Изобретение относится к области радиолокации и может быть использовано для поиска объектов.
Известно устройство определения дальности, входящее в состав Радиолокатора, изложенного в патенте №2161806, автор Часовской А.А. В нем с помощью передатчика одночастотного немодулированного непрерывного сигнала осуществляется формирование электромагнитной энергии, поступающей в передающую антенну, излучающую ее в пространство. Антенны вращаются в режиме кругового обзора с помощью привода. Отраженная от объекта электромагнитная энергия поступает в приемную антенну, жестко связанную с передающей, и далее в приемник, выделяющий сигнал, характерный для движущегося воздушного объекта. Дальность определяется как разность длительностей сигналов от объекта за время, равное двум оборотам антенн, вращающихся с разными скоростями.
Известно устройство определения дальности, заявленное как устройство обработки радиолокационных сигналов, изложенное автором в патенте №2096798. В нем используются те же приемо-передающие узлы, что и в вышеупомянутом аналоге. Однако дальность определяется за время одного вращения антенны. Кроме того, точность ухудшается при изменении отражательной способности, и для обеспечения полного приема сигнала поля зрения приемной антенны должно быть более чем передающей, что уменьшает и дальность обнаружения объекта.
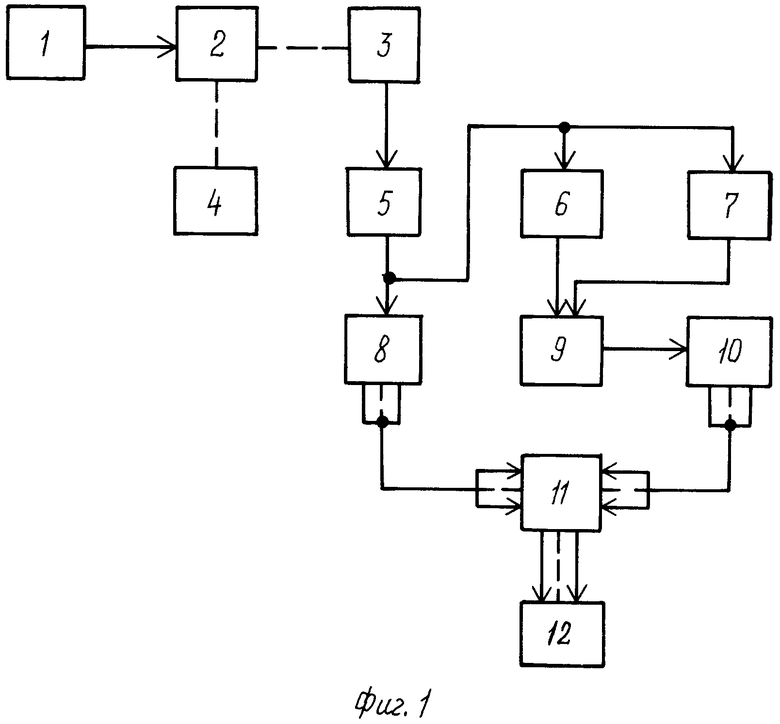
С помощью предлагаемого устройства увеличивается дальность обнаружения при увеличении точности измерения. Достигается это введением инвертора, линии задержки, блока определения амплитуды огибающей, элемента совпадения, преобразователя амплитуды в код и блока деления запомненной информации на текущую, при этом выход приемника соединен через инвертор с первым входом элемента совпадения и через линию задержки со вторым входом элемента совпадения, имеющего выход, соединенный с входом преобразователя амплитуды в код, имеющего группу выходов, соединенную с первой группой входов блока деления запомненной информации на текущую, имеющего группу выходов и вторую группу входов, соответственно соединенную с группой входов индикатора и с группой выходов блока определения амплитуды огибающей, имеющего вход, соединенный с вышеупомянутым выходом приемника.
