Изобретение относится к ручному устройству для нанесения слоя с подложки в виде пленки (далее подложка) на субстрат, снабженному органом нанесения, состоящей из выступающего из корпуса торца, через который проходит покрытая слоем подложка при ее перематывании с размоточной катушки на намоточную катушку и у которого имеются по контактной плоскости для возвратно-поступательного режима. Для нанесения слоя подложку можно прижимать к субстрату через контактную плоскость.
Такое устройство описано в заявке DE 3832163 A1. При этом орган нанесения состоит из головки, на свободном торце которой расположена тонкая планка, для обеспечения отрыва слоя без рваных кромок поперек продольного направления подложки. Это, например, выгодно для перевода покрывного слоя с подложки на субстрат. В качестве слоев используют в основном клеевые слои или покрывные слои.
Тонкая планка имеет контактную плоскость и обеспечивает равномерное прижатие покрытой слоем подложки к эластичному и/или неровному субстрату, как рабочей поверхности. Описанное устройство предназначено специально для нанесения слоя на рабочую поверхность путем возвратного движения.
Недавно на практике стали использовать и ручные устройства, предназначенные для нанесения слоя на рабочую поверхность путем возвратно-поступательного движения. Преимущество поступательного движения перед возвратным движением состоит в том, что в случае прецизионных операций, например, маскирующей заклейки текстов, вид на начало и конец подлежащей маскирующей заклейки части открытый и не закрытый ручным устройством.
Такое известное, соответствующее ограничительной части п. 1, устройство имеет корпус, из которого выступает головка, имеющая рулон для нанесения на свободном торце. Покрытую слоем переводную ленту перематывают с размоточной катушки на рулон для перевода слоя на субстрат. В зависимости от манипуляции ручного устройства, т.е. в зависимости от того, предусмотрено ли использование устройства путем возвратного или поступательного движения, ленту можно прижимать к субстрату через первую или вторую контактную плоскость. После нанесения слоя на субстрат пустую ленту наматывают на намоточную катушку.
Для возвратно-поступательного режима устройства требуется орган нанесения, который выполнен в основном симметричным, так как для изменения режима ручное устройство следует поворачивать на 180o и прижимать к субстрату через другую контактную плоскость. Так как при разматывании подложка должна приводить в действие размоточную катушку, ее сердечник и вращающуюся опору, а также проскальзывающую муфту, намоточную катушку, на которую наматывается пустая переводная лента, включая сердечник катушки и ее вращающуюся опору, наблюдаются вращающие моменты, которые должны преодолеваться прилипанием слоя к субстрату. Иначе слой отрывается и/или перематывание подложки прекращается.
Хотя рулон для нанесения хорошо пригодный для использования ручного устройства возвратно-поступательным движением, он не обеспечивает прямоугольного к продольному направлению подложки отрыва слоя без рваных кромок, который является желательным при нанесении покрывного слоя на субстрат и осуществляется путем использования планки в виде органа нанесения.
Испытанием планок установлено, что в зависимости от свойства прилипания слоя при его использовании необходима минимальная контактная плоскость между слоем и субстратом, которая определяется шириной и длиной части подложки, прижимающейся к субстрату. Кроме того, использование ручного устройства не должно быть ограничено фиксированным углом установки, а надежная функция устройства должна обеспечиваться индивидуально выбранным углом установки в определенном угловом диапазоне. Это достигается тем, что каждая контактная плоскость является предпочтительно округленной.
Известные на практике ручные устройства, которые выполнены для перевода слоя с переводной ленты на субстрат путем возвратно-поступательного движения, имеют планки с радиусом округления в 0,4 до 0,6 мм. Следовательно планки имеют толщину, которая исключает эластичное согласование с субстратом. Однако, так как радиус округления нельзя уменьшить до любого размера, преимущества планок ручного устройства, описанного в заявке DE 3832163 A1, как, например, эластичное согласование с неровным субстратом и точный отрыв слоя, не полностью достигаются рассчитанным на возвратно-поступательный режим ручным устройством, которое снабжено известной планкой или рулоном.
На основе вышеизложенного задачей данного изобретения является разработка улучшенного ручного устройства, которое обеспечивает равномерное нанесение слоя с подложки на субстрат, а также точный отрыв слоя как при возвратном, так и при поступательном режиме.
