Предлагаемое изобретение относится к радиотехнике и может быть использовано для радиотехнических испытаний систем антенна-обтекатель (А-О).
Известен способ и устройство для измерения пеленгационных ошибок систем А-О, состоящий в измерении с помощью измерительных каналов углового смещения электрической оси (равносигнального направления) пеленгационной антенны с обтекателем, установленной на поворотном стенде.
Известен способ и устройство для измерения радиотехнических характеристик систем А-О, в котором измерение пеленгационных ошибок системы А-О осуществляется путем определения углового смещения электрической оси антенны с обтекателем, установленной на поворотном стенде.
Известен способ измерения пеленгационных ошибок системы А-О, состоящий в измерении углового смещения электрической оси (равносигнальной зоны) антенны в системе А-О после установки обтекателя для каждого угла поворота строительной оси обтекателя относительно антенны и построении функциональной зависимости указанного углового смещения электрической оси, которое принимается за угловую ошибку системы А-О, от угла поворота обтекателя.
Недостатком известного способа измерений является недостаточная точность измерений, обусловленная погрешностью, вносимой поворотным устройством, и выражающаяся в дополнительном угловом смещении электрической оси антенны системы А-О, причиной которого является несовершенство поворотного устройства для поворота обтекателя. Для стабилизации антенны системы А-О в пространстве и поворота обтекателя применяется кинематическая схема с параллелограммным механизмом, несовершенство поворотного устройства обусловлено, как правило, неидентичностью изготовления смежных плеч параллелограммного механизма. Для стабилизации антенны системы А-О в пространстве и поворота обтекателя используется также кинематическая схема с гибкими лентами, в этом случае несовершенство поворотного устройства обусловлено, как правило, неидентичностью изготовления шкивов передаточного механизма. Несовершенство описанных поворотных устройств на практике приводит к неучитываемому угловому смещению электрической оси Δα антенны, вносимому поворотным устройством, типичная зависимость которого для различных углов поворота α поворотного устройства показана на фиг. 1а.
Эту зависимость можно снять с помощью лазера, установив его на антенне системы А-О и отмечая уходы луча лазера на экране, расположенном в дальней зоне, для различных углов поворота поворотного устройствa без установки обтекателя, однако точное измерение таким образом довольно сложно и трудоемко.
Так называемая "характеристика рабочего места" снимается путем измерения угловых смещений электрической оси (пеленгационных ошибок) антенны системы А-О при повороте поворотного устройства в отсутствие обтекателя на рабочей частоте применения используемой системы А-О. Типичная характеристика рабочего места показана на фиг. 1б.
Отметим, что эта характеристика получается в результате сложения двух составляющих: рассмотренной выше составляющей, обусловленной несовершенством поворотного устройства (пунктирная кривая), и флюктуационной составляющей, обусловленной дифракцией (отражениями) электромагнитных волн от установочного кольца для установки обтекателя и от других элементов конструкции поворотного устройства в процессе его поворота. В общем случае условия возбуждения дифракционных волн при установке обтекателя на установочное кольцо поворотного устройства меняются, и вклад флюктуационной составляющей в результирующие пеленгационные ошибки системы А-О с установленным обтекателем также меняется по сравнению со случаем отсутствия обтекателя, поэтому для обеспечения достоверности радиотехнических испытаний вклад флюктуационной составляющей пеленгационной ошибки системы А-О должен обязательно входить в результат измерения пеленгационной ошибки системы А-О на заданном угле поворота поворотного устройства.
Отличительной особенностью составляющей пеленгационной ошибки, обусловленной несовершенством поворотного устройства (кривая на фиг. 1а), является ее хорошая повторяемость от измерения к измерению и независимость от длины электромагнитной волны, в то время как флюктуационная составляющая пеленгационной ошибки, зависящая от фазовых соотношений между падающей и отраженными электромагнитными волнами, зависит от длины электромагнитной волны, падающей на испытуемую систему А-О. Большая изрезанность флюктуационной составляющей в диапазоне углов поворота поворотного устройства обусловлена эффектом сложения электромагнитной волны, отраженной от установочного кольца и элементов поворотного устройства то в фазе, то в противофазе с электромагнитной волной, падающей на испытуемую систему А-О. Именно этот эффект приводит к тому, что частота изменения флюктуационной составляющей пеленгационной ошибки в несколько раз выше, чем частота изменения составляющей пеленгационной ошибки, обусловленной несовершенством поворотного устройства.
