Предлагаемое изобретение относится к авиационной технике, в частности к радиолокационным устройствам, и может быть использовано для измерения пеленгационных ошибок в системы антенна радиопрозрачный обтекатель (РПО) бортовой радиолокационной станции (БРЛС).
Известен способ измерения пеленгационных ошибок системы антенна-обтекатель самолета с установленной на нем бортовой радиолокационной станцией [RU 2465611 С1 опубл. 27.10.2012 г. МПК G01R 29/10], и состоящий в измерении углового смещения равносигнального направления антенны на заданном угле поворота антенны с обтекателем и определении пеленгационных ошибок в зависимости от угла поворота. При этом одновременно производят измерение бортовой радиолокационной станцией углов пеленгации установленных на земле радиолокационных отражателей антенны и определение эталонных углов пеленгации путем пересчета известных геодезических координат (широты, долготы и высоты h) радиолокационных отражателей и текущих геодезических координат самолета, формируемых его навигационной системой, а определение пеленгационных ошибок производят вычислением разницы между эталонными углами пеленгации и величинами углов пеленгации, измеренными БРЛС. По завершении пеленгации наземных радиолокационных отражателей производят расчет эталонных величин азимута (АЗэт) и угла места (УМэт) путем решения обратной геодезической задачи для каждой точки траектории полета, где БРЛС пеленгует наземные радиолокационные отражатели, и расчет ошибок пеленгации путем вычитания из замеренных БРЛС значений A3 и УМ эталонных углов пеленгации. Расчет углов пеленгации из геодезических координат носит название «обратной геодезической задачи в пространственной системе координат».
Недостатками предложенного способа можно считать что:
- для всех возможных углов установки луча АС в системе антенна-обтекатель, данный способ потребовал бы от самолета-носителя БРЛС очень сложных ракурсов полета, что делает данный способ практически неприемлемым для измерения УОП по всей поверхности обтекателя.
- обеспечение проведения полномасштабных испытаний по данному способу в целом является весьма затратным.
Указанный недостаток устранен в «Способе измерения пеленгационных ошибок системы антенна-обтекатель радиолокационной станции», [RU 2697883 С1 опубл. 21.08.2019 г. МПК G01R 29/10], основанном на измерении углового смещения пространственного положения минимума, формируемого разностными диаграммами направленности антенны на заданных углах поворота ее по азимуту и крену и определении пеленгационных ошибок в зависимости от этих углов. До установки обтекателя азимутальная плоскость сканирования опорно-поворотного устройства антенны (ОПУА) с установленной на ней на угле крена Ψj фазированной антенной решеткой юстируется таким образом, чтобы азимутальная плоскость сканирования опорно-поворотного устройства антенны совпадала с горизонтальной плоскостью. После чего луч фазированной антенной решетки устанавливается по координатам  вводимым в блок управления лучом ФАР и рассчитываемым по выбранному углу крена Ψj, и произвольному углу отклонения луча от нормали θoi из всего возможного диапазона отклонений луча для конкретной ФАР по формулам
вводимым в блок управления лучом ФАР и рассчитываемым по выбранному углу крена Ψj, и произвольному углу отклонения луча от нормали θoi из всего возможного диапазона отклонений луча для конкретной ФАР по формулам  что делает возможным, путем азимутального сканирования ОПУА от центрального угла (-θoi), одновременно измерить горизонтальные сечения обеих разностных ДН, где их измеряемые угловые координаты минимумов совпадают на всех возможных для данной ФАР углах отклонения луча от нормали θoi. Затем все измерения повторяются на других выбранных углах крена ФАР, а после установки обтекателя и проведения соответствующих измерений по тем же, что и до его установки, углам крена и углам отклонения луча от нормали, по изменившимся угловым координатам минимумов в сечениях разностных ДН системы ФАР-обтекатель, соответствующие составляющие пеленгационной ошибки в координатах αх и αу, вносимые обтекателем на углах Ψj, θoi установки системы ФАР-обтекатель, могут быть рассчитаны по формулам:
что делает возможным, путем азимутального сканирования ОПУА от центрального угла (-θoi), одновременно измерить горизонтальные сечения обеих разностных ДН, где их измеряемые угловые координаты минимумов совпадают на всех возможных для данной ФАР углах отклонения луча от нормали θoi. Затем все измерения повторяются на других выбранных углах крена ФАР, а после установки обтекателя и проведения соответствующих измерений по тем же, что и до его установки, углам крена и углам отклонения луча от нормали, по изменившимся угловым координатам минимумов в сечениях разностных ДН системы ФАР-обтекатель, соответствующие составляющие пеленгационной ошибки в координатах αх и αу, вносимые обтекателем на углах Ψj, θoi установки системы ФАР-обтекатель, могут быть рассчитаны по формулам:


Где
 - составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
 - составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву, на котором, до установки обтекателя, измеряемые минимумы горизонтальных сечений разностных диаграмм совпадают,
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны,
θai - измеренный, после установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
θyi - измеренный, после установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj.