Задача решается использованием ручного устройства вышеописанного типа за счет того, что орган нанесения состоит из двух планок, которые имеют по одной контактной плоскости и между которыми находится промежуток.
Использование двух планок обеспечивает точный, прямоугольный к продольному направлению подложки отрыв слоя в конце желаемого пути нанесения, а также достаточно большой совместный радиус округления или окружности торцев обеих планок, дуга окружности которого перекрывает промежуток между планками, так что легко осуществляется возвратно-поступательное движение. С другой стороны предлагаемые планки могут быть такими тонкими, что их эластичность обеспечивает равномерное прижатие слоя к эластичному или неровному субстрату, причем компенсируются местные неровности.
Дальнейшее преимущество изобретения состоит в том, что при каждом режиме используется оптимально выполненная планка.
В выгодном варианте изобретения планки поддаются взаимной эластичной деформации. Таким образом достигается улучшенное и более удобное использование ручного устройства, так как согласование контактных плоскостей с субстратом улучшено. Следовательно всегда обеспечивается точное и равномерное прижатие подложки и следовательно и подающегося нанесению слоя даже к неровному субстрату. При этом не требуется большой силы для прижатия ручного устройства к субстрату. Таким образом пользователь может сосредоточиваться на манипуляцию ручного устройства и управление им, делая при этом менее ошибок.
Особенно экономичный вариант предлагаемого ручного устройства можно получать за счет того, что орган нанесения снабжен головкой, которая на своем свободном торце образует или переходит в обе планки, разделенные промежутком в виде зазора. Так головка может быть, например, прорезанной на своем торце. Поэтому при известных ручных устройствах следует лишь изменять органы нанесения выполненными вышеуказанным образом органами нанесения. Других изменений у ручного устройства или у отдельных компонентов не требуются. Так прорезанная головка может иметь в основном те же размеры и формы как известные непрорезанные головки. Кроме того, изготовление прорезанной головки не требует дополнительных производственных расходов, а даже приводит к более экономичному использованию материалов. При этом головка с обеими планками может быть цельной или составной. Предлагаемое устройство может быть идентичным с известным устройством, различаясь лишь зазором, причем предлагаемое устройство обеспечивает, что сравнимая по функции с уровнем техники головка дополнительно обладает преимуществом эластичного согласования с субстратом и точного отрыва слоя при обоих режимах. При соответствующем выполнении изобретения радиусу округления известной головки соответствует радиус окружности, который получается постоянным в основном продолжением по зазору концевой кривизны или округлений обеих неиспользуемых планок.
Другая выгодная альтернатива по отношению к разрезанной головке состоит в том, что орган нанесения снабжен двумя отдельными головками, которые на своих свободных торцах образуют по одной планке. Этот вариант включает дополнительные возможности выполнения и расположения головок, а также выбора материала для головок так, что возможно дальнейшее согласование с специфичными требованиями каждого режима.
Для обеспечения компактности и простого управления предлагаемым ручным устройством выгодно и поэтому предпочтительно регулировать расстояние планки от корпуса по крайней мере одной головкой. Таким образом можно простым способом обеспечивать согласование ручного устройства с индивидуальными требованиями пользователя и/или возвратно-поступательным режимом. Можно в целом регулировать угол установки планки (планок) и таким образом контактных плоскостей, а также расстояние планки (планок) от корпуса.
Например, этот вариант изобретения может быть снабжен двумя головками, симметрично расположенными по отношению к средней плоскости, проходящей параллельно по отношению к промежутку (зазору). Через планки этих головок перематывается подложка вне корпуса. Таким образом, при каждом режиме, т.е. при возвратном или поступательном движении, применяется оптимально выполненная планка.
При ручном устройстве, снабженном двумя головками, особенно выгодно, если регулирование расстояний планок от корпуса обеспечивается связанным движением в противоположных направлениях. Таким образом, предназначенную для соответствующего режима, т.е. для возвратного или поступательного движения, головку можно приводить в оптимальную позицию путем выдвигания или выкидывания, а другую головку можно тянуть обратно или откидывать, чтобы она не мешала нанесению слоя и не закрывала вид на место обработки и нанесения. Благодаря связанному регулированию требуется лишь одна манипуляция для изменения режима.
