Изобретение относится к области измерительной техники и может быть использовано при создании инерциальных навигационных систем различного типа, в частности, в бесплатформенных инерциальных навигационных системах.
Основным элементом изобретения является инерциальное измерительное устройство с цифровым средством управления и самоконтроля, позволяющее выдавать внешним устройствам и системам значение инерциальной величины и информацию о ее достоверности, в том числе в цифровой форме. Устройство содержит в себе инерциальный измерительный датчик с управляющей сервисной электроникой в виде цифрового средства управления, которое выделяет значение инерциальной величины, формирует информацию о достоверности инерциальной величины, управляет работой инерциального датчика и производит его самотестирование посредством выделения необходимой информации из сигнала с измерительного выхода инерциального датчика.
В данной области техники в качестве инерциальных датчиков хорошо известны датчики угловой скорости на основе кольцевого гелий-неонового лазера, называемые лазерными гироскопами. Современные лазерные гироскопы включают в себя термически и механически стабильный блок из оптической стеклокерамики, имеющий множество сформированных полостей и каналов для активной среды. На концах оптических каналов размещаются зеркала, которые формируют замкнутый оптический контур. В составе кольцевого лазера данных гироскопов имеется, по крайней мере, один катод и несколько анодов, оптическое устройство регистрации первичных сигналов, а также внешние системы управления работой кольцевого лазера, которые могут включать: устройство частотной подставки, систему зажигания разряда, устройство регулировки периметра и устройство стабилизации и управления токами в плечах разряда.
Лазерные гироскопы, которые используют микропроцессоры для своего управления, требуют, чтобы инерциальная навигационная информация, управляющая информация, тестовая информация и информация о состоянии были переданы внешним системам, включая инерциальную навигационную систему или тестовую систему. Включение микропроцессора/микроконтроллера/программируемой логической интегральной схемы в лазерный гироскоп позволяет реализовать новые возможности, такие как автономное управление и самотестирование, а также самокалибровку и самодиагностику [1]. Эти новые возможности требуют передачи и приема широкого спектра данных, некоторые из которых поступают с высокой частотой и наличия информационного канала между выходом лазерного гироскопа и входом цифрового средства управления. Такой подход к построению архитектуры измерительной системы инерциального датчика [2] совместно с методом цифровой обработки его информационного сигнала [3] позволяет увеличить точность лазерного гироскопа на несколько порядков [4].
Известны решения в патентах Японии и США (JP 2010127686A [5], ЕР 0760934 В1 [6]), реализующие некоторые функции управления работой лазерного гироскопа. Однако основным недостатком таких решений является то, что управляющее воздействие для работы лазерного гироскопа или его систем управления, формируется не только на основе информации, выделенной из сигнала с измерительного выхода инерциального датчика, но и с помощью дополнительных информационных каналов.
Наиболее близким к заявляемому устройству является конструкция лазерного гироскопа модульного типа, заявленная американской фирмой «Honeywell» патент Killpatrick, et al. US 6208414 [7]. Известная конструкция лазерного гироскопа включает следующие функциональные элементы:
- инерциальный датчик для обнаружения по меньшей мере одной инерциальной величины, в котором инерционный датчик имеет, по меньшей мере, один вход управления датчиком и измерительный выход инерционной величины, который реагирует в ответ по меньшей мере на один вход управления датчиком;
- устройство электропитания и устройство управления током разряда плечей лазерного гироскопа;
- цифровое управляющее устройство (микроконтроллер), имеющее по меньшей мере один рабочий измерительный выход, представляющий состояние работоспособности гироскопа и реализующий:
- средство для прогнозирования ошибки лазерного гироскопа на основании по меньшей мере одного рабочего параметра,
- средство оценки срока службы инерциального датчика, в котором средство оценки срока службы соединено с цифровым средством управления и в котором имеется выходной сигнал текущем периоде службы инерциального датчика;
- устройство уменьшения скорости дрейфа смещения нуля лазерного гироскопа обеспечивающее управление позиционированием зеркал, причем средство управления соединено с первым средством позиционирования зеркала и вторым средством позиционирования зеркала таким образом, чтобы первое положение зеркала и второе положение зеркала изменялось в зависимости от длины пути прошедшей лазерным лучом, компенсируя изменения периметра оптического контура лазерного гироскопа;
- устройство возбуждение виброподвеса лазерного гироскопа, соединенное с тензодатчиком возбуждения.
