Предлагаемое техническое решение относится к области приборостроения и может быть использовано в конструкции волнового твердотельного гироскопа (ВТГ), предназначенного для инерциальных навигационных систем и систем управления подвижных объектов.
Основными преимуществами ВТГ являются: малая стоимость при высоких точностных параметрах, большая надежность, способность сохранять инерциальную информацию при временных перерывах электропитания, малая чувствительность к механическим, температурным и магнитным возмущениям [1, 2].
Известна конструкция ВТГ, содержащая полусферический резонатор, через полюс которого проходит цилиндрический стержень, корпус и основание с системами электродов, в которых закреплен стержень, при этом указанные элементы конструкции выполнены из высокодобротного изотропного материала, например плавленного кварца, и металлический герметизирующий кожух с гермовводами, в котором установлена сборка корпус - основание - резонатор, при этом электрические связи выполнены жестким соединением гермовводов кожуха с электродами корпуса и основания [3, 4].
Наиболее близким техническим решением является ВТГ [5], содержащий: полусферический резонатор, через полюс которого проходит цилиндрический стержень, корпус и основание с системами электродов, в которых закреплен стержень, при этом указанные элементы конструкции выполнены из высокогодобротного изотропного материала, например плавленного кварца, и металлический герметизирующий кожух с гермовводами, в котором установлена сборка корпус - основание - резонатор, при этом электрические связи выполнены жестким соединением гермовводов кожуха с электродами корпуса и основания.
Точность ВТГ, как и гироскопа, основанного на любом другом физическом эффекте, определяется величиной и стабильностью энергетической связи инерциального элемента с подвижными в инерциальном пространстве элементами конструкции. В данном случае инерциальным элементом является стоячая волна, возбужденная и поддерживаемая заданной амплитуды в полусферическом резонаторе. Из этого следует, что точность ВТГ в существенной мере будет зависеть от величины рассеивания колебательной энергии в резонаторе и зависимости этой величины от углового положения волны, т.е. от величины и анизотропии механической добротности резонатора. В силу погрешностей изготовления резонатора и его сборки с корпусом и основанием практически любой резонатор имеет анизотропию упругомассовых параметров, которая либо заложена в самом резонаторе, либо является следствием анизотропии сил, действующих на резонатор со стороны системы управления ВТГ. Различные технологические и схемные приемы позволяют значительно уменьшить вредный эффект, однако достигнуть абсолютной симметрии невозможно. Известно, что наличие упругомассовой анизотропии резонатора приводит к колебаниям его центра масс на частоте волны [6]. Последнее в существенной конструкции приводит к оттоку колебательной энергии стоячей волны через места крепления в корпус, основание и далее в металлический кожух. В результате механическая добротность резонатора падает, а ее анизотропия возрастает, что приводит в конечном итоге к снижению точности ВТГ.
Целью предлагаемого изобретения является повышение точности ВТГ за счет минимизации оттока колебательной энергии стоячей волны в элементы конструкции при условии существования колебаний центра масс резонатора путем введения дополнительных элементов конструкции, имеющих заданные параметры.
Поставленная цель достигается тем, что:
- дополнительно введены упругие центрирующие элементы, например цанги или шайбы, один из которых расположен между цилиндрическим стержнем резонатора и корпусом, а другой между цилиндрическим стержнем и основанием, при этом частота резонансных колебаний элементов в радиальном и осевом направлениях меньше частоты стоячей волны;
- дополнительно введен упругий центрирующий подвес, выполненный, например, в виде системы плоских пружин, расположенный между сборкой резонатор - упругие центрирующие элементы - корпус - основание и герметизирующим кожухом, частота резонансных колебаний которого в радиальном и осевом направлениях меньше частоты стоячей волны;
- дополнительно введена жесткая фиксация, например с помощью болтов, корпуса и основания относительно друг друга;
- дополнительно введены маломоментные упругие токоподводы, выполненные в виде витых и плоских пружин, обеспечивающие электрические соединения электродов корпуса и основания с гермовводами кожуха.
