Изобретение относится к весоизмерительной технике, в частности к автомобильным и товарным весам.
Известно весоизмерительное устройство с компенсацией влияния вибрации [1] содержащее грузоприемную платформу, первый датчик, устройство нагружения, передающее силовое воздействие от грузоприемной платформы через устройство нагружения на первый датчик, блок обработки, схему корректировки и второй вспомогательный датчик, установленный рядом с первым датчиком и воспринимающим влияние вибрации пола.
Весоизмерительное устройство работает следующим образом.
Выходной сигнал первого датчика, включающий в себя сигнал постоянного тока и сигнал помехи, связанный с влиянием вибрации пола, поступает на вход схемы корректировки, на другой вход которой поступает сигнал второго вспомогательного датчика, содержащий частоту вибрации пола. Далее с помощью схемы корректировки производится вычитание корректирующего сигнала из выходного сигнала первого датчика.
Полученный таким образом рабочий сигнал поступает на вход блока обработки для последующей обработки.
Недостатком данного весоизмерительного устройства является неполная компенсация сигналов помех, воздействующих в целом на грузоприемную платформу; запитка датчиков постоянным током снижает чувствительность и точность весоизмерительного устройства.
Известны весы (см. авт. св. N 1559255, кл. G 01 G 9/00), содержащие аналого-цифровой преобразователь (АЦП), грузоприемную платформу, датчик и устройство нагружения, передающие силовое воздействие от грузоприемной платформы через устройство нагружения на датчик, схему корректировки и блок обработки.
Весы работают следующим образом.
При установке контрольного груза (наибольший предел взвешивания) АЦП устанавливает точное значение (масштаб) и затем устанавливается другим контрольным грузом (наименьший предел взвешивания) нуль АЦП, после чего разгружают грузоприемную платформу, при этом будут показания больше нуля. Схема корректировки за счет изменения питания датчика устанавливает с помощью блока обработки нулевое значение показаний.
В дальнейшем весы взвешивают вес, который устанавливается на грузоприемную платформу, с учетом скорректированного нуля и масштаба.
Недостатком данных весов являются отсутствие компенсации помех, воздействующих в целом на грузоприемную платформу; запитка датчика постоянным током, снижающая чувствительность весов и их точность.
Наиболее близким по технической сущности к предлагаемому изобретению являются электронные весы [2] содержащие микроЭВМ, входы и выходы которой подключены через порты ввода и вывода к выходам аналого-цифрового преобразователя, фильтр низкой частоты, грузоприемную платформу, тензометрический датчик, первый и второй входы моста соединены с первым и вторым выходами генератора синусоидального сигнала, а измерительная диагональ моста тензометрического датчика подключена через измерительный трансформатор к выходам измерительного усилителя, выход которого соединен с первым входом фазового детектора, второй вход которого подключен к третьему выходу генератора синусоидального сигнала.
Электронные весы работают следующим образом.
При нагружении грузоприемной платформы через устройство нагружения значение веса передается на тензометрический датчик, первый и второй входы моста тензометрического датчика с первым и вторым выходами генератора синусоидального сигнала, а измерительная диагональ моста тензометрического датчика подключается через измерительный трансформатор к входам измерительного усилителя и далее на вход фазового детектора. После детектирования фильтром низкой частоты (цифровой фильтр) выделяется значение несущей, которая поступает на вход аналого-цифрового преобразователя. Аналого-цифровой преобразователь полученные значения несущей через порты ввода-вывода передает в микроЭВМ (запоминающее устройство). При обработке используются выборки для получения сигнала, пропорционального среднему значению обрабатываемых величин.
С фильтром связано устройство, позволяющее вручную устанавливать требуемый уровень фильтрации. Измеренное значение массы отображается на индикаторе весов.
Недостатком данных электронных весов является отсутствие компенсационных помех, воздействующих в целом на грузоприемную платформу и датчик.
Целью изобретения является повышение точности электронных весов.
Цель достигается тем, что электронные весы содержат микроЭВМ, входы и выходы которой подключены через порты ввода-вывода к выходам аналого-цифрового преобразователя, грузоприемную платформу, тензометрический датчик и устройство нагружения, передающее силовое воздействие от грузоприемной платформы через устройство нагружения на тензометрический датчик, первый и второй входы моста тензометрического датчика соединены с первым и вторым выходами генератора синусоидального сигнала, а измерительная диагональ моста тензометрического датчика подключена через измерительный трансформатор к входам измерительного усилителя, выход которого соединен с первым входом фазового детектора, второй вход которого подключен к третьему выходу генератора синусоидального сигнала, повторитель, делитель напряжения, фильтр высоких частот, дифференциальный усилитель, интегратор, соединенные последовательно, при этом выход фазового детектора подключен на вход повторителя и к второму входу дифференциального усилителя, выход же интегратора подключен на вход аналого-цифрового преобразователя.