Основой задачей известного технического решения является создание модульного лазерного гироскопа с методом запуска, который обеспечивает синхронизированную и эффективную процедуру, приводящую к минимальной задержке и минимальным побочным эффектам при работе лазерного гироскопа. Другой решаемой задачей модульного лазерного гироскопа является создание улучшенного способа и устройства для управления работой лазерного гироскопа.
Недостатком описанного модульного лазерного гироскопа является необходимость использования дополнительных источников информации, которые характеризуют текущие параметры инерциального датчика, и служат для формирования управляющих воздействий необходимых для работы гироскопа. Приведенное техническое решение требует наличия на одном из входов модульного лазерного гироскопа выделенной инерциальной величины с выхода инерциального датчика. Это не позволяет использовать датчики, информационный сигнал с выхода которых содержит в себе инерциальную величину в неявном виде и требует ее последующего выделения.
Задача, на решение которой направлено заявляемое изобретение, заключается в прецизионной регистрации инерциальной величины путем цифровой обработки первичного информационного сигнала от инерциального датчика внутри цифрового средства управления, и выделения значений инерциальной величины и параметров, характеризующих инерциальный датчик, для последующего управления подсистемами инерциального датчика, самотестирования инерциального датчика и передачи выделенной информации об инерциальной величине и ее достоверности к внешним устройствам и системам.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в уменьшении погрешности измерения инерциальной величины за счет управления и самотестирования инерциального датчика в реальном времени без использования иных источников информации, кроме его первичных сигналов. Предложенный подход позволяет организовать необходимые подсистемы для запуска и работы инерциального датчика, с учетом ограничений каждой подсистемы, основным источником информации для которых является только первичный информационный сигнал.
Заявленный технический результат в предложенном техническом решении достигается тем, что измерительное устройство, служащее для измерения по меньшей мере одной инерциальной величины, включает в себя инерциальный датчик, служащий для измерения по меньшей мере одной инерциальной величины, реагирующий по меньшей мере на один вход управления и в котором имеется по меньшей мере один вход управления инерциальным датчиком и по меньшей мере один измерительный выход информационного сигнала, содержащий инерциальную величину и параметры, характеризующие инерциальный датчик, цифровое средство управления работой инерциального датчика, причем оно имеет по меньшей мере один вход, связанный по меньшей мере с одним измерительным выходом информационного сигнала инерциального датчика, по меньшей мере один управляющий выход, связанный по меньшей мере с одним входом управления инерциального датчика, а также по меньшей мере одно средство управления подсистемами инерциального датчика и по меньшей мере одно средство самотестирования инерциального датчика, при этом согласно изобретению цифровое средство управления работой инерциального датчика дополнительно имеет по меньшей мере один выход измеряемой инерциальной величины, по меньшей мере один выход достоверности информации инерциальной величины, а также устройство выделения инерциальной величины и параметров, характеризующих инерциальный датчик, соединенное по меньшей мере через один вход цифрового средства управления по меньшей мере с одним измерительным выходом информационного сигнала инерциального датчика, по меньшей мере с одним выходом измеряемой инерциальной величины, со входом по меньшей мере одного средства самотестирования, а также со входом по меньшей мере одного средства управления подсистемами инерциального датчика, причем средство самотестирования соединено по меньшей мере с одним выходом достоверности информации инерциальной величины, а средство управления подсистемами инерциального датчика связано по меньшей мере через один управляющий выход по меньшей мере с одним входом управления инерциальным датчиком.
Заявленный технический результат достигается за счет применения в составе инерциального измерительного устройства:
- цифрового средства управления, имеющего по меньшей мере один выход измеряемой инерциальной величины и информации о ее достоверности к внешним блокам и узлам навигационной системы;
- организованного информационного канала между выходом инерциального датчика и входом цифрового средства управления, в котором происходит выделение из информационного сигнала способом его цифровой прецизионной обработки инерциальной величины и параметров, характеризующих инерциальный датчик для средств самотестирования и управления;
- средств управления подсистемами инерциального датчика, которые по параметрам, характеризующим инерциальный датчик, обеспечивают законы управления, учитывающие его техническое состояние и минимизирующие погрешности в зависимости от режимов работы и условий эксплуатации;
- организации выхода достоверности информации об инерциальной величине за счет средств самотестирования в цифровом средстве управления.
При этом в соответствии с предложенным изобретением предусматриваются предпочтительные варианты его воплощения, указанные ниже.
Инерциальный датчик может быть выполнен в виде по меньшей мере одного лазерного гироскопа и/или по меньшей мере одного волнового твердотельного гироскопа.
