Изобретение относится к силоизмерительной технике и может быть использовано в электронных весах, динамометрах, измерительных системах и других устройствах с датчиком силы.
Известен датчик силы, содержащий корпус в виде параллелограмма с полостью в боковой стенке с полукруглыми по ее углам сквозными выемками, образующими между верхней и нижней гранями упругие шарниры, над которыми на указанных гранях размещены тензочувствительные элементы, и коммутационный блок с аналого-цифровым преобразователем, закрепленный с помощью пластины на одной из боковых граней корпуса (Патент Англии N 2293453, G 01 L 1/22, G 01 G 3/14, публ. 1995 г.). Достоинство датчика - компактность, обеспечиваемая за счет размещения панели коммутационного блока около боковой грани и его выступающей части в полости корпуса, получение выходного сигнала в цифровом коде, недостаток - невысокая точность из-за отсутствия в нем температурной компенсации, ограниченность протоколов обмена данными с внешними устройствами, обусловленная типом применяемого аналого-цифрового преобразователя и сложность получения нормированных характеристик датчика.
Известен датчик силы, содержащий корпус в виде параллелограмма с полостью в боковой стенке с полукруглыми по ее углам сквозными выемками, образующими между верхней и нижней гранями упругие шарниры, вертикальную упругую балку прямоугольного сечения, выполненную в полости, на поперечных стенках которой размещены чувствительные элементы в виде пьезопластин, схемы возбуждения, соединенные с пьезопластинами, и температурный датчик, размещенные на корпусе (Патент ЕР N 0634006, G 01 L 1/22, G 01 G 3/14, G 01 L 1/16, публ. 1995 г., фиг. 1, 13). Недостаток датчика - необходимость наличия специализированной вторичной аппаратуры для обеспечения работы датчика, что существенно усложняет его эксплуатацию и сужает область применения.
Известен датчик силы, содержащий корпус в виде параллелограмма с полостью в боковой стенке, образованной тремя параллельно расположенными по середине боковой стенки круглыми отверстиями - одним центральным и двумя боковыми сквозными отверстиями, последние по сравнению с центральным имеют больший диаметр и образуют между верхней и нижней гранями корпуса упругие шарниры, в центральном отверстии выполнена вертикальная упругая балка прямоугольного сечения со сквозным отверстием и сегментальными выемками в поперечных стенках, на боковых поверхностях которой закреплены чувствительные элементы в виде двух пьезопластин, оси которых взаимно перпендикулярны и расположены под углом 45o к продольной оси корпуса, а точка пересечения этих осей совпадает с центром сквозного отверстия упругой балки (Патент РФ N 2130593, G 01 L 1/22, публ. 1999 г. - ближайший аналог).
Недостатками указанного аналога являются:
- невозможность получения выходного сигнала в цифровом коде;
- сложность получения нормированных характеристик датчика;
- отсутствие температурной компенсации датчика;
- необходимость наличия специализированной вторичной аппаратуры для обеспечения работы датчика;
- сложность использования датчика в распределенных измерительных системах.
Из-за указанных недостатков ближайший аналог обладает невысокой точностью, сложностью эксплуатации и ограниченной областью применения.
Техническим результатом, на который направлено изобретение, является повышение точности, упрощение эксплуатации и расширение области применения датчика.
