Изобретение относится к приборостроению, в частности, дистанционному управлению действиями наблюдателя-оператора на местности.
Известна (см., напр., патент РФ №2123165) оптико-лазерная система для прицеливания и дальнометрирования воздушных целей. Система состоит из лазерного излучателя с блоком накачки и приемника излучения, входящих в состав оптической следящей системы и дальномерного канала, а также блока вычислений. При этом прицельная следящая система содержит зеркало, установленное с возможностью поворота, положение которого определяется по сигналу, вырабатываемому блоком вычислений. Для уменьшения расходимости луча используется телескопический объектив. Недостатком системы является ее сравнительно узкое применение - в основном для ракет класса “воздух-воздух” и, тем самым, невозможность использования с позиций на местности для поиска и локализации объектов как наземных, так и воздушных в определенной системе координат. Кроме того, весь комплекс является довольно сложным и дорогостоящим.
Известна также оптико-электронная система поиска и сопровождения цели (патент РФ №2155323), которая содержит подвижное зеркало с датчиком углов и приводами, спектроделительный фильтр, пеленгационный канал, формирующий сигнал рассогласования между оптической осью системы инаправлением на цель, а также передающий и приемный лазерные каналы. В режиме поиска просмотр пространства целей осуществляется подвижным зеркалом по сигналам рассогласования между информациями пеленгационного канала и внешней системой целеуказания. Сигнал рассогласования между оптической осью системы и направлением на цель по двум координатам - азимуту и высоте подается на приводы подвижного зеркала, приводя изображение цели в центр поля зрения чувствительных площадок. Далее производится переход в режим слежения и дальнометрирования. Недостатком системы является возможность ее использования только для оружия с лазерным наведением, и она, тем самым, не может применяться для наблюдения за объектами на местности с определением дальности, азимута и угла места удаленного объекта, а также для дистанционной дополнительной ориентации наблюдателя относительно целей.
Наиболее близкой к изобретению является автоматизированная система управления наведения и огнем боевой машины реактивной системы залпового огня (патент РФ №2167380). Для ее работы используется автономная топогеодезическая привязка и ориентирование боевой машины, автономный расчет установок стрельбы и данных полетного задания по координатам точек прицеливания, бесприцельное наведение пакета направляющих. Система автономного ориентирования определяет начальный азимут, а навигационная аппаратура - начальные координаты боевой машины. После чего система навигации непрерывно определяет местоположение и ориентацию боевой машины, отображаемые системой на фоне топографической карты. После получения целеуказания через блок приема-передачи данных система также отображает дальность до цели и направление заезда на стартовую позицию. На стартовой позиции система определяет заданные углы наведения для текущих координат боевой машины. Система непрерывно определяет рассогласования их с текущими углами наведения. Приводы наведения по этим рассогласованиям осуществляют наведение пакета направляющих. Недостатками системы являются ее сложность, высокая стоимость и ограниченность применения.
Задачей для предлагаемого изобретения является создание дешевого и надежного прибора для передачи указания оператору на местности направления, требующего контроля и типа этого контроля.
Техническим результатом изобретения является построение простой и надежной в применении системы передачи оператору информации о направлении.
Технический результат достигается тем, что в способе ориентирования на местности, заключающемся в измерении координат объекта, координат наблюдателя и передачи их для дальнейшего использования, а также в дополнительной ориентации наблюдателя с учетом получения целеуказания и определении рассогласования заданных и текущих координат, наблюдатель производит сканирование местности с фиксацией показаний датчиков азимута и угла места, а также фиксацией показаний устройства определения собственных координат наблюдателя при обнаружении им объекта наблюдения, данные от которых направляют в устройство управления наблюдателя, причем собственные координаты каждого наблюдателя через индивидуальные приемопередатчики поступают в устройство управления и вычислений группового оборудования, имеющего блок памяти, содержащий цифровую модель рельефа местности наблюдения и базу данных для целераспределения и их обновления, вместе с тем на цифровую модель рельефа местности наносят полученные данные о местах расположения наблюдателей, а также целей из базы данных для целераспределения, после чего производят передачу данных об относительном расположении наблюдателя и распределенной ему цели через приемопередатчики в устройство управления наблюдателя, в котором производят их сравнение с данными, полученными от датчиков азимута и угла места, а результирующий разностный сигнал передают на индикаторы-указатели вертикального и горизонтального поворота устройства сканирования наблюдателя.
Технический результат достигается также тем, что устройство ориентирования на местности содержит датчики местоположения и ориентации, устройство управления и вычислений, приемопередатчики, при этом в устройстве сканирования для наблюдателя установлены индикаторы-указатели вертикального и горизонтального поворота, а также датчики положения в пространстве по азимуту и углу места, наблюдатель снабжен, кроме того, устройством определения собственных координат, имеющим навигационную аппаратуру, связанную со спутником, датчики положения в пространстве и устройство определения собственных координат наблюдателя подключены к входу индивидуального устройства управления наблюдателя, которое соединено с индикаторами-указателями вертикального и горизонтального поворота устройства сканирования наблюдателя, а также входом и выходом соединено с индивидуальным приемопередатчиком наблюдателя, приемопередатчик наблюдателя также связан с групповым приемопередаточньм устройством, соединенным с устройством управления и вычислений группового оборудования, включающего в себя блок памяти, содержащий цифровую модель рельефа местности и базу данных для целераспределения.
Кроме того, в качестве устройства сканирования наблюдателя использованы защитные очки, или бинокль, или дальномер, или прицел.
Таким образом, прибор имеет монитор, встроенный, например, в защитные очки и не мешающий выполнению функций наблюдателя, в то же время находящийся в поле зрения наблюдателя, с индикаторами, выполняющими функции указателя направления горизонтального и вертикального поворота и функции визирного устройства для сканирования местности и фиксирования направления на объект, встроенные датчики определения и съема азимута и угла места, которые вместе с устройством определения координат наблюдателя подключены к индивидуальному устройству управления. Последнее связано с устройством управления и вычислений, который содержит встроенную цифровую модель рельефа местности, блок данных для целераспределения и блок обновления оперативной обстановки.
Тем самым появляется возможность определения собственных координат наблюдателя и передачи ему направления на объект или зону ответственности в соответствии с командами от устройства управления и вычислений с применением цифровой модели рельефа и на основании данных для целераспределения и оперативной обстановки. При этом используемое средство является простым, надежным, дешевым и вместе с тем обеспечивает требуемую точность, достаточную для того, чтобы объект-цель попала в поле зрения наблюдателя, и быстроту получения оперативной информации.
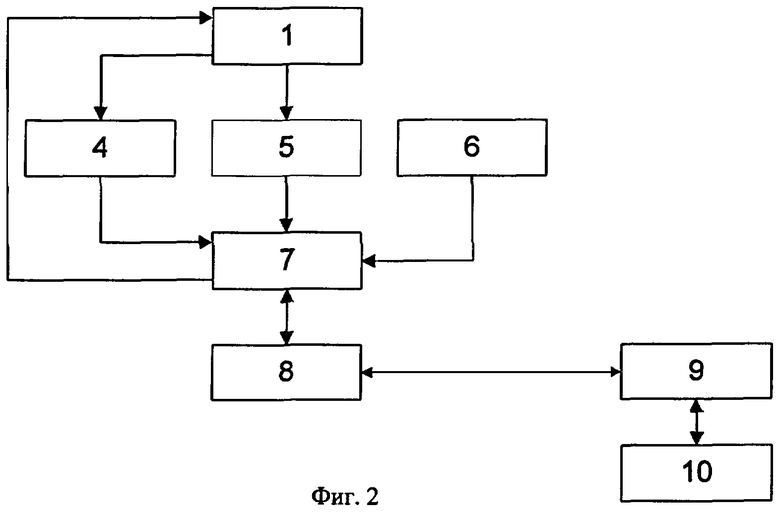
На фиг.1 показано устройство сканирования наблюдателя с индикаторами в нем.
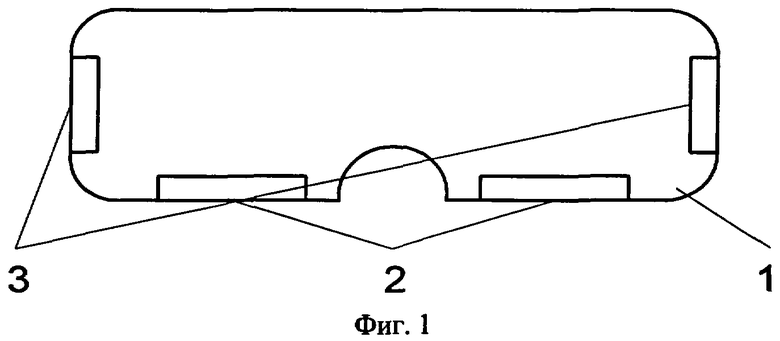
На фиг.2 дана блок-схема устройства ориентирования на местности.
Система содержит индивидуальное оборудование, включающее защитные очки 1 и индикаторы-указатели вертикального 2 и горизонтального 3 поворота и датчики положения в пространстве по азимуту 5 и углу места 4, соединенные с индивидуальным устройством управления 7 и каналом связи в виде приемопередатчика 8, причем система также включает в себя устройство определения собственных координат 6, которое имеет навигационную аппаратуру, связанную со спутником, и групповое оборудование, состоящее из канала связи в виде приемопередатчика 9, устройства управления и вычислений 10 с цифровой моделью рельефа в блоке памяти и базой данных для целераспределения и их обновления.
Заявленная система ориентирования с указанием наблюдателю на местности оперативного направления работает следующим образом.
В устройстве управления и вычислений 10 группового оборудования разворачивают цифровую модель рельефа местности, на которую наносят данные о местах расположения наблюдателей, получаемые от индивидуального устройства управления 7, соединенного с устройством определения собственных координат 6, через приемопередатчики 8 и 9, и целей из базы данных для целераспределения устройства управления и вычислений группового оборудования 10. Работа группового оборудования по получению информации о целях и целераспределению выходит за рамки настоящей заявки и приводится лишь в качестве иллюстрации. После того как цели распределены, производят передачу данных об относительном расположении наблюдателя и распределенной ему цели оператором от группового оборудования через каналы связи, обеспеченные приемопередатчиками 8 и 9 соответственно.
После того как данные получены устройством управления 7 индивидуального оборудования, они сравниваются с данными, полученными от датчиков азимута 5 и угла места 4. В состав датчиков 4 и 5 входят две компоненты: микромеханическая компонента позволяет зафиксировать и непродолжительное время сохранять с необходимой точностью направление на выбранный на местности или созданный искусственно репер (ориентир) и составляющая, способная измерить относительный угол между целью и репером (ориентиром). Разностный сигнал в удобном для наблюдателя виде передается на индикаторы-указатели вертикального 2 и горизонтального 3 поворота, например, защитных очков 1. Наблюдатель поворачивает устройство сканирования в виде защитных очков в указанном ему направлении так, что распределенная цель или зона ответственности попадает в его поле зрения.
Тем самым у наблюдателя появляется возможность провести подготовительные действия на угрожаемом направлении до того, как угроза станет заметной с его позиции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛИРУЕМОГО ОРИЕНТИРОВАНИЯ НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310881C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 2002 |
|
RU2247941C2 |
| СПОСОБ ОБСТРЕЛА ПЛОЩАДНОЙ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2239767C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2274876C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2008 |
|
RU2381447C1 |
| СПОСОБ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2481557C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА И СПОСОБ ОПРЕДЕЛЕНИЯ СФЕРИЧЕСКИХ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ | 2011 |
|
RU2486467C1 |
| СПОСОБ ПОЛУЧЕНИЯ И АКТУАЛИЗАЦИИ ЦИФРОВОГО КАРТОГРАФИЧЕСКОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244260C1 |
| Универсальная роботизированная платформа | 2016 |
|
RU2639009C1 |
Изобретения относятся к области приборостроения, а именно к приборам, использующим дистанционное управление действиями наблюдателя-оператора на местности. Способ ориентирования на местности заключается в измерении координат объекта, координат наблюдателя и передачи их для дальнейшего использования, а также ориентации наблюдателя с учетом получения целеуказания и определении рассогласования заданных и текущих координат. Наблюдатель производит сканирование местности с фиксацией показаний датчиков азимута и угла места, показаний устройства для определения собственных координат наблюдателя при обнаружении им объекта наблюдения. Эти данные поступают в индивидуальное устройство управления наблюдателя. Собственные координаты каждого наблюдателя через индивидуальные приемопередатчики передают в устройство управления и вычислений группового оборудования, имеющего блок памяти, в котором содержится цифровая модель рельефа местности наблюдения и база данных для целераспределения и их обновления. На цифровую модель рельефа наносят полученные данные о местах расположения наблюдателей, а также целей с базы данных для целераспределения. Производят передачу данных об относительном расположении наблюдателя и распределенной ему цели через приемопередатчики в устройство управления наблюдателя, в котором производят их сравнение с данными, полученными от датчиков азимута и угла места. Результирующий разностный сигнал передают на индикаторы-указатели вертикального и горизонтального поворота устройства сканирования наблюдателя. Устройство ориентирования на местности содержит датчики местоположения и ориентации, устройство управления и вычислений, приемопередатчики, устройство сканирования для наблюдателя с индикаторами-указателями вертикального и горизонтального поворота, датчики положения в пространстве по азимуту и углу места, устройство определения собственных координат наблюдателя, имеющее навигационную аппаратуру, связанную со спутником. Приемопередатчик наблюдателя связан с групповым приемопередаточным устройством, соединенным с устройством управления и вычислений группового оборудования. Устройство управления и вычислений группового оборудования включает блок памяти, в котором содержится цифровая модель рельефа местности и база данных для целераспределения. Технический результат состоит в упрощении и увеличении надежности применения системы передачи оператору информации о направлении на местности. 2 с. и 1 з.п. ф-лы, 2 ил.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ И ОГНЕМ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ (ВАРИАНТЫ) | 1999 |
|
RU2167380C2 |
| МНОГОКАНАЛЬНОЕ УСТРОЙСТВО НАБЛЮДЕНИЯ | 1997 |
|
RU2145433C1 |
| СИСТЕМА НАБЛЮДЕНИЯ УДАЛЕННЫХ ОБЪЕКТОВ | 1995 |
|
RU2085979C1 |
| ЛАЗЕРНЫЙ ПРИЦЕЛ-ДАЛЬНОМЕР | 1991 |
|
RU2088883C1 |
| DE 19949800 A1, 19.04.2001 | |||
| US 5621646 А, 15.04.1997. | |||

