Изобретение относится к области навигационного приборостроения, а именно к навигационным системам, используемых для определения основных навигационных параметров позиционирования наземных объектов. Технический результат - расширение эксплуатационных и функциональных возможностей как самой навигационной системы, так и объекта ее применения.
Изобретение может быть использовано при создании и изготовлении современных систем для ориентации, навигации, наведения и прицеливания вооружения объектов военного назначения (далее по тексту - ОВН) и устройств наземной техники.
Известна наземная гироскопическая навигационная система для подвижных объектов по патенту РФ №2308681 (МПК G01C 19/38), выполненная на базе трехстепенного астатического (уравновешенного) гироскопа, центр тяжести которого совпадает с точкой пересечения осей его карданова подвеса. Указанная система позволяет обеспечить повышение точности гироскопической навигационной информации о положении подвижного ОВН как на стоянке, так и в процессе движения, что в основном достигается за счет введения коррекции от внешних источников навигационной информации, таких как спутниковая навигационная система и использования цифровой электронной карты местности.
Изобретение по патенту РФ №2308681 (МПК G01C 19/38) в свою очередь реализовано в наземной гироскопической навигационной системе «Трона-1» МКРН.462414.003, выполненной по схеме электрической соединений МКРН.462414.003 Э4 и описанной в МКРН.462414.003 РЭ, ТУ. Данная гироскопическая навигационная система (далее по тексту - НС) принята за прототип.
Гироскопическая НС в основном состоит из следующих узлов:
- гирокурсоизмерителя (ГКИ), выполненного на базе трехстепенного астатического гироскопа, ось собственного вращения которого удерживается в плоскости горизонта системой горизонтальной коррекции, состоящей из датчика жидкостного маятникового как чувствительного элемента горизонтальной плоскости и моментного двигателя как исполнительного элемента. На оси наружной рамы гироскопа установлен в качестве датчика угла редуктосин, выход редуктосина подключен к входу аналого-цифрового преобразователя (АЦПВТ), выход которого подключен к входу микроконтроллера (МК), обеспечивающего функции преобразователя информации и управления. В корпусе гирокурсоизмерителя (ГКИ) установлен электронный инвертор - преобразователь (П), обеспечивающий преобразование постоянного напряжения +27 В бортсети ОВН в трехфазное переменное напряжение 36 В 400 Гц, необходимое для питания гиромотора астатического гироскопа и схемы горизонтальной коррекции гирокурсоизмерителя (ГКИ);
- антенны (А-СНС) спутниковой навигационной системы (далее по тексту - СНС), обеспечивающей получение навигационной информации по спутниковому каналу связи (ГЛОНАС, GPS) и передачу ее через приемник (П-СНС) в картографический процессор (КП) электронного картографа (ЭК);
- датчика пути - одометра (ДП) и формирователя импульсов (ФИ), обеспечивающих получение информации о пройденном ОВН пути. Выход формирователя импульсов (ФИ) подключен к соответствующему входу микроконтроллера (МК) гирокурсоизмерителя (ГКИ);
- электронного картографа (ЭК), являющегося внешним устройствам управления и обработки информации, получаемой с выхода микроконтроллера (МК) гирокурсоизмерителя (ГКИ). Электронный картограф (ЭК) в свою очередь состоит из картографического процессора (КП), электронного индикатора - дисплея (Д), панели управления (ПУ), устройства загрузки (УЗ), приемника (П-СНС) и блока питания (БП ЭК) вышеуказанных внутренних элементов электронного картографа. К соответствующим входам картографического процессора (КП) подключены выходы электронного индикатора - дисплея (Д), панели управления (ПУ), устройства загрузки (УЗ) и приемника (П-СНС) СНС.
Гироскопическая навигационная система работает следующим образом.
После включения гироскопической НС с панели управления (ПУ) электронного картографа (ЭК) оператором производится ввод исходных данных (Xисх, Yисх, αисх, Xп.н., Yп.н.) и через устройство загрузки (УЗ) производится загрузка в картографический процессор (КП) электронной карты необходимой местности.
Гироскопическая НС может работать в трех режимах: автономном, спутниковом и интегрированном.
Для работы в автономном режиме гироскопическая НС использует первое основное свойство трехстепенного астатического гироскопа, когда главная ось гироскопа стремится удержать неизменным свое направление в инерциальном пространстве. Это в свою очередь означает, что если главная ось гироскопа направлена на какую-либо цель (координату), то при любых перемещениях основания, на котором установлен гироскоп, она будет неизменно указывать на эту цель, изменяя свою ориентацию в системе координат, связанной с Землей.