На фиг.1 и в тексте приняты следующие обозначения:
1 - передатчик одночастотного немодулированного непрерывного сигнала;
2 - передающая антенна;
3 - приемная антенна;
4 - привод;
5 - приемник;
6 - инвертор;
7 - линия задержки;
8 - блок определения амплитуды огибающей;
9 - элемент совпадения;
10 - преобразователь амплитуды в код;
11 - блок вычитания запомненной информации на текущую;
12 - индикатор,
при этом выход передатчика одночастотного немодулированного непрерывного сигнала 1 соединен с входом передающей антенны 2, жестко связанной с приводом 4 и с приемной антенной 3, имеющей выход, соединенный с входом приемника 5, имеющего выход, соединенный через инвертор 6 с первым входом элемента совпадения 9 и через линию задержки 7 со вторым входом элемента совпадения 9, имеющего выход, соединенный с входом преобразователя амплитуды в код 10, имеющего группу выходов, соединенную с первой группой входов блока делителей запомненной информации на текущую 11, имеющего группу выходов и вторую группу входов, соответственно соединенные с группой входов индикатора 12 и с группой выхода блока определения амплитуды огибающей 8, вход которого соединен с вышеупомянутым выходом приемника 5.
Работа устройства осуществляется следующим образом.
С помощью передатчика одночастотного немодулированного непрерывного сигнала 1 осуществляется формирование электромагнитной энергии, поступающей в передающую антенну 2, излучающую ее в пространство. Антенна вращается в режиме кругового обзора с помощью привода 4. Отраженная от объекта электромагнитная энергия поступает в приемную антенну 3, жестко связанную с передающей антенной 2 и имеющую равное с ней поле зрения, и далее энергия поступает в приемник 5, преобразующий электромагнитную энергию в электрическую и выдающий сигнал от движущегося воздушного объекта.
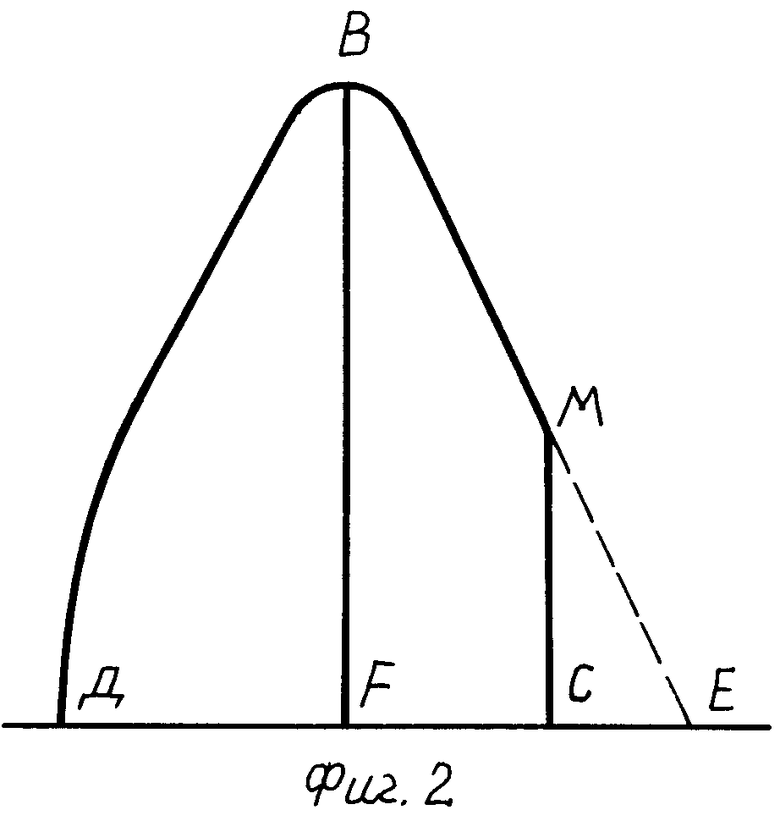
Для пояснения воспользуемся фиг.2, где представлена форма суммарной огибающей ДВМ. Если бы сигнал полностью был принят в процессе вращения, то диаграмма имела бы вид кривой ДВЕ. Отрезок МС показан пунктиром. Но фактически к приходу отраженного сигнала приемная антенна повернется на некоторый угол, пропорциональный дальности до объекта. Кроме того, сигнал полностью не будет принят и диаграмма заканчивается в точке М. Поэтому, чем больше дальность до объекта, тем более будет амплитуда МС. Следовательно, разность амплитуды BF, характеризующей максимум огибающей к амплитуде МС, характеризует дальность до объекта независимо от места расположения объекта в зоне диаграммы. Смещение же амплитуды суммарной диаграммы направленности не влияет на ее величину. Выделение амплитуды МС в конце диаграммы направленности происходит при одновременной подаче на первый и второй входы элемента совпадения 9 сигнала с приемника 5 через инвертор 6 и сигнала с этого приемника через линию задержки 7. При этом длительность сигнала зависит от величины линии задержки; порог срабатывания инвертора можно регулировать. Это увеличит помехозащищенность. С выхода приемника 5 сигнал также поступает в блок определения амплитуды огибающей 8, определяющий максимальную амплитуду огибающей и выдающий информацию об этой амплитуде на вторую группу входов блока деления запомненной информации на текущую 11, где она запоминается. Сигнал же с выхода элемента совпадения 9 поступает в преобразователь амплитуды в код 10, где амплитуда преобразуется в код, который далее поступает на первый вход вышеупомянутого блока 11, где на него делится запомненный код амплитуды огибающей. В результате частное от деления, характеризующее дальность, поступает в индикатор 12 для отображения.
