Изобретение относится к области самоходных артиллерийских орудий с гироскопической системой управления наведением и предназначено для решения боевых задач на закрытых огневых позициях (ОП).
Известны самоходные артиллерийские орудия (САО), например 2С3М [1], состоящие из шасси, установленной на нем башни (вращающейся части), в которой размещено собственно артиллерийское орудие (качающаяся часть), приводы вертикального и горизонтального наведения, прицельное приспособление, средства радио- и проводной связи.
При решении боевой задачи на закрытой ОП с помощью пункта управления определяют координаты позиции, ориентируют САО в основном направлении стрельбы, определяют значения основных угломеров по видимым точкам наводки и дирекционные углы направлений на точки наводки с ОП, на пункте управления рассчитывают и передают по речевым средствам связи на САО установки стрельбы, включая углы горизонтального наведения относительно выбранных точек наводки (угломеры) и углы вертикального наведения (прицелы), наводят САО с помощью прицельного приспособления, используя одну из видимых точек наводки на местности.
Недостатками существующих САО с точки зрения их применения в современном маневренном бою, характеризующемся быстротечностью и активной контрбатарейной борьбой, являются:
- сложность наведения и восстановления наводки САО при ограниченной видимости точки наводки (в т.ч. ночью и в условиях запыленности и задымленности ОП), а при отсутствии видимости точки наводки невозможность как наведения, так и восстановления наводки;
- необходимость ручного горизонтирования прицельного приспособления и ввода установок стрельбы (угломера и прицела) в прицельное приспособление, что в значительной степени зависит от квалификации наводчика;
- необходимость внешних, но отношению к САО, средств топогеодезической подготовки ОП и расчета установок стрельбы (пункта управления);
- отсутствие объективного контроля со стороны пункта управления правильности наведения САО.
Известно также САО 2С19 [2], включающее шасси, установленную на нем вращающуюся часть (башню), связанную с силовой частью привода горизонтального наведения, размещенную на ней качающуюся часть (орудие), связанную с силовой частью привода вертикального наведения, прицельное приспособление, одновременно являющееся терминалом наводчика и механически связанное с качающейся частью, средства радио- и проводной связи, прибор ввода-вывода информации (терминал) заряжающего, прибор командира орудия, выполняющий функции, как вычислительного устройства, так и прибора ввода-вывода информации (терминала) командира орудия, и блок передачи данных, выполняющий функции аппаратуры передачи данных, входы-выходы которого соединены с входами-выходами средств связи, а вход - с выходом прибора командира орудия.
Недостатками прототипа являются:
- невозможность автономного определения текущих координат местоположения САО и дирекционного угла положения оси канала ствола;
- затрудненность вертикального и горизонтального наведения и восстановления наводки в условиях ограниченной видимости точек наводки;
- отсутствие возможности объективного контроля углов положения ствола со стороны пункта управления.
Изобретение направлено на расширение функциональных возможностей САО за счет обеспечения вертикального и горизонтального наведения САО независимо от условий видимости точек наводки, автономной (без участия пункта управления) подготовки закрытой ОП (определения координат и дирекционных углов), автоматического расчета установок стрельбы на орудии по заданным координатам точек прицеливания, объективного контроля правильности наведения.
Это достигается тем, что:
Вариант 1. В САО, состоящее из шасси, установленной на нем вращающейся части (башни), связанной с приводами горизонтального наведения, размещенной на ней качающейся части (орудия), связанной с приводами вертикального наведения, прицельного приспособления, механически связанного с качающейся частью, средств связи (радио и проводной), приборов ввода-вывода информации членов экипажа и блока обработки, выполняющего функции вычислительного устройства и аппаратуры передачи данных, входы-выходы которого соединены с входами-выходами средств связи, входами-выходами приборов ввода-вывода информации членов экипажа и входами-выходами прицельного приспособления, введены гироскопический прибор, связанный с вращающейся частью, датчик угла возвышения, механически связанный с качающейся частью, приемоиндикатор спутниковых навигационных систем и механические датчики скорости, механически связанные с ходовой частью шасси, причем выходы гироскопического прибора, датчика угла возвышения, приемоиндикатора спутниковых навигационных систем и механических датчиков скорости соединены с соответствующими входами блока обработки.
