Изобретение относится к судостроению и касается конструирования быстроходных судов, оборудованных кормовыми или носовыми автоматически управляемыми интерцепторами и движущихся в переходном режиме и в режиме глиссирования.
Известно быстроходное судно, содержащее корпус с транцем и транцевой плитой и оборудованное кормовыми автоматически управляемыми интерцепторами (СССР N 1837522, B 63 B 1/20, опублик. 20.12.85).
Однако оно обладает низкими эксплуатационными качествами и высокой материалоемкостью интерцепторов и транцевой плиты.
Технический результат от реализации описываемого изобретения заключается в повышении эксплуатационных качеств судна и в снижении материалоемкости интерцепторов и транцевой плиты.
Этот технический результат достигается тем, что у быстроходного судна, содержащего корпус с транцем и транцевой плитой и оборудованного кормовыми автоматически управляемыми интерцепторами, транцевая плита установлена на транце выше днища с образованием редана, а интерцепторы установлены под транцевой плитой с возможностью выдвига из-за задней кромки редана путем поворота относительно осей, параллельных задней кромке редана и закрепленных снизу на транцевой плите в районе ее задней кромки, при этом редан выполнен с высотой не менее высоты интерцептора.
Изобретение поясняется чертежами, где
на фиг. 1 схематически показано быстроходное судно, оборудованное носовыми и кормовыми автоматически управляемыми интерцепторами, вид снизу;
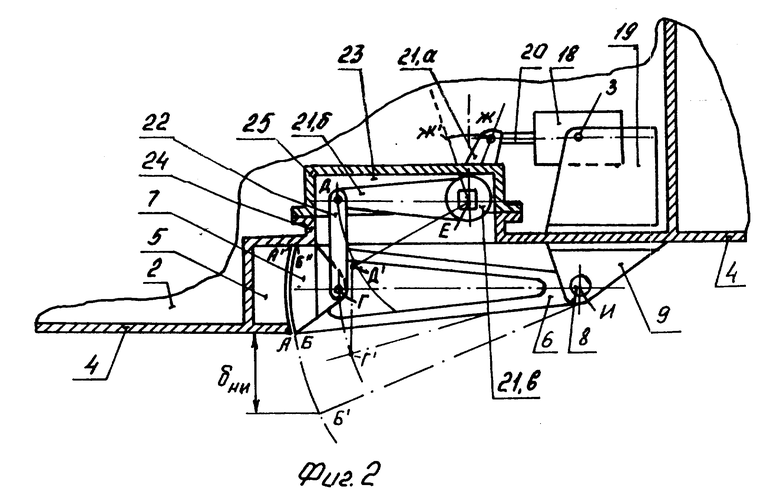
на фиг. 2 схематически изображен продольный разрез корпуса описываемого судна в районе установки носовых интерцепторов;
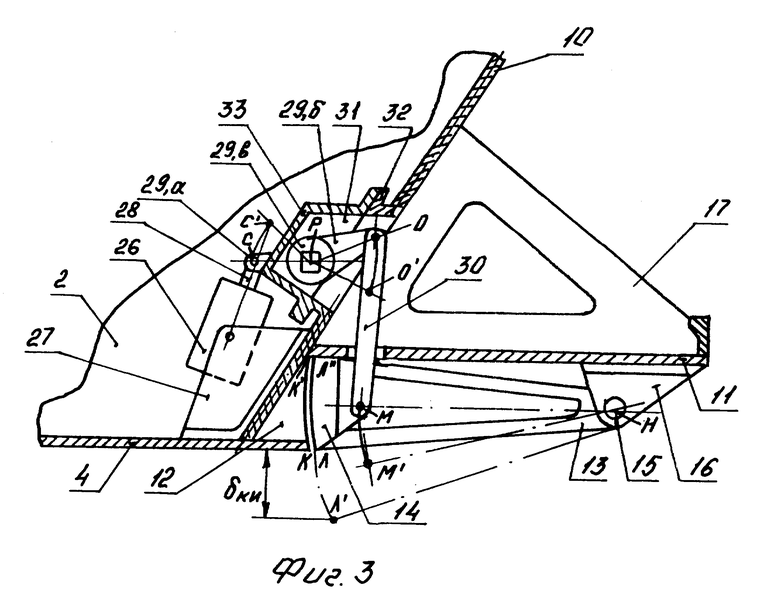
на фиг. 3 схематически показан продольный разрез корпуса быстроходного судна в районе установки кормовых интерцепторов;
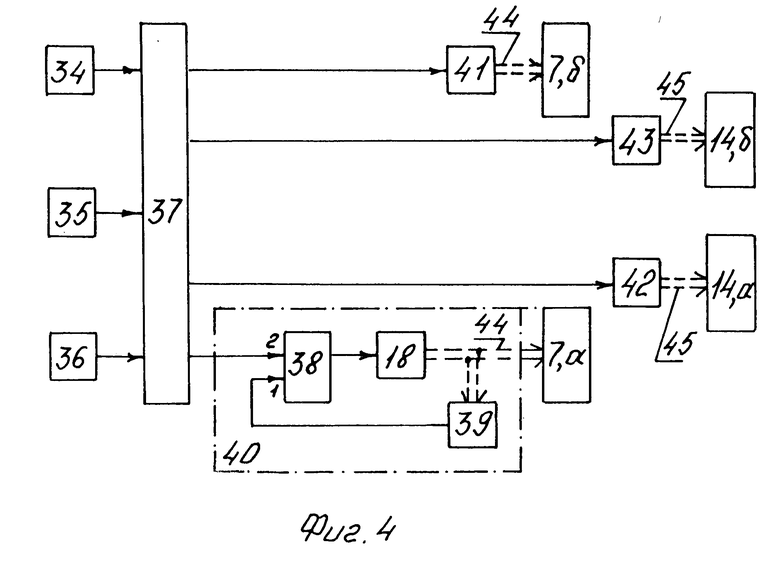
на фиг. 4 схематически изображена блок-схема системы автоматического управления работой носовых и кормовых интерцепторов описываемого быстроходного судна;
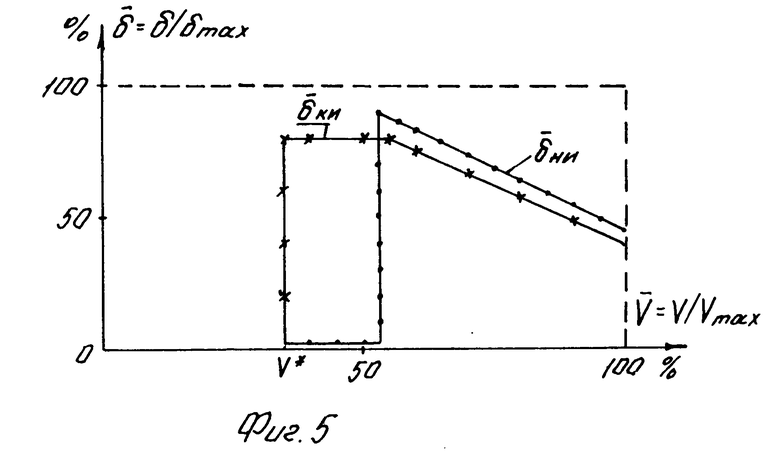
на фиг. 5 представлен один из вариантов относительных зависимостей оптимальных статических выдвигов носовых и кормовых интерцепторов от изменения относительной скорости хода судна.