Для доказательства соответствия предложенного технического решения критерию "существенные отличия" определим, в каких технических решениях имеются признаки, сходные с признаками, отличающими заявляемое техническое решение от прототипа. Отличительными признаками предложенных электронных весов являются повторитель, делитель напряжения, фильтр верхних частот, дифференциальный усилитель, интегратор.
Перечисленные устройства широко применяются в технических решениях по прямому назначению (см. Гутнинов В.С. Интегральная электроника в измерительных устройствах. Л. Энергия, 1980). Соединение последовательно выхода фазового детектора и инвертирующего входа дифференциального усилителя, а также соединение последовательно выхода фазового детектора, повторителя, делителя напряжения, фильтра верхних частот и неинвертирующего входа дифференциального усилителя позволяет полученные соответствующие сигналы на входах дифференциального усилителя с высоким быстродействием суммировать. Использование фазового детектора по прямому назначению позволяет детектировать сигналы с очень минимальными уровнями измерения информационного сигнала (см. Хоровиц. Хилл. У. Искусство схемотехники. М.Мир, 1984, т.2, с.383).
Применение интегратора с подключением на вход аналого-цифрового преобразователя позволяет убрать пульсации и шумы на входе аналого-цифрового преобразователя, сохранив высокое быстродействие.
Перечисленные взаимосвязи позволяют повысить точность электронных весов за счет выделения сигнала путем детектирования и компенсации сигнала помехи, превышающей частоту рабочего сигнала, используя