Изобретение относится к способам пространственной интерполяции восстановления рельефа морского дна при дискретных измерениях глубин посредством эхолокаторов и может быть использовано при выполнении метеорологических интерполяций, включая анализ ветровых полей, анализ радиологического и химического загрязнения, топографические интерполяции и другие.
Известно устройство для распознавания морского грунта путем измерения параметров эхо-сигнала при зондировании дна прямоугольными импульсами [1]. В зависимости от типа грунта эхо-сигнал при нормальном падении на дно изменяет свою форму в широких пределах от теоретически неискаженного прямоугольного импульса на монолитах до существенно широкого импульса с весьма пологим фронтом и длительностью, в несколько раз превышающей длительность посылки на грунте, представляющим собой жидкую массу. В качестве информативного параметра используется крутизна фронта нарастания эхо-сигнала, которая измеряется и сравнивается с заранее проградуированной сеткой с нанесенными на нее границами жесткости для различных типов грунта. Так как практически невозможно перекрыть зондирующими сигналами всю исследуемую площадь, то для дальнейшего построения поверхности рельефа дна или получения рельефа некоторой двумерной скалярной геопространственной характеристики применяют методы линейной и нелинейной интерполяции (см., например, Проблемы окружающей среды и природных ресурсов. М., ВИНИТИ, 1999, №11, с.13). Помимо основного недостатка, заключающегося в низкой достоверности распознавания морского грунта, обусловленной тем, что крутизна нарастания эхо-сигнала определяется главным образом акустическими свойствами границы раздела вода/грунт, а не всей толщины грунта, то при наличии на поверхности жидкого грунта неровностей или каменистых отложений крутизна нарастания фронта эхо-сигнала определяется отражательными свойствами неровностей или отложений, что приводит к получению завышенных значений жесткости грунта, а в сочетании с последующим восстановлением поверхности рельефа по интерполяции измерений может привести к необоснованным решениям и, следовательно, к существенным потерям в реализации конкретной задачи.
В известном техническом решении [2], представляющим собой эхолокатор для распознавания морских грунтов, благодаря тому, что определяется степень физического состояния грунта по величине удлинения эхоимпульса, исходя из зависимости удлинения эхо-сигнала от физико-механических характеристик грунта обеспечивается повышение точности определения параметров отражающей границы и достоверности результатов измерений по сравнению с техническим решением [1]. Однако восстановление рельефа по всей исследуемой поверхности сводится к применению формального метода интерполяции по измеренным величинам, что приводит к существенным потерям в реализации конкретной задачи.
В известном способе [3], представляющем собой способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления, включающем излучение гидроакустического сигнала в сторону дна и прием отраженных сигналов в двух точках, расположенных по вертикали на заданном расстоянии, измерение времени задержки синфазных сигналов, угла бортовой качки носителя антенн и определение по полученным данным направлений прихода синфазных сигналов и искомых глубин акватории расчетным путем, в котором измеряют время задержки прихода отраженного гидроакустического сигнала по вертикали, определяют время задержки прихода тех же синфазных сигналов в случае их отражения от ровной поверхности дна по каждому расчетному направлению в соответствии с математическим выражением с определением сходимости вычисленных и измеренных значений времени задержки.
Определение сходимости вычисленных и измеренных значений позволяет уменьшить погрешность определения глубины акватории при проведении съемки рельефа дна акватории. Однако реализация данного способа требует выполнения предварительных вычислений для определения расчетных направлений, что обеспечивается при условии использования результатов ранее проводимых съемок на данной акватории. Так как с течением времени структура поверхности грунта не остается постоянной в силу изменчивости гидродинамических геофизических факторов, то использование расчетных данных не всегда является корректным и может привести к существенным погрешностям получения конечных результатов при съемке рельефа дна. Кроме того, восстановление рельефа дна по всей исследуемой поверхности, как и в известных технических решениях [1, 2], сводится к применению формального метода интерполяции по измеренным дискретным величинам, что приводит к существенным потерям в реализации конкретных задач, в частности при формализации результатов измерений в картографическую продукцию.
При использовании известных способов решение задачи восстановления рельефа сводится к построению непрерывной двумерной функции, проходящей через измеренные дискретные значения глубины. При этом на первом этапе производится триангулирование точек измерения, т.е. на множестве точек измерения вводится отношения "близости" точек, а на втором этапе строится собственно искомая функция, как композиция элементарных весовых функций (линейных или нелинейных). При такой обработке исходной информации свойства рельефа никак не учитываются, и в процессе обработки возникают артефакты ложных гребней и ложбин в форме рельефа, и, следовательно, именно на этом этапе нарушается морфологический способ восстановления рельефа.
Выявленных недостатков лишен известный способ восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающий измерение глубины с определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, в котором при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио и спутниковых навигационных систем, при этом определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженного от дна сигнала с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0,t), где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<A|r2-r1|λ, где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1. при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа, а устройство для осуществления способа, представляющее собой гидролокатор для определения глубин акватории, содержащее функционально соединенные первую и вторую антенны, одна из которых излучающая, а вторая приемная, формирующие приемоизлучающие каналы, вычислитель, блок управления, в котором блок управления соединен с приемоизлучающими каналами, вычислителем, в которое дополнительно введены формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт, который своим выходом соединен с излучающей антенной, а входом соединен с выходом формирователя накачки, который своим выходом соединен с выходом блока управления, графопостроитель своими входами соединен с выходами вычислителя и блока управления [4].
