маршрутного датчика 1.
Блок 15 кодирования по сигналу запуска преобразует параллельный двоичный код, формируемый блоками 9, 14 и 18, в последовательный код, подаваемый на второй вход коммутационного блока 2.
Формирователь 14 кода датчика преобразует в цифровой код частотно-модулированный сигнал i-го маршрутного датчика.
На блок-схеме алгоритма программы (фиг. 7 и 8) приняты следующие обозначения блоков:
1. Введение даты и времени.
2. Вызов мнемосхемы маршрута на экран дисплея.
3. Присвоение каждому отрезку маршрута двух определенных позиций на дисплее вдоль мнемосхемы маршрута: П1(L) для прямого движения; П2(L) для обратного.
4. Введение данных:
а) список кодов маршрутных датчиков в порядке от начала маршрута М1, М2, Мj, Mр;
б) удаление маршрутных датчиков от начала маршрута Q1, Q2, Qj, Qp;
в) введение графиков расписаний (функция местоположения транспортных средств от времени в виде таблицы соответствий).
5. Ввод начальных значений:
i 0; Gi 00; ПОНДi 0,
где
i 1-n порядковый номер транспортного средства,
ПОНДi признак определения направления движения i-ого транспортного средства;
Δi отклонение от графика i-ого транспортного средства;
Gi команда на борт транспортного средства.
6. Разрешение прерывание клавиатуры микроЭВМ, занесение в вектор прерывания от клавиатуры адреса подпрограммы обработки этих прерываний, занесение в вектор прерываний от алфавитно-цифрового печатающего устройства (АЦПУ), присвоение прерываний от АЦПУ наивысшего приоритета.
7. Ввод начального значения
K 1,
где
K номер цикла.
8. i 1.
9. Проверка B 17, где B значение сигнала с третьего выхода блока 22 согласования.
10. Вывод на выход блока 24 обработки информации (Ni, Δi Gi); где Ni номер транспортного средства.
11. Проверка A 1? где A значение сигнала с второго выхода блока 22 согласования.
12. Считывание принятой информации, поступившей на информационные входы блока 24 обработки информации, Mik, Lik, Kik, где 4 Mik код маршрутного датчика; Lik код перемещения ТС; Kik код сигнала блока 18.
13. Проверка ПОНДi 0?
14. W Qj Lik, где W абсолютное удаление транспортного средства от начала маршрута (НМ) в отрезках (дискретах) маршрута.
15. Символ ТС _→ П2 (L), соответствующую W.
16. Определение по известному местоположению из планируемого времени tплан.
17. Определения отклонения от графика: i tплан tтек, где tтек текущее время.
18. Достигло ли i-е ТС НМ?
19. ПОНД +1.
20. W Qj + Lik.
21. Символ ТС -L П1 (L), соответствующий W.
22. Определение по известному местоположению планируемого времени tплан.
23. Определение отклонятся от графика i tплан tтек.
24. Достигло ли i-е ТС КМ?
25. ПОНДi -1.
26. Вывод на дисплей сообщения, соответствующего коду K с символом i-того сообщения ТС.
27. Соответствует ли местоположение i-ого ТС расположению какой-либо контрольной точки.
28. tтек занести в массив графика исполненного движения i-ого ТС в столбец данной контрольной точки.
29. Определение jik для Mik, где j порядковый номер маркера в списке кодов маркеров.
30. Проверка K 1?
31. jik ji(k-1)?
32. Mik, Lik, Kik, tтек -L ОЗУ.
33. ПОНДi -1
34. ПОНДi +1
35. ОЗУ заполнено?
36. ОЗУ -L ВЗУ.
37. Резервирование массива для графика исполненного движения i-ого ТС.
38. i n?
39. K K 1
40. i i+1
Подпрограмма обработки прерываний от клавиатуры микроЭВМ.
41. Символы с клавиатуры -L Мсим (массив символов).
42. Команда вызова на телефон или команда контроля
43. Определение i.
44. Команда -L Gi.
45. Определение множества порядковых номеров ТС в цикле, указанных в списке команды циркулярного сообщения i1, i2, is.
46. Gi 10, где i i1, i2, is.
47. Выход из прерывания.
48. Команды циркулярного сообщения.
49. Команда на печать исполненного движения i-ого ТС?