При этом в случае выполнения инерциального датчика в виде лазерного гироскопа, средство управления подсистемами инерциального датчика может быть выполнено в виде устройства формирования частотной подставки, или устройства автоматического регулирования и стабилизации токов разрядов в плечах кольцевого лазера, или устройства автоматической регулировки периметра кольцевого лазера.
В случае выполнения инерциального датчика в виде волнового твердотельного гироскопа средство управления подсистемами инерциального датчика может быть выполнено в виде устройства формирования сигнала возбуждения резонатора, или устройства стабилизации амплитуды колебаний резонатора и подавления квадратурной составляющей, или устройства слежения за положением волны, или устройства измерения фазового сдвига модулирующей частоты.
Обработка информационного сигнала по меньшей мере с одного измерительного выхода инерциального датчика может осуществляться методами цифровой обработки сигналов.
Информационный сигнал по меньшей мере с одного измерительного выхода инерциального датчика может являться квадратурным.
Выделенная из информационного сигнала по меньшей мере с одного измерительного выхода инерциального датчика информация для самотестирования датчика может содержать отклик в сигнале измерительного инерциального датчика на управляющее воздействие.
Выделенная из информационного сигнала по меньшей мере с одного измерительного выхода инерциального датчика управляющая информация может содержать параметры, характеризующие внутреннее состояние инерциального датчика.
Средство для самотестирования инерциального датчика может иметь по меньшей мере один вход и выход.
Цифровое средство управления работой инерциального датчика может являться по меньшей мере одним цифровым управляющим процессором.
Цифровое средство управления работой инерциального датчика и средство самотестирования могут являться по меньшей мере одним цифровым управляющим процессором.
Цифровое средство управления работой инерциального датчика может являться по меньшей мере одним микроконтроллером.
Цифровое средство управления работой инерциального датчика и средство самотестирования могут являться по меньшей мере одним микроконтроллером.
Цифровое средство управления работой инерциального датчика может являться по меньшей мере одной сверх-большой интегральной схемой.
Цифровое средство управления работой инерциального датчика и средство самотестирования могут являться по меньшей мере одной сверхбольшой интегральной схемой.
Цифровое средство управления работой инерциального датчика может являться по меньшей мере одной программируемой логической интегральной схемой.
Цифровое средство управления работой инерциального датчика и средство самотестирования могут являться по меньшей мере одной программируемой логической интегральной схемой.
Цифровое средство управления работой инерциального датчика с целью адаптации режимов работы, управления и самотестирования к изменяющимся условиям эксплуатации может являться по меньшей мере одной самообучающейся системой на основе нейросетей.
Цифровое средство управления работой инерциального датчика и средство самотестирования с целью адаптации режимов работы, управления и самотестирования к изменяющимся условиям эксплуатации могут являться по меньшей мере одной самообучающейся системой на основе нейросетей.
Цифровое средство управления работой инерциального датчика может являться по меньшей мере одной системой на кристалле (SoC).
Цифровое средство управления работой инерциального датчика и средство самотестирования могут являться по меньшей мере одной системой на кристалле (SoC).