В отличие от известных технических решений [1, 2, 3], в которых определение поправки выполняется путем определения средней вертикальной скорости распространения звука в воде посредством определения гидрологических параметров путем измерения температуры и солености на стандартных горизонтах или путем измерения скорости распространения звука в воде на разных горизонтах путем установки дополнительных датчиков в водной среде, соединенных линией связи с носителем измерительной аппаратуры глубины, в известном техническом решении [4] дополнительно измеряют доплеровский сдвиг опорного сигнала и скорость движения носителя по внешним источникам информации, по которым определяют среднюю вертикальную скорость распространения звука в водной среде, по полученным значениям которой определяют поправку, что обеспечивает возможность непрерывного контроля за изменением средней вертикальной скорости распространения звука в морской воде в процессе выполнения мониторинга за состоянием Мирового океана, упрощает процесс определения средней вертикальной скорости распространения звука в водной среде с требуемой точностью для определения поправок измеренных значений глубин, а также исключает необходимость применения специальной дополнительной аппаратуры.
При использовании данного способа выполняются требования к точности определения глубины при промерных работах, установленные действующими нормативными документами в части обеспечения судоходства, что обусловлено возможностью измерения доплеровского сдвига опорного сигнала гидроакустического лага и скорости движения носителя измерительной аппаратуры глубины по внешним источникам информации, по которым определяют среднюю вертикальную скорость распространения звука в водной среде.
Восстановление формы рельефа дна по дискретным измерениям выполняют путем интегральных преобразований, что не приводит к увеличению ошибок наблюдений в исходных данных при обработке в отличие от известных методов, имеющих дифференциальный характер.
Методы обработки наборов однородных полиномов являются наиболее разработанными методами в компьютерной алгебре, а комбинаторный метод анализа геопространственных полей по точечным измерениям позволяет решать прикладные задачи с учетом пространственно-временной динамики этих полей.
Применение известного способа восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах [4] в основном ограничено решением двух технических задач - это выполнение съемки рельефа дна с последующим составлением карт для обеспечения судоходства и определение средней вертикальной скорости распространения звука в водной среде на разных горизонтах для изучения процессов перемещения водных слоев.
В то же время имеется ряд задач, включающих проведение экологического состояния морских акваторий в местах расположения морских нефтегазовых терминалов и определение параметров границ загрязненных акваторий и континентальных шельфов и определения биоресурсов.
Определение параметров границ континентального шельфа требует выполнения работ по инвентаризации и составлению берегового кадастра прибрежной зоны, включая составление карт кадастровой съемки и топографических планов.
Отсутствие карт кадастровой съемки и топографических планов морских акваторий континентального шельфа с правовой точки зрения затрудняет прибрежное гидротехническое строительство, что связано с определением границ прибрежной зоны. Кроме того, существуют возможные коллизии при определении границ морских водоохранных зон и прибрежных защитных полос, которые в соответствии с Водным кодексом РФ 2006 г. в редакции Федерального закона от 14.07.2008 №118-ФЗ отсчитываются от линии максимального прилива.
Задачей заявляемого технического решения является расширение функциональных возможностей с одновременным повышением достоверности восстановления формы рельефа морского дна при дискретных измерениях глубин посредством эхолокатора.
Поставленная задача решается за счет того, что в способе восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающем измерение глубины с определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио и спутниковых навигационных систем, при этом определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженного от дна сигнала с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0,t), где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<A|r2-r1|λ, где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа, в котором в отличие от прототипа дополнительно в период формирования временных рядов плотности звуковой энергии определяют число эхо-сигналов от зарегистрированных неоднородностей, одновременно с профилированием дна гидролокатором выполняют профилирование дна высокочастотным профилографом, низкочастотным параметрическим профилографом и многолучевым эхолотом, определяют колебания уровня моря, определяют прочностные характеристики грунта по измеренным коэффициентам сопротивления и трения от береговой линии до границ континентального шельфа, формируют кадастровые карты с учетом восстановленного рельефа дна и карты разрезов грунта по прочностным характеристикам грунта, при визуализации зарегистрированной области рельефа дна выполняют вывод геопространственных данных в двумерном и трехмерном представлении в виде структуры данных в формате SVG, построение профиля рельефа по разрезу выполняется путем интерполяции точек вертикального разреза грунта в виде рациональных двумерных сплайн-функций NURBS, аппроксимацию характерных точек разреза выполняют на основе кубического сплайна с нулевыми граничными производными, при картировании результатов характеристик грунтов континентального шельфа наносят геодезические координаты точек установки пенетрометров с отображением разрезов грунта, при этом расстояние между разрезами не превышает половины минимального диаметра неоднородностей, а при регистрации неоднородностей частота измерений на разрезах составляет более 1/8÷1/10 диаметра неоднородностей, а устройство для осуществления способа, представляющее собой гидролокатор для определения глубин акватории, содержащее функционально соединенные первую и вторую антенны, одна из которых излучающая, а вторая приемная, формирующие приемоизлучающие каналы, вычислитель, блок управления, в котором блок управления соединен с приемоизлучающими каналами, вычислителем, в которое дополнительно введены формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт, который своим выходом соединен с излучающей антенной, а входом соединен с выходом формирователя накачки, который своим выходом соединен с выходом блока управления, графопостроитель своими входами соединен с выходами вычислителя и блока управления, в отличие от прототипа дополнительно введены второй гидролокатор бокового обзора, многоканальный генератор зондирующих импульсов, многоканальный приемник эхо-сигналов, блок функционального управления, многолучевой эхолот, высокочастотный профилограф, низкочастотный параметрический профилограф, блок пенетрометров, блок мареографов, блок визуализации, при этом низкочастотный параметрический профилограф своими входами соединен с выходом формирователя сигналов накачки и выходом многоканального генератора зондирующих импульсов, который другими выходами соединен со входами второго гидролокатора бокового обзора, высокочастотного профилографа и многолучевого эхолота соответственно, многоканальный приемник эхо-сигналов своими выходами соединен с входами блока функционального управления, который своим выходом соединен со входом вычислителя и входом выходом с входом-выходом блока управления, блок мареографов и блок пенетрометров по гидроакустическому каналу связи соединены с блоком функционального управления, блок визуализации своими входами соединен с выходами блока функционального управления, блока управления, вычислителя и графопостроителя соответственно.
