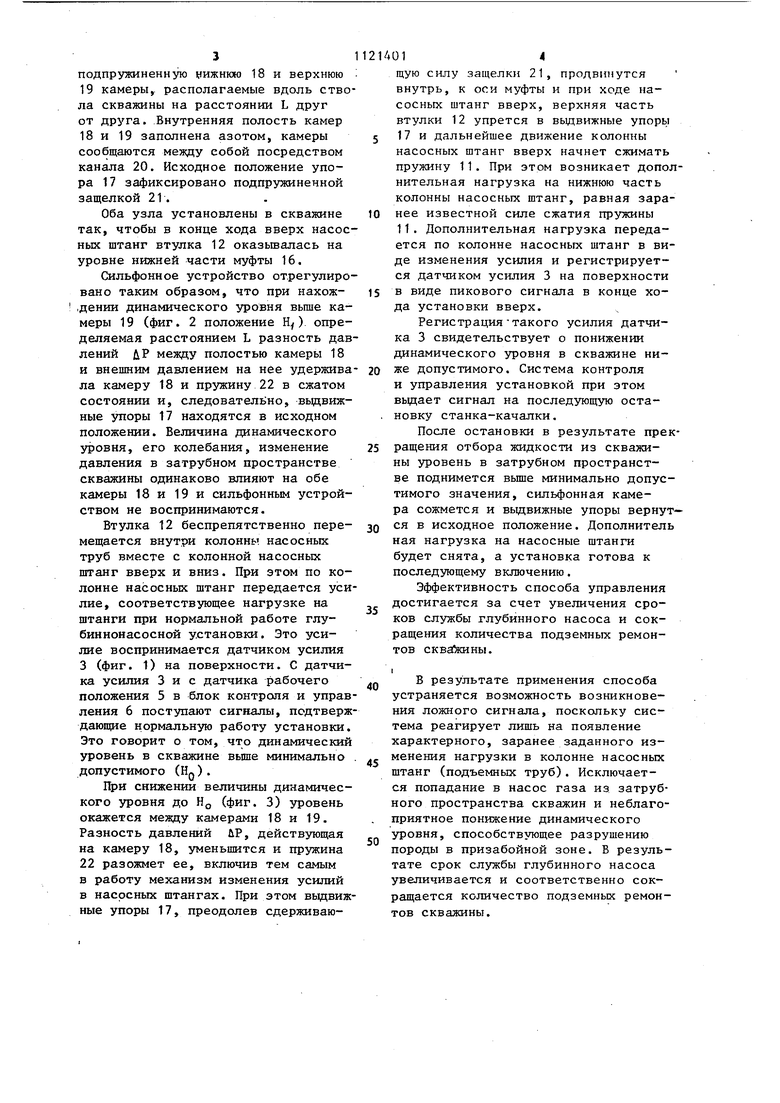
Изобретение относится к управлению работой скважины, оборудованной глубиннонасосной установкой. Известен способ управления работой скважины, оборудованной штанговой глубиннонасосной установкой, ко торый включает контроль изменений усилия в колонне насосных штанг (подъемных труб), возникагопщх при незаполнении насоса жидкостью вслед ствие понижения динамического уровня до .приема насоса l . Недостаток этого способа состоит в том, что допускается понижение динамического уровня в скважине до приема насоса, а это неблагоприятно сказывается на работе глубиннонасосной установки. Наиболее близким к изобретению является способ управления глубинно насосной установкой нефтяных скважин путем контроля изменений усилия в колонне насосных штанг и отключения установки при снижении динамического уровня жидкости в скважине ниже допустимого уровня уставки. Установка отключается на интервал времени, достаточный для восста новления динамического уровня 2 . Недостаток такого способа заключается в том, что при понижении динамического уровня до приема насоса в насос вместо жидкости начинает по тупать газ. При этом возникают неблагоприятные условия работы глубин ного насоса, ускоряющие износ его о новных узлов, 1фоме того, имеют мес то вибрация и удары; Технология экс луатации многих нефтяных скважин не допускает большого снижения динами ческого уровня, так как возникающие при этом депрессии на пласт приводя к разрушению призабойной зоны скваж ны. Попадающие при этом в жидкость мехпримеси (например песок) также способствуют преждевременному износу насоса или заклиниванию плунжерной пары. Кроме того, в процессе эксплуата ции глубиннонасосной установки могут возникать различные нарушения ее работы, не обязательно связанные с понижением динамического уровня до приема насоса, но аналогичные по характеру изменения усилия в колонне насосных штанг. В связи с этим в системе управления установкой воз никают ложные сигналы и соответственно снижается качество управления. Цель изобретения - повышение надежности работы глубиннонасосной установки за счет исключения неоднозначной интерпретации фактов изменения усилия в колонне насосных штанг и неблагоприятного для работы насоса снижения динамического уровня. Поставленная цель достигается тем, что согласно способу управления глубиннонасосной установкой нефтяных скважин путем контроля изменений усилия в колонне насосных штанг и отключения установки при снижении динамического уровня жидкости в скважине ниже допустимого уровня уставки, допустимый уровень уставки устанавливают вьш1е уровня приема насоса и при понижении динамического уровня уставки создают дополнительные усилия в колонне насосных штанг и отключают установку на время действия этих дополнительных усилий. На фиг. 1 показан пример реализации предлагаемого способа, на фиг, 2 и 3 -.