Указанный результат достигается тем, что интеллектуальный датчик силы содержит корпус в виде параллелограмма с полостью в боковой стенке, образованной тремя параллельно расположенными по середине боковой стенки круглыми отверстиями - одним центральным и двумя боковыми сквозными отверстиями, последние по сравнению с центральным имеют больший диаметр и образуют между верхней и нижней гранями корпуса упругие шарниры, в центральном отверстии выполнена вертикальная упругая балка прямоугольного сечения со сквозным отверстием и сегментальными выемками в поперечных стенках, на боковых поверхностях которой закреплены чувствительные элементы в виде двух пьезопластин, оси которых взаимно перпендикулярны и расположены под углом 45o к продольной оси корпуса, а точка пересечения этих осей совпадает с центром сквозного отверстия упругой балки, температурный датчик, закрепленный на стенке полости, блок контроллера с преобразователями в виде платы, закрепленный в продольной выемке на одной из боковых граней корпуса, выполненной между полостью и торцевой гранью закрепляемого конца корпуса, и коммуникационный кабель, проходящий через поперечное сквозное отверстие, выполненное в боковой стенке под блоком контроллера, при этом блок контроллера с преобразователями включает в себя две схемы возбуждения, входы которых соединены с электродами пьезопластин, сумматор, входы которого соединены с выходами схем возбуждения, детектор разностной частоты, вход которого соединен с выходом сумматора, микроконтроллер с интегрированной энергонезависимой памятью, программной реализацией аналого-цифрового преобразования сигналов разностной частоты, программно-аппаратной реализацией аналого-цифрового преобразования сигналов датчика температуры и программами обработки и выдачи информации, входы которого соединены с выходом температурного датчика, с выходом задающего генератора и с выходом детектора разностной частоты, преобразователь уровней, вход которого двухсторонней связью соединен микроконтроллером, и коммуникационный порт, вход которого двухсторонней связью соединен с преобразователем уровней, а выход соединен с коммуникационным кабелем.
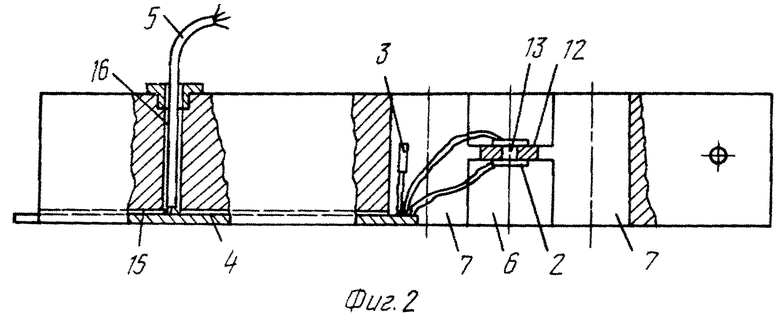
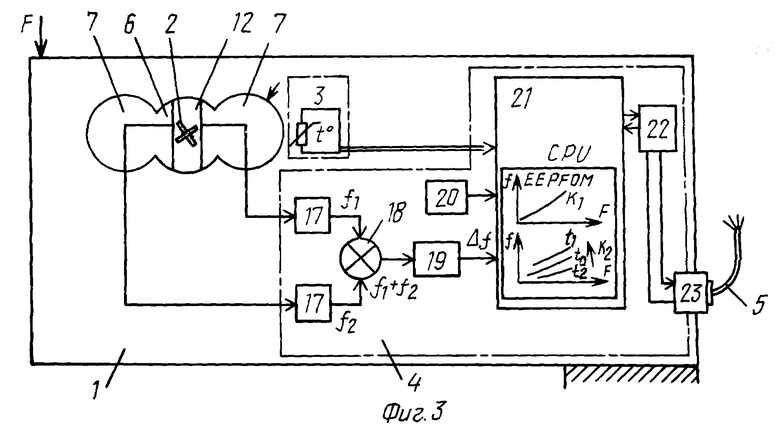
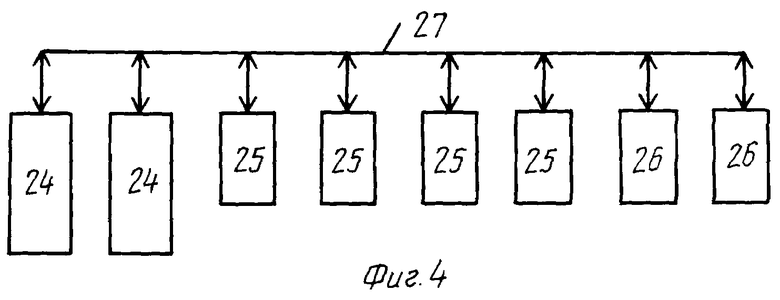
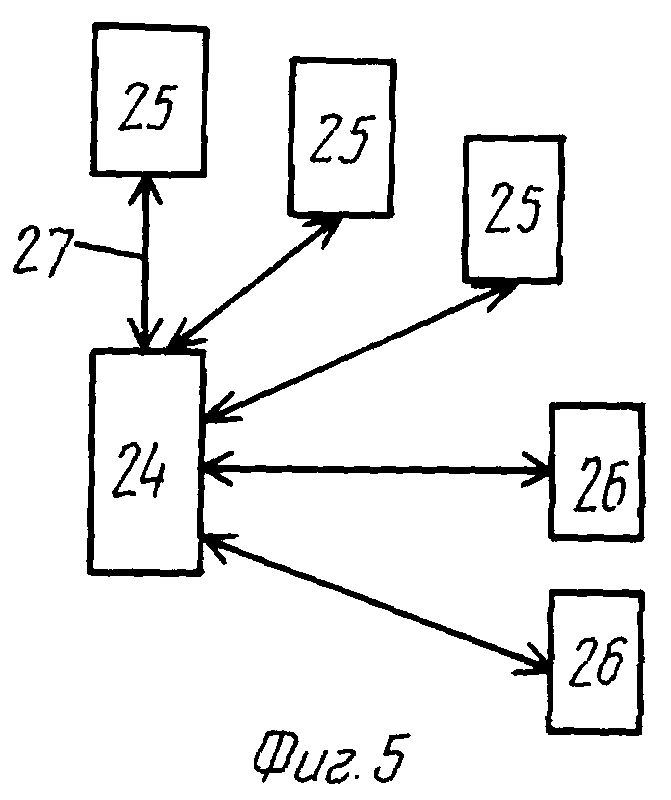
На фиг. 1 показан общий вид интеллектуального датчика силы, на фиг. 2 - вид его сверху, на фиг. 3 - функциональная схема датчика, на фиг. 4 - схема распределенной измерительной системы типа "Общая шина" и на фиг. 5 - схема распределенной измерительной системы типа "Звезда".