На чертеже приведена конструктивная схема предлагаемого ВТГ. Он состоит из полусферического резонатора 1, через полюс которого проходит цилиндрический стержень, корпуса 2 и основания 3 с системами электродов, при этом резонатор 1, корпус 2 и основание 3 выполнены из высокодобротного материала, например плавленного кварца, и металлического герметизирующего кожуха 4 с гермовводами 5. Цилиндрический стержень резонатора 1 закреплен в корпусе 2 и основании 3 с помощью упругих центрирующих элементов 6, например цанг или шайб. Сборка резонатор - упругие центрирующие элементы - корпус - основание закреплена с помощью упругого центрирующего подвеса 7, выполненного, например, в виде системы плоских пружин, в кожухе 4. Корпус 2 и основание 3 жестко зафиксированы друг относительно друга, например с помощью болтов 8. Электрические соединения электродов корпуса 2 и основания 3 с гермовводами 5 кожуха 4 выполнены маломоментными упругими токоподводами, представляющими из себя витые 9 и плоские 10 пружины.
При возбуждении и поддержании амплитуды стоячей волны в резонаторе 1 на его резонансной частоте в силу анизотропии упругомассовых параметров резонатора возникают колебания его центра масс в радиальном и осевом направлениях на частоте стоячей волны. Последнее с необходимостью вызывает энергетическую связь резонатора 1 с корпусом 2 и основанием 3 через места соединения указанных деталей. Величина этой связи определяется частотной характеристикой мест соединения и диссипацией энергии в них. Выполнив рассматриваемое соединение с помощью элементов 6, которые обеспечивают резонансную частоту в радиальном и осевом направлениях мест соединения, существенно меньшую частоты стоячей волны при минимально возможной диссипации энергии в них, можно минимизировать величину энергетической связи. В пределе это равносильно свободному подвесу резонатора. Поэтому элементы 6 выполнены из упругого высокодобротного материала. С другой стороны, конструктивные параметры элементов 6 рассчитаны таким образом, что они обеспечивают необходимое центрирование резонатора 1 в указанной выше сборке для заданных эксплуатационных условий.
Несмотря на наличие элементов 6 часть колебательной энергии будет уходить в корпус и основание. Корпус 2 и основание 3 изготовлены из того же высокодобротного материала, что и резонатор 1, поэтому диссипация энергии в них мала. Однако герметизирующий кожух 4 изготовлен из металла, имеющего относительно низкую механическую добротность. Поэтому необходимо введение упругого подвеса 7 сборки резонатор - упругие центрирующие элементы - корпус - основание в кожухе 4, который исключая прямой механический контакт этой сборки с кожухом выполняет такую же роль, что и элементы 6, и спроектирован с учетом тех же требований.
Так как невозможно обеспечить полную идентичность элементов 6, необходима жесткая фиксация друг относительно друга корпуса 2 и основания 3, которая реализована болтами 8. В противном случае возникает дополнительная потеря энергии на трение в месте контакта корпуса 2 и основания 3 при их взаимных перемещениях.
Аналогично назначение токоподводов 9 и 10. С одной стороны, они минимизируют энергетическую связь между элементами конструкции, а с другой, исключают потери на трение в местах контакта.
Выполненные опытные работы показали, что в образцах ВТГ, изготовленных по известной конструктивной схеме, наблюдается уменьшение исходной механической добротности резонатора до 3-х раз при появлении анизотропии добротности до 30%. В образцах ВТГ, изготовленных по предложенной конструктивной схеме с использованием тех же резонаторов, корпусов и оснований, уменьшение исходной механической добротности не превышало 10% при анизотропии добротности менее 2%. Соответственно точность гироскопа увеличилась более чем в 10 раз.
Источники информации:
1. Scott V.B., Delco Makes Low-Cost Gyro Prototype, II Aviation Week., 1982, v. 117, N 17, pp. 64-72.
2. Djandjgava G. I., Vinogradov G.M., Lipatnikov V.I., Development and Testing of Hemispherical Resonator Gyroscope, 5th Saint Petersburg International Conference on Integrated Navigation Systems, 1998, pp. 218-221.
3. Патент ЕПВ N 0141621.
4. Lynch D.D., Matthews A., Varty G.T., Transfer of Sensor Thechnology from Oil-Drilling to Space Application, 5th Saint Petersburg International Conference on Integrated Navigation Systems, 1998, pp. 27-36.
5. Патент США N 4951508.