Целью предлагаемого изобретения является повышение точности измерения пеленгационных ошибок систем А-О. Это достигается тем, что в способе измерения пеленгационных ошибок систем антенна-обтекатель, заключающемся в измерении углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем относительно первоначального положения электрической оси без обтекателя и определении зависимости пеленгационных ошибок от угла поворота поворотного устройства с обтекателем, дополнительно определяют зависимость углового смещения электрической оси антенны от угла поворота поворотного устройства без обтекателя, выделяют из этой зависимости составляющую углового смещения электрической оси антенны, вносимого поворотным устройством на различных углах поворота, путем исключения флюктуационной составляющей углового смещения электрической оси, вносимого дифракцией электромагнитных волн, а затем корректируют зависимость пеленгационных ошибок системы А-О от угла поворота поворотного устройства путем вычитания из измеренного углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем выделенной составляющей углового смещения электрической оси антенны, вносимого поворотным устройством на том же угле поворота.
Исходя из данного выше определения измеренного значения пеленгационной ошибки системы А-О, можно ввести понятие откорректированной характеристики рабочего места (фиг. 1г), то есть зависимости пеленгационной ошибки от угла поворота поворотного устройства в отсутствие обтекателя, получаемой путем вычитания из исходной характеристики рабочего места (фиг. 1б) математически обработанной зависимости пеленгационной ошибки (фиг. 1в), вносимой поворотным устройством.
В качестве примера на фиг. 2 приведена блок-схема устройства, реализующего предлагаемый способ измерений. Устройство содержит поворотное устройство 1 с установленной на нем антенной 2, в процессе испытаний на поворотное устройство 1 устанавливается испытуемый обтекатель 3, на поворотном устройстве 1 установлен датчик угла поворота 4, выход антенны 2 соединен с измерителем пеленгационных ошибок 5; также имеются двухпозиционный переключатель 6 на два направления, первичное запоминающее устройство 7 для запоминания первичных данных, устройство математической обработки 8, вторичное запоминающее устройство 9 для запоминания результатов обработки, контроллер 10, вычитающее устройство 11, регистратор 12, генератор СВЧ 13, вспомогательная антенна 14 для формирования падающей на испытуемую систему А-О квазиплоской волны.
Работает описываемое устройство следующим образом. Предварительно в отсутствие обтекателя в положении "1" двухпозиционного переключателя 6 снимается характеристика рабочего места путем поворота поворотного устройства 1 в заданном рабочем диапазоне углов поворота с запоминанием измеренных пеленгационных ошибок рабочего места как функции угла поворота в первичном запоминающем устройстве 7 и записью результатов измерений в регистраторе 12. Затем осуществляется математическая обработка запомненных первичных данных с целью выделения составляющей углового смещения электрической оси антенны, вносимого поворотным устройством 1 на различных углах поворота, путем исключения флюктуационной составляющей углового смещения электрической оси, вносимого дифракцией электромагнитных волн. Эта выделенная составляющая запоминается во вторичном запоминающем устройстве 9. Далее двухпозиционный переключатель 6 переводится в положение "2". В этом случае, как видно из блок-схемы фиг. 2, из результата измерения углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем на выходе измерителя пеленгационных ошибок 5 будет вычитаться в вычитающем устройстве 11 выделенная составляющая углового смещения электрической оси антенны, вносимого поворотным устройством 1 на том же угле поворота, и откорректированное значение пеленгационной ошибки системы А-О будет записываться регистратором 12.
Для согласования работы поворотного устройства 1 с работой вторичного запоминающего устройства 9 для управления последним служит контроллер 10. Таким образом, если снять характеристику рабочего места в отсутствие обтекателя в положении "2" двухпозиционного переключателя 6, то она будет откорректирована и не содержать составляющей углового смещения электрической оси антенны, вносимого поворотным устройством.