Интеллектуальный датчик силы (фиг. 1 - 3) состоит из корпуса 1, пьезопластин 2, температурного датчика 3, блока контроллера с преобразователями в виде платы 4 и коммуникационного кабеля 5.
Корпус 1 выполнен в виде параллелограмма с полостью в боковой стенке, образованной тремя параллельно расположенными по середине боковой стенки круглыми отверстиями - одного центрального 6 и двух боковых сквозных отверстий 7. Последние по сравнению с центральным отверстием имеют больший диаметр и образуют между верхней и нижней гранями корпуса упругие шарниры 8, 9, 10, 11. В центральном отверстии за одно целое с корпусом выполнена вертикальная упругая балка 12 прямоугольного сечения со сквозным отверстием 13 и сегментальными выемками 14 на поперечных стенках, образованными боковыми отверстиями 7. На боковых поверхностях этой балки закреплены чувствительные элементы в виде двух пьезопластин 2, оси которых взаимно перпендикулярны и расположены под углом 45 к продольной оси корпуса, а точка пересечения этих осей совпадает с центром отверстия 13. На стенке полости корпуса (например, на стенке ближайшего к закрепляемому концу корпуса бокового отверстия 7) закреплен температурный датчик 3, а на одной из боковых граней корпуса между его полостью и торцевой гранью упомянутого конца корпус имеет продольную выемку 15, в которой закреплен блок контроллера с преобразователями 4. Под блоком контроллера в боковой стенке корпуса выполнено поперечное сквозное отверстие 16 для прокладки коммуникационного кабеля 5.
Блок контроллера с преобразователями в виде платы 4 (фиг. 1, 3) состоит из двух схем возбуждения 17, входы которых соединены с электродами пьезопластин 2, сумматора 18, входы которого соединены с выходами схем возбуждения 17, детектора разностной частоты 19, вход которого соединен с выходом сумматора 18, задающего генератора 20, микроконтроллера 21 с интегрированной энергонезависимой памятью, программной реализацией аналого-цифрового преобразования сигналов разностной частоты, программно-аппаратной реализацией аналого-цифрового преобразования сигналов датчика температуры и программами обработки и выдачи информации, входы которого соединены с выходом температурного датчика 3, с выходом задающего генератора 20 и с выходом детектора разностной частоты 19, преобразователя уровней 22, вход которого двухсторонней связью соединен с выходом микроконтроллера 21, и коммуникационного порта 23, вход которого двухсторонней связью соединен с выходом преобразователя уровней 22, а выход соединен с кабелем 5.
