Изобретение относится к области радиолокационной техники и может быть использовано в системах поиска космических и воздушных объектов.
Известен радиолокатор, описанный в книге Немец А.А. и др. "Основы радиолокации и телевидения" М., Высшая школа, 1984 г., стр. 2-7. Он может работать в непрерывном, квазинепрерывном режимах или в режиме с увеличенной частотой следования зондирующих импульсов. Радиолокатор состоит из передатчика, жестко связанных передающих и приемных антенн, вращаемых с помощью привода, приемника и индикатора. В приемнике осуществляется выделение сигнала от целей. Определение направления осуществляется на индикаторе с помощью датчика азимута. Однако радиолокатор неспособен самостоятельно определять дальность.
Известен радиолокатор, описанный в патенте N 2003133, авторы Часовской А.А., Янина Т.А.
В нем с помощью узлов, представляющих собой блок управления вращением антенны с двумя скоростями, осуществляется попеременное вращение жестко связанных между собой передающей и приемной антенн то с одной, то с другой скоростью от оборотов к обороту.
По командам с датчика азимутальных меток передатчик формирует непрерывный, квазинепрерывный или с увеличенной частотой следования импульсов сигнал, который излучается передающей антенной.
Отраженная от объектов электромагнитная энергия поступает в приемную антенну, имеющую равную с передающей антенной и одинаково направленную диаграмму направленности. В приемнике происходит преобразование электромагнитной энергии в электрические сигналы и выделение этих сигналов по характеристикам, присущим ожидаемым целям.
Сигналы преобразуются в код с помощью блока преобразования длительности огибающей в код.
Дальность определяется с помощью узлов, представляющих собой блок определения дальности, путем вычитания из длительности огибающей сигнала при одной скорости вращения антенн длительности огибающей сигнала при другой скорости вращения антенн.
При этом длительности огибающих подсчитываются с помощью следующих друг за другом азимутальных меток, количество которых не зависит от скорости вращения антенн. Однако точность определения дальности зависит от стабильности длительности огибающей сигнала, которая может измениться за время одного оборота антенн. Кроме того, разрешающая способность по направлению зависит от величины угрубленного азимута, состоящего из узлов, представляющих собой блоки определения угрубленного азимута. С помощью предлагаемого устройства увеличивается точность определения дальности и разрешающая способность по направлению.
Достигается это тем, что вводится вместо блока определения угрубленного азимута блок автосопровождения по направлению и вводится корректор дальности, состоящий:
из блока преобразования амплитуды огибающей в код, постоянного запоминающего устройства, оперативного запоминающего устройства, делителя и умножителя, при этом второй вход и выход блока автосопровождения по направлению соответственно соединены с выходом приемника и через первый вход корректора дальности с первым входом оперативного запоминающего устройства, имеющего второй вход и выход, соответственно соединенные через постоянное запоминающее устройство, через блок преобразования амплитуды огибающей в код, через второй вход корректора дальности с вышеупомянутым выходом приемника и с первым входом делителя, второй вход и выход которого соответственно соединены с выходом постоянного запоминающего устройства и с первым входом умножителя, имеющего второй вход и выход соответственно, соединенные через третий вход корректора дальности с выходом блока преобразования длительности огибающей в код и с третьим входом блока определения дальности.
На фиг. 1 и в тексте приняты следующие обозначения.
1 - передатчик;
2 - передающая антенна;
3 - приемная антенна;
4 - привод;
5 - блок управления вращением антенн с двумя скоростями;
6 - датчик азимутальных меток;
7 - приемник;
8 - корректор дальности;
9 - блок преобразования амплитуды огибающей в код;
10 - постоянное запоминающее устройство;
11 - делитель;
12 - оперативное запоминающее устройство;
13 - умножитель;
14 - блок автосопровождения по направлению;
15 - блок преобразования длительности огибающей в код;
16 - блок определения дальности;
17 - индикатор,
при этом выход передатчика 1 соединен с входом передающей антенны 2, жестко связанной с приемной антенной 3, с приводом 4 и датчиком азимутальных меток 6, выход которого соединен с первым входом блока автосопровождения по направлению 14, с первым входом блока определения дальности 16, с первым входом индикатора 17 и через блок управления вращением антенны с двумя скоростями 5 с входом привода 4, а выход приемной антенны 3 через приемник 7 соединен с входом блока преобразования длительности огибающей в код 15, соединенным также со вторым входом блока автосопровождения по направлению 14, имеющего выход, соединенный через первый вход корректора дальности 8 с первым входом оперативного запоминающего устройства 12, имеющего второй вход и выход, соответственно соединенные через постоянное запоминающее устройство 10, через блок преобразования амплитуды огибающей в код 9, через второй вход корректора дальности 8 с вышеупомянутым выходом приемника 7 и с первым входом делителя 11, второй вход и выход которого соответственно соединены с выходом постоянного запоминающего устройства 10 с первым входом умножителя 13, имеющего второй вход и выход, соответственно соединенные через третий вход корректора дальности 8 с выходом блока преобразования длительности огибающей в код 15 и с третьим входом блока определения дальности 16, имеющим второй вход, соединенный с вышеупомянутым выходом блока автосопровождения по направлению 14.