При связанном передвижении двух головок в противоположном направлении особенно выгодно, если оно осуществляется синхронно, причем пути передвижения обеих планок одинаковые, но в противоположном направлении. Одинаковый путь передвижения обеих головок обеспечивает, что при каждом режиме перематывающаяся через головки переводная лента надежно прилегает к планкам и их контактным плоскостям, так как в результате синхронного передвижения длина пути переводной ленты от размоточной катушки до намоточной катушки остается константной. Вследствие этого переводная лента не ослабеет и не соскальзывает с планок.
Если головки расположены в основном параллельно по отношению друг к другу и не являются передвижными по отношению к корпусу, т.е. если их нельзя перемещать, в частности если они имеют ту же длину, в зависимости от их положения при одном или обоих режимах вид на место обработки может закрываться соответственной неактивной головкой. Соответственной комбинацией вышеуказанных вариантов изобретения можно получать, например, ручное устройство, головки которого можно параллельно перемещать друг относительно друга так, что вид на место обработки всегда открытый.
Для регулирования головок и планок предлагаемое ручное устройство предпочтительно снабжено механизмом переключения, которым можно в самом простом случае управлять вручную. Принципиально устройство может содержать и автоматику, которая регулирует головки и планки в зависимости от положения ручного устройства. Предохранение позиции, которое осуществляется при ручном использовании, например фиксацией или блокировкой, достигается при автоматическом режиме, например, посредством сдвигающихся в зависимости от положения устройства зажимных клинов.
Ручная манипуляция механизма переключения осуществляется, например, поворотным выключателем или задвижкой. Для определения выбранной позиции выключатель или задвижка могут иметь пригодные маркировки, например, стрелку, которая облегчает эксплуатацию, причем выключатель или задвижка сами могут быть выполнены в виде стрелки.
Для передвижения каждой головки механизм переключения содержит, предпочтительно, кулисный рычаг, который представляет собой направляющую для установленного на головке выступа, с которым он находится в скользящем зацеплении. Таким образом можно особенно легко превращать поворотное или передвигающее движение, например рукоятки или выключателя на наружной стороне устройства, в движение перемещения головки или головок, причем точный ход движения и время этого движения определены кулисной направляющей.
Если передвижение головок обеспечивается одинаковым действием кулисных рычагов в противоположном направлении, в частности если пути передвижения одинаковые, что предусматривается в одном предпочтительном варианте изобретения, переводная лента в конечном положении обоих режимов и, в частности, вовремя передвижения головки или головок всегда остается туго натянутой.
Кроме того, для возвратно-поступательного режима корпус ручного устройства выполнен предпочтительно в основном симметричным, благодаря чему его можно выгодно, легко и надежно держать и управлять им при каждом режиме.
Согласно данным изобретения свободный торец органа нанесения можно выполнять так, чтобы торцы обеих планок и промежуток между ними находились на совместном радиусе окружности, составляющем предпочтительно 0,4 до 0,6 мм. Таким образом, получают эмпирически определенные оптимальные размеры предлагаемого ручного устройства для возвратно-поступательного режима, обеспечивающие хорошее перематывание подложки, а также надежное нанесение слоя на субстрат при каждом режиме. Радиус окружности соответствует радиусу округления, который согласно уровню техники должен иметь такие параметры, чтобы обеспечивать достаточную контактную плоскость подложки или слоя с субстратом при индивидуально определяемых углах установки ручного устройства.
Кроме того, для оптимизации использования ручного устройства и управления им выгодно выполнять контактную плоскость одной планки специфично для возвратного режима, а контактную плоскость другой планки специфично для поступательного режима.
Ниже сущность изобретения поясняется более подробно чертежами.