Работа интеллектуального датчика силы осуществляется следующим образом (фиг. 3).
Под действием измеряемой силы (веса) F на корпус 1 датчика происходит изменение частот возбуждения пьезопластин 2, генерируемых схемами возбуждения 17. Эти частоты (f1 и f2) поступают в сумматор 18, сигнал с которого поступает в детектор разностной частоты 19. В детекторе происходит выделение разности частот Δf, и разностный сигнал с него подается в микроконтроллер 21, синхронизированный задающим генератором 20. Сигнал с датчика температуры 3 также поступает в микроконтроллер 21. Далее в микроконтроллере 21 на основании коэффициентов чувствительности и с учетом коэффициентов термочувствительности, хранимых в интегральной энергонезависимой памяти, осуществляется соответственно программная реализация аналого-цифрового преобразования сигнала разностной частоты и программно-аппаратная реализация аналого-цифрового преобразования сигнала температуры и последующее вычисление силы (веса) F, значение которой через преобразователь уровней 22 в цифровом коде в виде протокола поступает в коммуникационный порт 23 для передачи по кабелю 5 последующим устройствам сбора и отображения информации. Кроме информации о силе F, датчик позволяет выдавать также и значение температуры в цифровом коде.
Интеллектуальный датчик силы имеет нормированные характеристики. Он полностью компенсирован, прост по своей конструкции, миниатюрен, обладает высокой технологичностью, множественностью протоколов и сред обмена, возможностью автоматизации процессов настройки. Прост в эксплуатации, так как измеряемые им величины на его выходе выдаются в цифровом коде, а для обеспечения его работы не требуется вторичная аппаратура. Датчик обладает большими возможностями построения на его основе различных распределенных измерительных систем (одно- или многодатчиковых). Многодатчиковые системы могут включать в себя до нескольких сот датчиков и состоять не только из одних интеллектуальных датчиков силы, но и включать другие типы датчиков и управляющих устройств. Такие распределенные измерительные системы на основе интеллектуальных датчиков силы с множественностью протоколов и сред обмена могут создаваться как по типу "Общая шина" (фиг. 4), так и по типу "Звезда" (фиг. 5). Эти системы имеют систему сбора, обработки, отображения информации и выдачи управляющих сигналов 24, интеллектуальные датчики силы 25, другие типы датчиков и управляющих устройств 26 и канал связи 27. По управляющим сигналам упомянутые системы позволяют запросить, обработать, отобразить и выдать необходимую информацию с любого измерителя, входящего в систему.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК СИЛЫ | 1997 |
|
RU2130593C1 |
| ДАТЧИК СИЛЫ ЭЛЕКТРОННЫХ ВЕСОВ | 1991 |
|
RU2078318C1 |
| НАВИГАЦИОННАЯ СИСТЕМА И КОРПУС НАВИГАЦИОННОЙ СИСТЕМЫ | 2018 |
|
RU2702845C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2010 |
|
RU2437070C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2490203C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК ОБРАЗЦОВ ГОРНЫХ ПОРОД | 2005 |
|
RU2284413C1 |
| ЭЛЕКТРОННЫЙ СЧЕТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2000 |
|
RU2167427C1 |
| СПОСОБ РАБОТЫ УСТРОЙСТВА ИЗМЕРЕНИЯ СКОРОСТИ ПОТОКА СРЕДЫ МАГНИТОИНДУКЦИОННОГО РАСХОДОМЕРА (ВАРИАНТЫ) И МАГНИТОИНДУКЦИОННЫЙ РАСХОДОМЕР | 2009 |
|
RU2410646C2 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2716964C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