Быстроходное судно 1 (см. фиг. 1) содержит корпус 2 с остроскулыми обводами 3 и килеватым днищем 4. В носовой части днища корпуса судна расположен редан 5, а за ним на штангах 6 установлены носовые автоматически управляемые интерцепторы 7, разделенные на секции левого (7,а) и правого (7,б) бортов и имеющие рабочую высоту, равную, например, 0,025 Вни, где Вни ширина днища по скуле 3 в месте установки интерцепторов 7 (ширина по редану). Рабочая высота интерцепторов 7, т. е. величина их выдвига δни в поток из-за задней кромки редана (вниз за точку А на фиг. 2), определяется по результатам буксировочных испытаний модели судна в гидроканале и обычно лежит в пределах 0,005. 0,025 Вни. Конструктивная высота интерцепторов (ББ'') превышает по своей величине рабочую высоту (ББ') на 5.10% чтобы исключить образование между точкой А и рабочей поверхностью ББ'' щели шириной более 0,5.1,5 мм, через которую начнет интенсивно перетекать вода и резко снизит давление в потоке перед интерцептором 7. Высота АА' редана 5 принимается более или равной конструктивной высоте интерцепторов 7, т.е. АА' ≥ ББ''. Интерцепторы 7 выполнены с острой нижней кромкой с поперечным сечением в точке Б, гарантирующей устойчивый срыв потока с нее, установлены заподлицо с днищем (в убранном положении) и имеют возможность максимального выдвига на величину δни вниз (в поток) путем поворота штанг 6 относительно осей 8, закрепленных на опорах 9. Корпус 2 (см. фиг. 3) имеет транец 10 и транцевую плиту 11. Последняя закреплена на транце 10 выше днища 4 с образованием редана 12 на корме судна, за которым на штангах 13 установлены кормовые интерцепторы 14, разделенные на секции левого (14,а) и правого (14,б) бортов. Интерцепторы 14 также выполнены с острой нижней кромкой с поперечным сечением в точке Л, установлены заподлицо с днищем (при убранном положении) и имеют возможность максимального выдвига на величину δки вниз (в поток) посредством поворота штанг 13 относительно осей 15, закрепленных на опорах 16 снизу на плите 11 в районе ее задней кромки.