высокое быстродействие, предложенных взаимосвязей также за счет алгоритма обработки на микроЭВМ позволяет использовать выделение сигналов по алгоритмам более сложным, чем простое усредненное значение. Наличие таких новых свойств позволяет сделать вывод о том, что предложенное техническое решение обладает существенными отличиями.
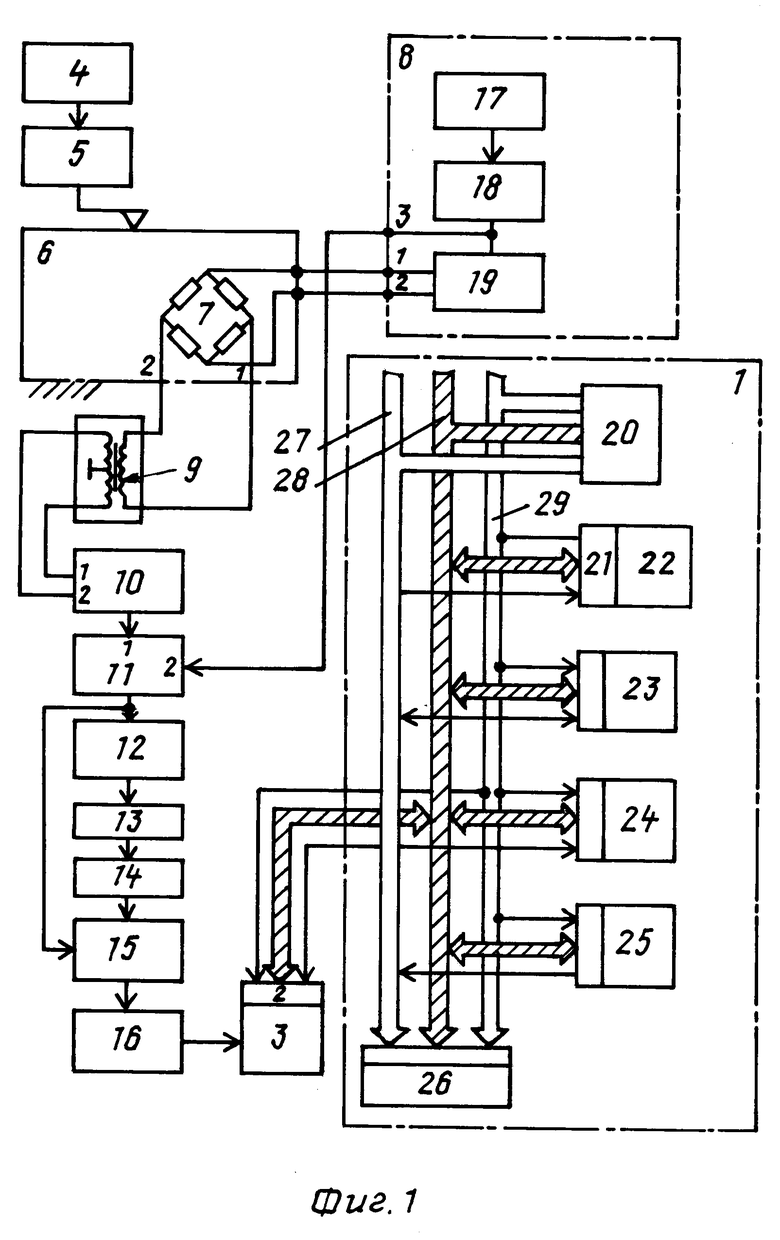
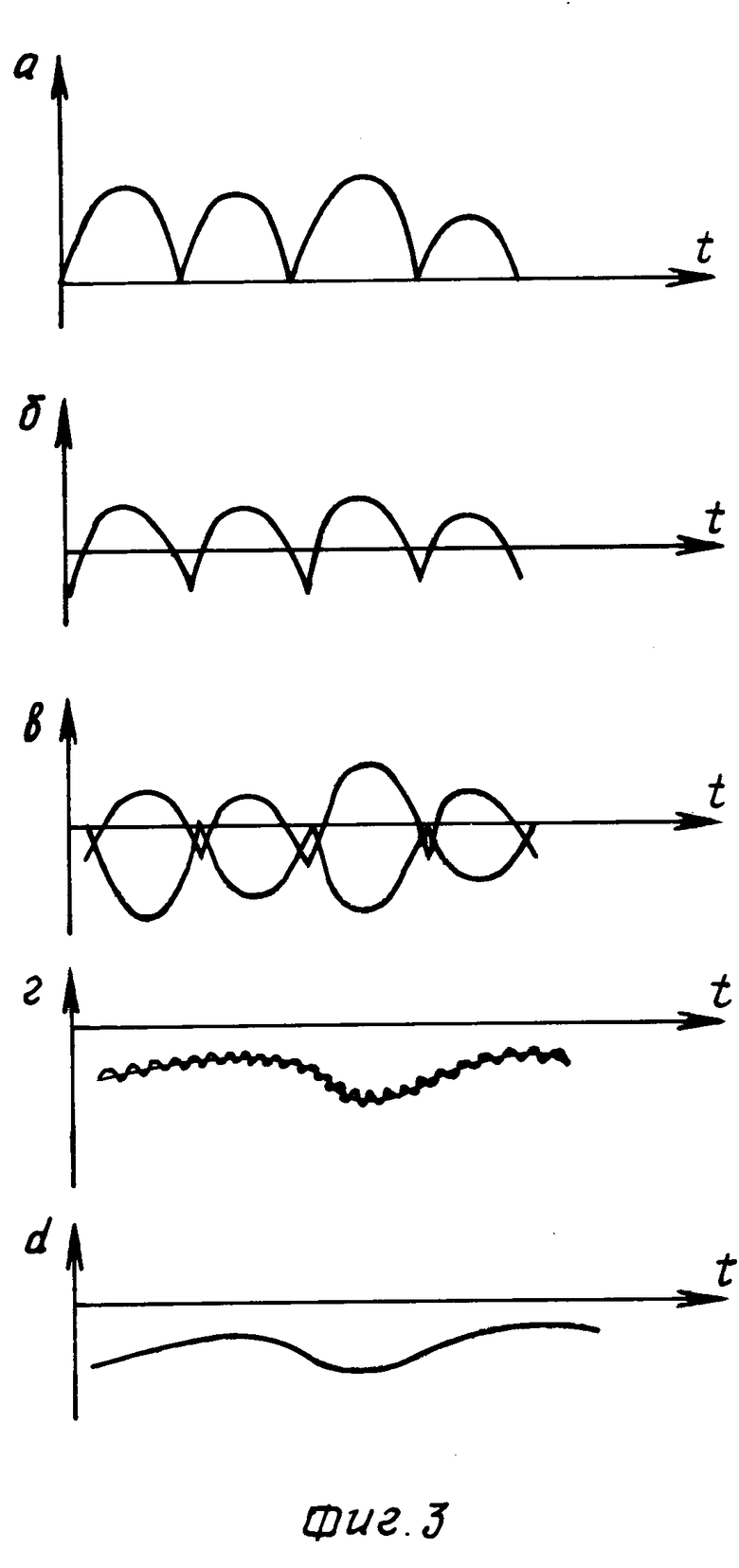
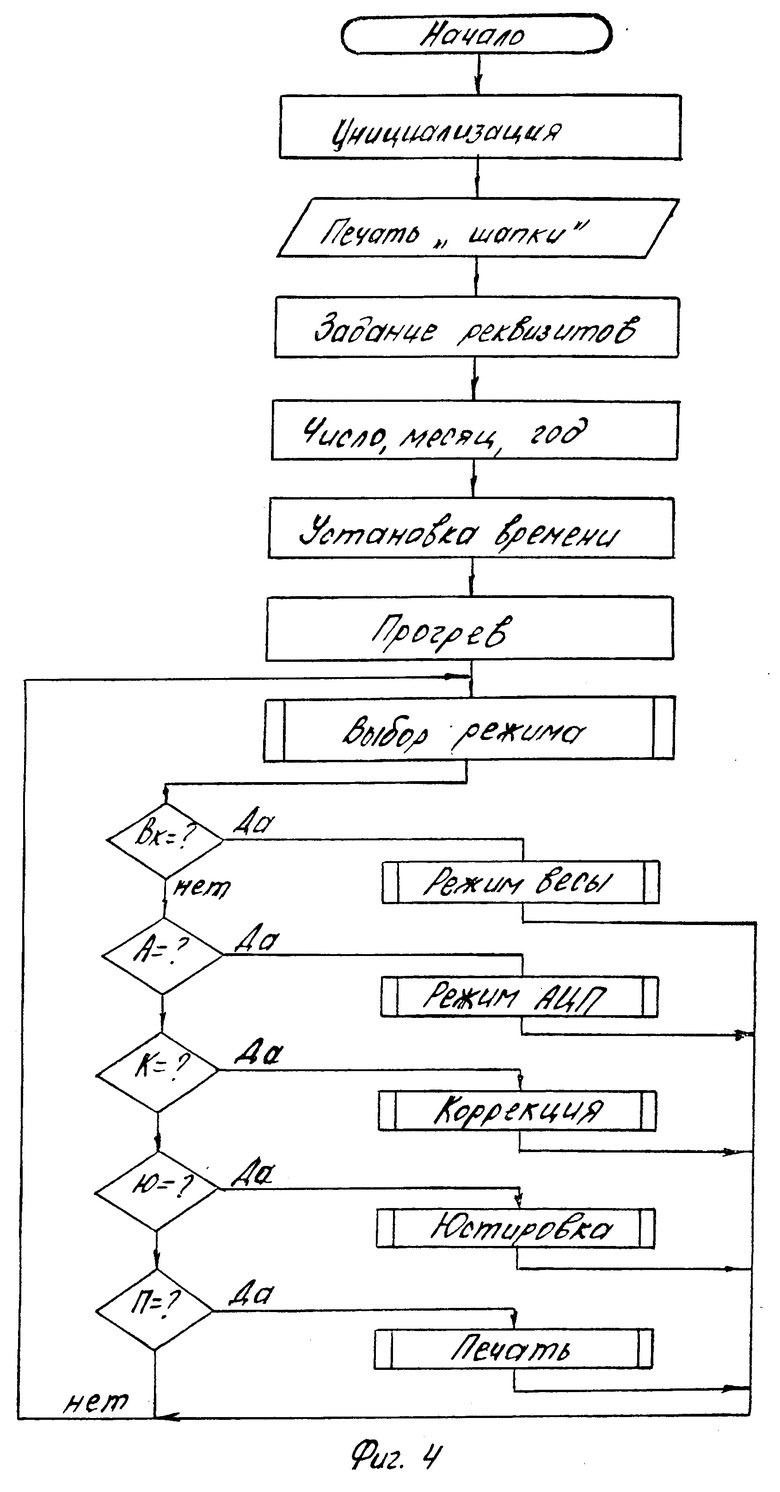
На фиг. 1 показана блок-схема электронных весов; на фиг. 2 схема повторителя, делителя напряжения, фильтра верхних частот, дифференциального усилителя и интегратора; на фиг. 3 циклограмма работы повторителя, делителя напряжения, фильтра верхних частот, дифференциального усилителя и интегратора; на фиг. 4 алгоритм работы электронных весов.