Предлагаемый способ измерения пеленгационных ошибок системы антенна-обтекатель, который и выбран в качестве прототипа, позволяет оценить составляющие пеленгационной ошибки по значительно большей произвольной поверхности обтекателя. Однако для корректного измерения компонент УОП, такой способ подразумевает обязательное совпадение угловых координат минимумов одновременно измеряемых горизонтальных сечений обеих разностных ДН до установки радиопоглощающего обтекателя (РПО) на ФАР, что соответствует правильно выбранному пеленгу на источник сигнала. Причем, это требование должно выполняться на всех возможных для данной ФАР углах отклонения луча от нормали θoi (соответствуют противоположным азимутальным углам установки ОПУА с ФАР) и на всех доступных углах установки ее по крену Ψj. Главный недостаток данного способа измерений заключается в том, что из-за несовершенства механической системы позиционирования, выполнение этих условий на всех углах установки θoi, Ψj достигнуть сложно и потребует длительной механической юстировки ОПУА в каждой точке измерения.
Поэтому задачей данного изобретения является обеспечение возможности выполнения условия совпадения угловых координат минимумов измеряемых сечений обеих разностных ДН ФАР во всех точках, где производится измерение компонент УОП (т.е. на всех углах установки θoi, Ψj до установки РПО), что соответствует точному пеленгу на фронт приходящей электромагнитной волны и является необходимым условием дальнейших их корректных измерений.
Техническим результатом предлагаемого способа обеспечения равенства угловых координат минимумов измеряемых сечений разностных ДН ФАР является реализация быстрого и практичного (не механического) способа приведения системы ОПУА-ФАР в точки точного пеленга на все направления, по которым в дальнейшем будут измерены компоненты УОП. Сущность предлагаемого способа измерения пеленгационных ошибок систем антенна-обтекатель радиолокационной станции, заключается в измерении углового смещения пространственного положения минимума, формируемого разностными ДН антенны на заданных углах поворота ее по азимуту и крену и определении пеленгационных ошибок в зависимости от этих углов. До установки обтекателя азимутальная плоскость сканирования опорно-поворотного устройства антенны с установленной на ней на угле крена Ψj - ФАР, юстируется таким образом, чтобы азимутальная плоскость сканирования опорно-поворотного устройства антенны совпадала с горизонтальной плоскостью. После чего, луч ФАР устанавливается по координатам  и
и  вводимым в блок управления лучом ФАР и рассчитываемым по выбранному нами углу крена Ψj, и произвольному углу отклонения луча от нормали θoi из всего возможного диапазона отклонений луча для конкретной ФАР по формулам
вводимым в блок управления лучом ФАР и рассчитываемым по выбранному нами углу крена Ψj, и произвольному углу отклонения луча от нормали θoi из всего возможного диапазона отклонений луча для конкретной ФАР по формулам  что делает возможным, путем азимутального сканирования ОПУА от центрального угла (-θoi), одновременно измерить горизонтальные сечения обеих разностных ДН, после чего все измерения повторяются на других выбранных нами углах крена ФАР, а после установки обтекателя и проведении соответствующих измерений по тем же, что и до его установки углам крена и углам отклонения луча от нормали, по изменившимся угловым координатам минимумов в сечениях разностных ДН системы ФАР-обтекатель, соответствующие составляющие пеленгационной ошибки в координатах αх и αу, вносимые обтекателем на углах Ψj, θoi установки системы ФАР-обтекатель, могут быть рассчитаны по формулам:
что делает возможным, путем азимутального сканирования ОПУА от центрального угла (-θoi), одновременно измерить горизонтальные сечения обеих разностных ДН, после чего все измерения повторяются на других выбранных нами углах крена ФАР, а после установки обтекателя и проведении соответствующих измерений по тем же, что и до его установки углам крена и углам отклонения луча от нормали, по изменившимся угловым координатам минимумов в сечениях разностных ДН системы ФАР-обтекатель, соответствующие составляющие пеленгационной ошибки в координатах αх и αу, вносимые обтекателем на углах Ψj, θoi установки системы ФАР-обтекатель, могут быть рассчитаны по формулам:


где:
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установки луча ФАР по координатам θ=θoi; Ψ=Ψj.
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установки луча ФАР по координатам θ=θoi; Ψ=Ψj.
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны.
θai - измеренный, после установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы при установки луча ФАР по координатам θ=θoi; Ψ=Ψj;
θyi - измеренный, после установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установки луча ФАР по координатам θ=θoi; Ψ=Ψj,
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву, на котором, до установки обтекателя, измеряемые минимумы горизонтальных сечений разностных диаграмм - совпадают.