6. Zhbanov Yu.K., Theoretical Aspects of Balancing the Semispherical Resonator Gyro, 2nd Saint Petersburg International Conference on Gyroscopic Technology and Navigation, 1995, part II, p. 88.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП | 2022 |
|
RU2793299C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП С МЕТАЛЛИЧЕСКИМ РЕЗОНАТОРОМ | 2021 |
|
RU2785956C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА (ВАРИАНТЫ) | 2012 |
|
RU2521783C2 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| УСТРОЙСТВО АВТОНОМНОЙ КОРРЕКЦИИ | 1999 |
|
RU2161296C1 |
| ГРАВИМЕТРИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2149429C1 |
Устройство может быть использовано в системах управления подвижными объектами. Устройство содержит полусферический резонатор с установленным в нем цилиндрическим стержнем и металлический герметизирующий кожух с гермовводами, в котором установлена сборка корпус - основание - резонатор. Дополнительно введены упругие центрирующие элементы, упругий центрирующий подвес, выполненный в виде системы плоских пружин, маломоментные упругие токоподводы в виде витых плоских пружин, а также жесткая фиксация корпуса и основания, что позволяет повысить точность гироскопа. 1 ил.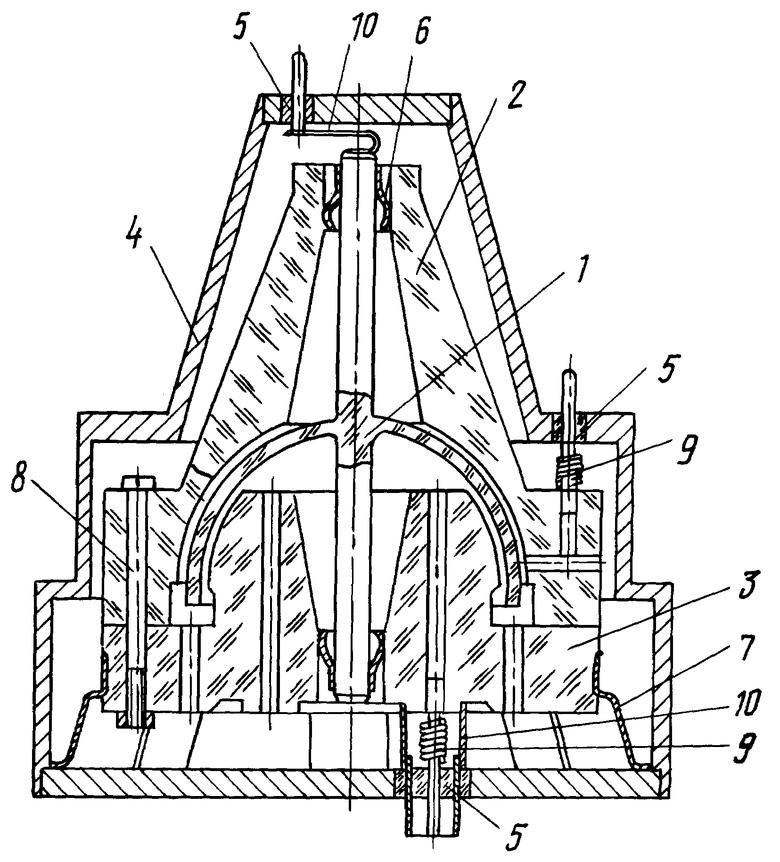
Волновой твердотельный гироскоп, содержащий полусферический резонатор, через полюс которого проходит цилиндрический стержень, корпус и основание с системами электродов, в которых закреплен стержень, при этом указанные элементы конструкции выполнены из высокодобротного изотропного материала, и металлический герметизирующий кожух с гермовводами, в котором установлена сборка корпус - основание - резонатор, при этом электрические связи выполнены жестким соединением гермовводов кожуха с электродами корпуса и основания, отличающийся тем, что в устройство дополнительно введены упругие центрирующие элементы, один из которых расположен между цилиндрическим стержнем резонатора и корпусом, а другой - между цилиндрическим стержнем и основанием, при этом частота резонансных колебаний элементов в радиальном и осевом направлениях меньше частоты стоячей волны, а также дополнительно введен упругий центрирующий подвес, расположенный между сборкой резонатор - упругие центрирующие элементы - корпус - основание и герметизирующим кожухом, частота резонансных колебаний которого в радиальном и осевом направлениях меньше частоты стоячей волны, а также дополнительно введена жесткая фиксация корпуса и основания относительно друг друга, а также дополнительно введены маломоментные упругие токоподводы, обеспечивающие электрические соединения электродов корпуса и основания с гермовводами кожуха.
| US 4951508, 28.08.1990 | |||
| RU 2056038 C1, 10.03.1996 | |||
| US 5712427, 27.01.1998 | |||
| US 4157041, 05.06.1979. |
