Предлагаемое изобретение относится к области приборостроения и может быть использовано для измерения гравитационного поля Земли с движущихся объектов - самолетов, вертолетов, плывущих объектов, автомобилей.
Известен струнный гравиметр, измеряющий с достаточной точностью гравитационное поле Земли с вертолетов в момент их зависания [1].
Основными недостатками указанного гравиметра являются невысокая вибростойкость, большие габариты и масса, недопустимо высокие ошибки измерений, возникающие при отклонении оси чувствительности гравиметра от местной вертикали и появлении при этом линейных ускорений, действующих в направлении, перпендикулярном к местной вертикали.
Прототипом предлагаемого изобретения является гравиметрическая измерительная система, построенная на базе малогабаритного акселерометрического гравиметра [2]. Известная система содержит измерительный блок, состоящий из чувствительного элемента акселерометра, первый выход которого соединен с датчиком момента, а второй выход с датчиком температуры, связанные в свою очередь с электронным блоком аналого-цифрового преобразования. Этот блок содержит две цепи из последовательно соединенных компенсатора, интегратора, трансформатора масштаба и счетчика импульсов, а также последовательно соединенные мультиплексор, входами связанный с счетчиками, блок памяти и вычислитель, при этом входы управления обоих трансформаторов масштаба, счетчиков, а также мультиплексора, блока памяти и вычислителя подключены к генератору тактовых импульсов.
Работа известной гравиметрической системы осуществляется следующим образом. При воздействии ускорения силы тяжести на акселерометр в нем вырабатывается аналоговый сигнал, пропорциональный ускорению силы тяжести, который поступает на вход электронного блока аналого-цифрового преобразования. В электронном блоке поступающий из акселерометра сигнал компенсируется, масштабируется, преобразовывается и выдается потребителю в виде цифрового кода, пропорционального приращению гравиметрического поля Земли.
Основными недостатками такой системы являются:
- недопустимо высокая погрешность измерений при использовании гравиметрической системы на движущемся с ускорением объекте. При отклонении оси чувствительности измерительной системы от местной вертикали и воздействии на нее горизонтальных ускорений в выходном сигнале появляется составляющая, обусловленная горизонтальным ускорением, искажающая информацию о гравитационном поле;
- невозможность контроля правильности измерений, производимых в процессе изменения положения объекта, на котором находится измерительная система, и тем самым отсутствует подтверждение достоверности получаемой информации.
Целью предлагаемого изобретения является создание гравиметрической измерительной системы, обеспечивающей точность и надежность измерений движущегося с ускорением объекта.
Указанная цель достигается тем, что в известную гравиметрическую систему, содержащую измерительный блок, в качестве которого используют акселерометр, установленный по измерительной оси системы, и связанный с ним электронный блок аналого-цифрового преобразования, дополнительно введены два измерительных блока, аналогичных первому, установленных по двум взаимно перпендикулярным осям, лежащим в плоскости, ортогональной измерительной оси системы, связанные в свою очередь, с вновь введенным вычислителем. Кроме того, в систему дополнительно введены четвертый и пятый измерительные блоки, аналогичные первому, установленные как и первый по измерительной оси системы и связанные с ними соответственно второй и третий электронные блоки аналого-цифрового преобразования, аналогичные первому, выходами подключенные через вновь введенный кворум-элемент, третий вход которого подключен к выходу первого электронного блока аналого-цифрового преобразования, к вычислителю.
Введение дополнительных измерительных блоков, установленных по двум взаимно перпендикулярным осям, лежащим в плоскости, ортогональной измерительной оси системы, позволит скомпенсировать ошибки измерительного блока, установленного по измерительной оси системы, обусловленные неизбежным отклонением измерительной оси от местной вертикали в процессе выставки и влиянием в результате этого линейных ускорений, действующих в направлении, перпендикулярном местной вертикали, в процессе движения объекта.
Использование измерительных блоков, в качестве которых используют акселерометры, установленные по трем осям измерения, известно, но использование двух дополнительных измерительных блоков акселерометров, установленных в горизонтальной плоскости для корректировки показаний гравиметра - измерительного блока акселерометра с электронным блоком аналого-цифрового преобразования, установленного по измерительной оси гравиметрической системы, ортогональной горизонтальной плоскости, является новым.