Новыми признаками, позволяющими достичь заявляемый технический результат являются: до установки обтекателя на ФАР расположенной на угле крена Ψj с пространственным углом отклонения луча θoi, дополнительно осуществляют азимутальное сканирование ОПУА в области угла (-θoi), и одновременно измеряют координаты минимума -  сечения разностной азимутальной ДН и координаты минимума -
сечения разностной азимутальной ДН и координаты минимума -  разностной угломестной ДН, вычисляют компенсирующие добавки
разностной угломестной ДН, вычисляют компенсирующие добавки  и
и  рассчитываемые по формулам:
рассчитываемые по формулам:


где:
 - компенсирующая добавка, к координате начального фазирования решетки по углу αх при установки луча ФАР по координатам θ=θoi; Ψ=Ψj до установки РПО;
- компенсирующая добавка, к координате начального фазирования решетки по углу αх при установки луча ФАР по координатам θ=θoi; Ψ=Ψj до установки РПО;
 - компенсирующая добавка, к координате начального фазирования решетки по углу αу при установки луча ФАР по координатам θ=θoi; Ψ=Ψj до установки РПО;
- компенсирующая добавка, к координате начального фазирования решетки по углу αу при установки луча ФАР по координатам θ=θoi; Ψ=Ψj до установки РПО;
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву;
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны;
 - измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы, при установки луча ФАР по координатам θ=θoi; Ψ=Ψj;
- измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы, при установки луча ФАР по координатам θ=θoi; Ψ=Ψj;
 - измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установки луча ФАР по координатам θ=θoi; Ψ=Ψj,
- измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установки луча ФАР по координатам θ=θoi; Ψ=Ψj,