50. Разрешение прерываний от АЦПУ, q 1, где q порядковый номер символа массива графика исполненного движения i-ого ТС. Подпрограмма обработки прерываний от АЦПУ микроЭВМ.
51. Вывод q-го символа массива графика исполненного движения i-го ТС.
52. Конец масства?
53. Запрещение прерываний от АЦПУ.
54. q q+1.
55. Выход из прерывания.
Устройство для контроля движения транспортных средств работает следующим образом.
Блок 22 согласования на своих выходах формирует сигналы (фиг. 9), обеспечивающие согласованную во времени работу блоков устройства. По сигналу с третьего выхода блока 22 согласования, поступающему на второй управляющий вход блока 24 обработки информации, на выходы последнего выводится информация для передачи в эфир, поступающая на группу информационных входов регистра 29 сдвига. По этому же сигналу открывается элемент И 27 для прохождения тактовых импульсов и запускается одновибратор 28, который формирует сигнал параллельный записи информации, поступившей на информационные входы первой группы регистра 29 сдвига. С выхода регистра 29 сдвига информация в последовательном коде (фиг. 3) поступает на вход модулятора 30. С выхода модулятора 30 сигнал поступает на вход приемопередатчика 20 первого канала, чем обеспечивается преобразование логических "0" и "1" в модулированные радиосигналы. Указанные сигналы, принятые двухканальным приемопередатчиком 6, через коммутационный блок 2 поступают на демодулятор 33 и преобразуются в последовательность логических "0" и "1". По приходу стартового импульса (фиг. 3) запросной кодограммы сигнал "0" разрешает работу счетчика-делителя 34. Коэффициент деления n выбирается по условию
где:
Tг период частоты следования импульса с генератора 32 импульсов;
tстар длительность стартового импульса запросной кодограммы.
Как только с демодулятора 33 приходит стартовый импульс, удовлетворяющий указанному условию, на выходе счетчика-делителя 34 появляется импульс, переключающий триггер 35 в нулевое состояние, чем разрешается работа счетчика-дешифратора 36 и счетчика 37.
Коэффициент счетчика-дешифратора 36 m выбирается по условию:
где
Fr частота генератора 32;
fm скорость передачи информации, бит/с.
Счетчик 37 подсчитывает количество бит информации после старта. Счетчик-дешифратор 36 формирует на своих выходах сигналы "1", соответствующие состоянию датчика. С выхода i1 снимается стробирующий сигнал, попадающий в середину бита. По окончании приема информации на выходе счетчика 37 появляется сигнал, обеспечивающий переключение триггера 35 в исходное состояние, т.е. перевод блока 3 проверки старта в исходное состояние.
На блок 4 сравнения номера и приема информации с блока 3 проверки старта поступают следующие сигналы: с входа демодулятора 33 кодограмма в последовательном коде, стробирующие импульсы с выхода i1 счетчика-дешифратора 36, сигнал окончания приема информации с выхода счетчика 37.
С первого выхода блока 3 проверки старта на информационный вход регистра 38 сдвига поступает информация в последовательном двоичном коде. Запись информации в регистр 38 сдвига начинается с первого бита кодограммы, следующего за стартом. Под действием стробирующих импульсов, приходящих с второго блока 3 проверки старта, регистр 38 сдвига заполняется информацией, передаваемой с пункта контроля (N, Δ G). Разряды регистра 38 сдвига, в которые попадает передаваемый номер, соединены каждый с первым входом соответствующего элемента 40 ИСКЛЮЧАЮЩЕЕ ИЛИ, вторые входы которых с помощью переключателя 45 подключены к шинам "0" или к "1" в зависимости от закодированного номера транспортного средства. На выходах всех элементов 40 ИСКЛЮЧАЮЩИЕ ИЛИ будут "0" только в том случае, если номер в запросной кодограмме совпадает с закодированным номером на транспортном средстве (закодированным с помощью переключателей 45). Тогда сигнал окончания приема информации с третьего выхода блока 3 проверки старта, пройдя через элемент НЕ 39, формирует стробирующий сигнал на выходе элемента ИЛИ-НЕ 42 для записи информации в двухразрядный D-тригер 43, в параллельный регистр 44 с регистра 38 сдвига и для запуска реле 41 (в случае совпадения номера ТС). Этим же сигналом аппаратура транспортного средства переводится в режим передачи информации. Выходы двухразрядного D-триггера 43, в котором после приема информации будет находится команда на борт ТС, подключены к блоку 7 управления режимом приемопередатчика, а первый разряд подключен также и к коммутационному блоку. Выходы параллельного регистра 44 соединены с входами цифроаналогового преобразователя 8.