При введении в систему дополнительных двух измерительных блоков с электронными блоками аналого-цифрового преобразования, установленных по измерительной оси, появляется возможность, используя кворум-элемент, осуществлять известными методами [3] взаимный контроль работы измерительных блоков в процессе движения объекта, на котором устанавливается предлагаемая гравиметрическая система.
Информация, поступающая в кворум-элемент от всех трех измерительных блоков, обрабатывается, сравнивается и выбирается наиболее достоверная. Надежность получаемой при этом информации многократно увеличивается [3] по сравнению с использованием одного измерительного блока.
Сопоставительный анализ уровня техники с заявленным объектом показал, что совокупность существенных признаков заявленного объекта в части введения дополнительных измерительных блоков, в качестве которых использованы акселерометры, расположенные по двум взаимно перпендикулярным осям, лежащим в плоскости, ортогональной измерительной оси гравиметрической измерительной системы, для компенсации ошибок, обусловленных отклонением измерительной оси от местной вертикали, является новой.
Принцип избыточности и кворумирования широко используется для повышения достоверности информации, но введение дополнительных двух измерительных блоков, в качестве которых используются акселерометры, расположенных по измерительной оси гравиметрической измерительной системы, являются новым.
Результаты поиска известных решений в данной и смежной областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого изобретения, показали, что они не следуют явным образом из уровня техники.
Это дает основание полагать, что заявленное изобретение соответствует условиям патентоспособности "новизна" и "изобретательский уровень".
На фиг. 1 представлена структурно-функциональная схема предлагаемой гравиметрической измерительной системы, где
1, 3, 4, 6, 7 - измерительные блоки, в качестве которых используют акселерометры;
2,8,9 - электронные блоки аналого-цифрового преобразователя;
5 - вычислитель;
10 - кворум-элемент;
OZ - измерительная ось гравиметрической системы;
OX, OY - взаимно перпендикулярные измерительные оси, лежащие в плоскости XOY, ортогональной оси OZ.
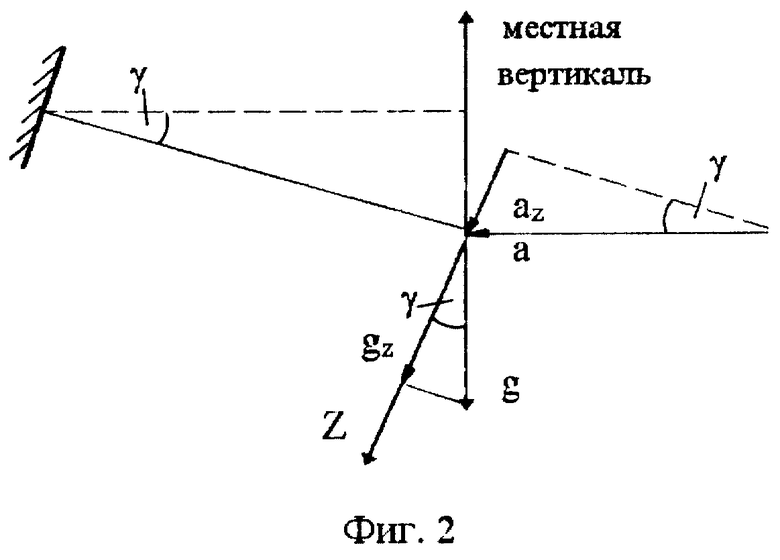
На фиг. 2 показана схема воздействия линейного ускорения и ускорения силы тяжести на первый измерительный блок 1, установленный по измерительной оси OZ.