В автономном режиме сигнал с редуктосина, соответствующий величине изменения дирекционного угла ОВН, поступает на вход (АЦПВТ), который в свою очередь передает значение угла в параллельном коде на соответствующий вход микроЭВМ (МК). Сигналы датчика пути (ДП), несущие информацию о пройденном ОВН пути, преобразуются в формирователе (ФИ) в трехфазную последовательность импульсов прямоугольной формы, фаза которых определяет направление движения ОВН, а частота следования - скорость движения ОВН. Импульсы прямоугольной формы поступают на соответствующий вход микроЭВМ (МК) для последующего учета в качестве элементарных отрезков ΔSi при разложении на две составляющие в прямоугольной системе координат в соответствии с формулами (1) и (2):

 ,
,
где ΔSi - отрезок пути, пройденный ОВН;
Xi, Yi - текущие координаты ОВН;
αi - текущее значение дирекционного угла ОВН.
Сигналы с (АЦПВТ) и формирователя (ФИ) воспринимаются микро-ЭВМ (МК) как входная информация и обрабатывается по необходимым для этих сигналов алгоритмам, при этом по сигналу от (АЦПВТ) определяются приращения дирекционного угла Δαi, после чего рассчитывается текущее значение дирекционного угла ОВН αi как сумма исходного дирекционного угла αисх и приращений дирекционного угла Δαi, полученных за время движения ОВН от исходной точки до текущей, по формуле (3).

Элементарные отрезки пути ΔS раскладываются на составляющие в соответствии с формулами (1) и (2), суммируются со значениями исходных координат в соответствии с формулами (4) и (5) и со значениями исходных разностей координат пункта назначения и ОВН в исходном пункте.


В соответствии с изменившимися значениями разностей координат пункта назначения и объекта в микроЭВМ (МК) по соответствующим алгоритмам вычисляется дирекционный угол на пункт назначения от нового местоположения ОВН. Таким образом, на выходе микроЭВМ (МК) имеется информация о текущих координатах и дирекционном угле ОВН, координатах цели, дирекционном угле на пункт назначения и дальности до него, которая поступает на вход картографа (ЭК).
В режиме спутниковой навигации определение координат ОВН обеспечивает приемник СНС (П-СНС), конструктивно размещенный в картографе. Антенна приемника (А-СНС) принимает сигналы от навигационных космических аппаратов (далее по тексту - НКА) и передает в приемник (П-СНС) для расчета координат. Координаты ОВН рассчитываются по псевдодальностям до НКА. Псевдодальности рассчитываются по временным задержкам Ti «i-й НКА-потребитель» и известной скорости распространения радиоволн с:

Ti измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приемнике копий этих кодов с учетом априори известных моментов излучений сигналов НКА.
Найденные в ходе навигационных определений прямоугольные геоцентрические координаты X, Y, Z преобразуются в координаты Гаусса-Крюгера и передаются в картографический процессор для отображения местоположения ОВН на экране картографа на фоне электронной карты.
В интегрированном режиме на соответствующие входы микроЭВМ (МК) поступают сигналы с выходов (АЦПВТ) и формирователя (ФИ). Полученная после обработки в микроЭВМ (МК) навигационная информация передается в картографический процессор (КП) электронного картографа (ЭК), где в совокупности с информацией с приемника (П-СНС) о координатах ОВН при их совместной (интегрированной) обработке позволяет:
- обеспечить повышение точности выдачи угловой информации;
- реализовать практически непрерывный процесс коррекции текущих координат ОВН за счет применения двух разнородных источников информации;
- производить оценку и калибровку дрейфа ГКИ;
- производить оценку погрешностей датчика пути, тем самым повышая точность определения текущих координат ОВН.