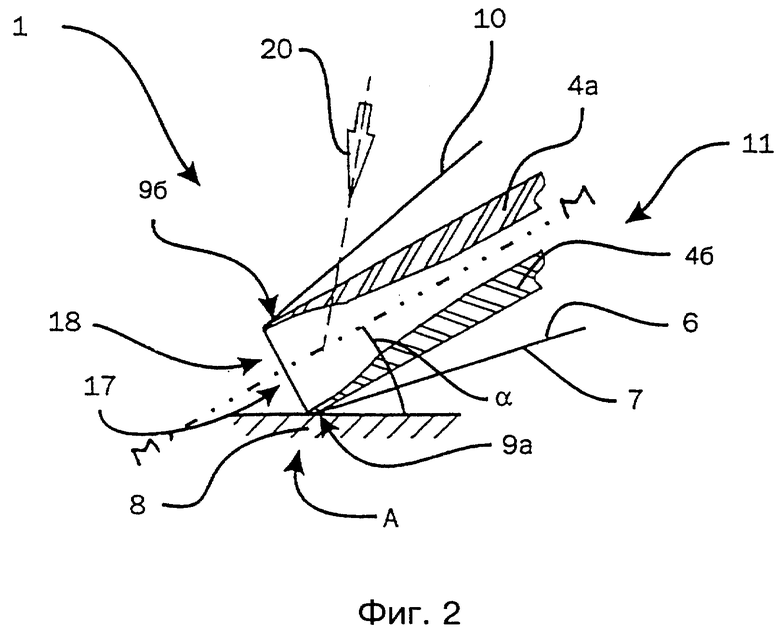
Фиг. 1 показывает схематическое боковое изображение органа нанесения в продольном разрезе согласно первому варианту предлагаемого ручного устройства.
Фиг. 2 показывает схематическое боковое изображение органа нанесения в продольном разрезе согласно второму варианту предлагаемого ручного устройства.
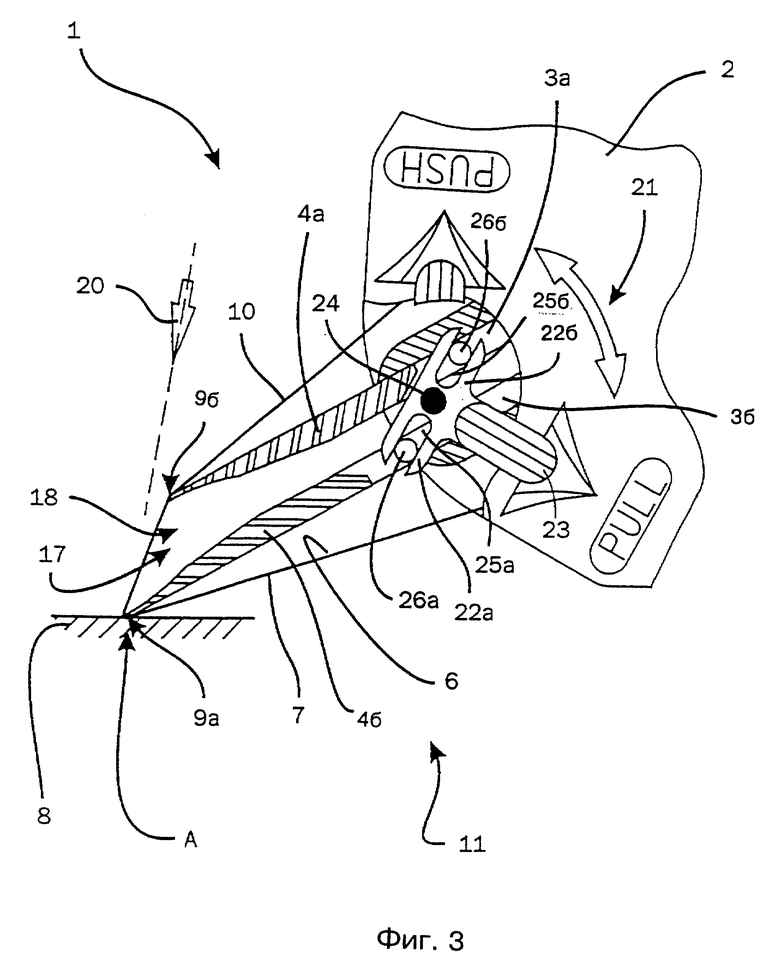
Фиг. 3 показывает расширенное схематическое боковое изображение варианта согласно фиг. 2 в продольном разрезе.
На всех фигурах каждая деталь имеет ту же маркировку, так что отдельные детали ручного устройства и их функции будут ясны из фигуры, даже если в описании не определяется каждая деталь и ее функция, указанная на фигурах.