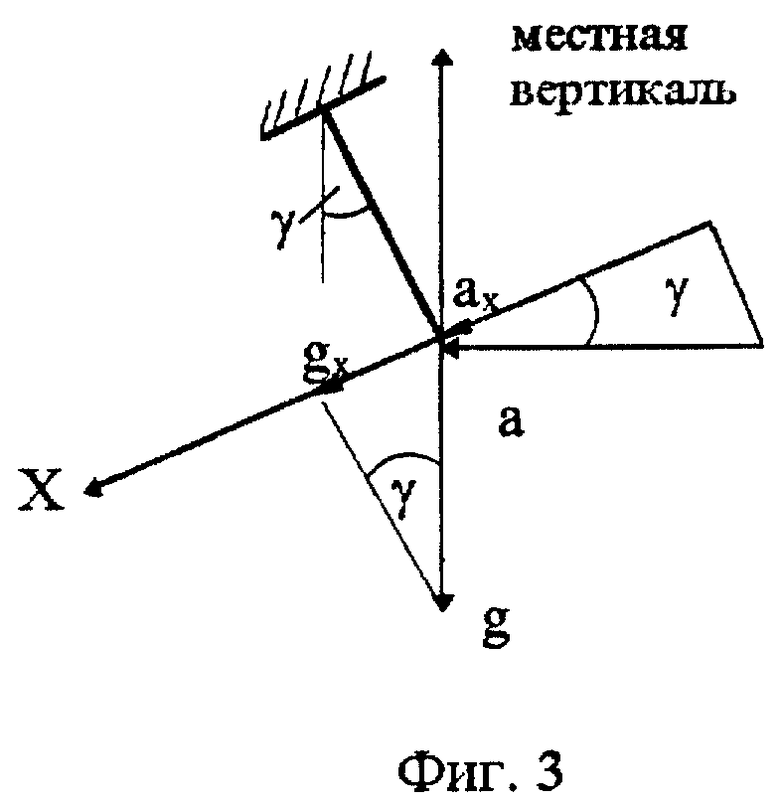
На фиг. 3 показана схема воздействия этих же ускорений на измерительный блок 3, когда ускорение a направлено по оси OX.
Работа гравиметрической измерительной системы осуществляется следующим образом. При воздействии ускорения силы тяжести аналоговый сигнал с чувствительных элементов акселерометров 1, 6, 7 поступает в электронные блоки 2, 8, 9, а оттуда, после соответствующих преобразований, в кворум-элемент 10. Поступающая в кворум-элемент информация анализируется и выбирается наиболее достоверная.
Однако полученная таким образом информация еще не свободна от ошибок, вызванных влиянием линейных ускорений движущегося объекта.
Как следует из фиг. 2, показания измерительного блока 1 можно записать в виде
gz = gz+az = gcosγ+asinγ (1)
Откуда ошибка измерения может быть определена по формуле
где
g - определяемая величина силы тяжести Земли;
Δgz - абсолютная ошибка измерений g;
γ - угол отклонения измерительной оси OZ от местной вертикали;
a - ускорение от движения объекта.
Угол γ (фиг. 2, 3) определяется по показаниям измерительных блоков 3 и 4 (фиг. 1) в процессе выставки гравиметрической системы
Величина ускорения a, действующего на систему (фиг. 3), определяется из выражения
Сигналы измерительных блоков 3, 4 и кворум-элемента 10 поступают в вычислитель 5 и там обрабатываются по формулам (1-4).
Первое слагаемое выражения (2) характеризует ошибку показаний гравиметрической системы, обусловленную неточностью ее выставки. При допустимом значении γ = 3 угл. мин. эта ошибка составляет величину порядка 0,5•10-6g (0,5 мГл), что находится на границе допустимых погрешностей системы.
Второе слагаемое выражения (2) характеризует ошибку показаний гравиметрической системы, обусловленную ускорением a от движущегося объекта при наличии ошибки выставки. При a - 0,1 g и γ = 3 угл. мин эта погрешность составляет величину порядка 10-4 g, что более чем на два порядка превышает допустимое значение (0,5 • 10-6 g).
Как следует из выражения (2), для устранения этих ошибок необходимо знать погрешность выставки (угол γ и величину ускорения a, воздействующего на гравиметрическую систему). С этой целью и устанавливают в измерительной системе по осям OX и OY измерительные блоки 3 и 4.
Таким образом, предложенное изобретение позволяет на два порядка повысить точность измерений гравиметрической системы при наличии линейных ускорений объекта по осям OX, OY и отклонении оси чувствительности гравиметра от местной вертикали и в 25 раз повысить надежность измерения гравитационного поля Земли в процессе полета.
Источники информации
1. Справочник геофизики "Гравиразведка", М., "Недра", с. 157-164.
2. Чесноков Г.И., Галкин В.И., Данильченко Ю.Д., Гравиметр, полезная модель G 01 V 15/08, N 96115450/20 от 19.08.96.
3. Браславский Д. А., Логунов С.С., Пельпор Д.С. Авиационные приборы и автоматы, М., Машиностроение, 1978.