Новые отличительные признаки заявляемого технического решения, заключающиеся в том, что дополнительно в период формирования временных рядов плотности звуковой энергии определяют число эхо-сигналов от зарегистрированных неоднородностей, одновременно с профилированием дна гидролокатором выполняют профилирование дна высокочастотным профилографом, низкочастотным параметрическим профилографом и многолучевым эхолотом, определяют прочностные характеристики грунта по измеренным коэффициентам сопротивления и трения от береговой линии до границ континентального шельфа, формируют кадастровые карты с учетом восстановленного рельефа дна и карты разрезов грунта по прочностным характеристикам грунта, при визуализации зарегистрированной области рельефа дна выполняют вывод геопространственных данных в двумерном и трехмерном представлении в виде структуры данных в формате SVG, построение профиля рельефа по разрезу выполняется путем интерполяции точек вертикального разреза грунта в виде рациональных двумерных сплайн-функций NURBS, аппроксимацию характерных точек разреза выполняют на основе кубического сплайна с нулевыми граничными производными, при картировании результатов характеристик грунтов континентального шельфа наносят геодезические координаты точек установки пенетрометров с отображением разрезов грунта, при этом расстояние между разрезами не превышает половины минимального диаметра неоднородностей, а при регистрации неоднородностей частота измерений на разрезах составляет более 1/8÷1/10 диаметра неоднородностей, а устройство для осуществления способа, представляющее собой гидролокатор для определения глубин акватории, содержащее функционально соединенные первую и вторую антенны, одна из которых излучающая, а вторая приемная, формирующие приемоизлучающие каналы, вычислитель, блок управления, в котором блок управления соединен с приемоизлучающими каналами, вычислителем, в которое дополнительно введены формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт, который своим выходом соединен с излучающей антенной, а входом соединен с выходом формирователя накачки, который своим выходом соединен с выходом блока управления, графопостроитель своими входами соединен с выходами вычислителя и блока управления, в отличие от прототипа дополнительно введены второй гидролокатор бокового обзора, многоканальный генератор зондирующих импульсов, многоканальный приемник эхо-сигналов, блок функционального управления, многолучевой эхолот, высокочастотный профилограф, низкочастотный параметрический профилограф, блок пенетрометров, блок мареографов, блок визуализации, при этом низкочастотный параметрический профилограф своими входами соединен с выходом формирователя сигналов накачки и выходом многоканального генератора зондирующих импульсов, который другими выходами соединен со входами второго гидролокатора бокового обзора, высокочастотного профилографа и многолучевого эхолота соответственно, многоканальный приемник эхо-сигналов своими выходами соединен с входами блока функционального управления, который своим выходом соединен со входом вычислителя и входом выходом с входом-выходом блока управления, блок мареографов и блок пенетрометров по гидроакустическому каналу связи соединены с блоком функционального управления, блок визуализации своими входами соединен с выходами блока функционального управления, блока управления, вычислителя и графопостроителя соответственно, позволяют решить задачи экологического мониторинга, определения биоресурсов, определения параметров границ континентального шельфа.
Новые отличительные признаки из известного уровня техники не выявлены, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности "изобретательский уровень".
Сущность предлагаемого способа и устройства для его осуществления поясняется чертежами (фиг.1, фиг.2).
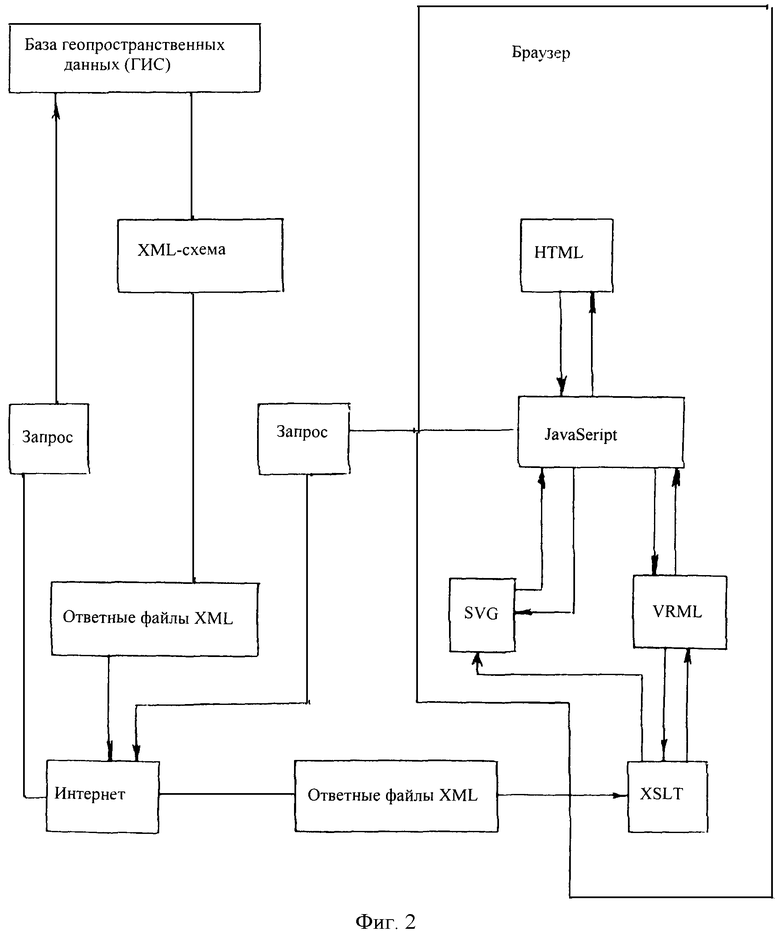
Фиг.1. Блок-схема устройства включает формирователь сигналов накачки 1, предназначенный для формирования двухчастотных зондирующих сигналов накачки с заданной длительностью и заданной модуляцией, формирование импульсов синхронизации и сигналов стробирования приемного тракта, параметрический излучающий тракт 2, предназначенный для усиления сигналов накачки по обеим частотам до номинального уровня (при этом в отдельных каналах может осуществляться коррекция фаз амплитуд), излучающий преобразователь накачки 3, предназначенный для преобразования электрических сигналов в акустические сигналы необходимой характеристики направленности, приемную антенну сигналов разностной частоты 4, предназначенную для формирования характеристики направленности для приема и образования акустических волн разностной частоты в электрические сигналы, приемный тракт 5, предназначенный для предварительной обработки принятых сигналов и усиления их до уровня, необходимого для регистрации принятых сигналов, графопостроитель 6, блок управления 7, вычислитель 8, гидроакустический лаг 9, многолучевой эхолот 10, высокочастотный профилограф 11, низкочастотный параметрический профилограф 12, блок пенетрометров 13, блок мареографов 14, многоканальный генератор зондирующих импульсов 15, многоканальный приемник эхо-сигналов 16, второй гидролокатор бокового обзора 17, блок визуализации 18.