Электронные весы содержат микроЭВМ 1, порты 2 ввода-вывода, аналого-цифровой преобразователь 3, грузоприемную платформу 4, устройство 5 нагружения, передающее силовое воздействие от грузоприемной платформы 4 на тензометрический датчик 6, имеющий тензорезисторы, включенные в тензометрический мост 7, который соединен с первым и вторым выходами генератора синусоидального сигнала 8, а измерительная диагональ моста тензометрического датчика 7 подключена через измерительный трансформатор 9 к входам измерительного усилителя 10, выход которого соединен с первым входом фазового детектора 11, второй вход которого подключен к третьему выходу генератора 8 синусоидального сигнала, повторитель 12 напряжения, делитель 13 напряжения, фильтр 14 высоких частот, дифференциальный усилитель 15 и интегратор 15 соединены последовательно, причем к второму (инверсному) входу дифференциального усилителя 15 подключен выход фазового детектора 11, а выход интегратора 16 соединен с входом аналого-цифрового преобразователя 3.
Генератор 8 синусоидальных сигналов содержит кварцевый генератор 17, выход которого подключен к фильтру 18 низких частот, выход фильтра 18 низких частот соединен с третьим выходом генератора 8 синусоидальных сигналов и входом усилителя 19 мощности, выходы которого подключены к первому и второму выходам генератора 8 синусоидального сигнала.
МикроЭВМ 1 содержит центральный процессор 20, ОЗУ 21, ПЗУ 22, панель 23 управления, блок 24 индикации, таймер 25, блок 25 печати, соединенные между собой через внутренний интерфейс, включающий шину 27 управления, шину 28 данных, шину 29 адреса и соответствующие порты ввода-вывода.
Электронные весы работают следующим образом.
В исходном состоянии грузоприемная платформа 4 через устройство 5 нагружения погружает тензометрический датчик 6. Данное значение подгрузки тензометрического датчика 6 должно соответствовать нулевому значению веса. После включения питания (см. фиг. 4) происходит инициализация всех переменных и постоянных портов ввода-вывода и тестирование ОЗУ 21 и ПЗУ 22.
По окончании инициализации идет обращение в блоку 26 печати, который отпечатывает (шапку) заголовок "Электронные весы". Затем идет подсказка через блок 24 индикации "Число 9", устанавливается число, далее идет подсказка через блок 24 индикации "Месяц". Устанавливается текущий месяц, при этом блок индикации выдает подсказку "Год". Оператор устанавливает текущий год и текущее время, отсчитываемое таймером 25. Каждый переход осуществляется через клавишу "ВК" панели 23 управления.
После введения необходимых реквизитов микроЭВМ 1 переходит к подпрограмме "Прогрев", которая длится в течение 10 мин. По истечении 10 мин блок 24 индикации выдает подсказку "Режим". Для компенсации значения подгрузки тензометрического датчика 6 весом грузоподъемной платформы 4 необходимо включить режим "Коррекция "К=". При этом сигнал переменной частоты от генератора 8 синусоидального сигнала запитывает мост тензометрического датчика.
Тензометрический датчик 6 воспринимает первоначальную нагрузку и сигнал разбаланса тензометрического моста 7 в виде амплитудно-модулированного сигнала, поступает на вход измерительного трансформатора 9 и далее на вход измерительного усилителя 10.
После усиления измерительным усилителем 10 амплитудно-модулированный сигнал поступает на вход фазового детектора 11, на другой вход которого подается опорный сигнал с генератора 8 синусоидального сигнала. С выхода фазового детектора 11 демодулированный сигнал (см. фиг. 3а) поступает на повторитель 12 напряжения, который необходим для развязки от делителя 13 напряжения и выхода фазового детектора 11, а также на инверсный вход дифференциального усилителя 14, на другой вход которого поступает сигнал с фильтра 13 верхних частот (см. фиг. 8б). Частота среза фильтра 13 верхних частот рассчитывается, исходя из требований непрохождения рабочего диапазона низкочастотной огибающей рабочего сигнала.
Таким образом, если диапазон низкочастотного рабочего сигнала лежит в диапазоне, например, 0-10 Гц, тогда частота среза фильтра верхних частот должна быть 10 Гц, кроме того, фильтр имеет определенный фазовый сдвиг на несущей частоте. В качестве простейшего фильтра 14 верхних частот в предлагаемой схеме применены емкость и резистор (см. фиг. 2).
После прохождения низкочастотные шумовые сигналы (огибающие), прошедшие через фильтр верхних частот, складываются в противофазе с рабочим сигналом (см. фиг. 3в), в котором присутствуют все рабочие и шумовые сигналы, происходит вычитание и, таким образом, получаем низкочастотную огибающую с минимальными пульсациями (фиг. 3б) без наличия шумовых сопутствующих низкочастотных составляющих в огибающей. Далее с выхода сигнал поступает на вход интегратора 16, который убирает пульсации сигнала, и подает исходный сигнал на вход аналого-цифрового преобразователя 3. Значения аналого-цифрового преобразователя 3 опрашиваются через порта 2 ввода-вывода микроЭВМ 1 и обрабатываются соответствующим образом.
На блок 24 индикации выдается информация о подгрузке тензометрического датчика 6 в исходном состоянии. Данное значение микроЭВМ 1 запоминается в ОЗУ 21, и при последующих взвешиваниях это значение является нулевым, т.е. исходным.
После окончания режима "Коррекция" блок 24 индикации индицирует исходный нуль. Электронные весы готовы к взвешиванию. При нагружении электронных весов определенным значением веса устанавливается режим "Весы". В данном режиме происходят процессы, описанные выше в режиме "Коррекция", и аналого-цифровой преобразователь 3 выдает значения, соответствующие данному значению веса.
МикроЭВМ 1 обрабатывает поступившие через порт 2 ввода-вывода значения в соответствии с алгоритмом и отображает блоком 24 индикации взвешенное значение веса.
По сравнению с прототипом электронные весы обладают повышенной точностью за счет компенсации помехи, превышающей частоту рабочего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДИАПАЗОННЫЕ ЭЛЕКТРОННЫЕ ВЕСЫ | 1997 |
|
RU2133945C1 |
| КОМБИНАЦИОННЫЙ ДОЗАТОР | 2002 |
|
RU2229103C2 |
| ЭЛЕКТРОННЫЕ ВЕСЫ | 2012 |
|
RU2517793C2 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| АВТОМАТИЗИРОВАННАЯ ВЕСОИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1992 |
|
RU2088895C1 |
| ВЕСОПОВЕРОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2022833C1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277034A1 |
| Устройство для измерения угла сдвига фазы синусоидальных напряжений | 1982 |
|
SU1064227A1 |
| Устройство для взвешивания транспортных средств | 1988 |
|
SU1585688A1 |
| Устройство для контроля качества листовых и рулонных материалов | 1989 |
|
SU1677114A1 |

Использование: изобретение относится к весоизмерительной технике, в частности к автомобильным и товарным весам. Сущность изобретения: с целью повышения точности весов устройство содержит грузоприемную платформу, воздействующую через устройство нагружения на тензометрический датчик, с первым и вторым входами которого соединены первый и второй выходы генератора синусоидального сигнала, а измерительная диагональ моста тензометрического датчика подключена через измерительный трансформатор к входам измерительного усилителя, выход которого соединен с первым входом фазового детектора, к второму входу которого подключен третий выход генератора синусоидального сигнала. Кроме того, устройство содержит последовательно соединенные повторитель, делитель напряжения, фильтр высоких частот, дифференциальный усилитель, интегратор и аналого-цифровой преобразователь, выход которого подключен через порты ввода-вывода к входам и выходам микроЭВМ, при этом выход фазового детектора подключен к входу повторителя и второму входу дифференциального усилителя. 4 ил.
ЭЛЕКТРОННЫЕ ВЕСЫ, содержащие микроЭВМ, входы и выходы которой подключены через порты ввода-вывода к выходам аналого-цифрового преобразователя, грузоподъемную платформу, тензометрический датчик и устройство нагружения, передающее силовое воздействие от грузоприемной платформы на тензометрический датчик, первый и второй входы моста тензометрического датчика соединены с первым и вторым выходами генаратора синусоидального сигнала, а измерительная диагональ моста тензометрического датчика подключена через измерительный трансформатор к входам измерительного усилителя, выход которого соединен с первым входом фазового детектора, второй вход которого подключен к третьему выходу генератора синусоидального сигнала, отличающиеся тем, что в них введены повторитель, делитель напряжения, фильтр высоких частот, дифференциальный усилитель, интегратор, соединенные последовательно, при этом выход фазового детектора подключен на вход повторителя и к второму входу дифференциального усилителя, выход же интегратора подключен на вход аналого-цифрового преобразователя.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США N 4782904, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
