Изобретение относится к области радиолокации и может быть использовано в системах поиска и слежения за воздушными объектами.
Известно устройство обработки радиолокационных сигналов, изложенное в кн.: «Радиотехнические системы» Ю.М.Казаринов, 1991, Москва, стр.383. В нем с помощью анализа максимума огибающей осуществляется определение направления на объект при использовании одноканального приемника с вращающейся диаграммой направленности. Однако при увеличении скорости обзора может быть принято два или один сигнал, который может быть и удлиненный. При этом точность определения направления уменьшается.
Известно устройство обработки радиолокационных сигналов, изложенное в патенте №2247408, заявка №2003122991/09. В нем может осуществляться обработка информации при вращении совмещенных передающей и приемной диаграмм направленности. При этом с выхода приемника выделенные сигналы поступают в блок преобразования амплитуды в код, откуда код поступает на вторую группу входов вычитателя и через блок параллельных линий задержек на первую группу входов этого вычитателя. Величина каждой линии задержки равна, например, максимальному времени запаздывания отраженного сигнала или времени, равному определенной длительности удлиненного сигнала, если он одиночный. Разность от вычитания кодов амплитуд характеризует угловое положение объекта, которое в дальнейшем складывается с текущим значением кода азимута с датчика азимута в сумматоре и истинное значение направления на объект поступает в блок вторичной обработки, осуществляющий построение траектории движения объектов. Код азимута также поступает на первую группу входов блока вторичной обработки для его использования при наличии других устройств, в частности датчика дальности, код дальности от которого также может поступать в этот блок. Однако точность определения направления зависит от дальности, так как в момент приема сигнала, отраженного от объекта, вращающаяся диаграмма направленности повернется на некоторый угол, что внесет погрешность измерения направления, так как изменится усиление сигнала в связи с нелинейностью диаграммы направленности приемника.
С помощью предлагаемого устройства увеличивается точность определения направления. Достигается это благодаря введению постоянного запоминающего устройства, делителя, дешифратора целого числа и одноадресного постоянного запоминающего устройства.
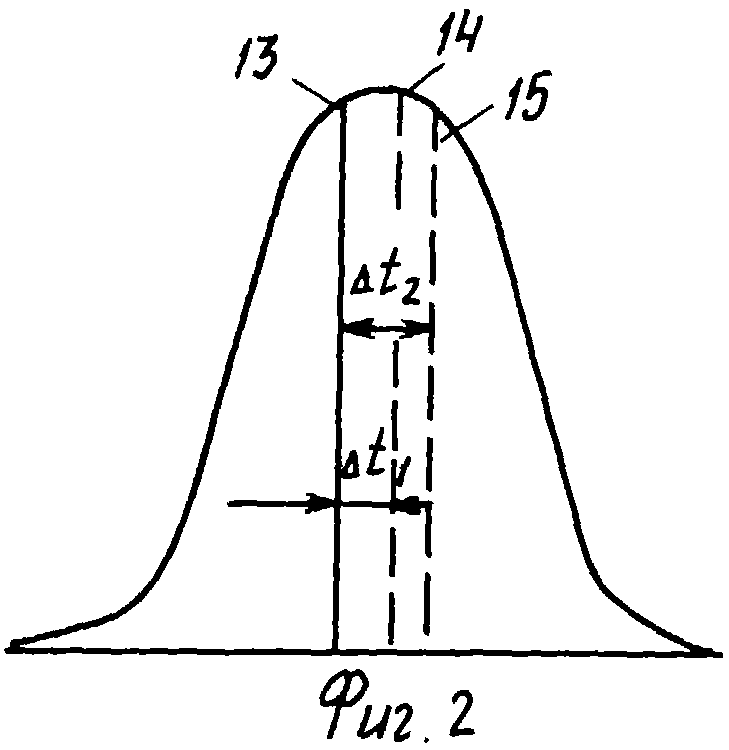
На фиг.1 и в тексте приняты следующие обозначения.
1 - приемник с вращающейся диаграммой направленности;
2 - датчик азимута;
3 - блок преобразования амплитуды в код;
4 - блок параллельных линий задержек;
5 - вычитатель;
6 - дешифратор целого числа;
7 - постоянное запоминающее устройство;
8 - делитель;
9 - сумматор;
10 - одноадресное постоянное запоминающее устройство;
11 - блок вторичной обработки;
12 - датчик дальности,
при этом выход приемника с вращающейся диаграммой направленности 1 соединен с входом блока преобразования амплитуды в код 3, имеющего группу выходов, соединенную с второй группой входов вычитателя 5 и через блок параллельных линий задержек 4 соединенную с первой группой входов вычитателя 5, а группа выходов датчика азимута 2 соединена с первой группой входов сумматора 9, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки 11, имеющего вторую и третью группу входов, соответственно соединенные с группой выходов датчика азимута 2 и с группой входов датчика дальности 12, к тому же группа выходов вычитателя 5 соединена с первой группой входов постоянного запоминающего устройства 7, имеющего группу выходов и вторую группу входов, соответственно соединенных с второй группой входов сумматора 9 и через дешифратор целого числа 6 с группой выходов делителя 8, первая и вторая группа входов которого соответственно соединены с группой выходов датчика дальности 12 и с группой выходов одноадресного постоянного запоминающего устройства 10.