изменяют начальные координаты фазирования решетки  путем добавления к ним рассчитанных компенсационных добавок, для всех возможных для данной ФАР углов отклонения луча от нормали θoi и углов установки ее по крену Ψj, а после перефазирования ее по скорректированным данным и повторного измерения координат минимумов горизонтальных сечений обеих разностных ДН в области углов (-θoi), уже устанавливают РПО на ФАР и проводят измерение величин θai, θyi и расчет пеленгационных ошибкок, вносимых обтекателем, по приводимым ранее формулам.
путем добавления к ним рассчитанных компенсационных добавок, для всех возможных для данной ФАР углов отклонения луча от нормали θoi и углов установки ее по крену Ψj, а после перефазирования ее по скорректированным данным и повторного измерения координат минимумов горизонтальных сечений обеих разностных ДН в области углов (-θoi), уже устанавливают РПО на ФАР и проводят измерение величин θai, θyi и расчет пеленгационных ошибкок, вносимых обтекателем, по приводимым ранее формулам.
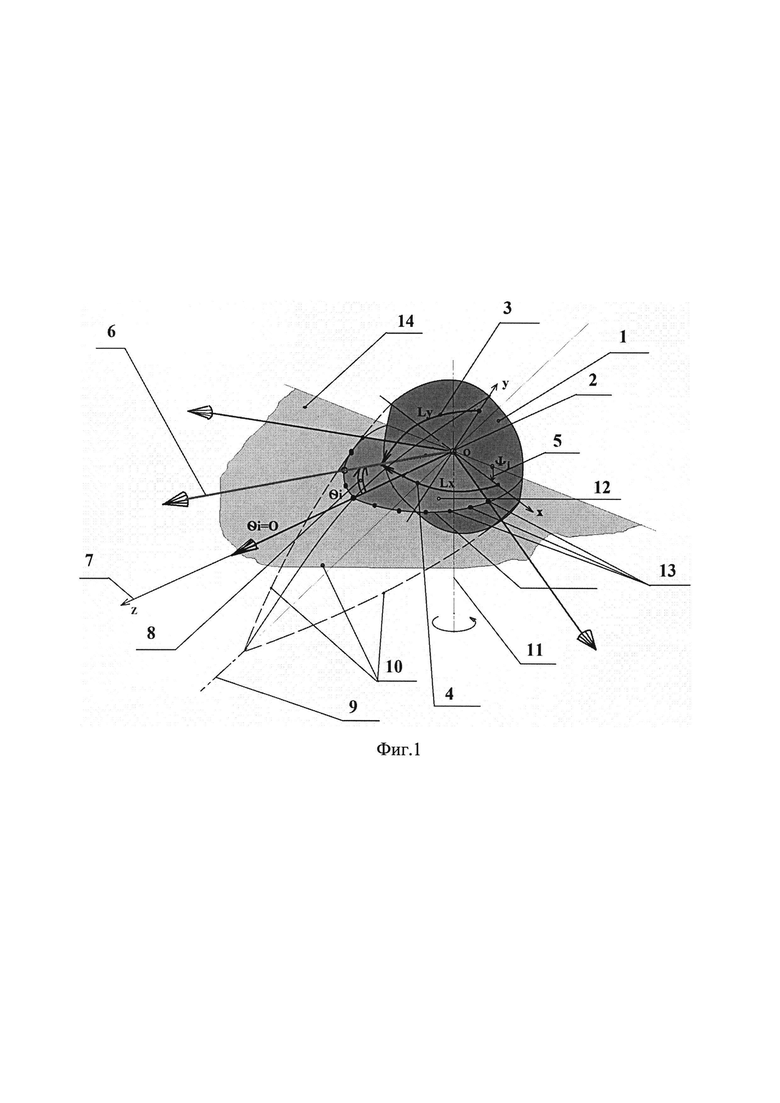
На фиг. 1 схематично показана антенна с обтекателем, размещенная на ОПУА, где:
1 - раскрыв антенны;
2 - центр сферической системы координат антенны (θ, ϕ) и связанной с ним декартовой системы (X, Y, Z);
3 - управляющий угол Lx в системе координат антенны (X, Y, Z) между осью X направлением одной из возможных установок луча ФАР;
4 - управляющий угол Ly в системе координат антенны (X, Y, Z) между осью Y и направлением одной из возможных установок луча ФАР;
5 - угол Ψj установки антенны по крену (он же угол ϕ в сферической системе координат антенны);
6 - направление одной из возможных установок луча ФАР, в горизонтальной плоскости сканирования ОПУА;
7 - нормаль к раскрыву антенны;
8 - текущее значение угла θi, между нормалью к раскрыву ФАР и направлением одной из возможных установок луча (он же угол θ в сферической системе координат АС);
9 - условная ось обтекателя;
10 - условные контуры поверхности обтекателя;
11 - ось азимутального поворота ОПУА с установленной системой ФАР-обтекатель;
12 - плоскость сечения поверхности обтекателя (при угле крена Ψj), параллельная с горизонтальной плоскостью азимутального поворота ОПУА;