Вариант 2. В САО, состоящее из шасси, установленной на нем прощающейся части (башни), связанной с приводами горизонтального наведения, качающейся части (орудия), связанной с приводами вертикального наведения, прицельного приспособления, механически связанного с качающейся частью, средств связи (радио и проводной), приборов ввода-вывода информации членов экипажа и блока обработки, выполняющего функции вычислительного устройства и аппаратуры передачи данных, входы-выходы которого соединены с входами-выходами средств связи, входами-выходами приборов ввода- вывода информации членов экипажа и входами-выходами прицельного приспособления, введены гироскопический прибор, связанный с вращающейся частью, датчик угла возвышения, механически связанный с качающейся частью, приемоиндикатор спутниковых навигационных систем и механические датчики скорости, механически связанные с ходовой частью шасси, причем выходы гироскопического прибора, датчика угла возвышения, приемоиндикатора спутниковых навигационных систем и механических датчиков скорости соединены с соответствующими входами блока обработки, а его выходы с входами приводов горизонтального и вертикального наведения, которые выполнены автоматическими.
В САО по вариантам 1 и 2 в качестве гироскопического прибора используется система самоориентирующаяся гироскопическая курсокреноуказания.
В САО по варианту 2 в качестве автоматических приводов вертикального и горизонтального наведения используется объединенный автоматический привод вертикального и горизонтального наведения.
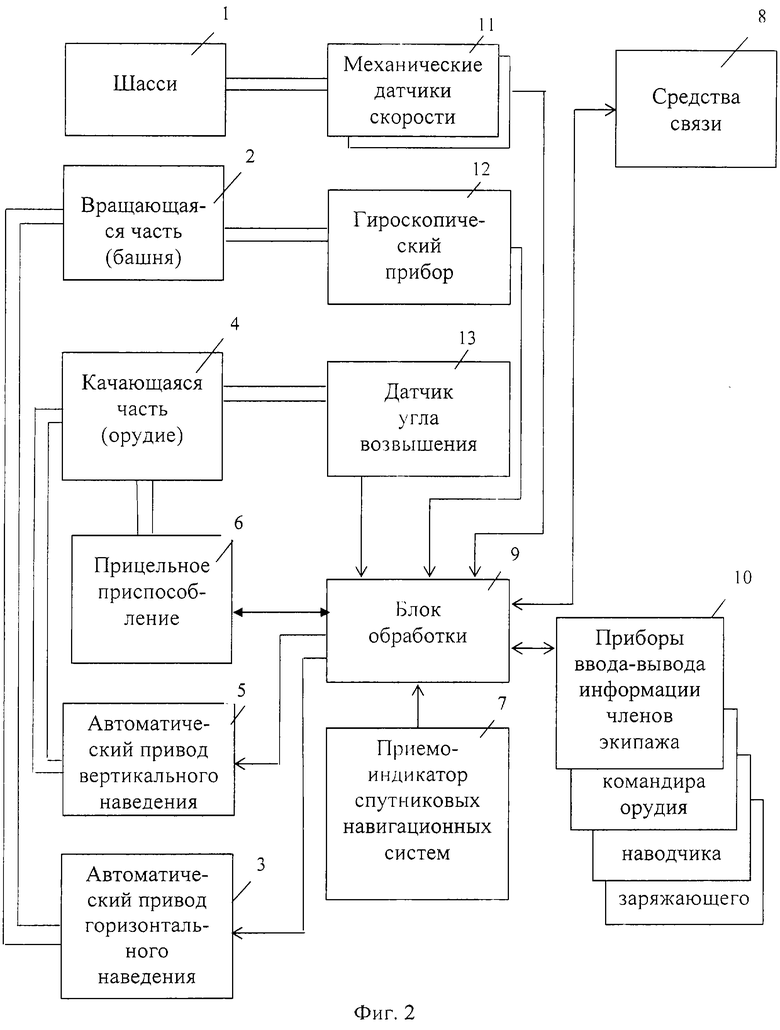
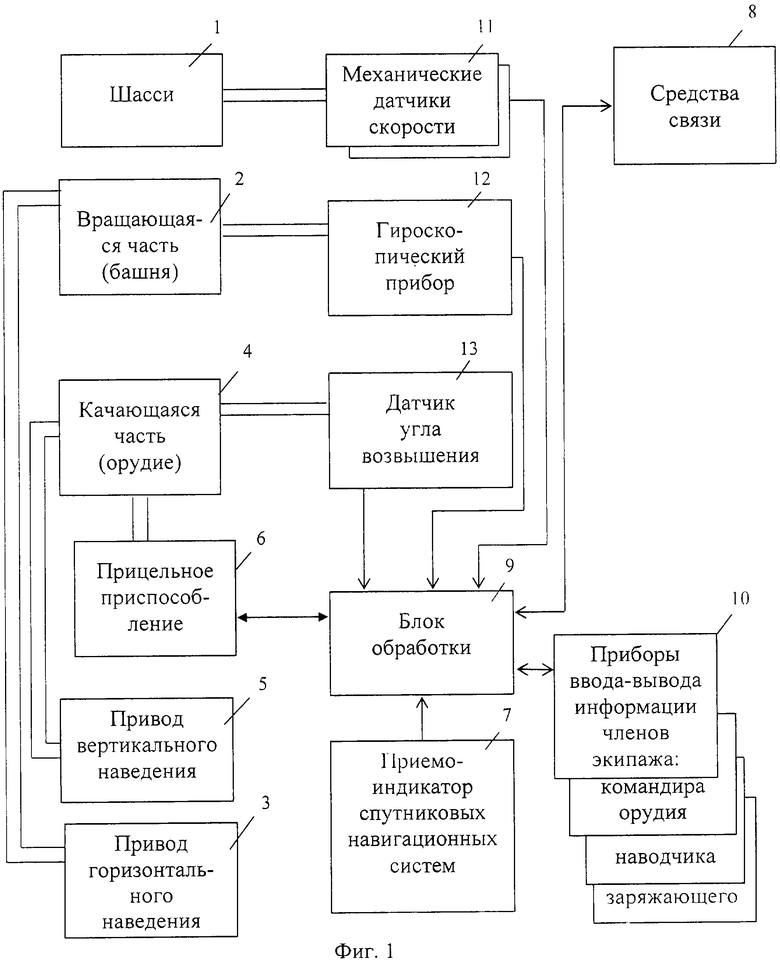