Работа устройства осуществляется следующим образом.
Блок управления вращением антенн с двумя скоростями 5 осуществляет попеременное вращение жестко связанных между собой передающей и приемной антенн 2 и 3 то с одной, то с другой скоростью от оборота к обороту по командам с датчика азимутальных меток 6. При этом, начиная с нулевого азимута, с выходов блока 5 попеременно выдаются разные напряжения на вход приводов 4.
Пример исполнения блока 5 представлен в описании аналога.
Передатчик 1 формирует непрерывные, квазинепрерывные или с увеличенной частотой следования сигналы, которые излучаются передающей антенной 2. Отраженная от объектов электромагнитная энергия поступает в приемную антенну 3, имеющую равную с передающей антенной и одинаково направленную диаграмму направленности.
В приемнике 7 происходит преобразование электромагнитной энергии в электрические сигналы и выделение огибающих этих сигналов по характеристикам, присущим ожидаемым целям. Далее сигналы преобразуются в код с помощью блока преобразования длительности огибающей в код 15. Предварительно огибающая сигналов с выхода приемника 7 поступает в корректор дальности 8, который осуществляет корректировку длительности огибающей перед поступлением ее в блок определения дальности 16. Последний определяет дальность методом вычитания длительностей огибающих сигналов.
При этом из длительности огибающих при одной скорости вращения антенн вычитаются длительности огибающей при другой скорости вращения антенн и абсолютное значение разности характеризует дальность. При этом длительности огибающих подсчитываются с помощью следующих друг за другом азимутных меток с датчика азимутальных меток 6, количество которых не зависит от скорости вращения антенн. Блок автосопровождения по направлению 14 выдает номер цели в блок определения дальности 16.
Пример исполнения блока определения дальности 16 представлен в материалах описания аналога (патент N 2003133). Блок автосопровождения по направлению 14, анализируя скорость целей и их азимутальные перемещения, осуществляет разделение их присваиванием им номеров и сопровождение по направлению. Он выполняет функцию блока вторичной обработки, представленного, например, в книге "Радиотехнические системы", Ю.М. Казаринов. М., Высшая школа, 1990 г., стр. 448-469. Корректировка длительности огибающих сигналов необходима для последующей их обработки в блоке определения дальности 16. Это объясняется тем, что дальность определяется за два облучения цели при разных скоростях вращения антенн. Поэтому из-за изменения отражательной способности цели характеристики огибающих сигналов могут изменяться.
При этом меняется и амплитуда огибающих. Работа корректора дальности 8 осуществляется следующим образом.
Блок преобразования амплитуды огибающей в код 9 осуществляет преобразование амплитуды огибающей в код. При изменении амплитуды огибающей изменяется и длительность огибающей, что вносит погрешность при определении дальности. Для устранения этой погрешности определяется нормированный коэффициент, на который умножается длительность огибающей. При этом каждой амплитуде огибающей присваивается определенный коэффициент. Коэффициенты по количеству амплитуд зашиваются в постоянное запоминающее устройство 10, на адресный вход которого подается код амплитуды огибающей с блока 9. В зависимости от величины амплитуды с постоянного запоминающего устройства 10 будет считываться соответствующий амплитуде коэффициент на первый вход делителя 11 и на запись в оперативное запоминающее устройство 12. К тому же факт поступления коэффициента в оперативное запоминающее устройство 12 является также и дачей команды на предварительное считывание по этому же адресу в делитель 11 ранее запомненной информации. Адрес же, по которому происходит считывание - запись коэффициента, поступает на адресный вход оперативного запоминающего устройства 12 с блока автосопровождения по направлению 14. Таким образом, в делителе происходит деление коэффициента, соответствующего текущей амплитуде огибающей, на коэффициент, соответствующий запомненной амплитуде огибающей, и результирующий коэффициент поступает на вход умножителя 13. Если амплитуды равны, то результирующий коэффициент будет равен 1. В остальных случаях он может быть больше или меньше единицы.