На фиг. 1 изображен орган нанесения 1 не указанного более подробно ручного устройства с головкой 3, которая имеет в передней части 11 две интегрально выполненные планки 4а и 4б, разделенные промежутком 18 в виде зазора 17. Для нанесения слоя 7 с подложки 6 на субстрат 8 торец 11 органа нанесения 1 выступает из корпуса 2 (см. фиг. 3). Разматывающаяся с (не указанной) размоточной катушки подложка 6 проходит через орган нанесения 1, где она меняет направление, и наматывается в области 10 на (не указанную) намоточную катушку в корпусе. Для использования ручного устройства возвратно-поступательным движением на переднем свободном торце обеих планок 4а и 4б предусмотрены по одной контактной плоскости 9а и 9б, через которые можно прижимать подложку 6 к субстрату 8 для нанесения слоя 7.
Свободные торцы обеих планок 4а и 4б на фиг. 1 имеют округленную форму, причем округления находятся на одном совместном радиусе окружности R, который составляет 0,4 до 0,6 мм.
Выгодно выполнять зазор 17 достаточно узким, чтобы при прижатии головки 3 к субстрату 8 торец 11 головки 3 не подвергался такой сильной деформации или сужению и чтобы, следовательно, подложка 6 достаточно надежно переходила через планки 4а и 4б и не соскальзывала сбоку с головки 3.
Округления 16 обеспечивают согласование контактных плоскостей 9а, 9б с углом установки α, чему способствуют гибкость и эластичность планок 4а, 4б. Таким образом ручное устройство может всегда держаться удобным каждому пользователю образом и одновременно обеспечивается хорошее нанесение слоя 7.
Обе планки 4а, 4б являются эластичными при давлении не только на своих тонких свободных торцах, т.е. в области округлений, а они поддаются деформации во всей области зазора 17. Таким образом компенсируется различная, зависящая от пользователя интенсивность давлений прижима, причем в каждом случае неактивная планка 4б, 4а ограничивает ход другой планки 4а или 4б, деформированной давлением. При необходимости в другом варианте изобретения можно использовать отдельный упор (не указан) для головок.
Ручное устройство снабжено корпусом 2, который в основном выполнен так симметричным, что как при возвратном, так и при поступательном режиме его положение в руке пользователя одинаковое. Для изменения режима пользователь, держащий ручное устройство при возвратном режиме, например, в правой руке, может брать устройство в левую руку, причем не изменяются положение и направление. Затем держа ручное устройство в левой руке, пользователь поворачивает его против часовой стрелки до тех пор, пока не станет возможным нанесение слоя поступательным режимом. При этом для прижатия подложки 6 к субстрату 8 используется не контактная плоскость 4а, а контактная плоскость 4б. Для этого головка 3 выполнена в основном симметричной (как и корпус 2).
Благодаря округлениям 16 ручное устройство в области контактных плоскостей выполнено так, что одна планка 4а особенно согласована с возвратным режимом, а другая планка 4б особенно согласована с поступательным режимом. В отличие от использования рулона применение планок 4а и 4б обеспечивает точный отрыв слоя 7 поперек хода подложки в конце пути нанесения слоя. При этом планки 4а и 4б могут быть такими тонкими, что обеспечивается равномерное нанесение слоя даже на неровный субстрат 8.
На фиг. 2 и 3 подробно изображен другой вариант органа нанесения 1.
Фиг. 2 показывает переднюю область 11 органа нанесения 1 с двумя головками 3а и 3б, которые разделены в направлении хода подложки 6 промежутком 18, выполненным, например, в виде зазора 17. Каждая из обеих головок 3а и 3б образует планку 4а и 4б. Планки 4а и 4б имеют контактные плоскости 9а и 9б, через которые можно прижимать подложку 6 к субстрату 8 для нанесения слоя. Планки 4а и 4б сами являются такими гибкими, что они могут компенсировать неровности субстрата 8. Для этого планки 4а и 4б являются тонкими, что обеспечивается сужением продольного разреза планок 4а и 4б в направлении хода переводной ленты (см. фиг. 2 и 3). При этом промежуток 18 расширяется в конце планок 4а и 4б. Это выполнение является лишь примером, так как необходимая гибкость планок достигается и другими формообразующими мероприятиями или другим материалом и комбинациями материалов. В частности головки 3а и 3б и планки 4а и 4б могут быть цельными или составными.