При отсутствии команд пункта контроля (c d 0) двухканальный приемопередатчик 6 работает в режиме приема-передачи цифровой информации на первом канале и его первый вход и выход посредством коммутационного блока 2 подключается к выходу блока 15 кодирования и входу блока 3 проверки старта соответственно, а выход микрофона 11 при нажатой тангенте 12 подключается к входу УНЧ салона 10.2.
При получении с пункта контроля команды вызова на телефон коммутационный блок 2 обеспечивает подключение выхода микрофона 11 при нажатой тангенте 12 к первому входу двухканального приемопередатчика 6, а выход приемопередатчика 6 подключает к УНЧ кабины водителя. Блок 7 управления режимом приемопередатчика переключает приемопередатчик 6 на второй канал (прием-передача осуществляется под управлением тангенты 12).
Команда циркулярного сообщения воздействует на коммутационный блок 2 и блок 7 управления режимом приемопередатчика так, что приемопередатчик 6 переключается на второй канал, его выход подключается к УНЧ кабины водителя, а выход микрофона 11 при нажатой тангенте 12 подключается к УНЧ салона 10.2 ТС.
Команда контроля предназначена для осуществления контроля за тем, как объявляют остановки. Поэтому при получении аппаратурой ТС такой команды коммутационный блок 2 обеспечивает подключение выхода приемопередатчика 6 к УНЧ кабины водителя (для корректирующих замечаний проверяющего), а выход микрофона 11 при нажатой тангенте 12 подключается к выходу УНЧ салона ТС и к первому входу приемопередатчика 6 (прием-передача осуществляется под управлением тангенты 12).
Обработка поступающей на пункт контроля информации и формирование передаваемой на транспортное средство кодограммы осуществляется в соответствии со схемой алгоритма, представленной на фиг. 8 и 9.
После пуска программы блок 24 обработки информации (микроЭВМ) выполняет ряд подготовительных операций (1-8 блок-схемы алгоритма). Затем блоком 9 производится опрос готовности аппаратуры на пункте контроля к режиму запроса i-го транспортного средства. Флаг готовности выставляется блоком 22 согласования на втором выходе. При В=1 на выход блока 24 обработки информации поступают данные (Ni, Di Gi). С выхода блока 23 кодирования на вход приемопередатчика 20 первого канала приходит тональный сигнал частотного (фазового) модулятора. В это время аппаратура транспортного средства, работая в режиме приема информации, определяет сигнал старта и сравнивает номер в запросной кодограмме со своим номером. То транспортное средство, номер которого совпал с номером, посланным пунктом контроля, принимает кодограмму. В информации, принятой на транспортном средстве, содержаться данные об отклонении от графика и команда на борт ТС.
При работе устройства в первом цикле (K=1) отклонение и биты команды будут иметь нулевые значения ( Δ0, G=00, i=0-n). В соответствии с этим стрелка индикатора отклонения от графика установится в нейтральное положение
0. После приема информации аппаратура i-го транспортного средства переводится в режим передачи данных на пункт контроля. В это время аппаратура на пункте контроля находится в ожидании флага готовности на ввод информации в память микроЭВМ. После приема данных от i-го транспортного средства с выходов преобразователя 21 последовательного кода в параллельный принятые коды Mik, Lik, Kik поступают в блок 24 обработка информации. Эта информация проходит обработку согласно алгоритму программы, после чего опрашивается следующее транспортное средство. По принятым данным определяется местоположение всех транспортных средств на маршруте. По местоположению транспортного средства определяется из графиков-расписаний плановое время пребывания в данной точке маршрута (методом интерполяции по заданным контрольным точкам из графиков-расписаний). Затем, если местоположение транспортного средства соответствует расположению контрольной точки на маршруте, то tтек заносится в массив формирования исполнения движения i-го транспортного средства (блоки 27 и 28 схемы алгоритма). По плановому времени и текущему определяется отклонение от графика i-го транспортного средства. В дальнейшем эта информация, поступив на борт транспортного средства, индицируется на индикаторе отклонения от графиков.