На другой вход умножителя 13 поступает код длительности огибающей с блока преобразования длительности огибающей в код 15. Так как амплитуда огибающей характеризует и длительность огибающей, то коэффициент с выхода умножителя 13 представляет собой корректирующий коэффициент для корректировки длительности огибающей, а следовательно, для корректировки дальности при изменении амплитуды огибающей. Это откорректированное значение длительности огибающей с выхода корректора дальности 8 поступает в блок определения дальности 16 для дальнейшей обработки. Информация, характеризующая дальность, с блока определения дальности 16 поступает в индикатор 17 для отображения по азимуту, соответствующему определенным меткам с датчика азимутальных меток 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 1995 |
|
RU2097787C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2279690C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| УСТРОЙСТВО ОБРАБОТКИ ЛОКАЦИОННЫХ СИГНАЛОВ | 2000 |
|
RU2193216C2 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1996 |
|
RU2119176C1 |
| ДАЛЬНОМЕР | 2006 |
|
RU2327106C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2009 |
|
RU2413241C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
Изобретение относится к радиолокации. Технический результат заключается в том, что радиолокатор увеличивает точность определения дальности и разрешающую способность по направлению благодаря тому, что вводятся вместо блока определения угрубленного азимута блок автосопровождения по направлению, корректор дальности, состоящий из блока преобразования амплитуды огибающей в код, постоянного запоминающего устройства, оперативного запоминающего устройства, делителя и умножителя, при этом второй и выход блока автосопровождения по направлению соответственно соединены с выходом приемника и через первый вход корректора дальности с первым входом оперативного запоминающего устройства, имеющего второй вход и выход, соответственно соединенные через постоянное запоминающее устройство, через блок преобразования амплитуды огибающей в код, через второй вход корректора дальности с вышеупомянутым выходом приемника и с первым входом делителя, второй вход и выход которого соответственно соединены с выходом постоянного запоминающего устройства и с первым входом делителя, второй вход и выход которого соответственно соединены с выходом постоянного запоминающего устройства и с первым входом умножителя, имеющего второй вход и выход соответственно, соединенные через третий вход корректора дальности с выходом блока преобразования длительности огибающей в код и с третьим входом блока определения дальности. 1 ил.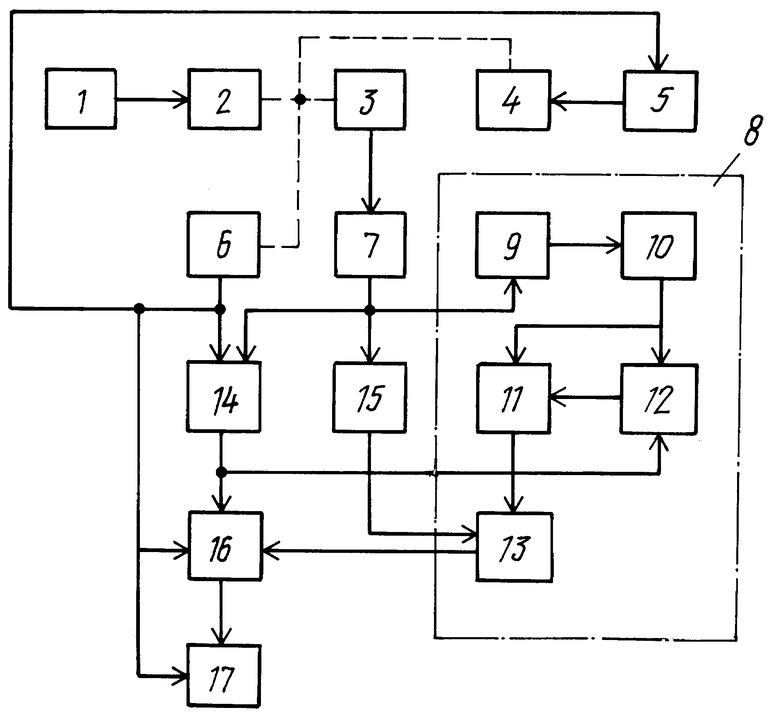
Радиолокатор, состоящий из передатчика, передающей антенны, приемной антенны, привода, блока управления вращением антенны с двумя скоростями, датчика азимутальных меток, приемника, блока определения дальности и индикатора, где выход передатчика соединен с входом передающей антенны, жестко связанной с приемной антенной, с приводом и датчиком азимутальных меток, выход которого соединен с первым входом блока определения дальности, с первым входом индикатора, с входом блока управления вращением антенны с двумя скоростями, выход которого соединен с входом привода, а выход приемной антенны через приемник соединен с входом блока преобразования длительности огибающей в код, отличающийся тем, что вводятся блок автосопровождения по направлению и корректор дальности, состоящий из блока преобразования амплитуды огибающей в код, постоянного запоминающего устройства, оперативного запоминающего устройства, делителя, умножителя, при этом первый вход, второй вход и выход блока автосопровождения по направлению соответственно соединены с выходом датчика азимутальных меток, с выходом приемника, вторым входом блока определения дальности и через первый вход корректора дальности с первым входом оперативного запоминающего устройства, второй вход которого соединен с постоянным запоминающим устройством, на адресный вход которого подается код амплитуды огибающей с блока преобразования амплитуды огибающей в код, на который поступает огибающая сигналов с приемника через второй вход корректора дальности, а выход постоянного запоминающего устройства соединен с первым входом делителя, второй вход и выход которого соответственно соединены с выходом оперативного запоминающего устройства и с первым входом умножителя, имеющего второй вход и выход, соответственно соединенные через третий вход корректора дальности с выходом блока преобразования длительности огибающей в код и с третьим входом блока определения дальности, с которого информация, характеризующая дальность, поступает в индикатор.
| RU 2003133 C1, 15.11.1993 | |||
| RU 2071081 C1, 27.12.1996 | |||
| РАДИОЛОКАТОР | 1992 |
|
RU2073883C1 |
| US 4456911 A, 26.06.1984 | |||
| 1973 |
|
SU425141A1 | |