Пример конкретного исполнения блока определения амплитуды огибающей представлен в книге «Радиотехнические системы» Ю.М.Казаринова, 1990, М., Высшая школа, стр.383, а пример исполнения блока деления запомненной информации на текущую 11 представлен в книге И.А.Орлова и В.Ф.Корнюшко «Основы вычислительной техники и организация вычислительных работ», М., Энергоатомиздат, 1984, стр.136, где отмечено, что перед осуществлением арифметической операции в арифметическом блоке, в частности делителе, может осуществляться предварительное запоминание первой информации.
Предлагаемое устройство может быть использовано для поиска удаленных воздушных и космических объектов. Диаграмма направленности может быть удлинена по углу места или иметь форму луча. Тогда антенны могут вращаться и по спирали. Информация о дальности может быть использована для вторичной обработки, что увеличивает точностные характеристики. При использовании в приемнике доплеровской обработки может быть осуществлено одновременное определение дальности до объектов, имеющих разные радиальные скорости.
Приведем пример конкретного выполнения. Пусть антенны вращаются со скоростью 10 об/мин. Тогда при ширине диаграммы направленности по азимуту в 1° время пересечения объекта может составлять 18 мс. Точность определения дальности зависит от влияния местных предметов, отличия диаграмм и от погрешности при обработке сигнала. При прочих равных условиях она может составлять 500 м. Выполняя условие о необходимости определения максимума огибающей, максимальная дальность обнаружения не должна превышать 1200 км.
Устройство наиболее эффективно можно использовать и для выдачи координат другим системам сопровождения, имеющим меньшую дальность обнаружения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2011 |
|
RU2460084C1 |
| РАДИОЛОКАТОР | 1998 |
|
RU2161806C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ВЫСОТЫ | 1999 |
|
RU2168739C1 |
| РАДИОЛОКАТОР | 1995 |
|
RU2096806C1 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
Изобретение относится к области радиолокации и может быть использовано для поиска объектов. Достигаемым техническим результатом является увеличение дальности обнаружения и точности измерения. Указанный результат достигается за счет того, что заявленное устройство содержит передатчик, передающую антенну, привод, приемную антенну, приемник, индикатор, инвертор, линию задержки, блок определения амплитуды огибающей, элемент совпадения, преобразователь амплитуды в код, блок деления запомненной информации на текущую, определенным образом соединенные между собой. 2 ил.
Устройство определения дальности, состоящее из передатчика одночастотного немодулированного непрерывного сигнала, передающей антенны, привода, приемной антенны, приемника и индикатора, при этом выход передатчика одночастотного немодулированного непрерывного сигнала соединен с входом передающей антенны, жестко связанной с приводом и приемной антенной, имеющей выход, соединенный с входом приемника, отличающееся тем, что введены инвертор, линия задержки, блок определения амплитуды огибающей, элемент совпадения, преобразователь амплитуды в код и блок деления запомненной информации на текущую, при этом выход приемника соединен через инвертор с первым входом элемента совпадения и через линию задержки со вторым входом элемента совпадения, имеющего выход, соединенный с входом преобразователя амплитуды в код, имеющего группу выходов, соединенную с первой группой входов блока деления запомненной информации на текущую, имеющего группу выходов и вторую группу входов соответственно соединенные с группой входов индикатора и с группой выходов блока определения амплитуды огибающей, вход которого соединен с вышеупомянутым выходом приемника.
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1996 |
|
RU2096798C1 |
| RU 2007133069 A, 10.03.2009 | |||
| RU 99116825 A, 27.01.2001 | |||
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 2005 |
|
RU2298807C2 |
| US 6111536 A, 29.08.2000 | |||
| US 4905009 A, 27.02.1990 | |||
| US 2005225481 A1, 13.10.2005. | |||