Фиг.2. Алгоритм визуализации зарегистрированной области рельефа
Принципиальные схемы и принцип работы устройств 1-9 аналогичны принципиальным схемам и принципу работы устройств прототипа [4].
Многолучевой эхолот 10 предназначен для поиска рыбных скоплений, количественной оценки запасов и профилирования дна на рабочей частоте 204 кГц, при ширине характеристики направленности 6×10 градусов и 12×20 градусов и длительности импульсов 50, 200, 500 мкс в диапазонах глубины 5, 10, 20, 50, 100 и 200 м.
Второй гидролокатор бокового обзора 17, как и первый (устройство прототипа), предназначен для съемки рельефа дна по второму борту судна и поиска и количественной оценки рыбных скоплений и одиночных рыб в стороне от судна. Рабочая частота гидролокаторов составляет 286 и 320 кГц, ширина характеристики направленности 1,5×50 и 3×50 градусов при длительности импульсов 50, 100 мкс и 1 мс в диапазоне глубин 10, 20, 50, 100 и 200 м.
Высокочастотный профилограф 11 предназначен для точного профилирования рельефа дна.
Низкочастотный параметрический профилограф 12 предназначен для профилирования придонных осадков с рабочими частотами 10 и 150 кГц, при ширине характеристики направленности 3×4 градуса и длительности импульсов 0,5, 1 и 2 мс в диапазоне глубин 10, 20, 50, 100 и 200 м.
Многоканальный генератор зондирующих импульсов 15 содержит излучающие тракты многолучевого эхолота 10 первого и второго гидролокаторов бокового обзора, генераторы накачки низкочастотного параметрического профилографа 12.
Многоканальный приемник эхо-сигналов 16 содержит приемные тракты многолучевого эхолота 10 первого и второго гидролокаторов бокового обзора высокочастотного профилографа 11, низкочастотного параметрического профилографа 12, четыре сигнальных процессора, предназначенных для преобразования аналоговых сигналов в цифровую форму и первичную обработку этих сигналов, интерфейс связи, схему управления, формирователь сигналов, схему временной автоматической регулировки усиления и преобразователя сигналов датчиков.
Пенетрометр 13 предназначен для определения ненарушенных структур грунта в условиях его естественного залегания и представляет собой конусовидный снаряд, оснащенный датчиками, которые под воздействием силы тяжести или с помощью бура заглубляются в грунт. По измеренным коэффициентам сопротивления и трения определяются прочностные характеристики грунта. В зависимости от рабочей глубины в диапазоне 0,5-2000 м используется набор датчиков с глубиной проникновения в грунт на расстояние от 3 до 20 м. Аналогами являются пенетрометры типа ТМ - 153 и СРТ.
Мареограф 14 предназначен для регистрации колебаний уровня моря. В зависимости от глубины водной среды используются автоматические мареографы типа АМП-20 и АММ-200.
Для получения ежесуточной информации о характере колебаний уровня моря мареографы устанавливают в разных точках морской среды в направлении от береговой линии. Информация, зарегистрированная мареографами, используется для исправления измеренных глубин при съемке рельефа дна на акваториях, где уровневые посты обычного типа не обеспечивают достаточной точности или использование их затруднено, а также для определения характера прилива и его гармонических составляющих при решении задач, связанных с безопасной эксплуатацией морских терминалов, включая нефтегазовые месторождения. Результаты измерений транслируются на судно по радио и гидроакустическому каналу связи.
Блок визуализации 18 представляет собой аппаратные вычислительные и видеосредства с программным обеспечением для отображения выбранной информации (подводные пики, впадины, магистральные трубопроводы, области загрязнения, разрезы грунта, продукты биосферы) в двумерном или трехмерном представлении.
Способ реализуется следующим образом.
При движении судна на заданной акватории съемки рельефа дна галсами, расположенными от береговой линии в сторону моря, посредством первого и второго гидролокаторов бокового обзора, установленных с правого и левого бортов судна, выполняют съемку рельефа дна, поиск и количественную оценку продуктов биосферы (как скоплений, так и единичных экземпляров), посредством многолучевого эхолота 10 выполняют профилирование дна и поиск продуктов биосферы, посредством высокочастотного профилографа 11 выполняют профилирование дна, посредством низкочастотного параметрического профилографа 12 выполняют профилирование придонных осадков. Синхронно с зондированием поверхности дна и процессом определения глубин определяют вертикальную скорость распространения звука в водной среде посредством гидроакустического лага 9, посредством блока мареографов 14 определяют колебания уровня моря и посредством штатных судовых приемоиндикаторов спутниковых или радионавигационных систем определяют координаты и скорость судна.
По полученным данным определяют поправку к глубинам по известным зависимостям и алгоритмам и вводят ее в вычислитель 8. Измеренные значения глубин обрабатывают по известным алгоритмам, как и в прототипе. По измеренным значениям скорости звука в воде в вертикальной плоскости определяют поле скорости звука. Определение вертикального распределения скорости звука в воде по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, выполняют, как и в прототипе, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженных от дна сигналов с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна. При этом скорость звука в воде определяют путем решения обратной задачи рассеяния с регистрацией низкочастотных волн накачки посредством искусственно возбуждаемых высокочастотных волн накачки, по которым судят о взаимной ориентации взаимодействующих волн и величине параметра нелинейности среды.
