Изобретение относится к судостроению и касается конструирования быстроходных судов, оборудованных комплексов автоматических управляемых интерцепторов и движущихся в переходном режиме или в режиме глиссирования.
Известно быстроходное судно, содержащее корпус со скулой и установленные заподлицо с днищем интерцепторы [1].
Однако такое судно обладает большими весовыми затратами на установку интерцепторов и на обеспечение аэрации зоны отрывного обтекания за ними.
Технический результат от реализации описываемого изобретения заключается в снижении величины весовых затрат на установку интерцепторов и на обеспечение аэрации зоны отрывного обтекания за ними.
Этот технический результат достигается тем, что у быстроходного судна, содержащего корпус со скулой и установленные заподлицо с днищем интерцепторы, корпус судна выполнен с днищевым реданом, переходящим на скуле в бортовой редан с высотой, уменьшающейся до нуля выше стояночной ватерлинии, а упомянутые интерцепторы выполнены автоматически управляемыми и размещены за днищевым реданом.
Изобретение поясняется чертежами.
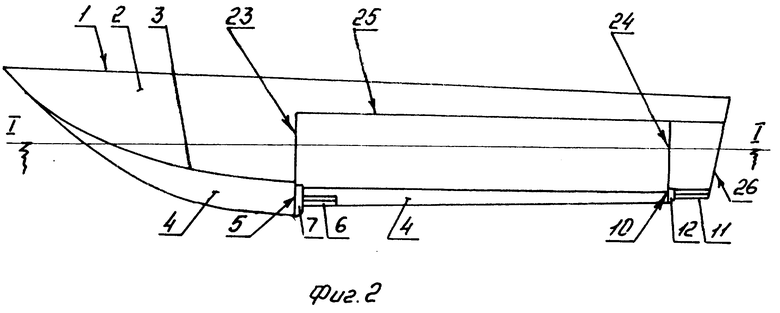
На фиг. 1 показано быстроходное судно, содержащее корпус с днищевыми и бортовыми реданами и оборудованное носовыми и кормовыми автоматически управляемыми интерцепторами, вид снизу; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же вид сзади (с кормы в нос); на фиг, 4 - продольный разрез А-А корпуса в месте установки новых интерцепторов на фиг. 1; на фиг. 5 представлена блок-схема системы автоматического управления интерцепторами судна, показанного на фиг. 1.
Быстроходное судно 1 (фиг. 1-3) содержит корпус 2 с остроскулыми обводами 3 и килеватым реданированным днищем 4. В носовой части днища 4 выполнен редан (уступ), а за ним на штангах 6 установлены носовые автоматически управляемые интерцепторы 7, разделенные на секции левого (7,а) и правого (7,б) борта. Носовые интерцепторы 7 выполнены с острой нижней кромкой (т.Б. на фиг. 4), гарантирующей устойчивый срыв потока с нее, установлены вдоль всей задней кромки редана 5 (т.В.) заподлицо с ней (убранное положение) и имеют возможность максимально выдвигаться на величину δни вниз (в поток) путем поворота штанг относительно осей 8, закрепленных в опорах 9.
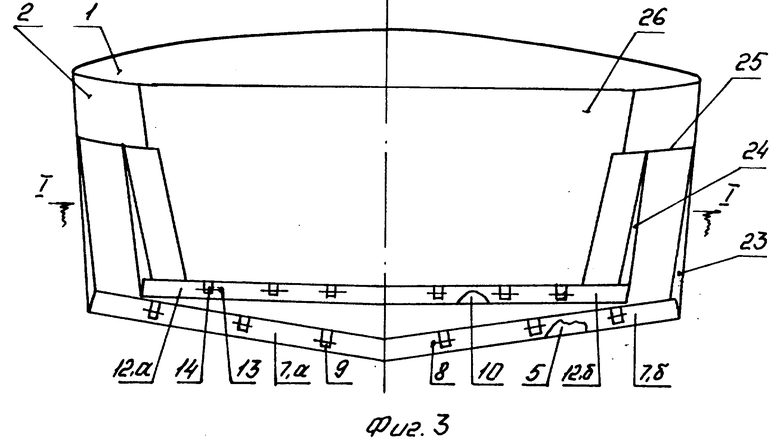
В кормовой части днища 4 выполнен второй редан (уступ) 10, а за ним на штангах 11 установлены кормовые автоматически управляемые интерцепторы 12, разделенные на секции левого (12,а) и правого (12,б) борта. Кормовые интерцепторы 12 также выполнены с острой нижней кромкой, установлены вдоль всей задней кромки редана 10 заподлицо с ней (убранное положение) и имеют возможность максимально выдвигаться на величину δки (в поток) путем поворота штанг 11 относительно осей 13, закрепленных в опорах 14 (фиг. 3).