схемы устройства формирования дополнительных усилий. Установка (фиг. 1) состоит их наземной и подземной частей. Наземная часть включает в себя станок-качалку 1 с электроприводом 2, датчик усилия 3, установленный на траверсе подвески 4, датчик рабочего положения 5, блок контроля и управле,ния установкой 6. Подземная часть установки включает в себя глубинный насос 7, колонну насосных штанг 8, колонну подъемных труб 9 и устройство 10 формирования дополнительных усилий в колонне насосных штанг. Устройство формирования дополнительных усилий состоит из двух узлов (фиг. 2 и 3). Узел, располагаемьй на колонне насосных штанг 8, состоит из пружины 11, помещенной во втулку 12, и устанавливается над плунжером 13 глубинного насоса между упорами 14 и 15. Узел, располагаемый на колонне .подъемных труб 9, представляет собой муфту 16, в теле которой смонтированы подпружиненные вьщвижные упоры 17, механически связанные с сильфонным устройством, включающим
3
подпружиненную рижнюю 18 и верхнюю 19 камеры, располагаемые вдоль ствола скважины на расстоянии L друг от друга. Внутренняя полость камер 18 и 19 заполнена азотом, камеры сообщаются между собой посредством канала 20. Исходное положение упора 17 зафиксировано подпружиненной защелкой 21.
Оба узла установлены в скважине так, чтобы в конце хода вверх насосных штанг втулка 12 оказьшалась на уровне нижней части муфты 16.
Сильфонное устройство отрегулировано таким образом, что при накож.дении динамического уровня выше камеры 19 (фиг. 2 положение Н) определяемая расстоянием L разность давлений liP между полостью камеры 18 и внешним давлением на нее удерживала камеру 18 и пружину 22 в сжатом состоянии и, следовательно, вьщвижные упоры 17 находятся в исходном положении. Величина динамического уровня, его колебания, изменение давления в затрубном пространстве скважины одинаково влияют на обе камеры 18 и 19 и сильфонным устройством не воспринимаются.
Втулка 12 беспрепятственно перемещается внутри колонны насосных труб вместе с колонной насосных щтанг вверх и вниз. При этом по колонне насосных штанг передается усилие, соответствующее нагрузке на штанги при нормальной работе глубиннонасосной установки. Это усилие воспринимается датчиком усилия 3 (фиг. 1) на поверхности. С датчика усилия 3 и с датчика рабочего положения 5 в блок контроля и управления 6 поступают сигналы, подтверждающие нормальную работу установки. Это говорит о том, что динамический уровень в скважине вьше минимально допустимого (HQ).