Далее выполняется обработка временных рядов и процедура определения параметров сложно-неоднородной среды согласно алгоритмам, предложенным в прототипе.
По полученным дискретным измерениям значений глубин, а также с учетом коэффициентов рассеяния звука дном определяют класс функций, к которому принадлежит рельеф.
Проведенные исследования формы рельефа в различных пространственных масштабах (согласно протипа) показали, что относительные изменения высоты рельефа степенным образом связанны с пространственным масштабом в виде
|h(r2)-h(r1)|<A|r2-r1|λ, где
h(r2)-h(r1) - разность высот в двух пространственных точках;
r1, r2, А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1.
При этом искомая функция Н(r) выражается в виде обратного преобразования Фурье:
Н(х,у)=ℑ(F(ζ)), где ζ - оператор обратного преобразования Фурье,
 .
.
Здесь i - мнимая единица, ξ=(cosφ, sinφ),
 ,
,
k=0,1,2…
Здесь
 - преобразование Радона функции H(x, y) на (х, у)∈R×R=Ω, т.е. интегральное преобразование, относящее функции Н(х, у) на Ω ее интегралы по всевозможным прямым (относительно евклидовой длины): х=-tsinφ+pcosφ; у=tcosφ+psinφ.
- преобразование Радона функции H(x, y) на (х, у)∈R×R=Ω, т.е. интегральное преобразование, относящее функции Н(х, у) на Ω ее интегралы по всевозможным прямым (относительно евклидовой длины): х=-tsinφ+pcosφ; у=tcosφ+psinφ.
Для финитной функции Н(х, у) в односвязной области Ω точность оценки будет лучше точности традиционных процедур интерполяции.
Определяют погрешность Θ(Н) восстановления рельефа в виде максимального значения абсолютной величины разности между истинной поверхностью и восстановленной:
 , где К - общее число первых моментов, обеспеченных точностью. Точности оценки моментов δ(Ik) будут определяться структурой расположения точек измерения.
, где К - общее число первых моментов, обеспеченных точностью. Точности оценки моментов δ(Ik) будут определяться структурой расположения точек измерения.
Для оптимального распределенных точек (измерений), которые всегда можно определить на исходном множестве точек (см. например, Соболь И.М. Многомерные квадратурные формулы и функции Хаара. М., Наука, 1969, с.288.) точность оценки момента для нормированной функции выбирается в соответствии с выражением δ(Ik)≤2/Nk.
Восстановление формы рельефа морского дна может выполняться после каждой серии дискретных измерений.
При исследовании подводных объектов, например морских участков магистральных трубопроводов, по зарегистрированным эхо-сигналам подводные объекты различают по их частотным характеристикам и оценивают их размер по интервалу частот между минимальными и максимальными значениями силы цели на частотных зависимостях (см., например: Клей К., Медвин Г. Акустическая океанография. Основы и применения. М.: Мир, 1980, - 580 с.). При этом величина силы цели анализируется в зависимости от произведения ka, где а - радиус цели, k=2π/λ - волновое число. Для акустически жестких объектов сферической формы величина силы цели в промежуточной области между релеевским и геометрическим рассеяниями, т.е. в области, где 1<ka<10, колеблется, асимптотически приближаясь к своему постоянному значению при ka>>1 (см., например: Урик Р.Дж. Основы гидроакустики. Л.: Судостроение. 1978. - 448 с.). Причина этих колебаний, как показали теоретические и экспериментальные исследования, заключается в переизлучении поверхностных и дифрагированных волн, которые вносят свой вклад в процесс формирования эхо-сигнала наряду с зеркальным отражением. Возникающая интерференция между указанными типами волн при достаточной длительности зондирующих импульсов приводит к осцилляциям в частотных зависимостях силы цели. Уровень этих осцилляций, количество, интервал между ними определяются физическими параметрами объекта, его геометрическими размерами, что позволяет использовать в качестве одного из простых и достаточно информативных признаков классификации и частотную зависимость силы цели. Оценка размеров объектов в совокупности с учетом абсолютной величины силы цели является вполне достаточной для того, чтобы различать объекты по их габаритам и на основании этого принимать решение о принадлежности к тому или иному классу.
При выполненных экспериментальных исследованиях задача рассеяния звука на акустически жесткой упругой сфере, находящейся за областью эффективного нелинейного взаимодействия волн, решалась в соответствии с известной методикой (см., например: У.К.Метсавээр, Я.А.Векслер, Н.Д.Кутсер. Эхо-сигналы от упругих объектов. Таллин: Академия наук ЭССР, 1974, 214 с.), которая позволяет исследовать с достаточной степенью точности звуковые поля отражающих объектов в однородной среде в случаях, когда можно пренебречь эффектом нелинейного взаимодействия отраженных от объекта волн накачки. Эти случаи включают в себя вариант рассеяния от тел, расположенных в дальней зоне параметрической антенны, либо рассеяния от сфер, расположенных в однородной среде, обладающей значительным поглощением для волн накачки, например в водонасыщенном однородном иле.
Анализ результатов экспериментальных исследований показал, что для объектов, выполненных из в виде сплошной стальной сферы, форма отраженного сигнала зависит от соотношения между диаметром сферы и длиной акустической волны. В случае использования сфер из акустически мягкого материала (пенопласта) или полой наполненной воздухом сферы с тонкой стенкой форма отраженных импульсов в местах минимумов на частотных зависимостях силы цели отличается от формы импульса, отраженного от сплошной сферы, что позволяет по форме огибающей эхо-сигнала отличать сферы, выполненные из акустически жестких и мягких материалов.
Количественная оценка продуктов биосферы выполняется по нескольким алгоритмам в зависимости от структуры и плотности скопления биопродукта.
Алгоритм количественной оценки в общем случае определяет переход от числа эхо-сигналов к абсолютной величине - числу биопродуктов, для чего определяется нормированная величина - средняя плотность скопления. Закономерности распределения плотности скопления биопродуктов по глубине определяются путем разделения диапазона на слои и вычисления плотности скопления для каждого слоя.
В частности, оценка количественных характеристик разреженных скоплений проводится на основе выражения для средней плотности разреженного скопления (см., например: Ермольчев В.А. Эхо-счетные и эхо-интегрирующие системы для количественной оценки рыбных скоплений. - М.: Пищевая промышленность, 1979. - c.193):
 ,
,
где K1 - число эхо-сигналов от биопродуктов из слоя 1;
S - сечение зоны действия эхолота, м;
Н - толщина скопления, м;
Q - частота повторения излучаемых сигналов;
Т - время прохождения судна над скоплением, час;
m - количество слоев.
При рассеянных скоплениях используется метод прямого эхо-счета.
По измеренным коэффициентам сопротивления и трения посредством блока пенетрометров 13 определяют прочностные характеристики грунта.
Пенетрометры представляют собой конусовидные снаряды, оснащенные датчиками, которые под действием силы тяжести или с помощью бура заглубляются в грунт и устанавливаются с судна в направлении от береговой линии вглубь моря. При этом измеряют коэффициенты сопротивления и трения, по которым определяют прочностные характеристики грунта на нескольких горизонтах по глубине грунта в диапазоне от 3 до 20 м по всей длине акватории от береговой линии. При последующем анализе устанавливают структуру грунта и выносят суждение о принадлежности той или иной структуры подводного грунта к структуре грунта континентального шельфа.
Картирование информации осуществляется нанесением геодезических координат точек отражения гидроакустических сигналов от морского дна на планшет, который строится путем сопряжения топографических и навигационных растровых карт в следующей последовательности:
- растр навигационной карты в проекции Меркатора подвергается векторизации береговой линии навигационной карты;
- выполняется выборка участка, соответствующего морской акватории, на которой производится съемка рельефа дна с учетом векторизации береговой линии навигационной карты;
- производится запись в итоговый растр навигационной карты;
- растр топографической карты в проекции Гаусса-Крюгера приводится к масштабу навигационной карты;
- выполняется преобразование координат проекции Гаусса-Крюгера в географические координаты;
- выполняется преобразование географических координат в координаты проекции Меркатора;
- производится выборка участка растра, соответствующего сухопутной (береговой) области;
- выполняется запись в итоговый растр топографической карты;
- по результатам записей в итоговые растры навигационной и топографической карты строится итоговая растровая карта совмещенной навигационной и топографической информации в Меркаторской проекции;
- на итоговой растровой карте, выводимой на устройство индикации, также отображается путь судна.
При картировании результатов характеристик грунтов континентального шельфа наносят геодезические координаты точек установки пенетрометров с отображением разрезов грунта. При этом расстояние между разрезами не превышает половины минимального диаметра неоднородностей, а при регистрации неоднородностей частота измерений на разрезах составляет более 1/8÷1/10 диаметра неоднородностей.
Обработка и визуализация зарегистрированных областей рельефа дна, грунта, подводных объектов, продуктов биосферы осуществляется посредством вычислителя 8, графопостроителя 6 и блока визуализации 18.
При визуализации зарегистрированной области рельефа дна, данные для VRML интерпретатора (фиг.2) формируются в оперативной памяти компьютера вычислительного устройства с последующей загрузкой в интерпретатор. Для чего в загрузочный VRML файл включен узел JavaScript, функции которого контролируют область видимого пространства. Программными инструментами для картографической визуализации служат структуры данных в формате SVG, который поддерживает векторные и растровые данные. Отображение в браузере данных в формате SVG осуществляется интерпретатором декларативного языка SVG. Данные в структуре SVG формируются аналогично формированию данных в формате VRML. На основе данных в структуре XML (геопространственная информация, включающая координаты местонахождения относительно береговой линии морских терминалов, их габаритные размеры и т.д.), получаемых от базы данных по запросу, проводится конвертация в памяти браузера в структуру SVG с помощью XSLT-T. Для одновременного представления геопространственных данных в двумерном и трехмерном представлении осуществляется поддержка синхронизации навигации по той и другой сцене. На картографической сцене отображается прямоугольник, соответствующий текущей области пространства, данные о которой загружены в память интерпретатора VRML. Синхронизация со стороны SVG осуществляется на основе функций JavaScript, встроенных в SVG и HTML. Так как синхронизацию со стороны VRML осуществить сложнее, то в загрузочный файл VRML включен узел JavaScript с навигационными функциями, не позволяющими трехмерному изображению выходить за рамки окна зрения и постоянно отслеживающими координаты окна зрения. Эти координаты служат необходимой информацией для синхронизации с картографической сценой, которая возможна с использованием таймера HTML.
Система навигации построена с использованием альтернативного по отношению к известной технологии GA принципа организации точки наблюдения трехмерной сцены, в которой используется стандартный принцип - точка наблюдения расположена вне сцены и при навигации сцена неподвижна, а изменяются координаты точки наблюдения и угол наблюдения. При этом центр вращения явно не определяется, что и является одной из причин потери изображения при навигации. В используемой технологии точка наблюдения находится постоянно в центре окна наблюдения и визуализируется небольшим трехгранником осей, а начало трехгранника всегда является центром вращения изображения и при навигации сцена перемещается относительно этого центра.
В модуле визуализации 18 также отображаются области рельефа дна и разрезов подводного грунта. При этом выполняют интерполяцию точек высот (глубин) методами двумерных сплайн-функций, а конкретно в виде двумерных нерегулярных рациональных фундаментальных сплайнов (NURBS) (см. например: Голованов Н.Н. Геометрическое моделирование. М., Физатлит, 2002, - 472 с.). Преимуществом такого метода является выполнение интерполяции точек высот в виде двумерных рациональных двумерных сплайн-функций NURBS, что позволяет построить гладкую поверхность для любой формы рельефа, даже для обрывов с отрицательным углом наклона. Во-вторых, поверхность рельефа задается аналитической зависимостью, т.е. конечным набором параметров фиксированного набора функций (полиномиальных сплайнов). Аналитическая форма задания рельефа, т.е. в виде суперпозиции аналитических функций от двух переменных, позволяет использовать весь аппарат дифференциальной геометрии для описания морфометрических свойств рельефа, например вычисления значения функции (высота, глубина) или ее дифференциала (уклон) в любой точке (точках) области задания функции. В-третьих, NURBS обеспечивают возможность локального редактирования формы поверхности. Кроме того, для одной и той же области земли объем массива данных ЦМР при использовании NUBRS будет как минимум на порядок меньше, чем при традиционном точечном представлении. Применение NURBS повышает эффективность визуализации зарегистрированной и фондовой информации за счет уменьшения времени обработки и требуемого объема памяти. Применение NURBS в вычислительной технике уже давно свершившийся факт: в графических пакетах всех операционных систем встроены алгоритмы обработки и визуализации NURBS, например в графических пакетах низкого уровня: DirectX и OpenGL для Windows. Однако при построении ЦМР возникают препятствия, связанные с эффектом возникновения в некоторых ситуациях нарушения монотонности в изменении поверхности - локальное появление ложных осцилляций. В конкретной технической реализации это препятствие устраняется либо путем добавления новых точек в массив для интерполяции, либо путем использования методов изогеометрической аппроксимации сплайнами (см., например: Квасов Б.И. Методы изогеометрической аппроксимации сплайнами. - М. - Ижевск: НИЦ «Регулярная и хаотическая динамика». Институт компьютерных исследований. 2006. - 416 с.).
В первом случае разрешение проблемы связано с повышением значимости работы эксперта в итерационной процедуре построения NURBS, во втором - с существенным усложнением математических алгоритмов технологии.
В предлагаемом способе реализована технология построения ЦМР на основе NURBS в виде итерационной экспертной автоматизированной процедуры. В качестве языка программирования использован язык MatLab. В этой системе качество построения ЦМР определяется путем экспертного сравнения положения изолиний, вычисленных по NURBS, с положением соответствующих изогипс (изобат) на исходной карте.
В конкретной реализации предлагаемого способа источником информации о рельефе служат растровые карты.
В общем случае при аппроксимации профиля рельефа одномерными сплайнами следует задавать значения двух первых производных в конечных точках разреза. Однако такая информация неизвестна, и получить ее на практике нельзя. Поэтому в качестве базового сплайна для аппроксимации профиля рельефа по разрезу использован простейший кубический сплайн с нулевыми граничными производными. Ввиду того что не существует никаких явно заданных двумерных сплайнов, так как нельзя построить бесконечную систему алгебраических уравнений для согласования двух первых производных по всем направлениям на смежных границах двух кусков сплайновой поверхности, то построение двумерной сплайн-функции производится с использованием тензорного произведения одномерных сплайнов (см., например: Завьялов Ю.С.. Квасов Б.И., Мирошниченко В.Л. Методы сплайн-функций. - Л. - М.: Наука, 1980. - 350 с.).
Согласование первых двух дифференциалов ЦРМ для смежных прямоугольных участков карты обеспечивается перекрытием областей задания смежных NURBS.
Таким образом, технология построения ЦМР в аналитическом виде на основе NURBS позволяет исключить этап триангуляции и тем самым исключить недостатки существующих технологий. Предлагаемая реализация технологии может быть адаптирована к другим типам исходной информации, и в нее могут быть включены более сложные типы базовых сплайнов.
Реализация заявляемого технического решения технической трудности не представляет, так как оно может быть реализовано на базе вычислительных средств и штатных судовых измерителей глубины, технических средств навигации и средств навигационного обеспечения.
Источники информации:
1. Авторское свидетельство SU №1103171.
2. Патент RU №2045081 C1.
3. Авторское свидетельство SU №1829019 A1.
4. Патент RU №2326408 C1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ГЕОХИМИЧЕСКОЙ РАЗВЕДКИ | 2012 |
|
RU2525644C2 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СИСТЕМА ДЛЯ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538440C2 |
| СПОСОБ ДИАГНОСТИКИ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445594C1 |
Изобретение относится к способам пространственной интерполяции восстановления рельефа морского дна при дискретных измерениях глубин посредством эхолокаторов и может быть использовано при выполнении метеорологических интерполяций, включая анализ ветровых полей, анализ радиологического и химического загрязнения, топографические интерполяции и другие, как при исследовании океана, так и при решении прикладных задач, обусловленных необходимостью картирования морского дна в обеспечение изыскательских и проектных работ на морских акваториях. Техническим результатом изобретения является расширение функциональных возможностей и повышение достоверности восстановления формы рельефа морского дна. Предложены способ и устройство для его осуществления. 2 н.п. ф-лы, 2 ил.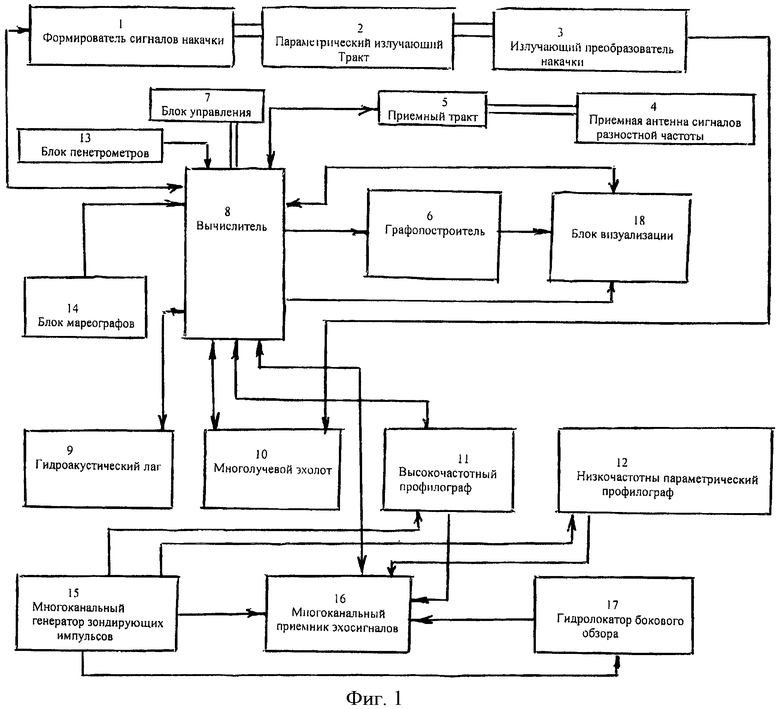
1. Способ восстановления рельефа морского дна при измерениях глубин посредством гидроакустических средств, установленных на подвижных морских объектах, включающий измерение глубины с определением поправки, обусловленной местом установки гидроакустического средства, определение вертикального распределения скорости звука в воде по отраженным сигналам, путем получения данных о триангуляции точек наблюдений с последующей их интерполяцией, восстановление формы рельефа дна, построение поверхности дна, при определении поправки дополнительно измеряют доплеровский сдвиг частоты опорного сигнала гидроакустического лага, определяют скорость подвижного морского объекта посредством приемоиндикатора радио и спутниковых навигационных систем, при этом определение вертикального распределения скорости звука в воде выполняют по временным рядам плотности звуковой энергии, отраженной от внутренних неоднородностей водной среды и дна, путем регистрации всех приходящих сигналов, рассеянных от внутренних неоднородностей морской среды, от момента посылки звукового импульса до момента прихода отраженного от дна сигнала с формированием временного ряда плотности звуковой энергии, отраженной от внутренних неоднородностей морской среды и дна в соответствии с зависимостью U(Z=0, t), где Z - глубина в моменты времени t, а скорость звука в воде C(Z) определяют путем решения обратной задачи рассеяния, дополнительно регистрируют низкочастотные волны посредством искусственно возбуждаемых высокочастотных волн накачки, восстановление формы рельефа выполняют по относительным изменениям высоты рельефа в соответствии с неравенством
|h(r2)-h(r1)|<A|r2-r1|λ, где h(r2)-h(r1) - разность высот в двух пространственных точках r1, r2; А (постоянная Гельдера), λ (показатель Гельдера) - положительные числа; 0<λ≤1, при этом выполняют оценку точности восстановления рельефа по величине относительного изменения высоты рельефа в зависимости от пространственного масштаба, при построении рельефа поверхности дна данные о триангуляции точек наблюдений интерпретируются в виде структуры неориентированного графа с определением длин (весов) ребер графа, отличающийся тем, что дополнительно в период формирования временных рядов плотности звуковой энергии определяют число эхосигналов от зарегистрированных неоднородностей, одновременно с профилированием дна гидролокатором выполняют профилирование дна высокочастотным профилографом, низкочастотным параметрическим профилографом и многолучевым эхолотом, определяют колебания уровня моря, определяют прочностные характеристики грунта по измеренным коэффициентам сопротивления и трения от береговой линии до границ континентального шельфа, формируют кадастровые карты с учетом восстановленного рельефа дна и карты разрезов грунта по прочностным характеристикам грунта, при визуализации зарегистрированной области рельефа дна выполняют вывод геопространственных данных в двумерном и трехмерном представлениях в виде структуры данных в формате SVG, построение профиля рельефа по разрезу выполняется путем интерполяции точек вертикального разреза грунта в виде рациональных двумерных сплайн-функций NURBS, аппроксимацию характерных точек разреза выполняют на основе кубического сплайна с нулевыми граничными производными, при картировании результатов характеристик грунтов континентального шельфа наносят геодезические координаты точек установки пенетрометров с отображением разрезов грунта, при этом расстояние между разрезами не превышает половины минимального диаметра неоднородностей, а при регистрации неоднородностей частота измерений на разрезах составляет более 1/8÷1/10 диаметра неоднородностей.
2. Устройство для осуществления способа, представляющее собой гидролокатор для определения глубин акватории, содержащее функционально соединенные первую и вторую антенны, одна из которых излучающая, а вторая приемная, формирующие приемоизлучающие каналы, вычислитель, блок управления, в котором блок управления соединен с приемоизлучающими каналами, вычислителем, в которое дополнительно введены формирователь сигналов накачки, графопостроитель, параметрический излучающий тракт, который своим выходом соединен с излучающей антенной, а входом соединен с выходом формирователя накачки, который своим выходом соединен с выходом блока управления, графопостроитель своими входами соединен с выходами вычислителя и блока управления, отличающееся тем, что дополнительно введены второй гидролокатор бокового обзора, многоканальный генератор зондирующих импульсов, многоканальный приемник эхосигналов, блок функционального управления, многолучевой эхолот, высокочастотный профилограф, низкочастотный параметрический профилограф, блок пенетрометров, блок мареографов, блок визуализации, при этом низкочастотный параметрический профилограф своими входами соединен с выходом формирователя сигналов накачки и выходом многоканального генератора зондирующих импульсов, который другими выходами соединен со входами второго гидролокатора бокового обзора, высокочастотного профилографа и многолучевого эхолота соответственно, многоканальный приемник эхосигналов своими выходами соединен с входами блока функционального управления, который своим выходом соединен со входом вычислителя и входом-выходом с входом-выходом блока управления, блок мареографов и блок пенетрометров по гидроакустическому каналу связи соединены с блоком функционального управления, блок визуализации своими входами соединен с выходами блока функционального управления, блока управления, вычислителя и графопостроителя соответственно.
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2272303C1 |
| Способ очистки технической бензойной кислоты | 1940 |
|
SU60204A1 |
| JP 7140243 A, 02.06.1995 | |||
| DE 3619253 A1, 10.12.1987. | |||