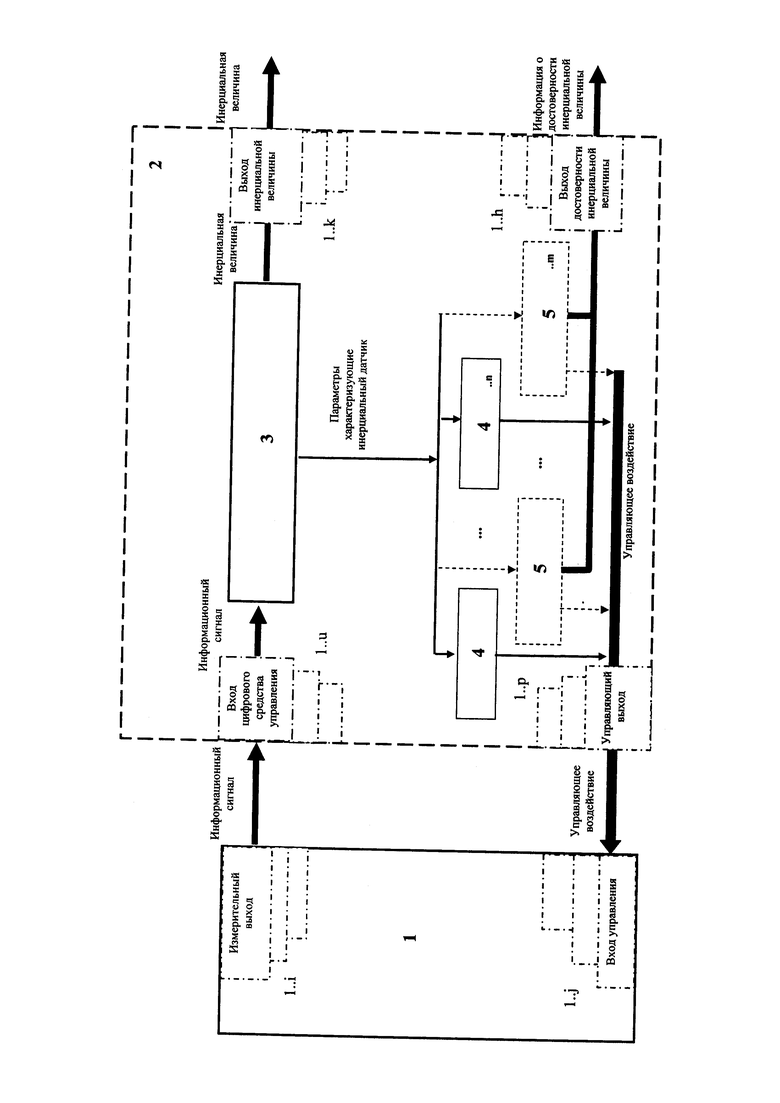
Сущность предложенного изобретения раскрывает Фиг. - блок-схема инерциального измерительного устройства с цифровыми средствами управления и самоконтроля, где:
1 - инерциальный датчик;
2 - цифровое средство управления работой инерциального датчика;
3 - устройство выделения из входного сигнала инерциальной величины и параметров, характеризующих инерциальный датчик;
4 - средства управления подсистемами инерциального датчика;
5 - средства самотестирования инерциального датчика.
Работа предложенного инерциального измерительного устройства осуществляется следующим образом.
С измерительного выхода информационного канала инерциального датчика (1) снимается информационный сигнал, который поступает через вход цифрового средства управления (2) на устройство (3) выделения инерциальной величины и параметров, характеризующих инерциальный датчик. В устройстве (3) происходит обработка и выделение из информационного сигнала инерциальной величины и определение параметров, характеризующих инерциальный датчик. Для лазерного гироскопа такими параметрами являются:
-амплитуда колебаний кольцевого лазера гироскопа относительно его корпуса;
- частота этих колебаний;
- режим ошумления колебаний, в том числе глубина модуляции;
- амплитуда первичных информационных сигналов;
- величина статического порога синхронизации встречных волн;
- величина превышения рабочего тока над пороговым;
- информация о рассогласовании настройки на максимум кривой усиления;
- информация о коэффициенте связи встречных волн в кольцевом лазере.
Применительно к волновому твердотельному гироскопу такими параметрами, характеризующими его работу, являются:
- добротность резонатора;
- резонансная частота колебаний резонатора;
- фаза стоячей волны;
- величина и стабильность амплитуды колебаний;
- упруго-массовая не симметрия первой, второй и третьей гармоники.
Выделенное в устройстве (3) значение инерциальной величины выдается внешним устройствам и системам через выход инерциальной величины. При этом, определенные в устройстве (3) параметры, характеризующие работу инерциального датчика, поступают затем, как на средства управления подсистемами (4), так и на средства самотестирования (5). В качестве средств управления подсистемами для лазерного гироскопа применяются: устройство формирования частотной подставки, устройство автоматического регулирования и стабилизации токов разрядов в плечах кольцевого лазера, устройство автоматической регулировки периметра кольцевого лазера. Для волнового твердотельного гироскопа средствами управления подсистемами являются: устройство формирования сигнала возбуждения резонатора, устройство стабилизации амплитуды колебаний резонатора и система подавления квадратурной составляющей, устройство слежения за положением волны, устройство измерения фазового сдвига модулирующей частоты. Сформированные в средствах управления подсистемами (4) управляющие сигналы через управляющий выход цифрового средства управления (2) поступают на вход управления инерциального датчика (1) для управления его исполнительными устройствами. Формируемый средствами самотестирования (5) управляющий сигнал достоверности инерциальной информации поступает через выход достоверности инерциальной величины цифрового средства управления (2) на внешние устройства и системы.