Как и в случае интерцепторов 7, полагается, что для интерцепторов 14 справедливы следующие соотношения: КК'≥ ЛЛ', ЛЛ' 0,9.0,95 ЛЛ'. Поскольку при выдвиге интерцепторов 14 в поток гидродинамические силы возникают только лишь на кормовой части днища 4 (в разрезе левее точки К), то плита 11 может выполняться более легкой и тонкой по сравнению с плитой у судна из ближайшего аналога, хотя в описываемом здесь случае необходимо ее подкрепление с помощью книц 17.
Выдвиг δни интерцепторов 7 происходит с помощью исполнительного привода 18, шарнирно закрепленного на корпусе 2 в опорах 19. Шток 20 привода 18 шарнирно соединен с внутренним рычагом 21, а двуплечей качалки 21, второй наружный рычаг 21б, которой через тягу 22 шарнирно соединен с интерцепторов 7. Выдвигу δни соответствует дуга ББ' ЖЖ'. (ДЕ/ЕЖ)•(БИ/ИГ), где ЖЖ' ход штока 20 привода 18, ЕЖ плечо внутреннего рычага 21а качалки 21,ДЕ плечо наружного рычага 21б качалки 21, БИ радиус рабочей поверхности интерцептора 7, ГИ радиус перемещения нижнего концевого участка тяги 22. Верхний конец тяги 22 расположен внутри ниши 23, образованной вваренной в днище 4 выгородкой 24 и ее съемной крышкой 25. Качалка 21 своей осью поворота крепится на крышке 25 в опорах, которые обеспечивают минимальное трение и не допускают попадание воды внутрь корпуса 2.
Выдвиг δки интерцепторов 14 происходит с помощью исполнительного привода 26, шарнирно закрепленного на корпусе 2 в опорах 27. Шток 28 привода 26 шарнирно соединен с внутренним рычагом 29, а двуплечей качалки 29, второй наружный рычаг 29б которой соединен с интерцептором 14 шарнирно посредством тяги 30. Выдвигу δки соответствует дуга ЛЛ' (ОР/РС)•(НЛ/НМ), где СС' - ход штока 28 привода 26, РС плечо рычага 29, а качалки 29, ОР плечо рычага 29б качалки 29, НЛ радиус рабочей поверхности интерцептора 14, НМ радиус перемещения нижней концевой части тяги 30. Верхняя концевая часть тяги 30 размещена внутри ниши 31, образованной вваренной в транец 10 выгородкой 32 и ее съемной крышкой 33. Качалка 29 своей осью поворота крепится на крышке 33 в опорах, которые обеспечивают минимальное трение и не допускают попадание воды внутрь корпуса 2.
Как показано на фиг. 2 и 3, устройства интерцепторов 7 и 14 имеют одинаковую конструкцию и крепление и могут различаться линейными размерами, что позволяет примерно вдвое сократить объем рабочей документации на устройства и обеспечить высокий коэффициент унификации деталей и узлов.
