Изобретение относится к радиотехнике и может быть использовано в системах сопровождения целей.
Известно, что в системах антенна - обтекатель (А-О) размещение пеленгационной антенны под радиопрозрачным обтекателем из-за искажений падающего электромагнитного поля приводит к появлению пеленгационных ошибок в устройствах сопровождения [Пригода Б.А., Кокунько B.C. Обтекатели антенн летательных аппаратов. 2-е изд., перераб. и доп. М.: Машиностроение, 1978].
Известно устройство для сопровождения целей, состоящее из многоканальной пеленгационной антенны, пеленгационного приемника и электромеханического привода пеленгационной антенны, в котором выходы пеленгационной антенны соединены с входами пеленгационного приемника, выходы которого соединены с входами электромеханического привода пеленгационной антенны, а выход электромеханического привода механически соединен с пеленгационной антенной, которая также механически соединена с датчиком углов поворота пеленгационной антенны [Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М., изд-во «Советское радио», 1970, стр.22].
Одним из недостатков известных устройств сопровождения является низкая точность сопровождения из-за влияния пеленгационных ошибок системы А-О, что обусловлено двумя группами причин. Во-первых, в процессе сопровождения в общем случае могут непредсказуемым образом меняться следующие текущие параметры сопровождения: частота падающей электромагнитной волны, ее поляризационные характеристики (угол наклона главной оси поляризационного эллипса относительно плоскости поляризации пеленгационной антенны и коэффициент эллиптичности); температура в различных точках обтекателя; время отсчета от начала сопровождения и так далее. Изменение значений упомянутых параметров сопровождения приводит к изменению значений составляющих пеленгационных ошибок системы А-О. Во-вторых, значения составляющих пеленгационных ошибок системы А-О зависят от углового положения пеленгационной антенны относительно обтекателя. Поскольку траектория перемещения цели, как правило, недетерминирована, углы поворота пеленгационной антенны в процессе сопровождения также непредсказуемы, что приводит в конечном счете к недетерминированному характеру изменения составляющих пеленгационных ошибок системы А-О в процессе сопровождения. Эти две группы причин на практике существенно затрудняют учет и компенсацию пеленгационных ошибок в системе А-О путем введения поправок.
Целью предлагаемого изобретения является повышение точности сопровождения путем компенсации пеленгационных ошибок системы А-О.
Указанная цель достигается за счет того, что в известное устройство сопровождения, содержащее последовательно соединенные пеленгационную антенну и пеленгационный приемник, электромеханический привод, механически соединенный с пеленгационной антенной, которая также механически соединена с датчиком углов поворота пеленгационной антенны, дополнительно введены вычитающее устройство, устройство хранения узловых данных, вычислитель координат ближних узлов, вычислитель аппроксимирующих сплайнов, датчик текущих параметров сопровождения, причем выходы датчика углов поворота пеленгационной антенны соединены с угломерными входами вычислителя координат ближних узлов и с угломерными входами вычислителя аппроксимирующих сплайнов, параметрические входы которого соединены с выходами датчика текущих параметров сопровождения, задающие выходы вычислителя аппроксимирующих сплайнов соединены с входами устройства хранения узловых данных, выходы которого подключены к входам вычислителя аппроксимирующих сплайнов, узловые выходы которого соединены с входами вычислителя координат ближних узлов, выходы которого соединены с входами координат ближних узлов вычислителя аппроксимирующих сплайнов, выходы которого соединены с входами поправок вычитающего устройства, входы которого соединены с выходами пеленгационного приемника, а выходы подключены к входам электромеханического привода.
На чертеже изображена блок-схема предлагаемого устройства,
где: 1 - пеленгационная антенна;
2 - обтекатель;
3 - пеленгационный приемник;
4 - вычитающее устройство;
5 - электромеханический привод;
6 - датчик углов поворота пеленгационной антенны;
7 - вычислитель координат ближних узлов;
8 - вычислитель аппроксимирующих сплайнов;
9 - устройство хранения узловых данных;
10 - датчик текущих параметров сопровождения.
Пеленгационная антенна 1, имеющая несколько сигнальных каналов (как правило - 3) и, соответственно, выходов заключена в обтекатель 2. Выходы пеленгационной антенны 1 соединены с входами пеленгационного приемника 3, выходы которого соединены с входами вычитающего устройства 4, выходы которого соединены с входами электромеханического привода 5. Выходы электромеханического привода 5 механически соединены с пеленгационной антенной 1, которая также механически соединена с датчиком углов поворота пеленгационной антенны 6. Выходы датчика углов поворота пеленгационной антенны 6 соединены с угломерными входами вычислителя координат ближних узлов 7 и с угломерными входами вычислителя аппроксимирующих сплайнов 8, задающие выходы которого подключены к входам устройства хранения узловых данных 9, выходы которого соединены с входами вычислителя аппроксимирующих сплайнов 8. Параметрические входы вычислителя аппроксимирующих сплайнов 8 соединены с выходами датчика текущих параметров сопровождения 10.