Рассмотрим принцип работы предложенного инерциального измерительного устройства на примерах лазерного гироскопа с вибрационной частотной подставкой [4] и волнового твердотельного гироскопа.
Пример 1
С измерительного выхода информационного канала инерциального датчика (1), в качестве которого используется лазерный гироскоп, снимается частотно модулированный квадратурный сигнал. Этот сигнал поступает через вход цифрового средства управления (2) на устройство (3). В устройстве (3) происходит обработка и выделение из информационного сигнала инерциальной величины в виде приращения угла по методу, изложенному в патенте [3]. Вместе с выделением инерциальной величины определяются параметры, характеризующие лазерный гироскоп. Этими параметрами являются:
- амплитуда колебаний кольцевого лазера гироскопа относительно его корпуса;
- частота этих колебаний;
- режим ошумления колебаний, в том числе глубина модуляции;
- амплитуда первичных информационных сигналов;
- величина статического порога синхронизации встречных волн;
- величина превышения рабочего тока над пороговым;
- информация о рассогласовании настройки на максимум кривой усиления;
- информация о коэффициенте связи встречных волн в кольцевом лазере.
Указанные параметры в виде сигналов поступают на средства самотестирования (5) и средства управления подсистемами (4), в качестве которых применяются устройства:
- формирования частотной подставки;
- автоматического регулирования и стабилизации токов разрядов в плечах кольцевого лазера;
- автоматической регулировки периметра кольцевого лазера, Функционирование средств управления подсистемами для лазерного гироскопа рассмотрим на примере работы системы формирования частотной подставки. На вход средства управления частотной подставки поступает параметр, выделенный из информационного сигнала с измерительного выхода лазерного гироскопа и характеризующий величину амплитуды колебаний кольцевого лазера гироскопа относительно его корпуса. На основе этой величины рассчитывается амплитуда напряжения управляющего воздействия. Если значение глубины модуляции амплитуды колебаний кольцевого лазера гироскопа относительно его корпуса выше/ниже порогового значения, то формируется сигнал управляющего воздействия, на который снижается/повышается значение амплитуды напряжения управляющего сигнала частотной подставки.
Сформированные в средствах управления подсистемами (4) управляющие воздействия через управляющий выход цифрового средства управления (2) поступают на вход управления лазерного гироскопа для управления его исполнительными устройствами: вибрационным подвесом, пьезоэлектрическими преобразователями, разрядными промежутками кольцевого лазера. Управляющие воздействие приводит к отклику в информационном сигнале, который выражается в изменении его параметров, таких, как амплитуда, частота, фазовые соотношения сигналов.
Функционирование средств самотестирования для лазерного гироскопа рассмотрим на примере тестирования работы подсистемы средства управления автоматической регулировкой периметра кольцевого лазера. Средство самотестирования производит тестовую отстройку напряжения на пьезоэлектрических преобразователях от значения настройки на максимум кривой усиления. Подтверждение корректности функционирования системы регулирования периметра кольцевого лазера происходит в следующей логике: если параметр информационного сигнала (амплитуда) меньше значения соответствующего максимуму кривой усиления, то функционирование системы регулирования периметра кольцевого лазера корректно и формируется сигнал достоверности инерциальной информации; в противном случае формируется сигнал недостоверности инерциальной информации, по причине некорректной работы системы регулирования периметра кольцевого лазера.
Пример 2
Теперь рассмотрим принцип работы предложенного инерциального измерительного устройства на примере инерциального датчика в виде волнового твердотельного гироскопа. Функционирование волнового твердотельного гироскопа основывается на инертности упругих волн, возникающих при движении стоячей волны возбужденной при изгибных колебаниях чувствительного элемента. В качестве рабочей формы механических колебаний используется вторая форма, имеющая четыре узла и четыре пучности.
Чувствительный элемент волнового твердотельного гироскопа представляет собой тонкостенную оболочку - резонатор (например, полусферической или цилиндрической формы), закрепленный с помощью стержня, проходящего через его полюсную область (или ось), с жестко связанными деталями: корпусом и основанием. На резонаторе и основании формируются электроды имеющие различную форму и конфигурацию для управления колебаниями и снятия информации о положении стоячей волны. Эти электроды вместе с проводящими поверхностями резонатора образуют электростатические системы формирования информации и управляющего силового воздействия. Управление стоячей волной образованной в резонаторе, осуществляется посредством подачи напряжения на систему управляющих электродов, образующих совместно с резонатором систему электрических. емкостей. Каждый электрод электрически соединен с диаметрально противоположным электродом.