Сущность изобретения поясняется чертежами, где на фиг.1 приведена структурная схема САО варианта 1. а на фиг.2 - структурная схема САО варианта 2.
Сведения, подтверждающие возможность осуществления изобретения с указанным выше техническим результатом, заключаются в следующем.
Вариант 1.
САО (фиг.1) содержит шасси 1, размещенную на нем вращающуюся часть (башню) 2, механически связанную с силовой частью (на схеме не показано) привода горизонтального наведения 3, размещенную на ней качающуюся часть (собственно артиллерийское орудие) 4, механически связанную с силовой частью (на схеме не показано) привода вертикального наведения 5, прицельное приспособление 6, механически связанное с осью цапф (на схеме не показано) артиллерийского орудия 4 (качающейся частью), приемоипдикатор спутниковых навигационных систем 7, средства связи (радио и проводной) 8, блок обработки 9, выполняющий функции вычислительного устройства и аппаратуры передачи данных, приборы ввода-вывода информации 10 членов экипажа (командира орудия, наводчика и заряжающего), механические датчики скорости 11, механически связанные с ходовой частью шасси 1, гироскопический прибор 12, механически связанный с вращающейся частью 2 и датчик угла возвышения 13, механически связанный с осью цапф артиллерийского орудия 4 (качающейся частью), причем входы-выходы блока обработки 9 соединены с входами-выходами средств связи 8, входами-выходами приборов ввода-вывода информации 10 членов экипажа и входами-выходами прицельного приспособления 6, выходы механических датчиков скорости 11, гироскопического прибора 12, датчика угла возвышения 13 и приемоиндикатора спутниковых навигационных систем 7 соединены с соответствующими входами блока обработки 9.
Вариант 2.