Недостатками вышеуказанной конструкции навигационной системы-прототипа являются;
- достаточно большое время начального запуска (готовности к работе) не менее 13 мин;
- использование дополнительного внутреннего источника трехфазного переменного напряжения 36 В 400 Гц, необходимого для обеспечения вращения гиромотора, применяемого астатического гироскопа и питания горизонтальной схемы коррекции ГКИ;
- наличие подвижных и сложных механических деталей в ГКИ, что приводит к усложнению конструкции в целом;
- сравнительно небольшой срок службы навигационной системы из-за износа быстровращающихся подвижных элементов ГКИ;
- высокое энергопотребление (300 Вт в нормальных климатических условиях);
- большие габариты ГКИ (222×231×275), устанавливаемого в ОВН, что в некоторых случаях при принятии решения об использовании данной навигационной системы является решающим фактором;
- низкая устойчивость к воздействию ударов одиночного действия, имеющих место в боевых условиях эксплуатации при обстреле ОВН без разрушения его тыльной части брони;
- наличие жидкостного маятникового датчика в контуре горизонтальной коррекции, который в реальных условиях эксплуатации при наличии широкополосной вибрации, имеющей место в реальных условиях эксплуатации ОВН, может «закипать» (жидкость внутри датчика начинает пузыриться), что приводит к потере информации по определению гирогоризонта ГКИ (неправильной работе собственной схемы коррекции);
- наличие значительной статической ошибки от моментов сил сухого трения в осях подвеса и токоподводах электромеханической схемы горизонтальной коррекции. Это приводит к медленной прецессии осей вращения трехстепенного астатического гироскопа и требует проведения регулярной его калибровки в течение всего срока эксплуатации навигационной системы;
- отсутствие возможности определения углов наклона (крен, тангаж) местности (в данной НС - прототипе, как допущение, эти углы считаются всегда равными нулю), в связи с чем при движении ОВН по земной поверхности с большим перепадом высот уменьшается точность определения его координат местоположения. Данное допущение увеличивает ошибку при вычислении координат на среднепересеченной местности на 0,2-0,3% от пройденного пути при работе НС в автономном режиме;
- необходимость использования оператором НС дополнительных средств для определения исходного дирекционного угла αисх ОВН (буссолей, магнитометров, систем спутниковой навигации и др.);
- невозможность полной реализации алгоритма стрельбы с закрытых позиций из установленного на ОВН вооружения;
- отсутствие возможности обеспечения настройки, контроля и диагностики внешних систем, установленных на ОВН.
Техническими задачами заявляемого изобретения являются:
- уменьшение времени готовности к работе (времени начального запуска) до 2 с;
- исключение дополнительного внутреннего источника трехфазного переменного напряжения 36 В 400 Гц;
- упрощение и, как следствие, повышение надежности конструкции системы;
- увеличение срока службы многофункциональной навигационной системы (далее по тексту - МНС);
- уменьшение энергопотребления системы до 50 Вт в нормальных климатических условиях;
- уменьшение габаритных размеров датчика наклона и курса (далее по тексту - ДНК);
- повышение инвариантности к внешним ускорениям, устойчивости к воздействию ударов одиночного действия;
- исключение электромеханической схемы горизонтальной коррекции с жидкостным маятниковым датчиком;
- обеспечение определения (учета в алгоритме) углов наклона местности (крен, тангаж) при движении ОВН по земной поверхности с большим перепадом высот, что позволит поднять точность определения координат местоположения ОВН в автономном режиме работы;
- обеспечение автономного определения углов ориентации ОВН (дирекционного угла αисх, крена, тангажа) в режиме начального ориентирования без использования информации от других навигационных систем (магнитометров, систем спутниковой навигации и др.);
- возможность реализации полноценного режима стрельбы с закрытых позиций по ненаблюдаемой цели;
- обеспечение настройки, контроля и диагностики внешних систем (СУО, СВ, ИУСШ), установленных на ОВН;
- обеспечение навигационного режима работы с места механика водителя (MB) ОВН с возможностью указания ему командиром ОВН требуемого направления движения ОВН.