Использование: для измерения гравитационного поля Земли с движущихся объектов - летательных аппаратов, плывущих кораблей и автомобилей. Сущность: система содержит измерительный блок, например акселерометр, установленный по измерительной оси системы, связанный с ним электронный блок аналого-цифрового преобразования и четыре дополнительных измерительных блока, аналогичных первому. Два из них установлены по двум взаимно перпендикулярным осям, лежащим в плоскости, ортогональной измерительной оси системы, и связаны с вычислителем, а два последних измерительных блока установлены на измерительной оси системы и связаны через дополнительные второй и третий электронные блоки аналого-цифрового преобразования и вновь введенный кворум-элемент, подключенный также к выходу первого электронного блока аналого-цифрового преобразования, с вычислителем. Технический результат: повышение точности и надежности измерений. 3 ил.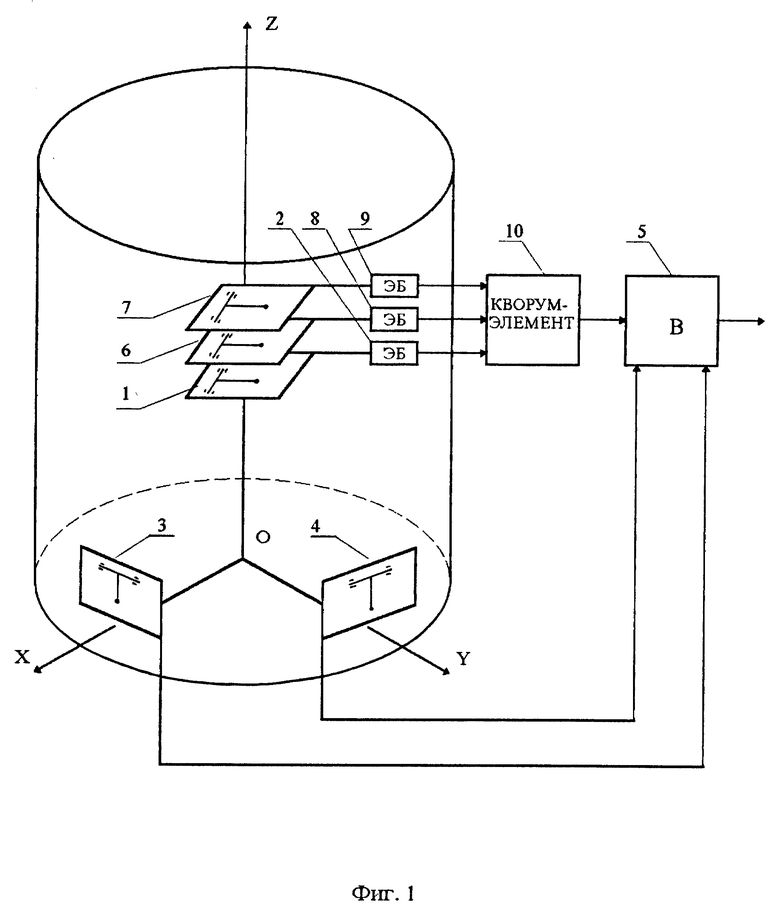
Гравиметрическая измерительная система, содержащая измерительный блок, например акселерометр, установленный по измерительной оси системы, и связанный с ним электронный блок аналого-цифрового преобразования, отличающаяся тем, что в нее дополнительно введены два измерительных блока, аналогичных первому, установленных по двум взаимно перпендикулярным осям, лежащим в плоскости, ортогональной измерительной оси системы, связанные, в свою очередь, с вновь введенным вычислителем, кроме того, в систему дополнительно введены четвертый и пятый измерительные блоки, аналогичные первому, установленные по измерительной оси системы, и связанные с ними соответственно второй и третий электронные блоки аналого-цифрового преобразования, причем выходы всех трех электронных блоков аналого-цифрового преобразования подключены через вновь введенный кворум-элемент к соответствующим входам вычислителя.
| УСТРОЙСТВО ДЛЯ УБОРКИ СНЕГА, БАЛЛАСТА И Т.П. С ЖЕЛ.-ДОР., ТРАМВАЙНЫХ И ГРУНТОВЫХ ПУТЕЙ С ПОГРУЗКОЙ НА ПЛАТФОРМЫ, РАСПОЛОЖЕННЫЕ ЗА БАЛЛАСТО-СНЕГООЧИСТИТЕЛЕМ И Т.П. НА ОЧИЩАЕМОМ ПУТИ | 1925 |
|
SU4011A1 |
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| US 3731538 A, 08.05.73 | |||
| DE 4013570 A1, 31.10.91 | |||
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