САО (фиг.2) содержит шасси 1, размещенную на нем вращающуюся часть (башню) 2, механически связанную с силовой частью (на схеме не показано) привода горизонтального наведения 3, размещенную на ней качающуюся часть (орудие) 4, механически связанную с силовой частью (на схеме не показано) привода вертикального наведения 5, прицельное приспособление 6, механически связанное с осью цапф (на схеме не показано) артиллерийского орудия 4 (качающейся частью), приемоиндикатор спутниковых навигационных систем 7, средства связи (радио и проводной) 8, блок обработки 9. выполняющий функции вычислительного устройства и аппаратуры передачи данных, приборы ввода-вывода информации 10 членов экипажа (командира орудия, наводчика и заряжающего), механические датчики скорости 11, механически связанные с ходовой частью шасси 1, гироскопический прибор 12, механически связанный с вращающейся частью 2 и датчик угла возвышения 13, механически связанный с осью цапф орудия 4 (качающейся частью), причем входы-выходы блока обработки 9 соединены с входами-выходами средств связи 8, входами-выходами приборов ввода-вывода информации 10 членов экипажа и входами-выходами прицельного приспособления 6, выходы механических датчиков скорости 11, гироскопического прибора 12, датчика угла возвышения 13 и приемоиндикатора спутниковых навигационных систем 7, соединены с соответствующими входами блока обработки 9, а его выходы с входами приводов горизонтального наведения 3 и вертикального наведения 5, которые выполнены автоматическими.
САО по вариантам 1 и 2 (фиг.1 и 2), в которых в качестве гироскопического прибора используется система самоориентирующаяся гироскопическая курсокреноуказания.
САО по варианту 2 (фиг.2), в котором в качестве автоматических приводов горизонтального и вертикального наведения использован объединенный автоматический привод горизонтального и вертикального наведения.
САО функционирует следующим образом.
Вариант 1 (фиг.1).
Вначале определяются: начальный дирекционный угол оси канала ствола орудия 4 любым известным в артиллерии способом, который записывается через прибор ввода-вывода информации 10 командира орудия в блок обработки 9, и начальные координаты местоположения САО, получаемые с помощью приемоиндикатора спутниковых навигационных систем 7. Затем во время движения блок обработки 9 рассчитывает текущие координаты САО по информации о пройденном пути с механических датчиков скорости 11 и информации о текущих углах ориентации шасси 1, получаемый с гироскопического прибора 12 при фиксации в походном положении относительно шасси 1 башни 2, с которой механически связан гироскопический прибор 12.
При занятии ОП и подготовке стрельбы по имеющимся текущим координатам местоположения САО дирекционному углу ориентации оси артиллерийского орудия 4 и исходным данным для расчета, получаемым с пункта управления через средства связи 8 (координаты точек прицеливания, вид стрельбы, метеоданные и др.), блок обработки 9 рассчитывает установки стрельбы и отображает их на приборах ввода-вывода информации 10 членов экипажа, например, на приборе ввода-вывода информации наводчика - данные о заданных углах вертикального и горизонтального наведения.
При наведении орудия данные о текущих углах разворота и наклонах башни с гироскопического прибора 12 и о текущих углах возвышения ствола с датчика угла возвышения 13 поступают в блок обработки 9, где вычисляются и передаются на прибор ввода-вывода информации 10 наводчика для индикации величины рассогласований вертикального и горизонтального наведения, как разности между заданными и текущими углами наведения.
Наводчик с помощью приводов наведения 3 и 5 разворачивает башню 2 и изменяет угол возвышения орудия 4 так, чтобы значения рассогласований вертикального и горизонтального наведения, отображаемые на приборе ввода-вывода информации наводчика были равны нулю, добиваясь тем самым заданных углов наведения по вертикали и горизонту. Если в процессе стрельбы углы наведения сбиваются, т.е. происходит разворот САО или изменяются его углы наклона, то по информации с гироскопического прибора 12 и датчика угла возвышения 13, в блоке обработки 9 вновь вычисляются величины текущих рассогласований и передаются на прибор ввода-вывода информации 10 наводчика для индикации, после чего путем разворота башни 2 и изменения угла возвышения орудия 4, наводчик, контролируя рассогласование по показаниям прибора ввода-вывода информации 10 наводчика, вновь восстанавливает заданные углы наведения, т.е. когда рассогласования вертикального и горизонтального наведения равны нулю.
Таким образом наводчик осуществляет наведение орудия 4 на заданные углы наведения и восстановление их в процессе стрельбы без использования прицельного приспособления 6 и видимых точек наводки на местности, а контролирует наводку только по показаниям, отображаемым на приборе ввода-вывода информации 10 наводчика, при этом командир орудия осуществляет контроль за наведением орудия и ведением стрельбы по прибору ввода-вывода информации 10 командира.
Прицельное приспособление 6 используется в этом случае, как устройство, обеспечивающее дополнительные функции, в частности участвующее в определении начального дирекционного угла оси канала ствола орудия 4, например методом взаимного визирования с пунктом управления (машиной старшего офицера батареи), а также как дублирующее устройство для наведения орудия при наличии видимых точек наводки.
При необходимости с пункта управления через средства связи 8 может быть сделан запрос и информация об углах положения башни 2 и ствола орудия 4 в пространстве автоматически передается на пункт управления для контроля старшему офицеру батареи.
При совершении противоогневого маневра САО оставляет основную ОП и перемещается на запасную. При этом по данным о текущем дирекционном угле оси канала ствола орудия 4 с гироскопического прибора 12 и о пройденном пути с механических датчиков скорости 11 блок обработки 9 определяет координаты местоположения САО и текущий дирекционный угол направления стрельбы, т.е. после занятия новой ОП САО может продолжить выполнение огневой задачи по описанному выше алгоритму.
Вариант 2 (фиг.2).
Вначале определяются: начальный дирекционный угол оси канала ствола орудия 4 любым известным в артиллерии способом, который записывается через прибор ввода- вывода информации 10 командира орудия в блок обработки 9 и начальные координаты местоположения САО, получаемые с помощью приемоиндикатора спутниковых навигационных систем 7.
Затем во время движения блок обработки 9 рассчитывает текущие координаты САО по информации о пройденном пути с механических датчиков скорости 11 и информации о текущих углах ориентации шасси 1, получаемой с гироскопического прибора 12 при фиксации в походном положении относительно шасси 1 башни 2, с которой механически связан гироскопический прибор 12.
При занятии ОП и подготовке стрельбы по имеющимся текущим координатам местоположения САО, дирекционному углу ориентации оси артиллерийского орудия 4 и исходным данным для расчета, получаемым с пункта управления через средства связи 8 (координаты точек прицеливания, вид стрельбы, метеоданные и др.), блок обработки 9 рассчитывает установки для стрельбы и отображает их на приборах ввода-вывода информации 10 членов экипажа, например на приборе ввода-вывода информации наводчика - данные о заданных углах вертикального и горизонтального наведения.
При наведении орудия данные о текущих углах разворота и наклонах башни с гироскопического прибора 12 и о текущих углах возвышения ствола с датчика угла возвышения 13 поступают в блок обработки 9, где вычисляются величины рассогласований горизонтального и вертикального наведения, как разности между заданными и текущими углами наведения и передаются на прибор ввода-вывода информации наводчика 10 для индикации и на автоматические приводы горизонтального 3 и вертикального 5 наведения для отработки.
Автоматический привод горизонтального наведения 3 автоматически разворачивает башню 2, отрабатывая величину рассогласования горизонтального наведения до нуля, а автоматический привод вертикального наведения 5 автоматически изменяет угол возвышения орудия 4, отрабатывая до нуля величину рассогласования вертикального наведения. В результате ствол орудия 4 занимает в пространстве заданные углы наведения, а значения рассогласований вертикального и горизонтального наведения, отображаемые на приборе ввода-вывода информации 10 наводчика будут равны нулю.
Если в процессе стрельбы углы наведения сбиваются, т.е. происходит разворот САО или изменяются его углы наклона, то по информации с гироскопического прибора 12 и датчика угла возвышения 13, в блоке обработки 9 вновь вычисляются величины текущих рассогласований и передаются на автоматические приводы горизонтального 3 и вертикального 5 наведения для отработки и на прибор ввода-вывода информации 10 наводчика для индикации. После чего автоматические приводы 3 и 5, автоматически отрабатывая величины рассогласований горизонтального и вертикального наведения до нуля, разворачивают башню 2 и ствол орудия 4 в заданное положение.
Таким образом, осуществляется автоматическое наведение башни 2 и орудия 4 САО на заданные углы наведения и восстановление их в процессе стрельбы без использования прицельного приспособления 6 и видимых точек наводки на местности, а контроль наводки осуществляет наводчик только по показаниям, отображаемым на приборе ввода-вывода информации 10 наводчика, при этом командир орудия осуществляет контроль за наведением орудия 4 и ведением стрельбы по прибору ввода-вывода информации 10 командира.
Прицельное приспособление 6 используется в этом случае, как устройство, обеспечивающее дополнительные функции, в частности участвующее в определении начального дирекционного угла оси канала ствола орудия 4, например методом взаимного визирования с пунктом управления (машиной старшего офицера батареи), а также как дублирующее устройство для наведения орудия при наличии видимых точек наводки.