Для достижения указанного технического результата в известную систему навигации (СН), содержащую датчик пути (ДП) с формирователем импульсов (ФИ), электронный картограф (ЭК) с картографическим процессором (КП), электрически связанный с внешними устройствами (ВУ) ОВН информационными каналами связи, дисплеем (Д), панелью управления (ПУ), устройством загрузки (УЗ), приемником спутниковой системы (П-СНС), выходы которых электрически связаны соответственно с первым, вторым, третьим и четвертым входами картографического процессора (КП), блок питания электронного картографа (БП ЭК), вход которого электрически соединен с бортсетью +27 В ОВН, а выходы соединены с соответствующими входами картографического процессора (КП), дисплея (Д), панели управления (ПУ) и устройства загрузки (УЗ), антенну спутниковой навигационной системы (А-СНС), электрически связанную с приемником спутниковой навигационной системы (П-СНС), дополнительно введен датчик наклона и курса, включающий в себя:
- блок питания датчика наклона и курса (БП ДНК);
- три датчика абсолютных угловых скоростей (ДУС-X, Y, Z) по трем ортогональным осям;
- три акселерометра по трем ортогональным осям (АК-X, AK-Y, AK-Z);
- датчик температуры (ДТ);
- блок контроллеров (БК),
причем чувствительные элементы трех датчиков абсолютных угловых скоростей (ДУС-X, Y, Z) и трех акселерометров (АК-Х, AK-Y, AK-Z) жестко связаны через корпус датчика наклона и курса с корпусом шасси ОВН,
a вход блока питания датчика наклона и курса (БП ДНК) с одной стороны электрически связан с бортсетью +27 В ОВН, с другой стороны - с соответствующими входами трех датчиков абсолютных угловых скоростей (ДУС-X, Y, Z), входами трех акселерометров (АК-X, АК-Y, АК-Z), датчика температуры (ДТ) и блока контроллеров (БК), а выходы трех датчиков абсолютных угловых скоростей (ДУС-X, Y, Z) по трем ортогональным осям, выходы трех акселерометров (АК-X, AK-Y, АК-Z) по трем ортогональным осям и датчика температуры (ДТ) электрически связаны соответственно с первым, вторым, третьим, четвертым и пятым входами блока контроллеров (БК), который в свою очередь, электрически связан с картографическим процессором (КП) электронного картографа (ЭК), датчиком пути (ДП) с формирователем импульсов (ФИ) электрически связанного с бортсетью +27 В ОВН и с входом/выходом внешнего(их) устройств(а) ОВН с информационным каналом связи, например, с информационно-управляющей системой шасси ОВН с блоком отображения информации (БОИ),
при этом картографический процессор (КП) электронного картографа (ЭК), в свою очередь, электрически связан с входом/выходом внешних устройств ОВН по информационным каналам связи, например, с системой управления огнем (СУО) ОВН с датчиком положения вооружения в плоскости ВН (ДПВ-ВН) и стабилизатором вооружения (СВ) ОВН с датчиком положения боевого модуля в плоскости ГН (ДПБМ-ГН),
причем стабилизатор вооружения (СВ) ОВН с датчиком положения боевого модуля в плоскости ГН (ДПБМ-ГН), в свою очередь, электрически связан с системой управления огнем (СУО) ОВН с датчиком положения вооружения в плоскости ВН (ДПВ-ВН).
Сопоставительный анализ с прототипом показывает, что заявляемая многофункциональная навигационная система отличается наличием новых элементов, а именно:
- датчика наклона и курса (ДНК) с:
- блоком питания датчика наклона и курса (БП ДНК);
- трех датчиков абсолютных угловых скоростей (ДУС-X, Y, Z) по трем ортогональным осям;
- трех акселерометров по трем ортогональным осям (АК-X, АК-Y, AK-Z);
- датчиком температуры (ДТ);
- блоком контроллеров (БК);
- информационных каналов связи с внешними системами, а именно с:
- стабилизатором вооружения (СВ) с датчиком положения боевого модуля в плоскости ГН (ДПБМ-ГН);
- системой управления огнем (СУО) ОВН с датчиком положения вооружения в плоскости ВН (ДПВ-ВН);
- информационно-управляющей системой шасси (ИУСШ) с блоком отображения информации (БОИ),
и их связями с другими элементами многофункциональной навигационной системы МНС и ОВН.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые элементы достаточно хорошо известны в технике, но их введение в указанной связи в указанную многофункциональную навигационную систему (МНС) для подвижных ОВН позволяет:
- уменьшить время готовности к работе (время начального запуска) до 2 с за счет использования твердотельных датчиков абсолютной угловой скорости и ускорения;
- исключить необходимость использования дополнительного внутреннего источника трехфазного переменного напряжения 36 В 400 Гц, за счет использования твердотельных датчиков абсолютной угловой скорости (волоконно-оптических гироскопов) и ускорения (акселерометров), использующих для питания только постоянное напряжение;
- упростить и повысить надежность конструкции многофункциональной навигационной системы за счет применения современных датчиков абсолютной угловой скорости и ускорения, позволяющих исключить необходимость применения подвижных, сложных и быстровращающихся механических деталей и узлов;
- увеличить срок службы многофункциональной навигационной системы за счет применения элементной базы, не содержащей в своем составе быстровращающихся подвижных элементов;
- уменьшить энергопотребления системы до 50 Вт в нормальных климатических условиях за счет применения новой энергоэффективной современной датчиковой и цифровой элементной базы;
- уменьшить габариты размеров ДНК (более чем в 5,7 раза) и его вес за счет применения современной элементной базы, имеющей малые габариты и вес;
- повысить инвариантность к внешним ускорениям, работоспособность и устойчивость к воздействию ударов одиночного действия за счет применения современной элементной базы, имеющей малый вес и монолитную внутреннюю конструкцию;
- исключить схему электромеханической горизонтальной коррекции с жидкостным маятниковым датчиком, за счет использования современной микропроцессорной техники, позволяющей выполнять сложные математические расчеты по определению плоскости горизонта, дирекционного угла и полного набора навигационных координат, используя данные от трех ортогонально расположенных волоконно-оптических гироскопов, размещенных в едином корпусе ДУС и трех ортогонально расположенных акселерометров, используемых в конструкции ДНК МНС;
- исключить статическую ошибку, возникающую в гирокурсоизмерителе от моментов сил сухого трения в осях карданова подвеса и токоподводах электромеханической схемы горизонтальной коррекции, за счет отсутствия в конструкции указанных механических пар;
- обеспечить определение (учета в алгоритме работы МНС) углов наклона местности (крен, тангаж) при движении ОВН по земной поверхности с большим перепадом высот, что позволяет поднять точность определения координат местоположения ОВН в автономном режиме работы. Это достигается за счет наличия в конструкции ДНК МНС трех ортогонально расположенных волоконно-оптических гироскопов, размещенных в едином корпусе ДУС и трех ортогонально расположенных акселерометров и комплексной обработкой данной информации БК ДНК;
- обеспечить автономное определение углов ориентации ОВН (дирекционного угла αисх, крена, тангажа) в режиме начального ориентирования без использования информации от других навигационных систем (магнитометров, систем спутниковой навигации и др.). Это обеспечивается за счет математической обработки информации, получаемой от трех ортогонально расположенных волоконно-оптических гироскопов, размещенных в едином корпусе ДУС и трех ортогонально расположенных акселерометров, используемых в конструкции ДНК МНС;
- ввести полный набор необходимой аппаратуры и каналов информационного взаимодействия для реализации полноценного режима стрельбы из вооружения ОВН с закрытых позиций по ненаблюдаемой цели, а именно сигналов с датчиков положения установленного на ОВН вооружения и цифровых каналов информационного взаимодействия (обмена) с СУО и СВ ОВН;
- обеспечить настройку, контроль и диагностику внешних систем (СУО, СВ, ИУСШ), установленных на ОВН при помощи меню, выводимого на дисплей картографа, что позволяет целостно интегрировать навигационную систему в электрооборудование ОВН. Это обеспечивается за счет введения в структуру МНС дополнительных информационных каналов взаимодействия (обмена) с указанными внешними системами ОВН;
- обеспечить навигационный режим работы с места механика водителя (MB) ОВН с возможностью указания ему оператором (командиром) ОВН требуемого направления движения ОВН за счет вывода текущей карты местности и текущего положения ОВН на дисплей блока отображения информации информационно-управляющей системы шасси, установленного на месте MB.
При проведении поиска по патентным и научно-техническим источникам информации не выявлено источников, содержащих сведения о совокупности признаков, аналогичной или идентичной совокупности признаков заявляемой многофункциональной системы навигации. Это позволяет сделать вывод, что заявляемое решение является новым и обладает изобретательским уровнем.