Работает предлагаемое устройство следующим образом. Все поле возможных значений углов поворота пеленгационной антенны в обтекателе разбивается в декартовой системе координат на сектора обычно квадратной формы. Точка в месте сопряжения смежных секторов называется узлом и определяется координатами узла. Каждому i-тому узлу с известными координатами α1i, α2i соответствуют два значения Δα1i и Δα2i составляющих пеленгационных ошибок системы А-О соответственно по координате α1 и по координате α2. Совокупность значений {α1i, α2i; Δα1i, Δα2i} называется узловыми данными. На стадии предварительных экспериментальных испытаний для различных фиксированных значений параметров сопровождения в узловых точках, в рабочем диапазоне углов поворота пеленгационной антенны относительно обтекателя измеряются составляющие пеленгационных ошибок системы А-О, то есть фиксируются узловые данные. Это семейство узловых данных размещается в устройстве хранения узловых данных 9. Затем в зависимости от поставленной задачи устанавливаются новые значения параметров сопровождения, например, изменяется частота, снова измеряются узловые данные и новое семейство узловых данных вновь заносится в устройство хранения узловых данных 9. В конце этих процедур в устройстве хранения узловых данных 9 размещается массив семейств узловых данных, соответствующих различным рабочим значениям параметров сопровождения.
В процессе сопровождения из устройства хранения узловых данных 9 извлекается семейство узловых данных, соответствующее текущими значениям параметров сопровождения, и размещается в вычислителе аппроксимирующих сплайнов 8. Далее в вычислителе координат ближних узлов 7 в результате анализа текущей угломерной информации об углах поворота пеленгационной антенны подбираются ближние узловые точки (не менее трех точек), координаты которых расположены в непосредственной близости от текущих значений углов поворота пеленгационной антенны. Затем по узловым данным ближних точек строятся локальные сплайны (при трех узловых точках это плоскость) и вычисляются значения локальных сплайнов для текущих значений углов поворота пеленгационной антенны α1, α2. Алгоритм вычисления локальных сплайнов подробно описан в [Голованов Н.Н. Геометрическое моделирование. - М.: Изд-во физико-математической литературы, 2002]. В результате вычисления локальных сплайнов определяются текущие значения составляющих пеленгационных ошибок системы А-О Δα1 и Δα2, которые используются затем в качестве поправок в вычитающем устройстве 4. В зависимости от требуемой точности сопровождения и соответственно выбранного количества ближних точек локальные сплайны могут быть любого порядка. В случае, когда в устройстве хранения узловых данных 9 отсутствует семейство узловых данных с требуемыми параметрами, в вычислитель аппроксимирующих сплайнов 8 из устройства хранения узловых данных 9 извлекаются семейства узловых данных с значениями параметров, близкими к заданным. Для каждого из этих семейств в вычислителе аппроксимирующих сплайнов 8 вычисляются поправки для текущего углового положения пеленгационной антенны. Далее по найденным таким образом значениям поправок с помощью классических методов интерполяции для текущих значений параметров сопровождения вычисляются поправки, используемые затем в качестве текущих поправок в вычитающем устройстве 4.
Таким образом в предлагаемом устройстве за счет введения новых устройств и новых связей реализуется режим функционирования, при котором в процессе сопровождения непрерывно вводятся поправки, рассчитываемые непосредственно в процессе сопровождения в соответствии с текущим угловым положением пеленгационной антенны относительно обтекателя и текущими значениями параметров сопровождения: рабочей частотой падающей электромагнитной волны, ее поляризационными характеристиками, температурой в различных точках обтекателя, временем отсчета от начала сопровождения, а также любыми другими параметрами, от которых зависят пеленгационные ошибки системы А-О. Это позволяет компенсировать пеленгационные ошибки системы А-О, осуществляя слежение за истинным направлением на цель, и за счет этого достичь в предлагаемом устройстве повышения точности сопровождения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПЕЛЕНГАЦИИ И СОПРОВОЖДЕНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ ПЕЛЕНГАЦИОННОЙ ХАРАКТЕРИСТИКИ СИСТЕМЫ АНТЕННА-ОБТЕКАТЕЛЬ | 2014 |