Следует отметить три дополнительные особенности описываемой конструкции интерцепторов 7 и 14. Конструктивная высота интерцепторов (ББ'' у носовых интерцепторов 7 и ЛЛ'' у кормовых интерцепторов 14) является минимальной и требует минимальной высоты соответствующих реданов, т.е. весовые затраты на устройства интерцепторов 7 и 14 и их установку за реданом являются минимальными. Высота опор 9 и 16 (отстояние их самых нижних точек от днища судна) выбрана минимальной (не более высоты редана) для того, чтобы соответствующие штанги 6 и 13 и опоры 9 и 16 постоянно по времени находились в "тени" реданов, т. е. не попадали в поток и не создавали сопротивление движению судна. Поскольку рабочие поверхности интерцепторов являются выпуклыми (так как расположены впереди осей своего вращения), то при выдвиге интерцепторов в поток на них возникают гидродинамические силы, дающие составляющие, направленные против силы тяжести подвижных частей устройств интерцепторов и тем самым уменьшающие нагрузку на исполнительные приводы.
На блок-схеме, изложенной на фиг. 4, цифрами обозначены: 34 блок задатчиков статических выдвигов носовых 7 и кормовых 14 интерцепторов, 35 - блок задатчиков углового (крен и дифферент) положения быстроходного судна, 36 блок параметров движения судна (углы дифферента и крена, их угловые скорости, перегрузки в ряде точек корпуса быстроходного судна, скорость V хода судна), 37 вычислитель, формирующий законы управления для следящих приводов интерцепторов, 38 усилитель мощности, 39 датчик обратной связи, 40, 41, 42 и 43 следящий привод соответствующего интерцептора, 44 и 45 кинематическая связь от штоков приводов 18 и 26 (привод 26 аналогичен приводу 18) до носовых 7 и кормовых 14 интерцепторов соответственно, включающая двуплечие качалки 21 и 29 и тяги 22 и 30 и определяющая зависимость δи = f(lшт) где δи выдвиг интерцептора и lшт ход штока соответствующего привода.
Быстроходное судно 1, оборудованное описанным комплексом автоматически управляемых интерцепторов (носовых и кормовых или только кормовых), расположенных за соответствующими реданами, эксплуатируется следующим образом.
При достижении судном 1 относительной скорости  (определяется по результатам модельных испытаний судна на этапе разработки эскизного проекта судна), при которой интерцепторы становятся эффективными и с их помощью можно создавать гидродинамические силы, позволяющие управлять угловым положением судна, включают систему автоматического управления работой интерцепторов. Затем посредством ее применения или вручную (с помощью блока 34 задатчиков статических выдвигов интерцепторов) либо автоматически (если в системе предусмотрено программное изменение выдвигов интерцепторов в зависимости от относительной скорости хода) устанавливают необходимые оптимальные статические выдвиги для интерцепторов 7 и 14, которые необходимы для заданной оптической скорости хода
(определяется по результатам модельных испытаний судна на этапе разработки эскизного проекта судна), при которой интерцепторы становятся эффективными и с их помощью можно создавать гидродинамические силы, позволяющие управлять угловым положением судна, включают систему автоматического управления работой интерцепторов. Затем посредством ее применения или вручную (с помощью блока 34 задатчиков статических выдвигов интерцепторов) либо автоматически (если в системе предусмотрено программное изменение выдвигов интерцепторов в зависимости от относительной скорости хода) устанавливают необходимые оптимальные статические выдвиги для интерцепторов 7 и 14, которые необходимы для заданной оптической скорости хода  и определяются зависимостями, показанными на фиг. 5 (под статическим выдвигом интерцепторов понимается выдвиг, обеспечивающий минимальное сопротивление движению судна в условиях "тихой" воды; относительно этого выдвига интерцептор может выдвигаться дальше на 100% или убираться до 0% при парировании возмущений от волны, т.е. при использовании его в качестве успокоителя килевой и бортовой качки).
и определяются зависимостями, показанными на фиг. 5 (под статическим выдвигом интерцепторов понимается выдвиг, обеспечивающий минимальное сопротивление движению судна в условиях "тихой" воды; относительно этого выдвига интерцептор может выдвигаться дальше на 100% или убираться до 0% при парировании возмущений от волны, т.е. при использовании его в качестве успокоителя килевой и бортовой качки).