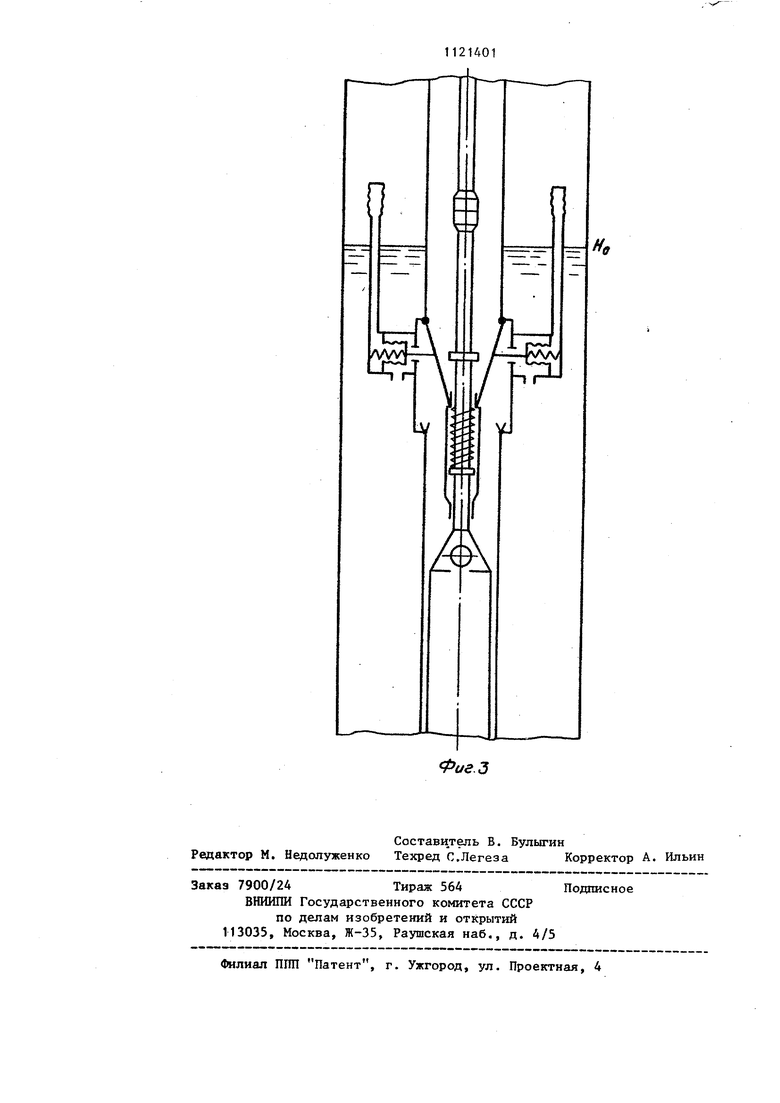
При снижении величины динамического уровня до HO (фиг. 3) зфовень окажется между камерами 18 и 19. Разность давлений ЬР, действующая на камеру 18, уменьшится и пружина 22 разожмет ее, включив тем самым в работу механизм изменения усилий в насосных штангах. При этом вьщвижные упоры 17, преодолев сдерживаю21А014
щую силу защелки 21, продвинутся внутрь, к оси муфты и при ходе насосных штанг вверх, верхняя часть втулки 12 упрется в вьщвижные упоры 5 17 и дальнейшее движение колонны насосных штанг вверх начнет сжимать пружину 11. При этом возникает дополнительная нагрузка на нижнюю часть колонны насосных штанг, равная зара10 нее известной силе сжатия пружины 11. Дополнительная нагрузка передается по колонне насосных штанг в виде изменения усилия и регистрируется датчиком усилия 3 на поверхности
15 в виде пикового сигнала в конце хода установки вверх.
Регистрация-такого усилия датчика 3 свидетельствует о понижении динамического уровня в скважине ни20 же допустимого. Система контроля и управления установкой при этом выдает сигнал на последзтощую оста. новку станка-качалки.
После остановки в результате прек5 ращения отбора жидкости из скважины уровень в затрубном пространстве поднимется вьш1е минимально допустимого значения, сильфонная камера сожмется и вьщвижные упоры вернут-
0 ся в исходное положение. Дополнитель ная нагрузка на насосные штанги будет снята, а установка готова к последующему включению.
Эффективность способа управления достигается за счет увеличения сроков службы глубинного насоса и сокращения количества подземных ремонтов сква: ины.