Следует отметить, что решение задачи математической обработки зависимости углового смещения электрической оси антенны от угла поворота поворотного устройства без обтекателя осуществляется известными методами математического анализа, например, путем аппроксимации методом наименьших квадратов с помощью полиномов. При этом необходимая информация об амплитуде и периоде изменения флюктуационной составляющей углового смещения электрической оси, вносимого дифракцией электромагнитных волн может быть получена также известными методами теории электродинамики исходя из рабочей длины волны электромагнитного поля, геометрических размеров установочного кольца и других элементов конструкции поворотного устройства. Практически математическая обработка зависимости пеленгационной ошибки рабочего места осуществлялась путем аппроксимации методом наименьших квадратов полиномом семнадцатой степени, и все процедуры, связанные с реализацией предлагаемого способа измерения пеленгационных ошибок системы А-О, осуществлялись автоматически с использованием персонального компьютера типа Pentium.
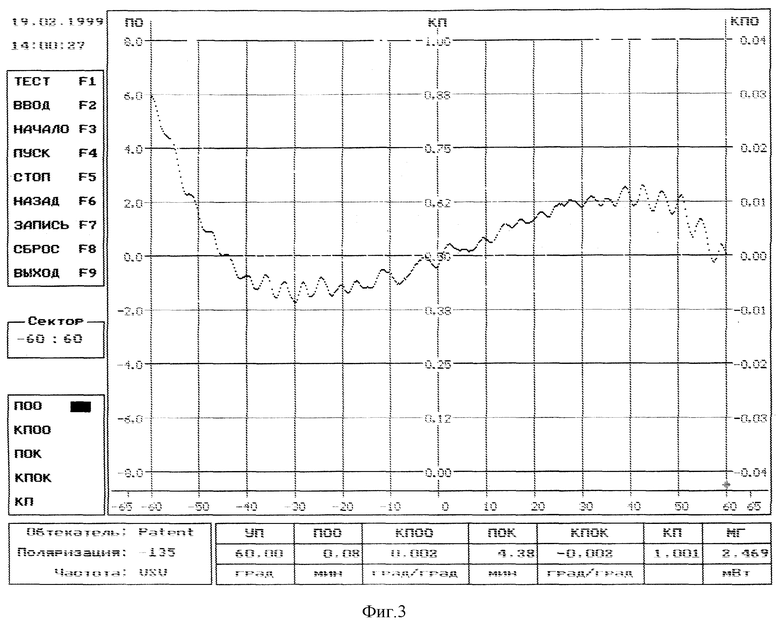
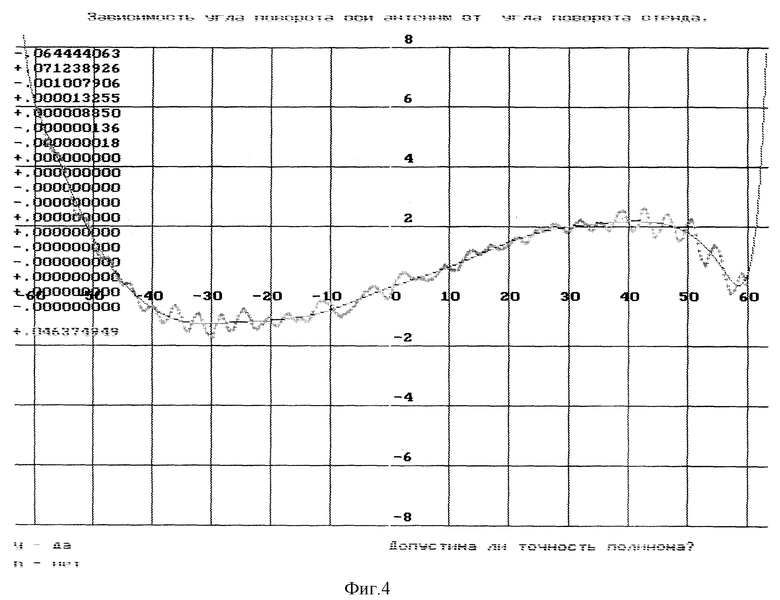
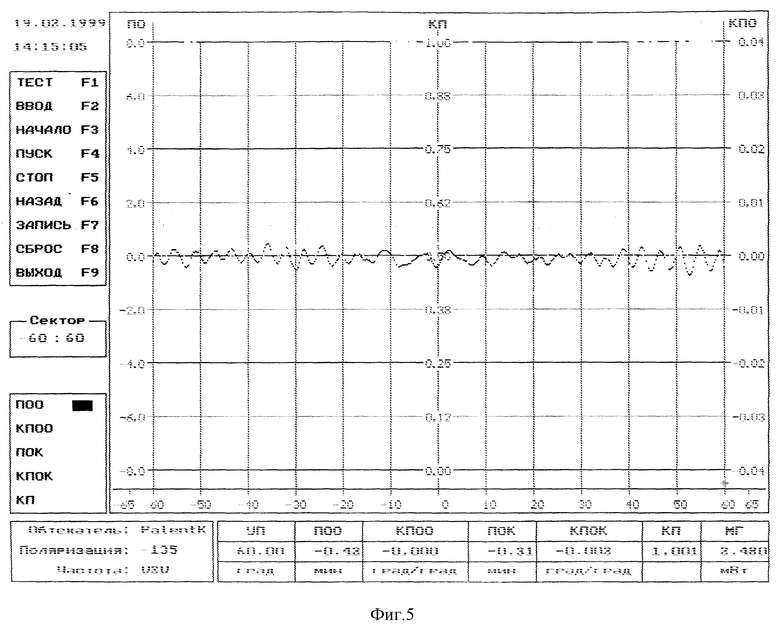
В качестве примера на фиг. 3-5 приведены натурные записи реализации предлагаемого способа измерения пеленгационных систем антенна-обтекатель в автоматическом комплексе для радиотехнических испытаний систем А-О. На фиг. 3 приведена исходная неоткорректированная характеристика рабочего места. На фиг. 4 приведена та же характеристика и функциональная зависимость составляющей углового смещения электрической оси антенны, вносимого поворотным устройством, от угла поворота, полученная в результате математической обработки исходной характеристики рабочего места путем аппроксимации полиномом семнадцатой степени методом наименьших квадратов (в левой части фиг. 4 приведены численные значения коэффициентов полинома и в нижней части - ожидаемая погрешность аппроксимации). На фиг. 5 приведена откорректированная характеристика рабочего места, полученная в результате реализации предложенного способа измерения пеленгационных ошибок систем А-О.