Сигналы, поступающие с одной части информационных электродов, электрически складываются и образуют так называемый косинусный канал информации, а с другой синусный. Таким образом, как и в случае с ЛГ на измерительном выходе получается квадратурный сигнал. Косинусный и синусный сигнал изменяются с частотой собственных колебаний резонатора и амплитудой, пропорциональной составляющим амплитуд колебаний. Целью цифровой обработки таких сигналов, реализуемой в цифровом средстве управления (2) является определение соотношения амплитуд информационных сигналов для нахождения угла поворота стоячей волны относительно осей резонатора позволяющих выделить инерциальную величину.
С измерительного выхода информационного канала инерциального датчика (1), в качестве которого используется волновой твердотельный гироскоп, снимается информационный сигнал. Средствами цифровой обработки из сигнала восстанавливаются параметры, однозначно связанные с функционированием волнового твердотельного гироскопа, по которым восстанавливается информация об инерциальной величине и информация, необходимая для формирования управляющих воздействий на датчик.
Параметры, характеризующие работу волнового твердотельного гироскопа, поступают, как на средства управления подсистемами (4), в качестве которых применяются устройства:
- возбуждения колебаний резонатора;
- стабилизации амплитуды колебаний;
- подавления квадратурной составляющей волны;
- слежения за положением стоячей волны;
- фазовой автоподстройки частоты;
так и на средства самотестирования (5). Количество подсистем определяется конкретной конструкцией, исполнением и типом резонатора.
Сформированные в средствах управления подсистемами (4) управляющие воздействия через управляющий выход цифрового средства управления (2) поступают на вход управления волнового твердотельного гироскопа для управления его исполнительными устройствами: например, электростатической системой электродов, образующей совместно с резонатором систему электрических емкостей, через которые происходит управление стоячей волной.
Управляющее воздействие в различных режимах управления:
- запуска/торможения;
- стабилизации колебаний;
- измерения параметров стоящей волны;
приводит к отклику в информационном сигнале, зафиксированном с системы измерительных электродов, который выражается в изменение его параметров таких, как амплитуда и фаза сигнала.
Сформированные в средствах самотестирования (5) управляющие сигналы поступают через выход достоверности инерциальной величины во вне (например, в вычислитель навигационной системы) от инерциального измерительного устройства с цифровым средством управления для принятия решения о достоверности получаемой информации для решения навигационной задачи.
Функционирование средств управления подсистемами (4) для волнового твердотельного гироскопа поясняется на примере работы системы подавления квадратурной составляющей сигнала. От цифрового средства управления (2) через ЦАП на вход средства усилителя системы подавления квадратурной составляющей поступает переменный с частотой возбуждения низковольтный сигнал прямоугольной формы, сдвинутый на 90 градусов по фазе относительно колебаний резонатора. Сигнал преобразуется в переменное напряжение прямоугольной формы с заданной частотой возбуждения, амплитудой и постоянным смещением, которое подается на управляющие электроды резонатора, образующие синусный и косинусный канал. Это позволяет подавить квадратурную составляющую сигнала резонатора волнового твердотельного гироскопа.
Функционирование средств самотестирования поясняется на примере тестирования работы системы запуска. Подтверждение корректности функционирования системы запуска происходит по величине информационного сигнала. При достижении порогового значения величины выдается сигнал о готовности к работе.
Цифровое средство управления может быть реализовано с применением: цифрового управляющего процессора, микроконтроллера, сверх-большой интегральной схемы, программируемой логической интегральной схемы, системой на кристалле (SoC).
Описанные выше примеры использования в полной мере иллюстрируют суть предложенного изобретения, однако не ограничивают область применения патентуемого устройства или его части.
Источники информации
1. Molchanov А.V., Belokurov V.A., Chirkin M.V., Koshelev V.I., Mishin V.Yu., Morozov D.A. Precision laser gyro with a digital channel for quadrature signal processing // В сборнике: 22nd Saint Petersburg International Conference on Integrated Navigation Systems, ICINS 2015 - Proceedings 22. 2015. C. 307-314.
2. Koshelev V.I., Belokurov V.A., Chirkin M.V., Mishin V.Y. FPGA-based signal processing module for digital laser gyroscope // В сборнике: 2017 6th Mediterranean Conference on Embedded Computing, MECO 2017 - Including ECYPS 2017, Proceedings 6. 2017. C. 74-77.