В случае "ручной" установки статических выдвигов на входы 2 усилителей мощности 38, входящих в состав следящих приводов 40, 41, 42 и 43, от вычислителя 37 поступают постоянные сигналы, которые усиливаются и отрабатываются приводами 18 и 26. При этом с датчиком обратной связи 39 на входы 1 усилителей мощности поступают сигналы, которые компенсируют сигналы на входах 2 от вычислителя 37. Каждый привод 18 или 26 (а следовательно, и интерцептор 7 или 14) останавливается в том положении, когда сумма сигналов на входах в усилитель мощности 38 становится равной нулю. То есть следящие приводы 40, 41, 42 и 43 отслеживают сигналы, поступающие на каждый из них с вычислителя. Эти сигналы меняются не только при изменении скорости хода, но и при изменении углового положения судна, если движение происходит в условиях волнения. Информацию об изменении углового положения и скорости этого изменения в вычислитель 37 выдают блок 36 параметров хода судна и блок 35 задатчиков углового положения судна. Как только любой из следящих приводов начинает отрабатыватель ненулевой сигнал с вычислителя 37, сразу же приходит в движение шток соответствующего привода, и он через качалку и тягу приводит в движение соответствующий интерцептор.
Конструкторские проработки показали, что описываемое устройство позволяет, примерно, на 40% увеличить коэффициент унификации автоматически управляемых интерцепторов, упростить их конструкцию и повысить защищенность кормовых интерцепторов, которые полностью защищены транцевой плитой, и снизить на 35.45% массу транцевой плиты и кормовых интерцепторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108259C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108260C1 |
| БЫСТРОХОДНОЕ СУДНО | 1996 |
|
RU2108258C1 |
| БЫСТРОХОДНОЕ СУДНО | 2009 |
|
RU2396180C1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2199466C2 |
| БЫСТРОХОДНОЕ СУДНО | 2008 |
|
RU2386567C1 |
| БЫСТРОХОДНОЕ СУДНО | 1988 |
|
SU1837522A1 |
| БЫСТРОХОДНОЕ СУДНО | 2000 |
|
RU2163553C1 |
| БЫСТРОХОДНОЕ СУДНО | 2007 |
|
RU2355592C1 |
| БЫСТРОХОДНОЕ СУДНО | 1997 |
|
RU2127689C1 |
Использование: изобретение относится к судостроению и касается конструирования быстроходных судов, движущихся в переходном режиме и режиме глиссирования и выполненных с носовыми или кормовыми автоматически управляемыми интерцепторами. Сущность изобретения состоит в том, что у быстроходного судна, содержащего корпус с транцем и транцевой плитой и оборудованного кормовыми автоматически управляемыми интерцепторами, транцевая плита установлена на транце выше днища с образованием редана, а интерцепторы установлены под транцевой плитой с возможностью выдвига из-за задней кромки редана путем поворота относительно осей, параллельных задней кромки редана и закрепленных снизу на транцевой плите в районе ее задней кромки, при этом редан выполнен с высотой не менее высоты интерцептора. 5 ил.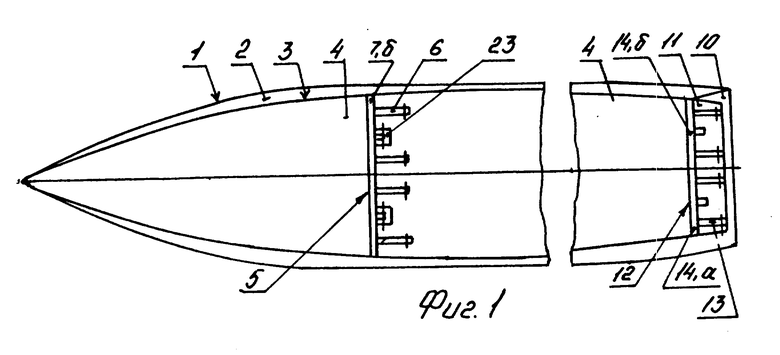
Быстроходное судно, содержащее корпус с транцем и транцевой плитой и оборудованное кормовыми автоматически управляемыми интерцепторами, отличающееся тем, что транцевая плита установлена на транце выше днища с образованием редана, а интерцепторы установлены под транцевой плитой с возможностью выдвига из-за задней кромки редана путем поворота относительно осей, параллельных задней кромке редана и закрепленных снизу на транцевой плите в районе ее задней кромки, при этом редан выполнен с высотой не менее высоты интерцептора.
| БЫСТРОХОДНОЕ СУДНО | 1988 |
|
SU1837522A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |