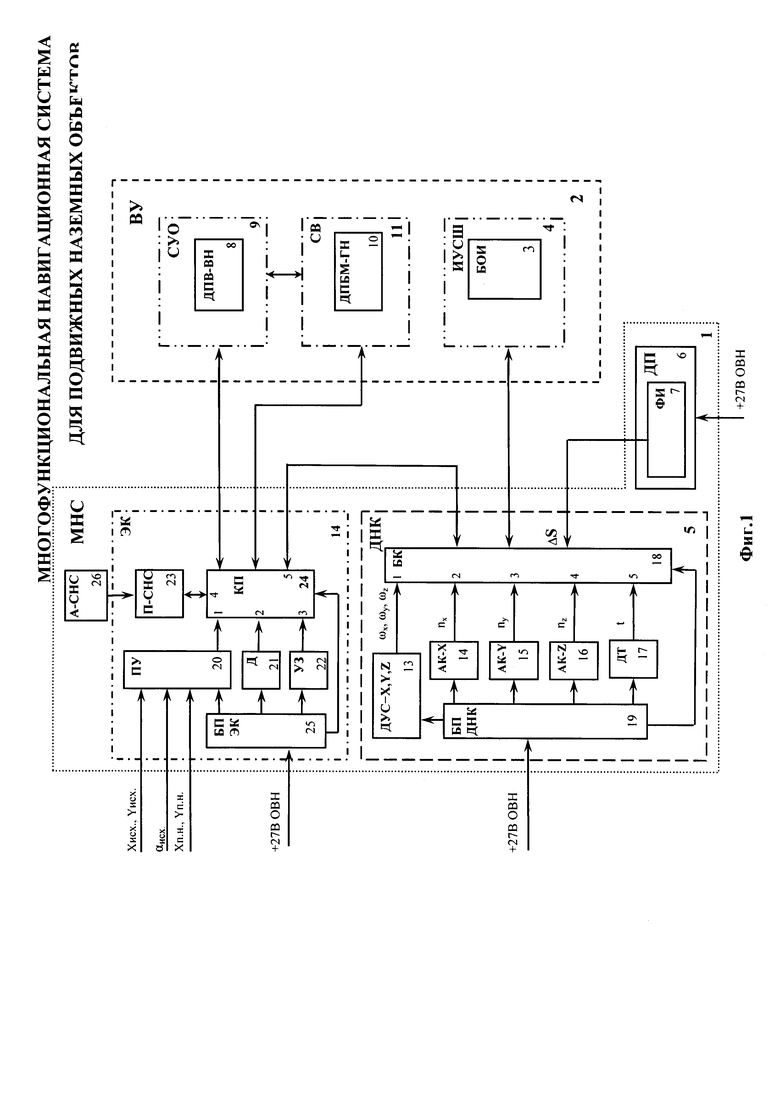
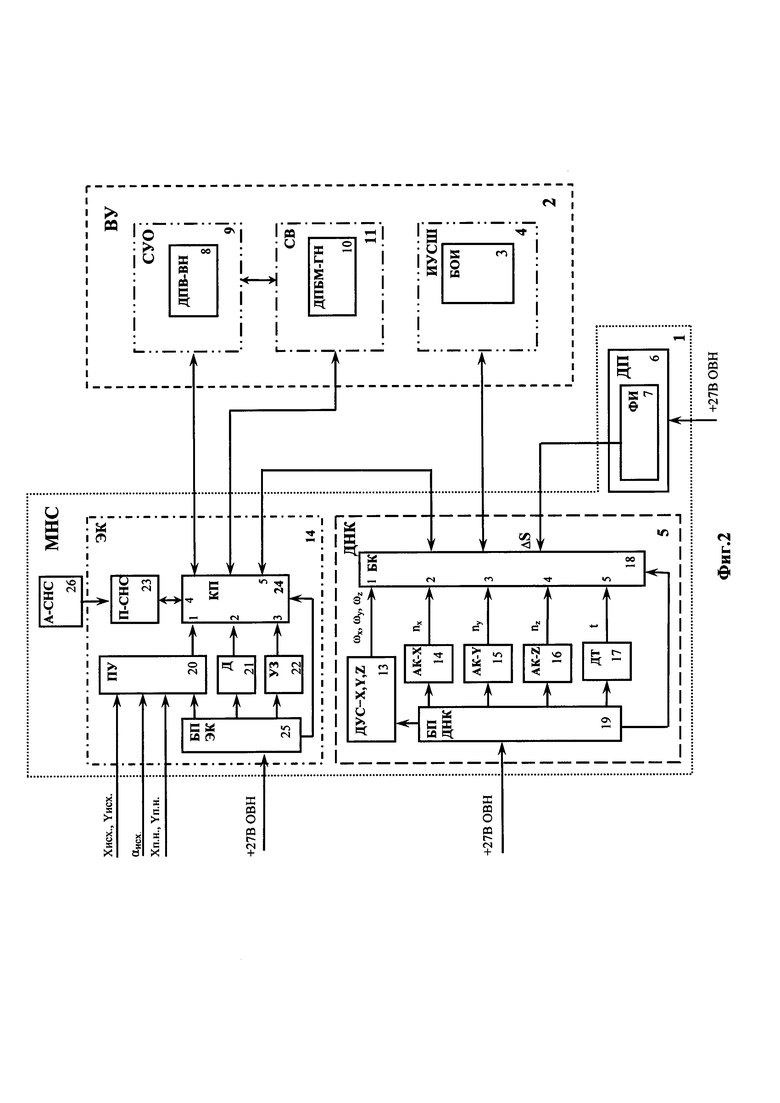
На Фиг. 1 приведена заявляемая структурная схема многофункциональной навигационной системы.
Сокращения, принятые в тексте и на Фиг. 1:
АК-X - акселерометр по оси X;
АК-Y - акселерометр по оси Y;
АК-Z - акселерометр по оси Z;
А-СНС - антенна спутниковой навигационной системы;
АЦПВТ - аналого-цифровой преобразователь сигнала вращающегося трансформатора;
БА - блок акселерометров;
БИНС - бесплатформенная инерциальная навигационная система;
БК - блок контроллеров;
БМ - боевой модуль ОВН;
БУ - блок управления;
БП ЭК - блок питания электронного картографа;
БП ДНК - блок питания датчик наклона и курса;
БОИ - блок отображения информации;
В - вооружение ОВН;
ВН - вертикальное наведение;
ВОГ - волоконно-оптический гироскоп;
ВУ - внешние устройства;
ГН - горизонтальное наведение;
ГКИ - гирокурсоизмеритель;
Д - дисплей;
ДНК - датчик наклона и курса;
ДУС-X, Y, Z - три отдельных датчика абсолютных угловых скоростей по трем ортогональным осям, размещенных конструктивно в едином корпусе;
ДПВ-ВН - датчик положения вооружения в плоскости ВН;
ДПБМ-ГН - датчик положения боевого модуля в плоскости ГН;
ДП - датчик пути;
ДТ - датчик температуры;
ИУСШ - информационно-управляющая система шасси;
КП - картографический процессор;
MB - механик-водитель ОВН;
МК - микроЭВМ;
МНС - многофункциональная навигационная система;
НКА - навигационные космические аппараты;
НС - навигационная система-прототип;
ОВН - объект военного назначения;
П - преобразователь (инвертор) постоянного напряжения +27 В бортсети ОВН в переменное напряжение 36 В 400 Гц;
ПН - пункт назначения;
ПУ - панель управления;
П-СНС - приемник спутниковой навигационной системы;
СВ - стабилизатор вооружения;
СУО - система управления огнем;
СНС - спутниковая навигационная система;
УЗ - устройство загрузки;
ФИ - формирователь импульсов датчика пути;
ЦУ - целеуказание;
ЭК - электронный картограф;
ΔS - путь, пройденный ОВН;
Хисх., Yисх. - начальные координаты ОВН;
αисх. - исходный дирекционный угол;
αз - ВН - текущее значение угла положения зеркала прицела в плоскости ВН;
αв - ВН - текущее значение угла положения вооружения (В) в плоскости ВН с ДПВ-ВН;
βз - ΓΗ - текущее значение угла положения зеркала прицела в плоскости ГН;
βБМ - ВН - текущее значение угла положения боевого модуля (БМ) в плоскости ГН с ДПБМ-ГН;
Хп.н., Υп.н. - координаты пункта назначения (цели);
nx, ny, nz - проекции вектора кажущегося ускорения шасси ОВН на оси, связанной с объектом системы координат;
t - значения температуры в градусах, формируемой датчиком температуры (ДТ);
ωx, ωy, ωz - проекции вектора абсолютной угловой скорости шасси ОВН на оси, связанной с объектом системы координат;
ψ - угол рыскания;
θ - угол тангажа;
γ - угол крена;
+27 В ОВН - постоянное напряжение бортовой сети ОВН.
Заявляемая МНС представляет собой конструктивно законченную автономную систему, обеспечивающую решение как собственных навигационных задач, так при необходимости и задач по расширению функциональных и эксплуатационных показателей ОВН в целом, что обеспечивается при комплексной работе МНС через информационные каналы взаимодействия (обмена) с тремя отдельными системами ОВН, а именно стабилизатором вооружения (СВ), системой управления огнем (СУО) и информационно-управляющей системой шасси (ИУСШ). Данная МНС также при наличии дополнительных требований может обеспечивать работу и с большим количеством систем ОВН при наличии в их конструкции соответствующих каналов информационного взаимодействия (обмена).