Обе планки 4а и 4б представляют собой часть головки 3а или 3б и поддаются взаимной эластичной деформации. Таким образом также компенсируются различные интенсивности давлений прижима к субстрату 8, так что соответственно выполненное ручное устройство может применяться пользователями при различном давлении и одновременно выполнять оптимальную функцию.
Обе головки 3а и 3б расположены симметрично по отношению к средней оси M-M зазора 17, причем они снабжены планкой 4а или 4б, которые обе оптимально выполнены для специфичного режима, т.е. для возвратного или поступательного режима.
Орган нанесения 1 с двумя отдельными головками 3а и 3б имеет больше возможностей согласования и регулирования, чем орган нанесения с лишь одной головкой (фиг. 1). Эти возможности описываются ниже.
В отличие от варианта, указанного на фиг. 1, головки 3а и 3б из фиг. 2 и 3 на торцах своих планок 4а и 4б не имеют округлений, которые рассчитаны на различные углы α установки ручного устройства. В данном случае торцы планок 4а и 4б являются такими тонкими, что они легко поддаются деформации под давлением прижима к субстрату 8. Таким образом также возможен широкий диапазон углов α установки ручного устройства по отношению к субстрату 8. При этом в зависимости от конкретного выполнения планок 4а и 4б использованная контактная плоскость 9а или 9б может быть большей, чем при выполнении с округленными планками 16 (см. фиг. 1), которые в случае твердого субстрата образуют почти лишь контактную линию поперек хода переводной ленты. Однако это является принципиально достаточным для надежной функции ручного устройства.
Указанной деформацией планок 4а и 4б при каждом прижатии устройства к субстрату 8 образуется также округление, которое не должно быть таким равномерным, как округления 16 на фиг. 1.
На фиг. 3 указан вариант ручного устройства, головки 3а и 3б которого можно регулировать по отношению к расстоянию торцев соответственной планки 4а или 4б от корпуса 2. Регулирование расстояний планок 4а и 4б от корпуса 2 обеспечивается связанным движением в противоположных направлениях. Так, если, например, расстояние планки 4а от корпуса 2 увеличивается, то автоматически и предпочтительно синхронно уменьшается расстояние другой планки 4б от корпуса 2.
Таким образом можно устанавливать два режима, т.е. возвратный или поступательный режим, причем вид на место обработки A, например на место исправления, является все время открытым. При каждом режиме одна из головок 3а и 3б выступает длиннее из корпуса 2, чем другая головка 3б или 3а.
Сравнение фиг. 2 и 3 поясняет этот эффект. На фиг. 2 стрелка 20 указывает на направление взгляда пользователя. Очевидно, что находящаяся над планкой 4а планка 4б закрывает вид на место обработки A. Согласно изображению на фиг. 2 пользователь должен был бы глядеть наискось слева под планку 4б, чтобы иметь вид на место обработки A. Держать голову таким образом является затруднительным и отрицательно влияло бы на способность пользователя сосредоточиваться. Кроме того, на месте обработки A, закрытом планкой 4б, нет оптимального освещения, что в целом затрудняет использование устройства.
В отличие от этого указанная на фиг. 3 возможность регулирования планок 4а и 4б обеспечивает беспрепятственный вид на место обработки A, а также оптимальное освещение. Часть головки 3б с планкой 4б находится внутри корпуса 2 так, что планка 4а и, в частности свободный торец уже не закрыт головкой 3б, и указанное стрелкой 20 направление взгляда до контактной линии между субстратом 8 и планкой 4а не является закрытым.
Хотя это необязательно, но беспрепятственный вид на место обработки обеспечивается тем, что при втягивании планки 4б в корпус 2 из корпуса 2 одновременно вытягивается планка 4а. Обе планки 4а и 4б и, следовательно, и обе головки 3а и 3б перемещаются параллельно по отношению друг к другу. Благодаря регулированию головок 3а и 3б требуются относительно короткие пути передвижения, чтобы иметь беспрепятственный вид на место обработки A при каждом режиме. Поэтому в корпусе 2 не требуется большого места для помещения втянутой головки 3а или 3б. Однако беспрепятственный вид на место обработки A достигается также, если втягивают в корпус 2 или вытягивают из корпуса 2 лишь одну головку 3а или 3б. В таком случае путь передвижения головки в корпусе 2 должен был быть длиннее.