Работа устройства осуществляется следующим образом.
В приемнике с вращающейся диаграммой направленности 1 осуществляется преобразование электромагнитных сигналов в электрические и выделение их по своим характеристикам. При этом передающая и приемная диаграммы направленности совмещены. Выделенные сигналы поступают в блок преобразования амплитуды в код 3, откуда код поступает на вторую группу входов вычитателя 5 и через блок параллельных линий задержек 4 на первую группу входов этого вычитателя. Величина каждой линии задержки равна максимальному времени запаздывания отраженного сигнала или времени, равному определенной длительности удлиненного сигнала, если он одиночный, а количество линий задержек равно величине разрядов параллельного кода. Разность от вычитания кодов амплитуд, характеризующая неуточненное направление на объект в зоне приемной диаграммы направленности, поступает на первый адресный вход постоянного запоминающего устройства 7. Одновременно на второй адресный вход поступает угрубленная информация о дальности до объекта с дешифратора целого числа 6, в виде информацию только целого числа.
Угрубление осуществляется путем деления в делителе 8 кода дальности с датчика дальности 12 на число, зашитое в одноадресном постоянном запоминающем устройстве 10. Первый и второй адресные входы постоянного запоминающего устройства 7 служат для выбора адреса, с которого считывается уточненная информация о направлении в зоне приемной диаграммы направленности, которая заранее зашивается в процессе настройки для всех значений дальностей. Отличие уточненного направления от углубленного объясняется тем, что к моменту прихода отраженного от объекта сигнала диаграмма направленности повернется на некоторый угол, при котором усиление сигнала изменится из-за нелинейности этой диаграммы. Уточненное угловое положение объекта в поле зрения приемника с вращающейся диаграммой направленности 1 с выхода постоянного запоминающего устройства 7 поступает в виде кода в сумматор 9, где складывает с текущим положением кода азимута с датчика азимута 2 и истинное положение направления на объект поступает в блок вторичной обработки 11, осуществляющий построение траектории движения объектов. Исполнение датчика азимута, выдающего информацию в виде кода, представлено в вышеупомянутом источнике на стр. 414. В блок вторичной обработки 11 также поступает информация о дальности с датчика дальности.
Исполнение датчика дальности, который может представлять собой преобразователь дальности, представлен, например, в кн.: Васин В.В., Степанов Б.Н. «Справочник-задачник по радиолокации», 1977, стр.214.
Для пояснения уточнения направления воспользуемся фиг.2, где показана огибающая и приняты следующие обозначения:
13 - момент излучения сигнала в направлении двух объектов, находящихся на одинаковом направлении;
14 - момент прихода сигнала от ближнего объекта;
15 - момент прихода сигнала от дальнего объекта.
Как видно из фиг.2, временные рассогласования Δt1 и Δt2 зависят от дальности. Таким образом, при известном значении грубого направления с вычитателя 5 и дальности с дешифратора определяются адреса в постоянном запоминающем устройстве 7, куда зашиваются соответствующие уточненные направления в виде информации, которая имела бы место в вычитателе 5, если бы между моментами излучения и приема сигналов приемная диаграмма направленности не вращалась. Точность определения направления зависит от флюктуации сигналов и может составлять значение, равное 0,03-0,05 от ширины приемной диаграммы. Увеличение точности определения времени обзора улучшает качество построения траекторий быстросмещающихся объектов.