В результате применения способа устраняется возможность возникновения ложного сигнала, поскольку система реагирует лишь на появление характерного, заранее заданного изменения нагрузки в колонне насосных штанг (подъемных труб). Исключается попадание в насос газа из затрубного пространства скважин и неблагоприятное понижение динамического уровня, способствующее разрушению породы в призабойной зоне. В результате срок службы глубинного насоса увеличивается и соответственно сокращается количество подземных ремонтов скважины.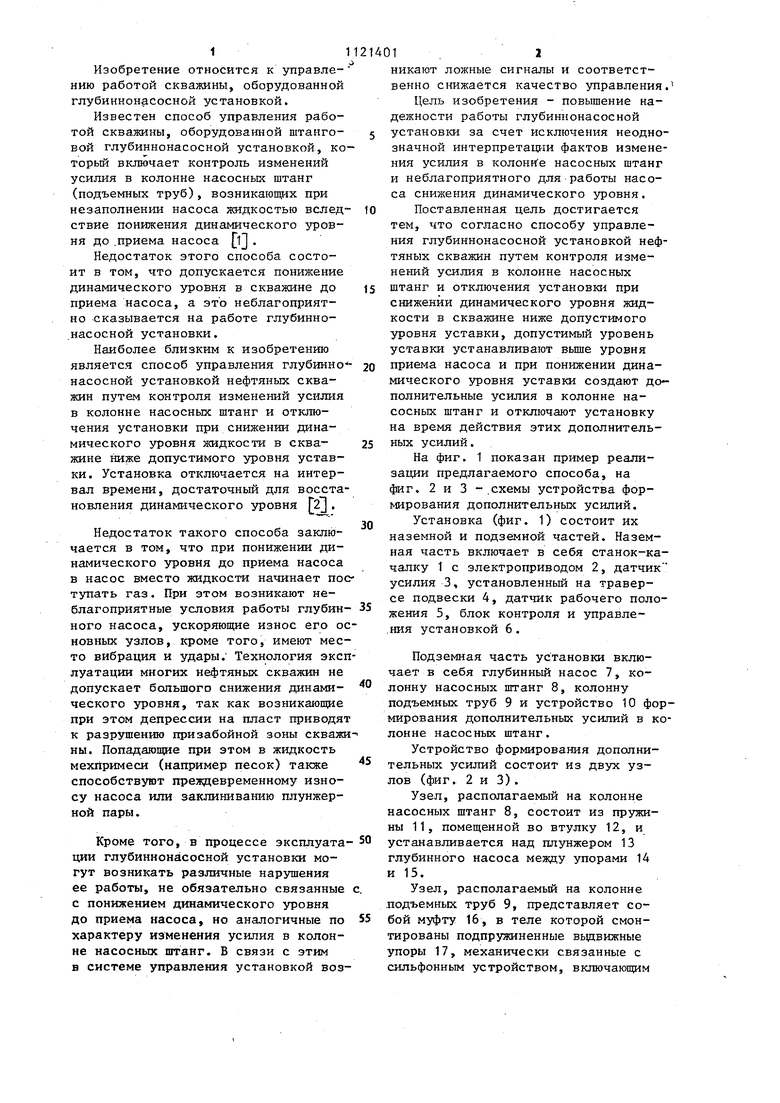
СПОСОБ УПРАВЛЕНИЯ ГЛУБИННОНАСОСНОЙ УСТАНОВКОЙ НЕФТЯНЫХ СКВАЖИН путем контроля изменений усилия в колонне насосных штанг и отключения установки при снижении динамического зфовня жидкости в скважине ниже допустимого уровня уставки, отличающийся тем, что, с целью повьшения надежности, допустимый уровень уставки устанавливают вьше уровня приема насоса и при понижении динамического уровня ниже уровня уставки создают дополнительные усилия в колонне насосных штанг и отключают установку на время действия этих дополнительных усилий.
Фи3.1
8
КР
/
X
V/
да
/5/
///
VW
/J
0г/г. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4034808, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Алехин С.А | |||
| и др | |||
| Автоматизация и телемеханизация производственных процессов | |||
| Ташкент, изд-во йДИ, 1969, часть 1, с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