Вместо параллельного передвижения обеих головок 3а и 3б по отношению друг к другу соответствующее регулирование достигалось бы и поворотом головки 3, 3а или 3б или обеих головок 3а и 3б. Регулирование и принципиальное передвижение обеих головок 3а и 3б могут осуществляться связанным движением или отдельными движениями. Возможна также комбинация передвижения и поворота, причем следует учесть, что прежде всего при поступательном режиме, пригодном для точного позиционирования и манипуляции ручного устройства 1, вид на место обработки A должен быть как можно более открытым.
Указанный на фиг. 3 вариант предусматривает механизм переключения 21, снабженную кулисным рычагом 22а, 22б для перемещения головки 3а, 3б. Оба кулисных рычага 22а и 22б интегрально связаны с выключателем 23 и установлены с возможности поворота на оси 24, которая находится посредине обоих кулисных рычагов 22а и 22б, которые в свой очередь расположены перпендикулярно к перестановочному рычагу 23 выключателя.
Расположенные друг к другу по зеркальному изображению кулисные рычаги 22а и 22б в общем идентичны. Вследствие этого поворотом выключателя 23 вокруг оси 24 они имеют одинаковое действие в противоположном направлении, т.е. управлением выключателем 23 пути передвижения головок 3а и 3б одинаковые, но в противоположном направлении. Так, переключение выключателя 23 приводит к одновременному, автоматическому и синхронному втягиванию головки 3а или 3б в корпус и вытягиванию другой головки 3б или 3а из корпуса, причем путь передвижения одинаковый. Таким образом, переводная лента или подложка 6 остается туго натянутой во время переключения, а также в конечных положениях, соответствующих обоим режимам.
Каждый кулисный рычаг 22а, 22б снабжен кулисной канавкой 25а или 25б, которая проходит в его продольном направлении. У каждой из головок 3а и 3б образуется кулачок, который сбоку заходит в соответствующую кулисную канавку. Так как выключатель является поворотным выключателем поворотные движения выключателя 23 переводятся в движения перемещения головок 3а и 3б. Управлением выключателем 23 оба кулисных рычага 22а и 22б поворачиваются в противоположном направлении вокруг совместной оси 24 и захватывают с собой соответствующий кулачок 26а или 26б по кулисной канавке 25а и 25б. Это приводит к эквидистантному параллельному передвижению головок 3а и 3б в противоположном направлении.
Выключатель 23 выполнен в виде указателя и в каждом из своих конечных положений он показывает на находящееся на поверхности корпуса стреловидное изображение, которое в свою очередь указывает на находящееся на поверхности корпуса указание на установленный режим. В качестве указаний на режим в поверхности корпуса вформованы слова PULL для возвратного режима, а PUSH для поступательного режима. Стреловидные изображения также вформованы в поверхности корпуса. Таким образом, перед применением ручного устройства пользователь может легко узнавать, какой режим установлен. Так, он не рискует использовать ручное устройство 1 возвратным движением, хотя установлен поступательный режим.
На фигурах контактные плоскости 4а и 4б имеют идентичное изображение. Однако это необязательно. Например, возможно также согласование контактной плоскости 4а или 4б планки 3а или 3б с требованиями возвратного режима, а согласование контактной плоскости 4б или 4а другой планки 3б или 3а с требованиями поступательного режима.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСЛОЙНАЯ ГИБКАЯ ПЕРЕВОДНАЯ ЛЕНТА | 1996 |
|
RU2155676C2 |
| ПРИБОР ДЛЯ ПЕРЕНОСА НА СУБСТРАТ НАНЕСЕННОГО НА ЛЕНТОЧНЫЙ НОСИТЕЛЬ В ВИДЕ ПЛЕНКИ МАТЕРИАЛА | 1999 |
|
RU2204525C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА НАНЕСЕННОГО В ФОРМЕ ПЛЕНКИ НА НЕСУЩУЮ ЛЕНТУ МАТЕРИАЛА НА ПОДЛОЖКУ | 1999 |
|
RU2204524C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕНОСА НА ПОДЛОЖКУ НАНЕСЕННОГО В ФОРМЕ ПЛЕНКИ НА НЕСУЩУЮ ЛЕНТУ МАТЕРИАЛА | 2001 |
|
RU2247692C2 |
| МЕХАНИЗМ ПРИВОДА СЕРДЕЧНИКА НАМАТЫВАЕМОЙ КАТУШКИ ДЛЯ ПЕРЕВОДНОЙ ЛЕНТЫ ПЕРЕВОДНОГО РАЗДАТОЧНОГО УСТРОЙСТВА | 1997 |
|
RU2181337C2 |
| УСТРОЙСТВО СТОЛА ДЛЯ 3D-ПЕЧАТИ С АВТОМАТИЧЕСКОЙ КОНВЕЙЕРНОЙ СИСТЕМОЙ СЪЕМА ДЕТАЛЕЙ | 2022 |
|
RU2786718C1 |
| ЧЕРНИЛЬНОЕ СТРУЙНОЕ ЗАПИСЫВАЮЩЕЕ УСТРОЙСТВО | 1987 |
|
SU1825096A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ИНСТРУМЕНТАЛЬНОЙ РАМЫ НА РЕЛЬСЫ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1991 |
|
RU2015240C1 |
| Установка карусельного типа для магнетронного напыления многослойных покрытий и способ магнетронного напыления равнотолщинного нанопокрытия | 2015 |
|
RU2606363C2 |
| Устройство для изготовления сеток | 1971 |
|
SU576020A3 |
Изобретение относится к ручному устройству для нанесения слоя с подложки в виде пленки на субстрат. Устройство снабжено органом нанесения, состоящим из выступающего из корпуса торца, через который проходит подложка при ее перематывании с размоточной катушки на намоточную катушку. Выступающий торец имеет контактные плоскости для возвратно-поступательного режима. Для нанесения слоя подложку можно прижимать к субстрату через одну или другую контактную плоскость. При этом орган нанесения снабжен двумя разделенными промежутком планками, которые имеют по одной из обеих контрактных плоскостей. Устройство обеспечивает повышение равномерности нанесения слоя с подложки на субстрат и точный отрыв слоя как при возвратном, так и при поступательном режиме. 11 з.п.ф-лы, 3 ил.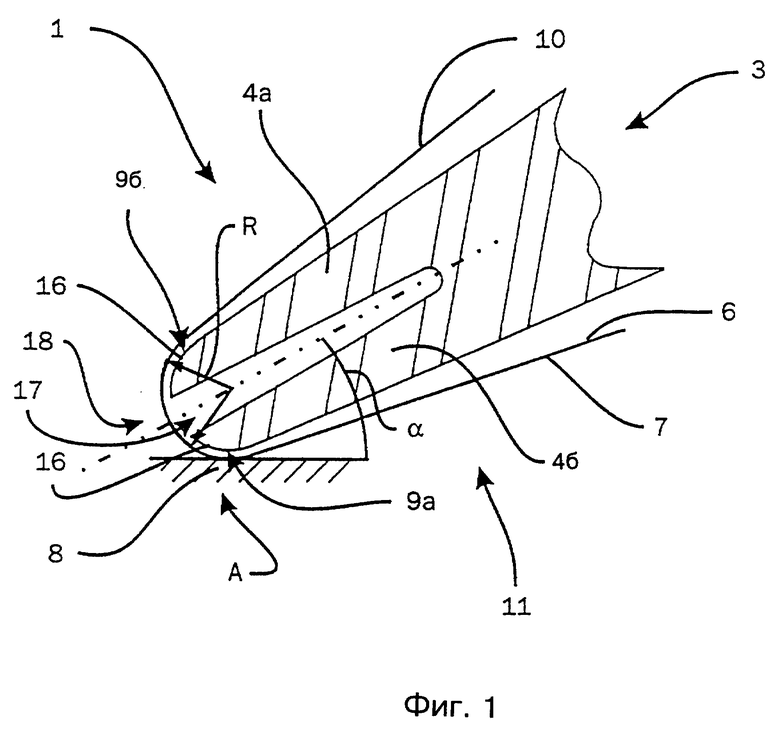
| DE 3832163 C1, 23.11.1989 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ МНОГОКОМПОНЕНТНОГО КЛЕЯ В ПРОЦЕССЕ СКЛЕИВАНИЯ ПЛОСКИХ ПОВЕРХНОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2050965C1 |
| US 4671687 A, 09.06.1987. | |||