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЕЛЕНГАЦИОННЫХ ОШИБОК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ САМОЛЕТА С УСТАНОВЛЕННОЙ НА НЕМ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2011 |
|
RU2465611C1 |
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 2005 |
|
RU2287834C1 |
| ИЗМЕРИТЕЛЬ КОЭФФИЦИЕНТА ПРОХОЖДЕНИЯ СИГНАЛА СИСТЕМЫ АНТЕННА-ОБТЕКАТЕЛЬ | 2005 |
|
RU2310209C2 |
| Способ измерения пеленгационных ошибок системы ФАР-обтекатель радиолокационной станции | 2019 |
|
RU2730096C1 |
| Способ измерения пеленгационных ошибок системы антенна-обтекатель радиолокационной станции | 2019 |
|
RU2697883C1 |
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА - ОБТЕКАТЕЛЬ | 2010 |
|
RU2442181C1 |
| УСТРОЙСТВО ПЕЛЕНГАЦИИ И СОПРОВОЖДЕНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ ПЕЛЕНГАЦИОННОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ АНТЕННА-ОБТЕКАТЕЛЬ | 2014 |
|
RU2563625C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ С КОМПЕНСАЦИЕЙ ПЕЛЕНГАЦИОННЫХ ОШИБОК СИСТЕМЫ АНТЕННА - ОБТЕКАТЕЛЬ | 2005 |
|
RU2284534C1 |
| АНТЕННЫЙ ОБТЕКАТЕЛЬ | 2013 |
|
RU2573199C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 1997 |
|
RU2133478C1 |

Способ измерения пеленгационных ошибок систем антенна-обтекатель заключается в измерении углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем относительно первоначального положения электрической оси антенны без обтекателя и определении зависимости пеленгационных ошибок от угла поворота поворотного устройства с обтекателем, при этом определяют зависимость углового смещения электрической оси антенны от угла поворота поворотного устройства без обтекателя, выделяют из этой зависимости составляющую углового смещения электрической оси антенны, вносимого поворотным устройством на различных углах поворота, путем исключения флюктуационной составляющей углового смещения электрической