Выдвиг δни носовых интерцепторов 7 (фиг. 4) происходит с помощью исполнительного привода 15, шарнирно закрепленного на корпусе 2 в опорах 16. Шток 17 привода 15 шарнирно соединен с внутренним рычагом (18,а) двуплечей качалки 18, второй наружный рычаг (18,б) которой через тягу 19 шарнирно соединен с интерцептором 7. Верхний конец тяги 19 размещен внутри ниши 20, образованной вваренной в днище 4 выгородкой 21 и ее съемной крышкой 22. Качалка 18 своей осью (18,в) крепится на крышке 22 в опорах, которые обеспечивают минимальное трение и не допускают попадания воды внутрь корпуса 2.
Выдвиг δки кормовых интерцепторов 12 обеспечивается с помощью аналоговых тяг, качалок и исполнительного привода. Т.е. носовые 7 и кормовые 12 интерцепторы имеют одинаковую конструкцию, одинаковые узлы подвески и одинаковую кинематику, обеспечивающую их выдвиг в поток.
На фиг. 3 показаны бортовые реданы 23 (носовой) и 24 (кормовой), которые начинаются со скулы 3 и лежат в плоскости соответствующего днищевого редана 5 или 10. Эти бортовые реданы имеют треугольную форму, и их высота, измеренная в плоскости шпангоута по перпендикуляру к бортовой обшивке, меняется от 0,2 - 1 высот соответствующего интерцептора до 0, т.е. плавно сходит на нет выше стояночной ватерлинии 1-1. При этом кромки бортовых реданов, как и у интерцепторов, выполнены острыми, чтобы обеспечить устойчивый срыв потока с них. На фиг. 3 позицией 25 отмечена вторая скула, которая образуется на бортах за счет реданов 23 и 24 и доходит до транца 26.
На фиг. 5 цифрами обозначены: 27 - блок задатчиков статических выдвигов носовых 7 и кормовых 12 интерцепторов, 28 - блок задатчиков углового (крен и дифферент) положения судна, 29 - блок параметров движения судна (углы крена и дифферента, их угловые скорости, перегрузки в ряде точек корпуса судна, скорость v движения судна), 30 - вычислитель, формирующий законы управления для следящих приводов интерцепторов, 31 - усилитель мощности, 32 - датчик обратной связи, 33, 34, 35 и 36 - следящий привод соответствующего интерцептора, 37 и 38 - кинематическая связь от штоков 17 приводов 15 до носовых 7 и кормовых 12 интерцепторов соответственно, включающая двуплечие качалки 18 и тяги 19 и определяющая зависимость δи= f(lшт) где δи - выдвиг интерцептора и lшт - ход штока соответствующего привода. Например, зависимость δни от lшт = ЖЖ' определяется соотношением плеч (ДЕ//ЕЖ) и (ИБ/ИГ) и вертикальным возвышением т.И над т.Б (фиг. 4), где ИБ - радиус рабочей поверхности интерцептора 7; ИГ - плечо тяги 19; ЕД - плечо наружного рычага (18,б) качалки 18 и ЕЖ - плечо внутреннего рычага (18,а) качалки 18.
Быстроходное судно 1, содержащее остроскулый корпус 2 с днищевыми реданами 5 и 10, переходящими на скуле 3 в бортовые реданы 23 и 24 соответственно, и оборудованное носовыми 7 и кормовыми 12 автоматически управляемыми интерцепторами, используют следующим образом.
При достижении судном 1 скорости V* (определяется по результатам модельных испытаний судна на этапе разработки эскизного проекта судна), при которой интерцепторы становятся эффективными и с их помощью можно создавать на днище гидродинамические силы, позволяющие управлять угловым положением судна, включают систему автоматического управления интерцепторами (САУИ). С ее помощью вручную (используя блок 27 задатчиков статических выдвигов) устанавливают необходимые оптимальные статические выдвиги для носовых и кормовых интерцепторов, которые для заданной скорости движения (хода) судна обеспечивают минимальное сопротивление движению в условиях "тихой" воды (определяются на этапе испытаний буксировочных моделей). При этом глиссирующие поверхности на днище имеют вид, показанный заштрихованными пятиугольниками на фиг. 1, поскольку на нижних кромках интерцепторов происходит устойчивый срыв потока и за интерцепторами создается мощная каверна, заполняемая атмосферным воздухом.