3. Патент RU 2571437, МПК G01P 3/36, G01C 19/66 - Способ прецизионной обработки сигналов лазерного гироскопа.
4. Кузнецов А.Г., Молчанов А.В., Чиркин М.В., Измайлов Е.А. Прецизионный лазерный гироскоп для автономной инерциальной навигации // Квантовая электроника. 2015. Т. 45. №1. С. 78-88.
5. Патент JP 2010127686 A - Ring laser gyro.
6. Патент ЕР 0760934 В1 G01C 19/66, H01S 3/083 - Microprocessor controlled ring laser gyro power control system.
7. Патент US 6208414 G01B 9/02, H05B 7/010 - Modular laser gyro.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2013 |
|
RU2541711C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП-МУЛЬТИГЕНЕРАТОР С ИСПОЛЬЗОВАНИЕМ КРИСТАЛЛИЧЕСКОЙ СРЕДЫ УСИЛЕНИЯ СО СРЕЗОМ НА <100> | 2008 |
|
RU2504732C2 |
| Способ считывания и управления колебаниями волнового твердотельного гироскопа | 2019 |
|
RU2704334C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ ЗОНЫ ЗАХВАТА В ЛАЗЕРНОМ ГИРОСКОПЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ (ЛАЗЕРНЫЙ ГИРОСКОП) | 2008 |
|
RU2397446C2 |
| Датчик угла на базе волнового твердотельного гироскопа с металлическим резонатором | 2024 |
|
RU2832852C1 |
| ПОЛУПРОВОДНИКОВЫЙ ЛАЗЕРНЫЙ ГИРОСКОП (ВАРИАНТЫ) | 2010 |
|
RU2451906C1 |
| СТАБИЛИЗИРОВАННЫЙ ТВЕРДОТЕЛЬНЫЙ ЛАЗЕРНЫЙ ГИРОСКОП | 2010 |
|
RU2532997C2 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП | 2022 |
|
RU2793299C1 |
Изобретение относится к области измерительной техники и может быть использовано при создании инерциальных навигационных систем различного типа, в частности в бесплатформенных инерциальных навигационных системах. Техническим результатом является обеспечение возможности выдавать внешним устройствам и системам значение инерциальной величины и информацию о ее достоверности, в том числе в цифровой форме. Устройство содержит в себе инерциальный измерительный датчик с управляющей сервисной электроникой в виде цифрового средства управления, которое выделяет значение инерциальной величины, формирует информацию о достоверности инерциальной величины, управляет работой инерциального датчика и производит его самотестирование посредством выделения необходимой информации из сигнала с измерительного выхода инерциального датчика. 21 з.п. ф-лы, 1 ил.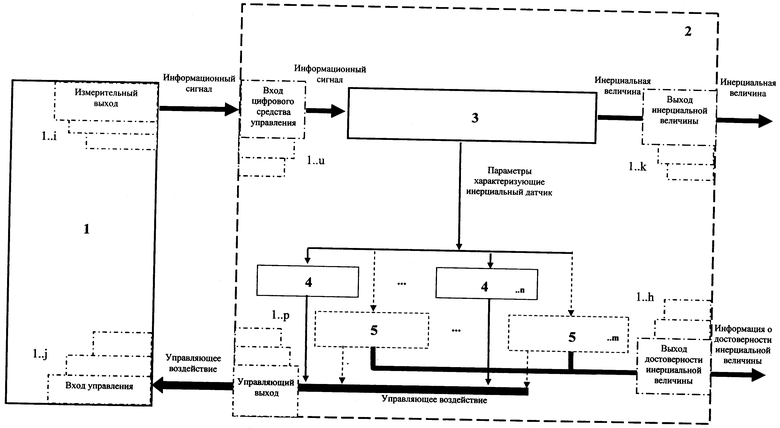
1. Измерительное устройство, служащее для измерения по меньшей мере одной инерциальной величины, включающее в себя инерциальный датчик, служащий для измерения по меньшей мере одной инерциальной величины, реагирующий по меньшей мере на один вход управления и в котором имеется по меньшей мере один вход управления инерциальным датчиком и по меньшей мере один измерительный выход информационного сигнала, содержащий инерциальную величину и параметры, характеризующие инерциальный датчик, цифровое средство управления работой инерциального датчика, причем оно имеет по меньшей мере один вход, связанный по меньшей мере с одним измерительным выходом информационного сигнала инерциального датчика, по меньшей мере один управляющий выход, связанный по меньшей мере с одним входом управления инерциального датчика, а также по меньшей мере одно средство управления подсистемами инерциального датчика и по меньшей мере одно средство самотестирования инерциального датчика, отличающееся тем, что цифровое средство управления работой инерциального датчика дополнительно имеет по меньшей мере один выход измеряемой инерциальной величины, по меньшей мере один выход достоверности информации инерциальной величины, а также устройство выделения инерциальной величины и параметров, характеризующих инерциальный датчик, соединенное по меньшей мере через один вход цифрового средства управления по меньшей мере с одним измерительным выходом информационного сигнала инерциального датчика, по меньшей мере с одним выходом измеряемой инерциальной величины, со входом по меньшей мере одного средства самотестирования, а также со входом по меньшей мере одного средства управления подсистемами инерциального датчика, причем средство самотестирования соединено по меньшей мере с одним выходом достоверности информации инерциальной величины, а средство управления подсистемами инерциального датчика связано по меньшей мере через один управляющий выход по меньшей мере с одним входом управления инерциальным датчиком.