оси, вносимого дифракцией электромагнитных волн, а затем корректируют зависимость пеленгационных ошибок системы антенна-обтекатель от угла поворота поворотного устройства путем вычитания из измеренного углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем выделенной составляющей углового смещения электрической оси антенны, вносимого поворотным устройством на том же угле поворота. Технический результат заключается в повышении точности измерения. 5 ил.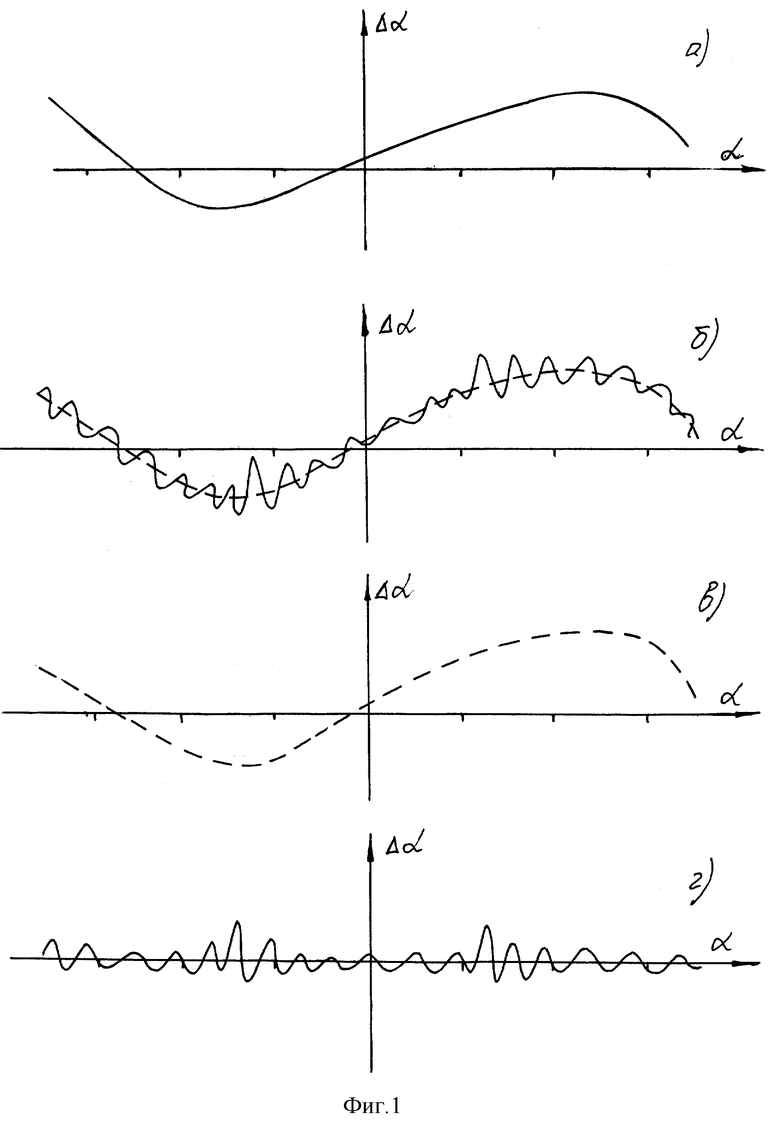
Способ измерения пеленгационных ошибок систем антенна-обтекатель, заключающийся в измерении углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем относительно первоначального положения электрической оси антенны без обтекателя и определении зависимости пеленгационных ошибок от угла поворота поворотного устройства с обтекателем, отличающийся тем, что определяют зависимость углового смещения электрической оси антенны от угла поворота поворотного устройства без обтекателя, выделяют из этой зависимости составляющую углового смещения электрической оси антенны, вносимого поворотным устройством на различных углах поворота, путем исключения флюктуационной составляющей углового смещения электрической оси, вносимого дифракцией электромагнитных волн, а затем корректируют зависимость пеленгационных ошибок системы антенна-обтекатель от угла поворота поворотного устройства путем вычитания из измеренного углового смещения электрической оси антенны на заданном угле поворота поворотного устройства с обтекателем выделенной составляющей углового смещения электрической оси антенны, вносимого поворотным устройством на том же угле поворота.
| ПРИГОДА В.А | |||
| и др | |||
| Обтекатели антенн летательных аппаратов | |||
| - М.: Машиностроение, 1970, с.265-268 | |||
| RU, 2133478, C1, 20.07.1999 | |||
| SU, 459744, 07.04.1975 | |||
| Методы измерения характеристик антенн СВЧ./Под ред | |||
| Н.М.Цейтлина | |||
| - М.: Радио и связь, 1985, с.334 | |||
| SU, 817615, 04.09.1977 | |||
| SU, 1681208 A1, 30.09.1991. |