Воздух в каверну поступает со скулы через бортовые реданы левого и/или правого борта даже при движении судна в условиях волнения (когда эти реданы входят в волну, за ними также образуется устойчивая каверна). При установке статических выдвигов заданные постоянные сигналы от блока 27 поступают в вычислитель 30, а затем - на входы 2 усилителей мощности 31, входящих в состав следящих приводов 33, 34, 35 и 36. Эти сигналы усиливаются и далее отрабатываются приводами 15. При этом с датчиков обратной связи 32 на входы 1 усилителей 31 поступают сигналы, которые и компенсируют сигналы на входах 2. Когда сумма сигналов на входах 1 и 2 становится равной 0, то привод 15 и соответствующий интерцептор останавливаются и занимают заданное статическое положение. Поскольку следящие приводы 33-36 отслеживают сигналы, поступающие с вычислителя 30 (при изменении скорости хода, изменении или задании углового положения судна), интерцепторы выдвигаются далее до своего максимума или убираются до нуля и создают гидродинамические силы, препятствующие указанным изменениям, т. е. интерцепторы выступают как успокоители килевой и бортовой качки. Информацию об изменении углового положения и скорости этого изменения в вычислитель 30 выдают блок 29 параметров движения судна и блок 28 задатчиков углового положения судна.
На фиг. 1-4 показано судно 1 с двумя днищевыми реданами, за которыми расположены интерцепторы. Но кормовые интерцепторы могут располагаться и за транцевой плитой, и для них тогда не требуется второй бортовой редан. Но это менее рациональный вариант, поскольку тогда носовые и кормовые интерцепторы должны иметь разную конструкцию и требуются большие весовые затраты для установки интерцепторов.
Результаты конструкторских проработок ряда быстроходных судов с автоматически управляемыми интерцепторами (АУИ) показывают, что предлагаемое техническое решение (выполнение на бортах реданов, сопряженных с днищевыми реданами, за которыми установлены АУИ) по сравнению с прототипом позволяет более простым способом обеспечить устойчивую аэрацию каверны за интерцепторами во всем диапазоне скоростей хода и уменьшить весовые затраты для этих целей на 60-70%.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2096240C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2199466C2 |
| БЫСТРОХОДНОЕ СУДНО | 2007 |
|
RU2355592C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163554C1 |
| БЫСТРОХОДНОЕ СУДНО | 2008 |
|
RU2386567C1 |
| БЫСТРОХОДНОЕ СУДНО | 2007 |
|
RU2369516C2 |
| КОРПУС БЫСТРОХОДНОГО СУДНА | 1999 |
|
RU2161105C1 |
| СУДНО НА СЖАТОМ ПНЕВМОПОТОКЕ | 2020 |
|
RU2737560C1 |


Использование: изобретение относится к судостроению и касается конструирования быстроходных судов, оборудованных комплексом автоматически управляемых интерцепторов и движущихся в переходном режиме или режиме глиссирования. Сущность изобретения заключается в том, что у быстроходного судна, содержащего корпус со скулой и установленные заподлицо с днищем интерцепторы, корпус судна выполнен с днищевым реданом, переходящим в бортовой редан с высотой, уменьшающейся до нуля выше стояночной ватерлинии, а упомянутые интерцепторы выполнены автоматически управляемыми и размещены за днищевым реданом. 5 ил.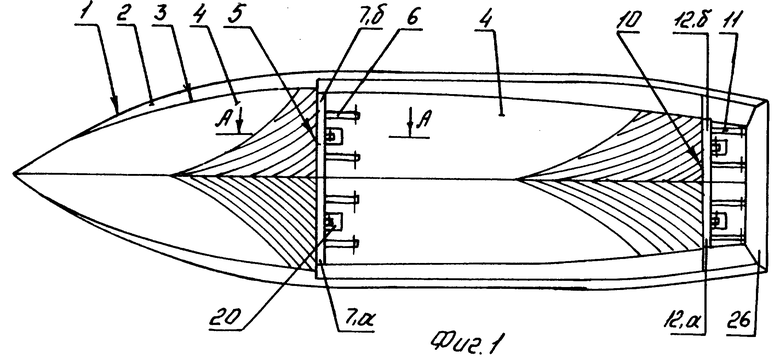
Быстроходное судно, содержащее корпус со скулой и установленные заподлицо с днищем интерцепторы, отличающееся тем, что корпус судна выполнен с днищевым реданом, переходящим на скуле в бортовой редан с высотой, уменьшающейся до нуля выше стояночной ватерлинии, а упомянутые интерцепторы выполнены автоматически управляемыми и размещены за днищевым реданом.
| SU, авторское свидетельство, 975490, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |

