Изобретение относится к области автоматизированного управления системами вооружения и предназначено для использования в составе боевой машины реактивной системы залпового огня (БМ РСЗО).
Существующие неавтоматизированные средства наведения и подготовки огня, например в БМ 9A52-2 РСЗО "Смерч" [1], содержат оптическое прицельное приспособление, приводы наведения, блок приема-передачи данных. Для подготовки залпа выбирается стартовая позиция (СП), с помощью машины-топопривязчика осуществляется ее топогеодезическая подготовка, в том числе определение координат и закрепление на местности ориентирного направления с известным дирекционным углом. Данные СП в цифровом виде через блок приема-передачи данных по радио или проводному каналу связи передаются в машину управления, где для заданных координат цели (точки прицеливания) производится расчет установок стрельбы (углов наведения) и данных полетного задания. Расчетные данные передаются на БМ в цифровом виде, где принимаются через блок приема-передачи данных. Наводчик БМ вводит углы наведения в оптическое прицельное приспособление и с помощью приводов наведения наводит пакет направляющих БМ, используя прицельное приспособление и ранее созданное ориентирное направление.
Недостатками существующих средств наведения и управления огнем являются:
- неавтономность функционирования БМ (расчет установок стрельбы в машине управления, предварительная топогеодезическая подготовка СП машиной-топопривязчиком);
- снижение живучести БМ из-за ее длительного нахождения на СП (приведение в боевое положение прицельного приспособления, наведение по прицельному приспособлению, контроль правильности наведения командиром БМ);
- большое время подготовки к открытию огня (большое количество ручных операций).
Изобретение направлено на обеспечение тактической автономности, повышение живучести БМ и сокращение времени открытия огня за счет автономной топогеодезической привязки СП и автономного ориентирования БМ, автономного расчета установок и данных полетного задания по принятым от машины управления координатам точек прицеливания и автономно определенным координатам СП, бесприцельного наведения пакета направляющих БМ по рассчитанным установкам без выхода экипажа из кабины БМ.
Сущность изобретения заключается в том, что в систему управления наведением и огнем (АСУНО) боевой машины реактивной системы залпового огня, содержащую блок приема-передачи данных и приводы наведения, введены система бесприцельного наведения пакета направляющих, система автономного ориентирования, система навигации, система расчета установок стрельбы и данных полетного задания, навигационная аппаратура потребителей спутниковых навигационных систем, система графического отображения местоположения и ориентации БМ.
Первый и второй входы системы бесприцельного наведения пакета направляющих соединены соответственно с первым выходом системы навигации и выходом системы расчета установок стрельбы и данных полетного задания, а выход системы бесприцельного наведения пакета направляющих соединен со входом приводов наведения.
Первый и второй входы системы навигации соединены соответственно с выходом системы автономного ориентирования и выходом навигационной аппаратуры потребителей спутниковых навигационных систем.
Первый и второй входы системы расчета установок стрельбы и данных полетного задания соединены соответственно со вторым выходом системы навигации и выходом блока приема-передачи данных,
Первый, второй и третий входы системы графического отображения местоположения и ориентации БМ соединены соответственно со вторым и первым выходами системы навигации и выходом блока приема-передачи данных.
Сущность другого варианта изобретения заключается в том, что в систему управления наведением и огнем боевой машины (БМ) реактивной системы залпового огня, содержащую блок приема-передачи данных, введены система бесприцельного наведения пакета направляющих, система автономного ориентирования, система навигации, система расчета установок стрельбы и данных полетного задания, навигационная аппаратура потребителей спутниковых навигационных систем, система графического отображения местоположения и ориентации БМ, система графического отображения рассогласований углов наведения.
Первый и второй входы системы бесприцельного наведения пакета направляющих соединены соответственно с первым выходом системы навигации и выходом системы расчета установок стрельбы и данных полетного задания, а выход системы бесприцельного наведения пакета направляющих соединен со входом системы графического отображения рассогласований углов наведения.
Первый и второй входы системы навигации соединены соответственно с выходом системы автономного ориентирования и выходом навигационной аппаратуры потребителей спутниковых навигационных систем.
Первый и второй входы системы расчета установок стрельбы и данных полетного задания соединены соответственно со вторым выходом системы навигации и выходом блока приема-передачи данных.
Первый, второй и третий входы системы графического отображения местоположения и ориентации БМ соединены соответственно со вторым и первым выходами системы навигации и выходом блока приема-передачи данных.
На фигуре 1 показана автоматизированная система управления наведением и огнем боевой машины реактивной системы залпового огня с автоматическим наведением пакета направляющих.
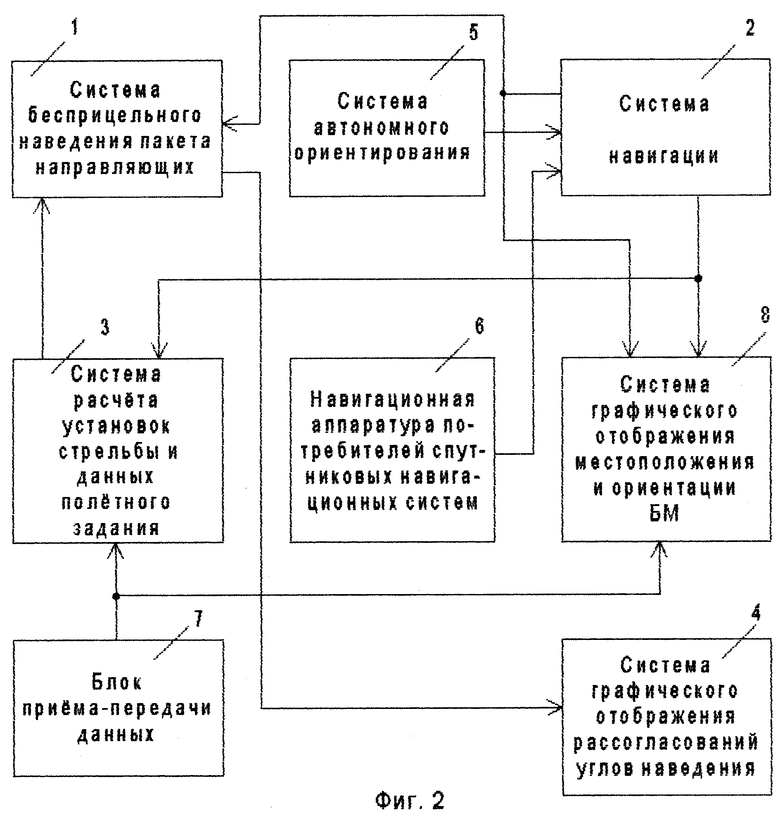
На фигуре 2 показана автоматизированная система управления наведением и огнем боевой машины реактивной системы залпового огня с полуавтоматическим наведением пакета направляющих.
Сведения, подтверждающие возможность осуществления предлагаемого технического решения с получением вышеуказанного технического результата, заключаются в следующем.
Автоматизированная система управления наведением и огнем боевой машины реактивной системой залпового огня (фиг. 1) содержит систему бесприцельного наведения пакета направляющих (1), первый вход (дирекционного угла) и второй вход (расчетных углов наведения), которой соединены соответственно с первым выходом (выходом дирекционного угла) системы навигации, например одометрической (2), и выходом системы расчета установок стрельбы и данных полетного задания (3), а выход системы бесприцельного наведения пакета направляющих соединен со входом приводов наведения (4), первый вход (начального азимута) и второй вход (начальных координат) системы навигации соединены соответственно с выходом системы автономного ориентирования (5) и выходом навигационной аппаратуры потребителей спутниковых навигационных систем (6), первый вход (координат стартовой позиции) и второй вход (координат точки прицеливания) системы расчета установок стрельбы и данных полетного задания (3) соединены соответственно со вторым выходом (выходом координат БМ) системы навигации (2) и выходом блока приема-передачи данных (7), первый вход (координат БМ), второй вход (ориентации БМ) и третий вход (координат цели) системы графического отображения местоположения и ориентации БМ, например с цифровой картой местности (8), соединены соответственно со вторым выходом (координат БМ), первым выходом (дирекционного угла) системы навигации (2) и выходом блока приема-передачи данных (7).
Автоматизированная система управления наведением и огнем боевой машины реактивной системой залпового огня (фиг. 2) содержит систему бесприцельного наведения пакета направляющих (1), первый вход (дирекционного угла) и второй вход (расчетных углов наведения), которой соединены соответственно с первым выходом (выходом дирекционного угла) системы навигации, например одометрической (2), и выходом системы расчета установок стрельбы и данных полетного задания (3), а выход системы бесприцельного наведения пакета направляющих соединен со входом системы графического отображения рассогласований углов наведения (4), первый вход (начального азимута) и второй вход (начальных координат) системы навигации соединены соответственно с выходом системы автономного ориентирования (5) и выходом навигационной аппаратуры потребителей спутниковых навигационных систем (6), первый вход (координат стартовой позиции) и второй вход (координат точки прицеливания) системы расчета установок стрельбы и данных полетного задания (3) соединены соответственно со вторым выходом (выходом координат БМ) системы навигации (2) и выходом блока приема-передачи данных (7), первый вход (координат БМ), второй вход (ориентации БМ) и третий вход (координат цели) системы графического отображения местоположения и ориентации БМ, например с цифровой картой местности (8), соединены соответственно со вторым выходом (координат БМ), первым выходом (дирекционного угла) системы навигации (2) и выходом блока приема-передачи данных (7).
Автоматизированная система управления наведением и огнем боевой машины реактивной системы залпового огня с автоматическим наведением пакета направляющих функционирует следующим образом (фиг. 1).
Система автономного ориентирования (5) определяет начальный азимут и передает его в систему навигации (2). Навигационная аппаратура потребителей спутниковых навигационных систем (6) определяет начальные координаты БМ и передает их в систему навигации (2). Последняя на стоянке и в процессе движения БМ к стартовой позиции непрерывно определяет текущие координаты и дирекционный угол БМ и передает их в систему графического отображения местоположения и ориентации БМ (8). Одновременно координаты БМ из системы навигации (2) поступают в систему расчета установок стрельбы и данных полетного задания (3), а дирекционный угол БМ поступает в систему бесприцельного наведения пакета направляющих (1).
Заданные координаты точки прицеливания из блока приема-передачи данных (7) поступают в систему графического отображения местоположения и ориентации БМ (8) и в систему расчета установок стрельбы и данных полетного задания (3). Система графического отображения местоположения и ориентации БМ (8) отображает текущее местоположение БМ, например на топографической карте, направление движения БМ, местоположение цели, дальность до нее и направление на нее с текущей позиции БМ, что обеспечивает человеку-оператору выбор стартовой позиции и указывает направление заезда на нее. На стартовой позиции система расчета установок стрельбы и данных полетного задания (3) по координатам точки прицеливания и текущим координатах БМ, равным, в этом случае, координатах стартовой позиции, рассчитывает углы наведения пакета направляющих и передает их в систему бесприцельного наведения пакета направляющих (1). Последняя непрерывно определяет текущие углы ориентации пакета, рассчитывает их рассогласования с расчетными углами наведения и передает в приводы наведения (4).
Приводы наведения (4) перемещают пакет направляющих, уменьшая указанные рассогласования. В результате пакет направляющих наводится на расчетные углы для выполнения залпа по цели. После выполнения залпа БМ либо меняет стартовую позицию, совершая противоогневой маневр, либо следует на техническую позицию для заряжания и далее на стартовую позицию. В обоих случаях цикл функционирования повторяется.
Автоматизированная система управления наведением и огнем боевой машины реактивной системы залпового огня с полуавтоматическим наведением пакета направляющих (фиг. 2) функционирует следующим образом.
Система автономного ориентирования (5) определяет начальный азимут и передает его в систему навигации (2). Навигационная аппаратура потребителей спутниковых навигационных систем (6) определяет начальные координаты БМ и передает их в систему навигации (2). Последняя на стоянке и в процессе движения БМ к стартовой позиции непрерывно определяет текущие координаты и дирекционный угол БМ и передает их в систему графического отображения местоположения и ориентации БМ (8). Одновременно координаты БМ из системы навигации (2) поступают в систему расчета установок стрельбы и данных полетного задания (3), а дирекционный угол БМ поступает в систему бесприцельного наведения пакета направляющих (1).
Заданные координаты точки прицеливания из блока приема-передачи данных (7) поступают в систему графического отображения местоположения и ориентации БМ (8) ив систему расчета установок стрельбы и данных полетного задания (3). Система графического отображения местоположения и ориентации БМ (8) отображает текущее местоположение БМ, например на топографической карте, направление движения БМ, местоположение цели, дальность до нее и направление на нее с текущей позиции БМ, что обеспечивает человеку-оператору выбор стартовой позиции и указывает направление заезда на нее. На стартовой позиции система расчета установок стрельбы и данных полетного задания (3) по координатам точки прицеливания и текущим координатам БМ, равным, в этом случае, координатам стартовой позиции, рассчитывает углы наведения пакета направляющих и передает их в систему бесприцельного наведения пакета направляющих (1). Последняя непрерывно определяет текущие углы ориентации пакета, рассчитывает их рассогласования с расчетными углами наведения и передает в систему графического отображения рассогласований углов наведения (4).
Человек-оператор, ориентируясь по системе графического отображения рассогласований углов наведения (4), наводит пакет направляющих на расчетные углы для выполнения залпа по цели. После выполнения залпа БМ либо меняет стартовую позицию, совершая противоогневой маневр, либо следует на техническую позицию для заряжания и далее на стартовую позицию. В обоих случаях цикл функционирования повторяется.
В результате функционирования автоматизированной системы управления наведением и огнем боевой машины реактивной системы залпового огня:
- подготовка к открытию огня, включающая расчет установок стрельбы и данных полетного задания, топогеодезическую подготовку стартовой позиции, осуществляется автономно (без использования средств машины управления и топопривязчика);
- из времени подготовки к открытию огня исключается время предварительной топогеодезической подготовки стартовой позиции и время расчета на машине управления и передачи на БМ установок стрельбы и данных полетного задания, сокращается время наведения пакета направляющих БМ за счет исключения ручных операций работы с оптическим прицельным приспособлением и выхода членов экипажа из кабины БМ для работы с ним;
- исключаются возможные субъективные ошибки оператора: при считывании установок стрельбы с индикаторов блока приема-передачи данных, при вводе значений заданных углов наведения в прицельное приспособление, при наведении пакета по оптическому прицельному приспособлению;
- появляется возможность наведения пакета направляющих в условиях недостаточной видимости (сильный дождь, снег, туман).
В итоге реализуется сквозная автоматизация управления наведением и огнем БМ РСЗО, обеспечивается тактическая автономность БМ, минимальное время нахождения БМ на стартовой позиции, ведение огня с произвольной стартовой позиции с возможностью ее смены между залпами,
В составе АСУНО БМ РСЗО могут использоваться системы автономного ориентирования и одометрической навигации, применяемые в топопривязчикак.
Система бесприцельного наведения пакета направляющих БМ содержит гироприбор - хранитель направления, устанавливаемый непосредственно на пакете направляющих БМ, и вычислительное устройство.
Система автономного ориентирования содержит гироприбор, типа гирокомпас, и вычислительное устройство.
Система одометрической навигации также содержит гироприбор - хранитель направления (гирокурсокреноуказатель), устанавливаемый на шасси БМ.
Автоматизированная система управления наведением и огнем может быть реализована с единым двухрежимным прибором, совмещающим функции гирокомпаса и гироскопического хранителя направления (гирокурсоуказателя), размещенным на пакете направляющих.
При походном положении пакета направляющих он жестко фиксируется относительно шасси БМ, что эквивалентно размещению гироприбора на шасси БМ при выполнении функции одометрической навигации БМ.
Образец автоматизированной системы управления наведением и огнем БМ, реализующий вариант с полуавтоматическим наведением пакета направляющих, содержит единый двухрежимный гироприбор АЮИЖ.462515.013, размещенный на пакете направляющих, механический датчик скорости АЮИЖ.402221.002, навигационную аппаратуру потребителей спутниковых навигационных систем СН-3001 ПКАН. 461513.009 и ЭВМ с цветным графическим дисплеем "Багет-41" ЮКСУ.466225.010, совмещающую функции вычислительных устройств системы бесприцельного наведения пакета направляющих, системы начального ориентирования и системы одометрической навигации. На этой же ЭВМ реализованы система расчета установок стрельбы и данных полетного задания, система графического отображения местоположения и ориентации БМ с цифровой картой местности и система графического отображения рассогласований углов наведения.
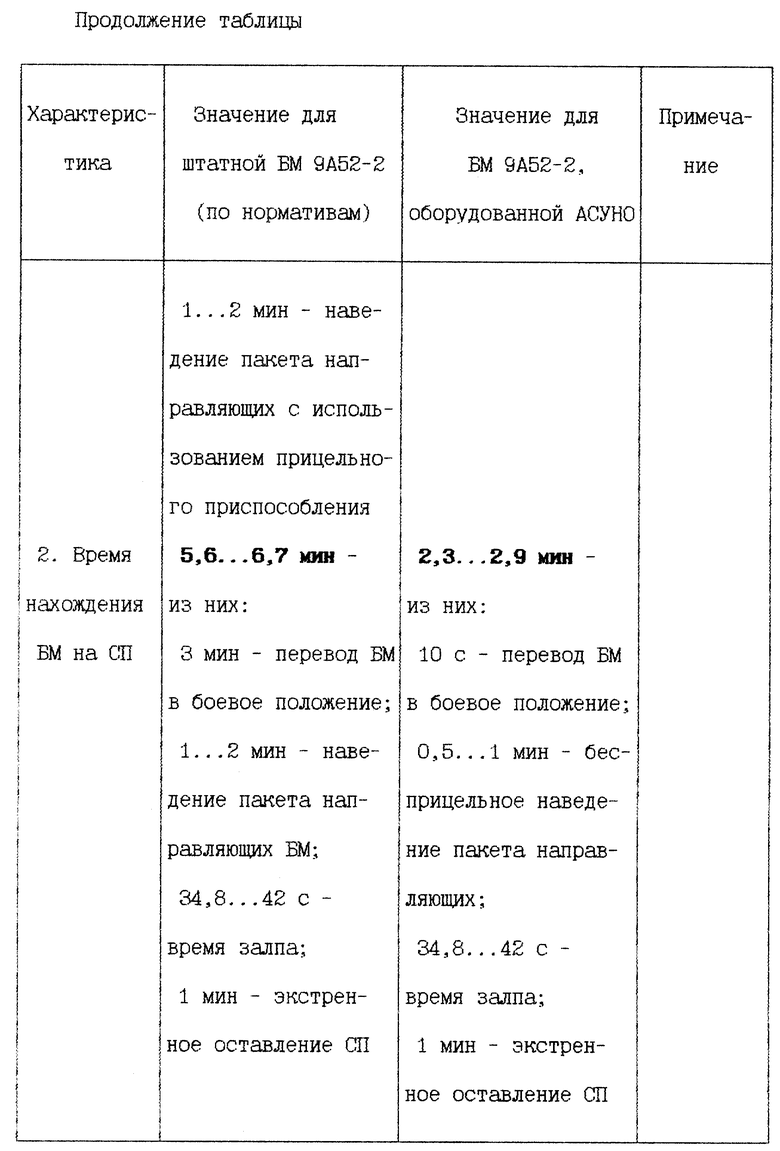
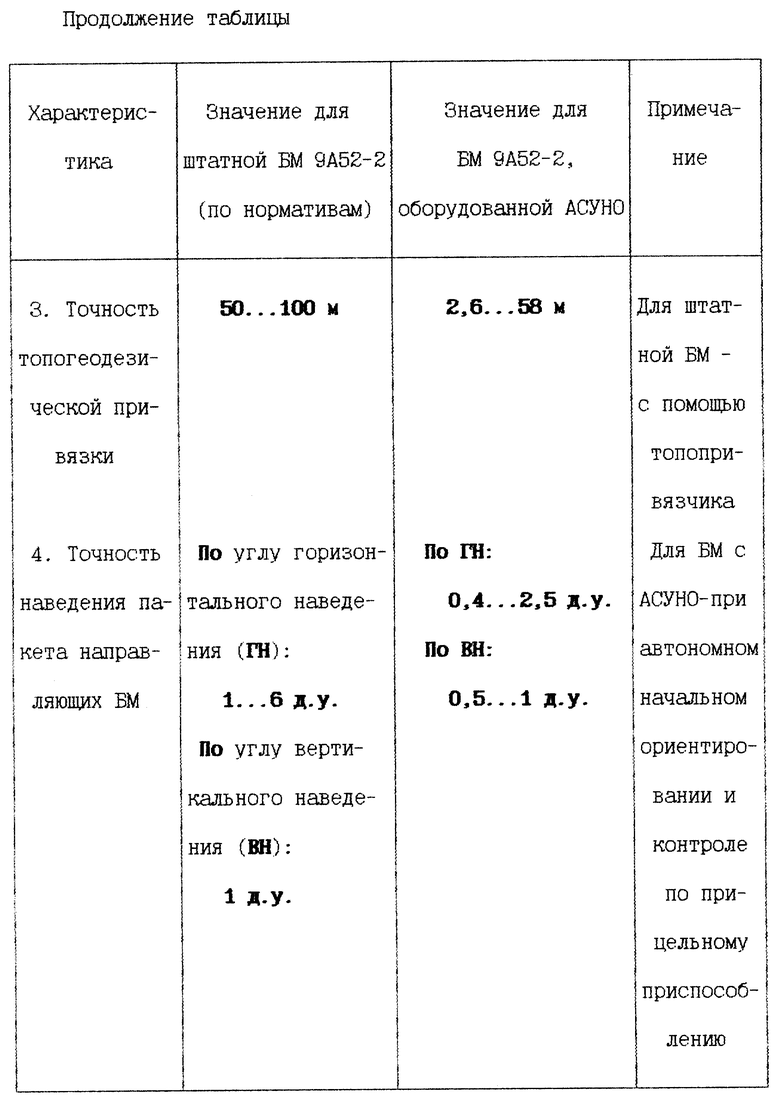
Образец АСУНО был испытан в составе БМ 9А52-2 в условиях полигона. Испытания подтвердили возможность осуществления предлагаемого технического решения с получением вышеуказанного технического результата. Полученные в результате испытаний числовые характеристики в сопоставлении с характеристиками штатной БМ (по нормативам) приведены в таблице.
Библиографические данные
1. Техническое описание боевой машины 9А52-2.
2. Нормативы выполнения задач для подразделений РСЗО 9К52. - МО РФ, 1993 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБСТРЕЛА БОЕВОЙ МАШИНОЙ ГРУППОВОЙ ЦЕЛИ С ЗАКРЫТЫХ ОГНЕВЫХ ПОЗИЦИЙ НЕУПРАВЛЯЕМЫМИ СНАРЯДАМИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2315940C2 |
| СПОСОБ ОБСТРЕЛА ПЛОЩАДНОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2239767C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРУППОВОЙ ЦЕЛИ ДЛЯ ЕЕ ОБСТРЕЛА | 2008 |
|
RU2399853C2 |
| СПОСОБ ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2247921C2 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 2003 |
|
RU2245504C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2603821C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2217684C2 |
| СПОСОБ ПОДДЕРЖАНИЯ ДВИЖЕНИЯ БАТАЛЬОНА СУХОПУТНЫХ ВОЙСК РЕАКТИВНОЙ СИСТЕМОЙ ЗАЛПОВОГО ОГНЯ И РЕАКТИВНАЯ УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2249170C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |

Изобретение относится к области военной техники. Технический результат - обеспечение тактической автономности боевой машины (БМ), повышение живучести БМ и сокращение времени подготовки залпа с произвольной стартовой позиции (СП) путем автономной топогеодезической привязки и ориентирования БМ, автономного расчета установок стрельбы и данных полетного задания (РУ и ДПЗ) по координатам точек прицеливания, бесприцельного наведения пакета направляющих. Система автономного ориентирования согласно изобретению определяет начальный азимут, а навигационная аппаратура - начальные координаты БМ. После чего система навигации непрерывно определяет местоположение и ориентацию БМ, отображаемые системой, например, на фоне топографической карты. После получения целеуказания через блок приема-передачи данных, система также отображает дальность до цели и направление заезда на стартовую позицию (СП). На СП система определяет заданные углы наведения для текущих координат БМ. Система непрерывно определяет рассогласования их с текущими углами наведения. Привода наведения по этим рассогласованиям осуществляют наведение пакета направляющих. После залпа БМ может совершить противоогневой маневр и сменить СП. Подготовка нового залпа осуществляется аналогичным образом. 2 с. и 2 з. п.ф-лы, 2 ил., 1 табл.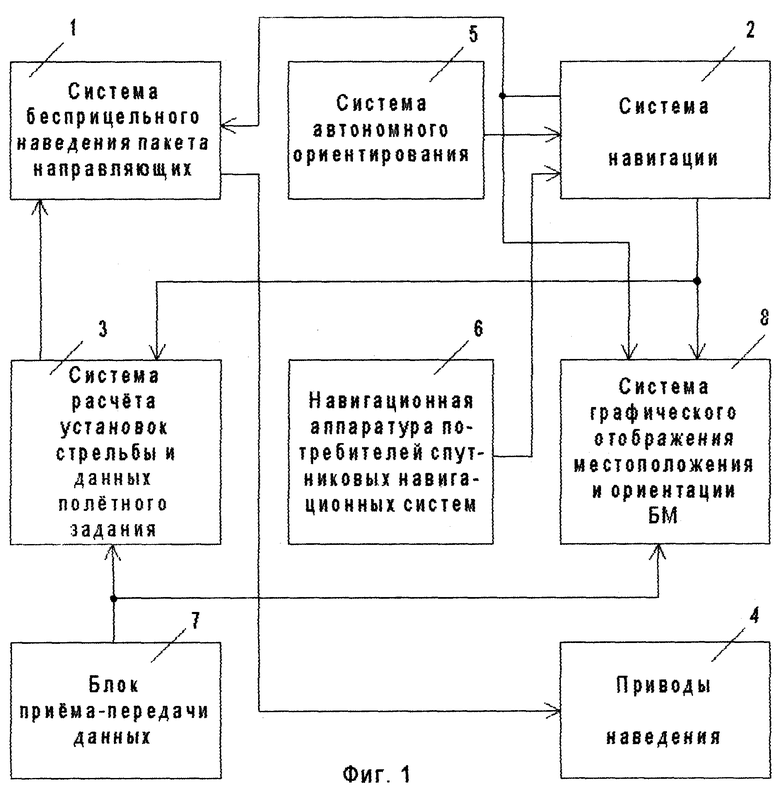
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| ТО, ОАО "Мотовилихинские заводы", 1983, с.10-13 | |||
| КОМПЛЕКС ВООРУЖЕНИЯ ТАНКА | 1995 |
|
RU2087830C1 |
| US 3446112, 27.05.1969 | |||
| ПАРОГЕНЕРАТОР И СТИРАЛЬНАЯ МАШИНА С НИМ | 2007 |
|
RU2401397C2 |