Изобретение относится к силоизмерительной технике и может быть использовано в электронных весах, динамометрах, измерительных системах и других устройствах с датчиком силы. Датчик содержит корпус, пьезопластины, датчик температуры, блок контроллера с преобразователями и коммуникационный кабель. Корпус выполнен с полостью, образованной тремя отверстиями. В полости выполнена упругая балка с закрепленными на ней пьезопластинами. Блок контроллера закреплен на боковой грани корпуса и соединен с электродами пьезопластин и датчиком температуры, закрепленным в полости. Блок контроллера состоит из схем возбуждения, сумматора, детектора разностной частоты, задающего генератора, микроконтроллера, преобразователя уровней и коммуникационного порта, к которому подключен кабель. Обработка сигналов, поступающих с пьезопластин и датчика температуры, вычисление и выдача информации о величине измеряемой силы в цифровом коде осуществляются во встроенном микроконтроллере программными и программно-аппаратными методами. Технический результат - повышение точности, упрощение эксплуатации и расширение области использования. 5 ил.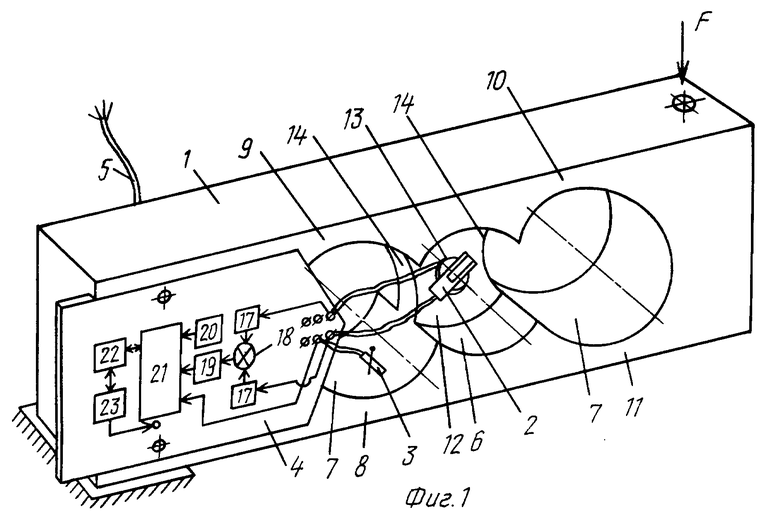
Датчик силы, содержащий корпус в виде параллелограмма с полостью в боковой стенке, образованной тремя параллельно расположенными посередине боковой стенки круглыми отверстиями - одним центральным и двумя боковыми, диаметр которых больше диаметра центрального отверстия, боковые отверстия образуют между верхней и нижней гранями корпуса упругие шарниры, в центральном отверстии выполнена вертикальная упругая балка прямоугольного сечения со сквозным отверстием и сегментальными выемками на поперечных стенках, на боковых поверхностях которой закреплены чувствительные элементы в виде двух пьезопластин, оси которых взаимно перпендикулярны и расположены под углом 45o к продольной оси корпуса, а точка пересечения этих осей совпадает с центром сквозного отверстия упругой балки, отличающийся тем, что он снабжен датчиком температуры, закрепленным на стенке полости корпуса, блоком контроллера с преобразователями в виде платы, закрепленным в продольной выемке на одной из боковых граней корпуса, выполненной между полостью и торцевой гранью закрепляемого конца корпуса, и коммуникационным кабелем, проходящим через поперечное сквозное отверстие, выполненное в боковой стенке под блоком контроллера, при этом блок контроллера с преобразователями выполнен из двух схем возбуждения, входы которых соединены с электродами пьезопластин, сумматора, входы которого соединены с выходами
схем возбуждения, детектора разностной частоты, вход которого соединен с выходом сумматора, задающего генератора, микроконтроллера с интегрированной энергонезависимой памятью, программной реализацией аналого-цифрового преобразования сигналов разностной частоты, программно-аппаратной реализацией сигналов датчика температуры и программами обработки и выдачи информации, входы которого соединены с выходом датчика температуры, с выходом задающего генератора и с выходом детектора разностной частоты, а также преобразователя уровней, вход которого двусторонней связью соединен с выходом микроконтроллера, и коммуникационного порта, вход которого двусторонней связью соединен с выходом преобразователя уровней, а выход - с коммуникационным кабелем.
| ДАТЧИК СИЛЫ | 1997 |
|
RU2130593C1 |
| ДАТЧИК ДЛЯ ТЕНЗОМЕТРИЧЕСКИХ ВЕСОВ | 1996 |
|
RU2102710C1 |
| US 5183125 A, 02.02.1993 | |||
| Способ получения сульфолана | 1970 |
|
SU401133A1 |
| US 4419902 A, 13.12.1983. | |||