2. Измерительное устройство по п. 1, отличающееся тем, что инерциальный датчик выполнен в виде по меньшей мере одного лазерного гироскопа.
3. Измерительное устройство по п. 1, отличающееся тем, что инерциальный датчик выполнен в виде по меньшей мере одного волнового твердотельного гироскопа.
4. Измерительное устройство по п. 1, отличающееся тем, что инерциальный датчик выполнен в виде, по меньшей мере, одного лазерного гироскопа и, по меньшей мере, одного волнового твердотельного гироскопа.
5. Измерительное устройство по пп. 1 и 2, отличающееся тем, что средство управления подсистемами инерциального датчика выполнено в виде устройства формирования частотной подставки, устройства автоматического регулирования и стабилизации токов разрядов в плечах кольцевого лазера, устройства автоматической регулировки периметра кольцевого лазера.
6. Измерительное устройство по пп. 1 и 3, отличающееся тем, что средство управления подсистемами инерциального датчика выполнено в виде устройства формирования сигнала возбуждения резонатора, устройства стабилизации амплитуды колебаний резонатора и подавления квадратурной составляющей, устройства слежения за положением волны, устройства измерения фазового сдвига модулирующей частоты.
7. Измерительное устройство по п. 1, отличающееся тем, что обработка информационного сигнала по меньшей мере с одного измерительного выхода инерциального датчика осуществляется методами цифровой обработки сигналов.
8. Измерительное устройство по п. 2, отличающееся тем, что информационный сигнал по меньшей мере с одного измерительного выхода инерциального датчика является квадратурным.
9. Измерительное устройство по п. 1, отличающееся тем, что выделенная из информационного сигнала по меньшей мере с одного измерительного выхода инерциального датчика информация для самотестирования датчика содержит отклик в сигнале измерительного инерциального датчика на управляющее воздействие.
10. Измерительное устройство по п. 1, отличающееся тем, что выделенная из информационного сигнала по меньшей мере с одного измерительного выхода инерциального датчика управляющая информация содержит параметры, характеризующие внутреннее состояние инерциального датчика.
11. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика является по меньшей мере одним цифровым управляющим процессором.
12. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика и средство самотестирования являются по меньшей мере одним цифровым управляющим процессором.
13. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика является по меньшей мере одним микроконтроллером.
14. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика и средство самотестирования являются по меньшей мере одним микроконтроллером.
15. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика является по меньшей мере одной сверх-большой интегральной схемой.
16. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика и средство самотестирования являются по меньшей мере одной сверх-большой интегральной схемой.
17. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика является по меньшей мере одной программируемой логической интегральной схемой.
18. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика и средство самотестирования являются по меньшей мере одной программируемой логической интегральной схемой.
19. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика является, по меньшей мере, одной самообучающейся системой на основе нейросетей.
20. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика и средство самотестирования являются по меньшей мере одной самообучающейся системой на основе нейросетей.
21. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика является по меньшей мере одной системой на кристалле (SoC).
22. Измерительное устройство по п. 1, отличающееся тем, что цифровое средство управления работой инерциального датчика и средство самотестирования являются по меньшей мере одной системой на кристалле (SoC).
| СПОСОБ ПРЕЦИЗИОННОЙ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ГИРОСКОПА | 2014 |
|
RU2571437C1 |
| СПОСОБ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2550298C1 |
| US 6208414 B1, 27.03.2001 | |||
| WO 1994002808 A1, 03.02.1994. | |||