13 - условные точки на поверхности обтекателя, по которым измеряются составляющие УОП при угле крена Ψj;
14 - плоскость азимутального поворота ОПУА совпадающая с горизонтальной;
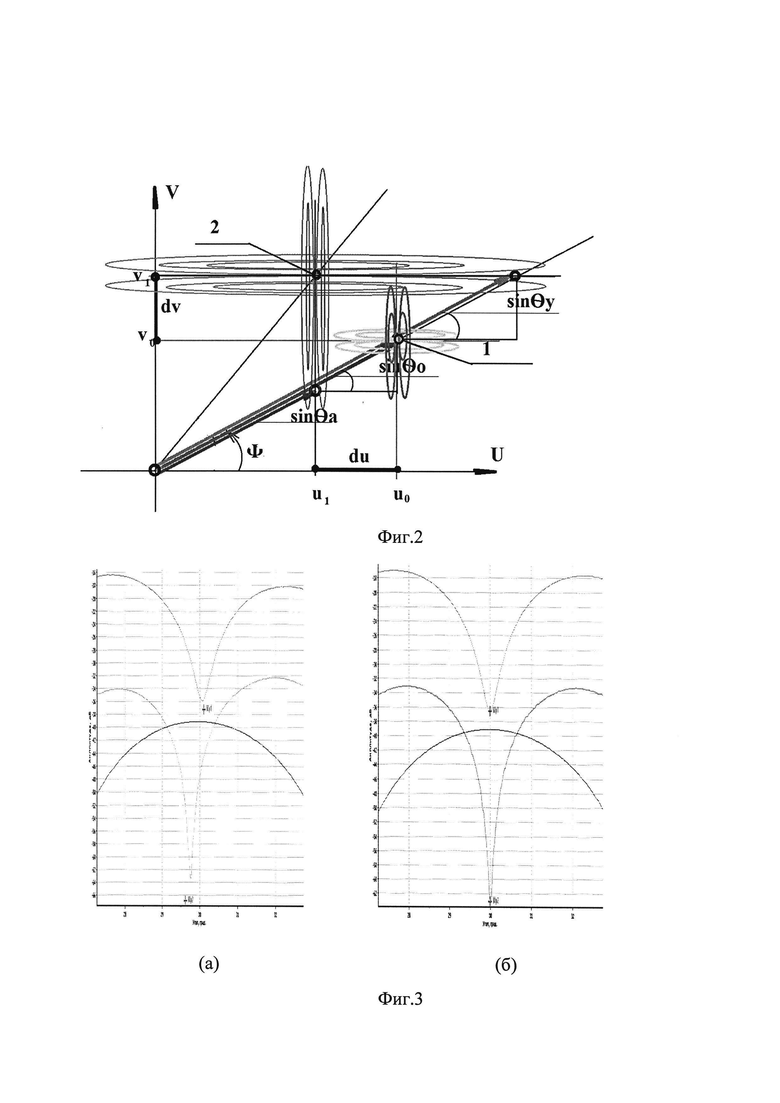
На фиг. 2 в системе координат направляющих косинусов (u, v) показаны сечения пространственных разностных ДН до (точка 2) и после (точка 1) компенсации механической погрешности установки на ОПУА ФАР на угле крена Ψ с лучом установленным на угол отклонения θi от нормали;
На фиг. 3 представлены фото сечений обеих разностных ДН экрана монитора измерительного комплекса до (а) и после (б) компенсации механической погрешности установки на ОПУА с установленной на угле крена Ψ ФАР;
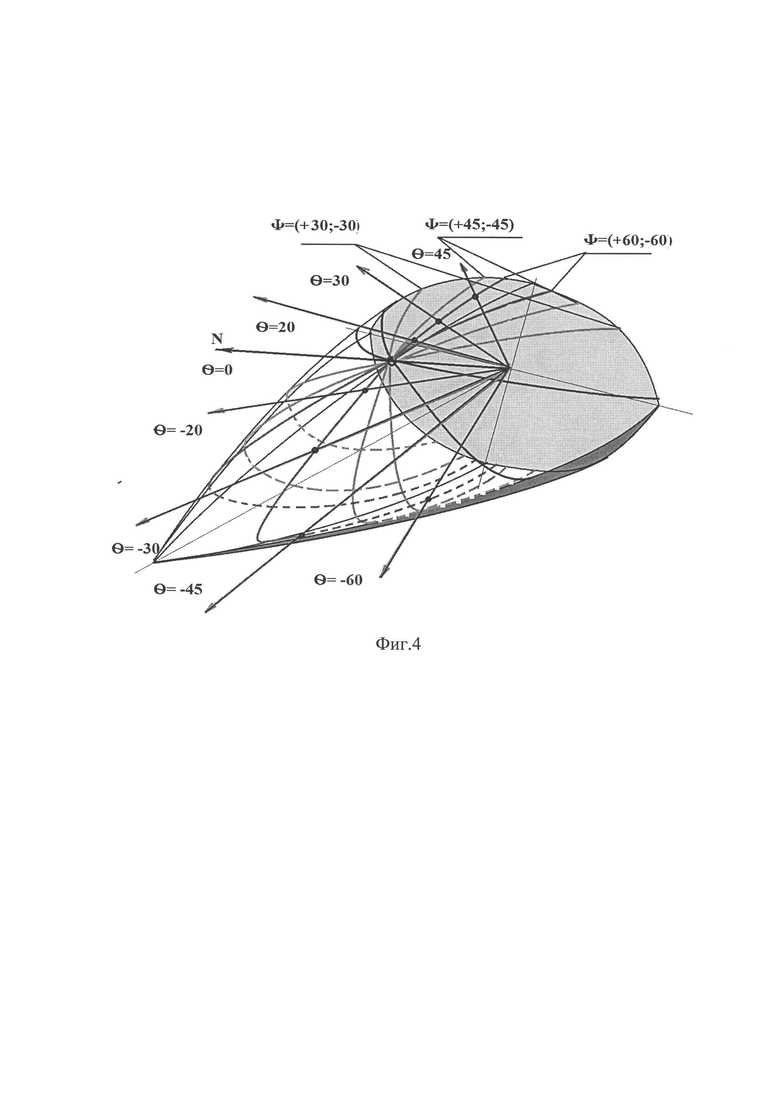
На фиг. 4 показан набор точек (соответствуют различным углам отклонения луча ФАР от нормали - θi) и по различным сечениям (соответствуют различным углам крена Ψ), по которым происходит измерение УОП и в которых выполняется процедура компенсации;
На фиг. 1 угловые координаты αх и αУ, передаваемые из вычислителя станции связаны с управляющими углами Lx; Ly и углами Ψ, θ сферической системы координат антенны соотношениями (1) и (2):


Известно также, что «линии нулевых уровней» ДН разностных каналов плоских ФАР, отображаются в системе координат направляющих косинусов (u, v) прямыми линиями вдоль осей u или v. На фиг. 2 схематически представлены разностные ДН в области сканирования луча ФАР, в системе координат направляющих (управляющих) косинусов (U=cosLx; V=cosLy) для двух случаев, до проведения процедуры компенсации и после, что соответствует двум характерным точкам на фиг. 2:
Точка 2 - одна из возможных точек с координатами (u1, v1), соответствует не точно установленному направлению на цель до проведения процедуры компенсации;
Точка 1-е координатами (u0, v0), соответствует установки луча ФАР по координатам θo, Ψ и точному пеленгу на цель после проведенной компенсации.
В этой точке измеряемые координаты минимумов обеих разностных ДН-совпадают;
Тогда учитывая (1-2), а так же то, что:





и


для одного из произвольных углов установки луча ФАР, при θ=θoi, Ψ=Ψj для компенсирующих добавок  (в системе координат переменных θ, Ψ) получим:
(в системе координат переменных θ, Ψ) получим:


где:
 - компенсирующая добавка, к координате начального фазирования решетки по углу αх при установки луча ФАР по координатам θ=θoi, Ψ=Ψj до установки РПО;
- компенсирующая добавка, к координате начального фазирования решетки по углу αх при установки луча ФАР по координатам θ=θoi, Ψ=Ψj до установки РПО;
- компенсирующая добавка, к координате начального фазирования решетки по углу αу при установки луча ФАР по координатам θ=θoi, Ψ=Ψj до установки РПО;
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву;
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны;
 - измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы, при установки луча ФАР по координатам θ=θoi, Ψ=Ψj,;
- измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы, при установки луча ФАР по координатам θ=θoi, Ψ=Ψj,;
 - измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установки луча ФАР по координатам θ=θoi, Ψ=Ψj;
- измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установки луча ФАР по координатам θ=θoi, Ψ=Ψj;
Измерение и последующий расчет составляющих компенсирующих добавок фиг. 1 производится следующим образом. ФАР (1) устанавливается на ОПУА на произвольный фиксированный угол крена Ψj - (5). При произвольно выбранном пространственном угле отклонения θi - (8), из возможного диапазона углов отклонения для данной ФАР, по формуле (1) рассчитываются управляющие углы Lx (3) и Ly (4), а по формуле (2) координаты фазирования ФАР - αх и αу. В дальнейшем, при фазировании ФАР по расчитываемым подобным образом координатам αx и αу, для различных значений угла θi, направление установки луча (6), каждый раз попадает в плоскость азимутального поворота ОПУА (2). В этом случае, при незначительном сканировании ОПУА по оси азимута (11), в области угла (-θi), одновременно могут быть измерены угловые координаты минимумов горизонтальных сечений обеих разностных диаграмм. Не идеальность механической системы позиционирования ФАР практически всегда приводит к несовпадению плоскости азимутального поворота ФАР, с горизонтальной в точках (13), где в последующем будет производится измерение составляющих УОП. При этом измеряемые минимумы разностных диаграмм - не совпадают, как показано на фиг. 3 (а). После проведения процедуры компенсации, заключающейся в вычислении по формулам (15)-(16) компенсирующих добавок  и прибавлении их начальным координатам фазирования решетки, на тех же углах установки, угловые координаты минимумов горизонтальных сечений обеих разностных диаграмм измеряются вновь. Если компенсирующие добавки были рассчитаны верно, то координаты минимумов разностных ДН совпадут, как показано на фиг. 3 (б).
и прибавлении их начальным координатам фазирования решетки, на тех же углах установки, угловые координаты минимумов горизонтальных сечений обеих разностных диаграмм измеряются вновь. Если компенсирующие добавки были рассчитаны верно, то координаты минимумов разностных ДН совпадут, как показано на фиг. 3 (б).
В дальнейшем, после проведенной компенсации и установки на ФАР РПО, по формулам (17)-(18), могут быть уже рассчитаны обе компоненты пеленгационной ошибки  и
и  (для углов αх, αу передаваемых в систему управления ФАР в координатах переменных θ, Ψ), вызванных установкой РПО.
(для углов αх, αу передаваемых в систему управления ФАР в координатах переменных θ, Ψ), вызванных установкой РПО.


где:
 - составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установки луча ФАР по координатам θ=θoi, Ψ=Ψj.
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установки луча ФАР по координатам θ=θoi, Ψ=Ψj.
 - составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установки луча ФАР по координатам θ=θoi, Ψ=Ψj.
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установки луча ФАР по координатам θ=θoi, Ψ=Ψj.
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву, на котором, до установки обтекателя, измеряемые минимумы горизонтальных сечений разностных диаграмм - совпадают.
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны.
θai - измеренный, после установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы при установки луча ФАР по координатам θ=θoi, Ψ=Ψj;
θуi - измеренный, после установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установке луча ФАР по координатам θ=θoi, Ψ=Ψj;
Подобные измерения могут быть проведены по всей поверхности обтекателя (в тех точках, где была проведена процедура компенсации) и, как показано на фиг. 4, при установке системы антенна-обтекатель на других углах крена и всем возможным, для конкретной ФАР, углам отклонения луча.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения пеленгационных ошибок системы антенна-обтекатель радиолокационной станции | 2019 |
|
RU2697883C1 |
| ИСПОЛЬЗОВАНИЕ ТРАНСФУНКЦИЙ ДЛЯ РЕШЕНИЯ АНТЕННЫХ ЗАДАЧ | 2012 |
|
RU2580443C2 |
| СИСТЕМА И СПОСОБ СЛЕЖЕНИЯ АНТЕННОЙ СИСТЕМЫ ЗЕМНОЙ СТАНЦИИ ПОДВИЖНОЙ СПУТНИКОВОЙ СВЯЗИ | 2023 |
|
RU2821956C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПАРАМЕТРОВ СХЕМЫ РАЗВЕДЕНИЯ ПЕЛЕНГАЦИОННЫХ ЛУЧЕЙ | 1989 |
|
SU1841118A1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| Способ юстировки зеркальной антенны по сигналам космических радиоизлучающих объектов | 2017 |
|
RU2667337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОМЕСТНОЙ КООРДИНАТЫ НИЗКОЛЕТЯЩЕЙ ЦЕЛИ | 2010 |
|
RU2444750C2 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| Способ формирования пеленгационных диаграмм направленности в антенне кругового электронного сканирования | 2018 |
|
RU2680729C1 |
Изобретение относится к радиолокационным устройствам и может быть использовано для измерения пеленгационных ошибок системы антенна - радиопрозрачный обтекатель бортовой радиолокационной станции. Сущность: способ измерения пеленгационных ошибок систем антенна-обтекатель заключается в измерении углового смещения пространственного положения минимума, формируемого разностными диаграммами направленности (ДН) антенны на заданных углах поворота ее по азимуту и крену, и определении пеленгационных ошибок в зависимости от этих углов. При этом до установки обтекателя на фазированной антенной решетке (ФАР), расположенной на угле крена Ψj с пространственным углом отклонения луча θoi, дополнительно осуществляют азимутальное сканирование опорно-поворотного устройства антенны в области угла (-θoi). Одновременно измеряют координаты минимума сечения разностной азимутальной диаграммы направленности (ДН) и координаты минимума разностной угломестной ДН. Вычисляют компенсирующие добавки. Изменяют начальные координаты фазирования решетки путем добавления к ним рассчитанных компенсационных добавок для всех возможных для данной ФАР углов отклонения луча от нормали и углов установки ее по крену. После перефазирования ее по скорректированным данным и повторного измерения координат минимумов горизонтальных сечений обеих разностных ДН в области углов (-θoi) устанавливают обтекатель на ФАР. Проводят измерение величин фактического угла минимума горизонтального сечения разностной азимутальной ДН и фактического угла минимума горизонтального сечения разностной угломестной ДН. Рассчитывают пеленгационные ошибки, вносимые обтекателем. Технический результат: обеспечение быстрого немеханического способа приведения системы ОПУА-ФАР в точки точного пеленга на все направления. 4 ил.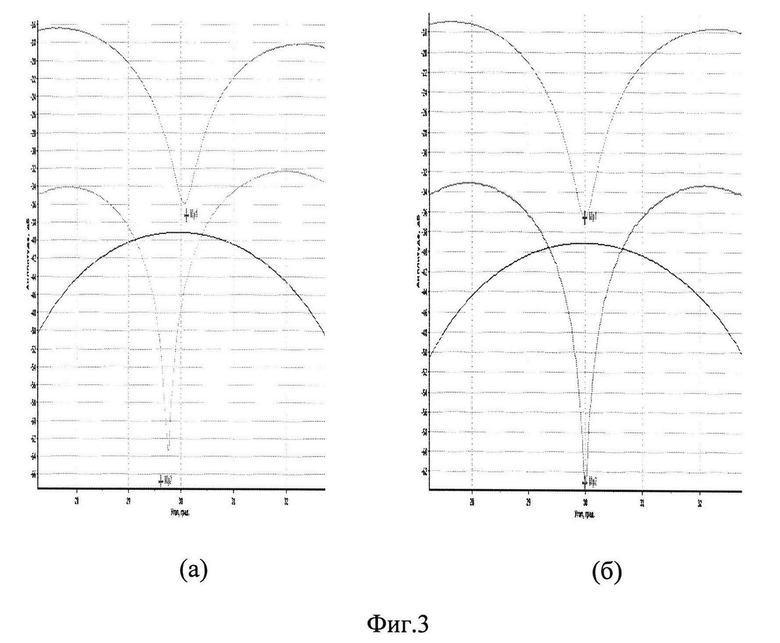
Способ измерения пеленгационных ошибок систем антенна-обтекатель радиолокационной станции, основанный на измерении углового смещения пространственного положения минимума, формируемого разностными диаграммами направленности (ДН) антенны на заданных углах поворота ее по азимуту и крену, и определении пеленгационных ошибок в зависимости от этих углов, при котором до установки обтекателя азимутальная плоскость сканирования опорно-поворотного устройства антенны (ОПУА) с установленной на ней на угле крена Ψj ФАР юстируется таким образом, чтобы азимутальная плоскость сканирования опорно-поворотного устройства антенны совпадала с горизонтальной плоскостью, после чего луч ФАР устанавливается по координатам  и
и  вводимым в блок управления лучом ФАР и рассчитываемым по выбранному нами углу крена Ψj и произвольному углу отклонения луча от нормали θoi из всего возможного диапазона отклонений луча для конкретной ФАР по формулам:
вводимым в блок управления лучом ФАР и рассчитываемым по выбранному нами углу крена Ψj и произвольному углу отклонения луча от нормали θoi из всего возможного диапазона отклонений луча для конкретной ФАР по формулам:

что делает возможным путем азимутального сканирования ОПУА от центрального угла (-θoi), одновременно измерить горизонтальные сечения обеих разностных диаграмм направленности, после чего все измерения повторяются на других выбранных нами углах крена ФАР, а после установки обтекателя и проведения соответствующих измерений по тем же, что и до его установки, углам крена и углам отклонения луча от нормали по изменившимся угловым координатам минимумов в сечениях разностных диаграмм направленности системы ФАР-обтекатель соответствующие составляющие пеленгационной ошибки в координатах αх и αу, вносимые обтекателем на углах Ψj, θoi установки системы ФАР-обтекатель, могут быть рассчитаны по формулам:


где:
 - составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αх при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
 - составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
- составляющая пеленгационной ошибки, вносимой обтекателем, по углу αу при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны;
θai - измеренный после установки обтекателя фактический угол минимума горизонтального сечения разностной азимутальной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
θyi - измеренный после установки обтекателя фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву, на котором до установки обтекателя измеряемые минимумы горизонтальных сечений разностных диаграмм совпадают;
и отличающийся тем, что до установки обтекателя на ФАР, расположенной на угле крена Ψj с пространственным углом отклонения луча θoi, дополнительно осуществляют азимутальное сканирование ОПУА в области угла (-θoi) и одновременно измеряют координаты минимума -  сечения разностной азимутальной ДН и координаты минимума -
сечения разностной азимутальной ДН и координаты минимума -  разностной угломестной ДН, вычисляют компенсирующие добавки
разностной угломестной ДН, вычисляют компенсирующие добавки  и
и  рассчитываемые по формулам:
рассчитываемые по формулам:


где:
 - компенсирующая добавка к координате начального фазирования решетки по углу αх при установке луча ФАР по координатам θ=θoi; Ψ=Ψj до установки радиопрозрачного обтекателя;
- компенсирующая добавка к координате начального фазирования решетки по углу αх при установке луча ФАР по координатам θ=θoi; Ψ=Ψj до установки радиопрозрачного обтекателя;
 - компенсирующая добавка к координате начального фазирования решетки по углу αу при установке луча ФАР по координатам θ=θoi; Ψ=Ψj до установки радиопрозрачного обтекателя;
- компенсирующая добавка к координате начального фазирования решетки по углу αу при установке луча ФАР по координатам θ=θoi; Ψ=Ψj до установки радиопрозрачного обтекателя;
θoi - одно из произвольно установленных текущих значений пространственного угла между направлением установки луча ФАР и нормалью к ее раскрыву;
Ψj - текущее заданное значение угла крена ФАР относительно горизонтальной плоскости азимутального сканирования опорно-поворотного устройства антенны;
 - измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
- измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной азимутальной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj;
 - измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
- измеренный, до установки обтекателя, фактический угол минимума горизонтального сечения разностной угломестной диаграммы при установке луча ФАР по координатам θ=θoi; Ψ=Ψj,
изменяют начальные координаты фазирования решетки  путем добавления к ним рассчитанных компенсационных добавок для всех возможных для данной ФАР углов отклонения луча от нормали θoi и углов установки ее по крену Ψj, а после перефазирования ее по скорректированным данным и повторного измерения координат минимумов горизонтальных сечений обеих разностных диаграмм направленности в области углов (-θoi), уже устанавливают радиопрозрачный обтекатель на ФАР и проводят измерение величин θai, θyi и расчет пеленгационных ошибок, вносимых обтекателем, по приводимым ранее формулам.
путем добавления к ним рассчитанных компенсационных добавок для всех возможных для данной ФАР углов отклонения луча от нормали θoi и углов установки ее по крену Ψj, а после перефазирования ее по скорректированным данным и повторного измерения координат минимумов горизонтальных сечений обеих разностных диаграмм направленности в области углов (-θoi), уже устанавливают радиопрозрачный обтекатель на ФАР и проводят измерение величин θai, θyi и расчет пеленгационных ошибок, вносимых обтекателем, по приводимым ранее формулам.
| Способ измерения пеленгационных ошибок системы антенна-обтекатель радиолокационной станции | 2019 |
|
RU2697883C1 |
| Способ крашения кож | 1959 |
|
SU126472A1 |
| ИЗМЕРИТЕЛЬ ПЕЛЕНГАЦИОННЫХ ХАРАКТЕРИСТИК СИСТЕМ АНТЕННА - ОБТЕКАТЕЛЬ | 2010 |
|
RU2442181C1 |
| JP 2011122892 A, 23.06.2011 | |||
| US 7119739 В1, 10.10.2006. | |||