Для речевой связи диспетчера с водителем на клавиатуре микроЭВМ набирается номер транспортного средства с кодом команды вызова на телефон. Совершается прерывание от клавиатуры и программа переходит по адресу начала подпрограммы обработки прерывания от клавиатуры. Подпрограммой по номеру транспортного средства определяется его номер в цикле i, а так как подана команда вызова на телефон, Gi присваивается значение вызова 01. Приняв эту информацию, аппаратура i-го транспортного средства срабатывает таким образом, что приемопередатчик 6 переходит на второй канал и включается реле 41 времени на 2 мин, выход микрофона 11 подключается к модуляционному входу приемопередатчика 6, выход которого подключается к входу УНЧ кабины водителя. Диспетчер голосом приглашает водителя на сеанс речевой связи. Речевая связь с диспетчером осуществляется через одноканальный приемопередатчик 25 второго канала. После сеанса связи аппаратура ТС до истечения двухминутной задержки, отсчитываемой реле 41, будет находится на втором канале. Когда инициатором сеанса связи является водитель, он посылает команду вызова на телефон с помощью клавиатуры 18 на транспортном средстве. Эта информация на пункте контроля будет преобразована а команду диспетчеру на экране дисплея микроЭВМ, после чего диспетчер проделывает описанные операции для осуществления речевой связи.
При подаче диспетчером с клавиатуры микроЭВМ команды контроля программой осуществляются аналогичные операции что и при команде вызова, Gi присваивается значение 11. Аппаратура ТС после принятия этой команды функционирует таким образом, что в течение 2 мин на пункте контроля будет слышно, как водитель объявляет остановки. Эти же сообщения будут слышать и пассажиры в салоне ТС. Так же водителю можно будет передавать речевые сообщения. После 2 мин аппаратура ТС переводится в режим приема запроса по первому каналу.
Команда циркулярного сообщения отличается от двух предыдущих тем, что в ней присутствует список номеров транспортных средств, которым необходимо передать какое-либо сообщение. Поэтому программой в начале определяется для каждого ТС, указанного в этой команде, номер в цикле. После этого значению Gi для ТС списка присваивается значение 10. Спустя некоторое время, необходимое для прохождения запросов на все ТС списка, аппаратура последних переключится на второй канал для принятия речевых сообщений с пункта контроля. Передача сообщений в этом случае от водителей на пункт контроля невозможна.
Для осуществления вывода графика исполненного движения 1-го транспортного средства на клавиатуре необходимо набрать его номер с символом печати графика. Подпрограмма обработки прерываний от клавиатуры определяет i транспортного средства и дает разрешение на прерывание от АЦПУ. Подпрограмма обработки прерываний от АЦПУ осуществляет вывод на АЦПУ графика исполненного движения. После окончания вывода производится запрещение прерываний от АЦПУ и аппаратура на пункте контроля возвращается в исходное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2096833C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
| Устройство для контроля движения транспортных средств | 1990 |
|
SU1836714A3 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| Устройство для контроля движения транспортных средств | 1989 |
|
SU1695352A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
| АВТОМАТИЗИРОВАННАЯ ДИСПЕТЧЕРСКАЯ СИСТЕМА КОНТРОЛЯ И УПРАВЛЕНИЯ ДОРОЖНЫМ ТРАНСПОРТОМ | 2005 |
|
RU2300808C2 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113013C1 |







Изобретение относится к контролю движения транспортных средств (ТС) и может быть использовано, в частности в системах централизованного контроля ТС маршрутизированного транспорта. Техническим результатом является повышение информативности устройства для контроля движения транспортных средств. Заявляемое устройство содержит на маршрутах - маршрутные датчики; на ТС - коммутационный блок, блок проверки старта, блок сравнения номера и приема информации, формирователь сигнала запуска, двухканальный приемопередатчик, блок управления режимов приемопередатчика, цифроаналоговый преобразователь, датчик пройденного пути, усилители низкой частоты и микрофон, тангенту, индикатор отклонения от графика, формирователь кода маршрутного датчика, блок кодирования, громкоговоритель кабины водителя, приемник, клавиатуру и громкоговорители салона; на пункте контроля - приемопередатчик первого канала, преобразователь последовательного кода в параллельный, блок согласования, блок кодирования, блок обработки информации и приемопередатчик второго канала. 1 з.п. ф-лы, 9 ил.
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