При необходимости с пункта управления через средства связи 8 может быть сделан запрос и информация об углах положения башни 2 и ствола орудия 4 в пространстве автоматически передается на пункт управления для контроля старшему офицеру батареи.
При совершении противоогневого маневра САО оставляет основную ОП и перемещается на запасную. При этом по данным о текущем дирекционном угле оси канала ствола орудия 4 с гироскопического прибора 12 и о пройденном пути с механических датчиков скорости 11 блок обработки 9 определяет координаты местоположения САО и текущий дирекционный угол направления стрельбы, т.е. после занятия новой ОП САО может продолжить выполнение огневой задачи по описанному выше алгоритму.
При использовании в составе автоматизированного САО по вариантам 1 и 2 в качестве гироскопического прибора системы самоориентирующейся гироскопической курсокреноуказания определение начального дирекционного угла оси канала ствола орудия 4 осуществляется автономно без использования других средств (точек на местности с известными ориентирными направлениями, машины старшего офицера батареи и т.п.).
Опытный образец САО прошел полевые испытания, в том числе стрельбовые, и показал положительные результаты.
Литература
1. Изделие 2С3М. Техническое описание и инструкция по эксплуатации 2С3МТО1. Книга 1. Краткое техническое описание. - Ордена Трудового Красного Знамени военное издательство Министерства обороны СССР, М.: 1979.
2. Изделие 2С19. Техническое описание для экипажа 2С19ТО. Свердловск, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1995 |
|
RU2108614C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 1998 |
|
RU2150064C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ И ОГНЕМ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ (ВАРИАНТЫ) | 1999 |
|
RU2167380C2 |
| БОЕВОЕ ОТДЕЛЕНИЕ БРОНИРОВАННОЙ МАШИНЫ | 2003 |
|
RU2258889C2 |
| БОЕВОЙ МОДУЛЬ СО СТАБИЛИЗАЦИЕЙ ЛИНИИ ПРИЦЕЛИВАНИЯ ВООРУЖЕНИЯ | 2023 |
|
RU2816100C1 |
| БОЕВАЯ МАШИНА | 2010 |
|
RU2442097C1 |
| ТАНК С ЗЕНИТНЫМ ВООРУЖЕНИЕМ | 2002 |
|
RU2231737C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1998 |
|
RU2133435C1 |
Группа изобретений относится к области артиллерийского вооружения, в частности к самоходным артиллерийским орудиям (САО). Сущность изобретений заключается в том, что в САО введены приемоиндикатор спутниковых навигационных систем, гироскопический прибор, механически связанный с вращающейся частью, датчик угла возвышения, механически связанный с качающейся частью, и механические датчики скорости, механически связанные с ходовой частью шасси. По первому варианту выходы гироскопического прибора, датчика угла возвышения, приемоиндикатора спутниковых навигационных систем и механических датчиков скорости соединены с соответствующими входами блока обработки. По второму варианту входы блока обработки соединены с выходами гироскопического прибора, датчика угла возвышения, приемоиндикатора спутниковых навигационных систем и механических датчиков скорости, а его выходы - с входами приводов горизонтального и вертикального наведения, которые выполнены автоматическими. Реализация изобретений позволяет расширить функциональные возможности САО за счет обеспечения автономного вертикального и горизонтального наведения орудия с закрытой огневой позиции и автоматического расчета установок стрельбы по заданным координатам точек прицеливания. 2 н. и 3 з.п. ф-лы, 2 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ (ВАРИАНТЫ) | 1998 |
|
RU2150064C1 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1998 |
|
RU2133435C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 1999 |
|
RU2169337C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ И ОГНЕМ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ (ВАРИАНТЫ) | 1999 |
|
RU2167380C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 4387624 А, 14.06.1983 | |||
| АБСОРБИРУЮЩИЕ ИЗДЕЛИЯ, СОДЕРЖАЩИЕ ПОЛИОРГАНОСИЛОКСАНОВЫЕ ПОЛИМЕРЫ С КОНДИЦИОНИРУЮЩИМ ДЕЙСТВИЕМ | 2013 |
|
RU2605095C2 |
| DE 3332795 A1, 28.03.1985. | |||