|
RU2563625C1 |
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 2005 |
|
RU2287834C1 |
| ИЗМЕРИТЕЛЬ КОЭФФИЦИЕНТА ПРОХОЖДЕНИЯ СИГНАЛА СИСТЕМЫ АНТЕННА-ОБТЕКАТЕЛЬ | 2005 |
|
RU2310209C2 |
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА - ОБТЕКАТЕЛЬ | 2010 |
|
RU2442181C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |
| СПОСОБ МНОГОПОЗИЦИОННОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДКМВ ПЕРЕДАТЧИКОВ | 2004 |
|
RU2285935C2 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| МОНОИМПУЛЬСНЫЙ РАДИОЛОКАТОР СО СКВОЗНЫМИ ФАЗОВЫМИ КАНАЛАМИ | 2002 |
|
RU2232403C1 |
| МОНОИМПУЛЬСНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2004 |
|
RU2273863C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
Изобретение относится к радиотехнике и может быть использовано в системах сопровождения целей. Техническим результатом является повышение точности сопровождения путем компенсации пеленгационных ошибок системы антенна - обтекатель. В устройство сопровождения с компенсацией пеленгационных ошибок системы антенна - обтекатель, содержащее пеленгационную антенну, пеленгационный приемник, электромеханический привод, датчик углов поворота пеленгационной антенны, дополнительно введены вычитающее устройство, устройство хранения узловых данных, вычислитель координат ближних узлов, вычислитель аппроксимирующих сплайнов, датчик текущих параметров сопровождения. В процессе сопровождения непрерывно вводятся поправки, рассчитываемые в соответствии с текущим угловым положением пеленгационной антенны относительно обтекателя и текущими значениями параметров сопровождения. 1 ил.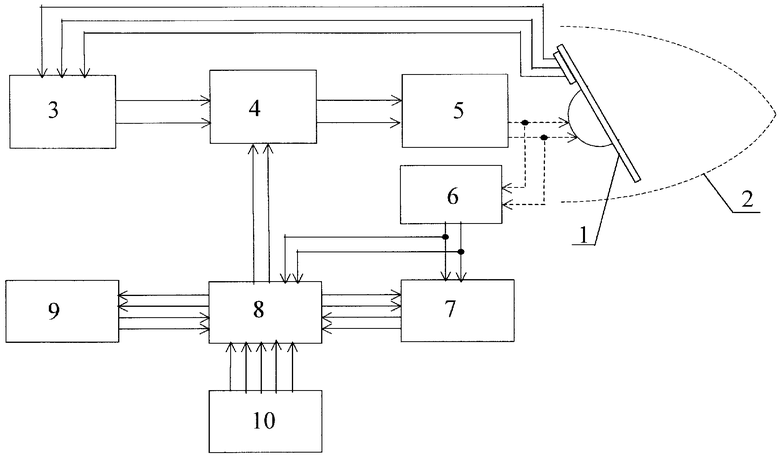
Устройство сопровождения с компенсацией пеленгационных ошибок системы антенна - обтекатель, содержащее последовательно соединенные пеленгационную антенну и пеленгационный приемник, электромеханический привод, выходы которого механически соединены с пеленгационной антенной, которая механически соединена с датчиком углов поворота пеленгационной антенны, отличающееся тем, что в него дополнительно введены вычитающее устройство, устройство хранения узловых данных, вычислитель координат ближних узлов, вычислитель аппроксимирующих сплайнов, датчик текущих параметров сопровождения, причем выходы датчика углов поворота пеленгационной антенны соединены с угломерными входами вычислителя координат ближних узлов и с угломерными входами вычислителя аппроксимирующих сплайнов, параметрические входы которого соединены с выходами датчика текущих параметров сопровождения, задающие выходы вычислителя аппроксимирующих сплайнов соединены с входами устройства хранения узловых данных, выходы которого подключены к входам вычислителя аппроксимирующих сплайнов, узловые выходы которого соединены с входами вычислителя координат ближних узлов, выходы которого соединены с входами координат ближних узлов вычислителя аппроксимирующих сплайнов, выходы которого соединены с входами поправок вычитающего устройства, входы которого соединены с выходами пеленгационного приемника, а выходы - подключены к входам электромеханического привода.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 1997 |
|
RU2133478C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕЛЕНГАЦИОННЫХ ОШИБОК СИСТЕМ АНТЕННА-ОБТЕКАТЕЛЬ | 1999 |
|
RU2162232C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ | 2003 |
|
RU2249232C2 |
| Устройство для измерения угловых ошибок | 1972 |
|
SU459744A1 |
| Стенд для измерения радиотехни-чЕСКиХ пАРАМЕТРОВ АНТЕННыХ ОбТЕКА-ТЕлЕй | 1979 |
|
SU817615A1 |
| Устройство для измерения коэффициента рассеяния антенны | 1985 |
|
SU1357879A1 |
| US 4568940 A, 04.02.1986 | |||
| US 6144333 A, 07.11.2000 | |||
| DE 3030983 A1, 20.12.1990 | |||
| ЦИФРОВОЙ ФАЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ СДВИГА ФАЗ | 0 |
|
SU381038A1 |