Устройство можно использовать в радиолокаторах с вращающимися диаграммами направленности.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР | 1993 |
|
RU2088950C1 |
| РАДИОЛОКАТОР | 2007 |
|
RU2337377C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2012 |
|
RU2479850C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ | 2010 |
|
RU2421749C1 |
| РАДИОЛОКАТОР | 2008 |
|
RU2366970C1 |
| РАДИОЛОКАТОР | 1999 |
|
RU2161807C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ | 1997 |
|
RU2115139C1 |
| УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ | 2003 |
|
RU2232401C1 |
| РАДИОЛОКАТОР | 1998 |
|
RU2161806C2 |
Изобретение относится к области радиолокации и может быть использовано в системах поиска и слежения за воздушными объектами. Сущность изобретения заключается в том, что устройство обработки радиолокационных сигналов увеличивает точность определения направления благодаря введенным постоянному запоминающему устройству, делителю, дешифратору целого числа и одноадресному постоянному запоминающему устройству, соединенным определенным образом. Достигаемым техническим результатом является увеличение точности определения направления сигнала на объект слежения. 2 ил.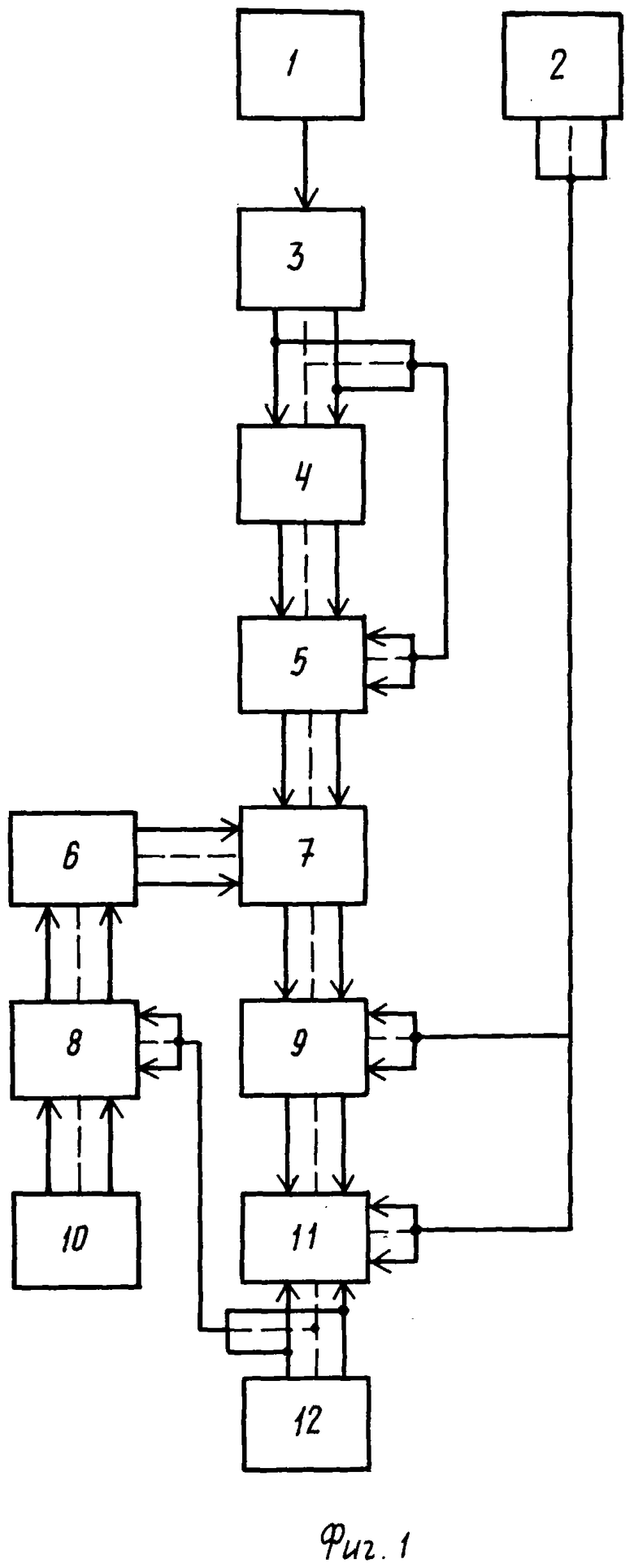
Устройство обработки радиолокационных сигналов, состоящее из приемника с вращающейся диаграммой направленности, датчика азимута, блока преобразования амплитуды в код, вычитателя, блока параллельных линий задержек, сумматора, блока вторичной обработки и датчика дальности, при этом выход приемника с вращающейся диаграммой направленности соединен с входом блока преобразования амплитуды в код, имеющего группу выходов, соединенную с второй группой входов вычитателя и через блок параллельных линий задержек соединенную с первой группой входов вычитателя, а группа выходов датчика азимута соединена с первой группой входов сумматора, имеющего группу выходов, соединенную с первой группой входов блока вторичной обработки, имеющего вторую и третью группы входов, соответственно соединенные с вышеупомянутой группой выходов датчика азимута и с группой выходов датчика дальности, отличающееся тем, что введены постоянное запоминающее устройство, делитель, дешифратор целого числа и одноадресное постоянное запоминающее устройство, при этом группа выходов вычитателя соединена с первой группой входов постоянного запоминающего устройства, имеющего группу выходов и вторую группу входов, соответственно соединенные с второй группой входов сумматора и через дешифратор целого числа с группой выходов делителя, первая и вторая группы входов которого соответственно соединены с группой выходов датчика дальности и с группой выходов одноадресного постоянного запоминающего устройства.
| УСТРОЙСТВО ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2003 |
|
RU2247408C1 |
| RU 99102923 A, 27.01.2001 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "АКУЛА С ПОМИДОРАМИ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2341994C1 |
| US 6243037 A, 05.06.2001 | |||
| Шкаф для охлаждения продуктов на горизонтальных сплошных подложках | 1983 |
|
SU1186908A1 |