Составные части многофункциональной навигационной системы (МНС) 1 и связанные с ней по информационным каналам связи внешние устройства (ВУ) 2 в ОВН конструктивно расположены в шасси и обитаемом БМ с установленным вооружением, следующим образом:
а) В шасси ОВН установлены:
- на месте механика-водителя (MB) блок отображения информации (БОИ) 3 информационно-управляющей системой шасси (ИУСШ) 4 из состава внешних устройств (ВУ) 2;
- датчик наклона и курса (ДНК) 5 из состава многофункциональной навигационной системы (МНС) 1, жестко связанный с шасси и определенным, заданным образом сориентированный относительно системы координат ОВН с учетом собственных осей чувствительности по трем ортогональным осям Χ, Y, Z;
- датчик пути (ДП) 6 с формирователем импульсов (ФИ) 7 из состава многофункциональной навигационной системы (МНС) 1, механически связанный через собственный вал с ходовой частью шасси ОВН.
б) В БМ размещены:
- датчик положения вооружения в плоскости ВН (ДПВ-ВН) 8 системы управления огнем (СУО) 9 из состава внешних устройств (ВУ) 2. Вал датчика положения вооружения в плоскости ВН (ДПВ-ВН) 8 механически связан с осью вращения, установленного на БМ вооружения;
- датчик положения БМ в плоскости ГН (ДПБМ-ГН) 10 стабилизатора вооружения (СВ) 11 из состава внешних устройств (ВУ) 2. Вал датчика положения БМ в плоскости ГН (ДПБМ-ГН) 10 механически через редуктор связан в плоскости ГН с погоном БМ, жестко закрепленного на шасси ОВН;
- электронный картограф (ЭК) 12 из состава многофункциональной навигационной системы (МНС) 1, установленный на месте оператора (командира) ОВН.
Размещенная таким образом в БМ и шасси ОВН аппаратура многофункциональной навигационной системы (МНС) 1 и внешних устройств (ВУ) 2 при их совместном взаимодействии через цифровые информационные каналы обмена (типа CAN, RS422) позволяет обеспечить формирование полного набора необходимых для расчетов данных, сигналов и информации, обеспечивающих комплексное решение выше поставленных задач. Сами внешние устройства (ВУ) 2, электрически связанные через информационные каналы взаимодействия (обмена) с электронным картографом (ЭК) 12 и датчиком наклона и курса (ДНК) 5 представляют собой сигналы с комплекса приборов, датчиков и узлов, входящих как в систему управления огнем (СУО) 9, стабилизатор вооружения (СВ) 11, информационно-управляющую систему шасси (ИУСШ) 4, так и в оборудование ОВН в целом.
Ниже приведено описание основных принципов работы многофункциональной навигационной системы (МНС) 1, режимов ее работы и совместная ее работа с внешними устройствами (ВУ) 2 ОВН.
Многофункциональная навигационная система (МНС) 1 состоит из:
- датчика наклона и курса (ДНК) 5, внутри которого расположены три датчика абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Z) 13, акселерометр по оси X (АК-X) 14, акселерометр по оси Y (АК-Y) 15, акселерометр по оси Ζ (ΑК-Ζ) 16, датчик температуры (ДТ) 17, блок контроллеров (БК) 18 и блок питания датчика наклона и курса (БП ДНК) 19, электрически связанного с бортсетью +27 В ОВН.
Каждый из трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Z) 13 конструктивно выполнен на базе твердотельных волоконно-оптических гироскопов (далее по тексту - ВОГ), построенных по схеме кольцевого интерферометра Саньяка (эффект Саньяка) на основе кругового волоконно-оптического контура.
(См. 1) Распопов В.Я. Микромеханические приборы / М.: Машиностроение. - 2007. - 399 с.). Сам эффект Саньяка заключается в следующем - при расщеплении луча света в круговом волоконно-оптическом контуре на два отдельных луча, движущихся в противоположных направлениях по волоконно-оптическому контуру одинаковой длины и нахождении при этом корпуса ВОГ в покое относительно инерционного пространства оба луча света при сложении в расщепителе ВОГ не вызывают между собой фазового сдвига. Однако когда ВОГ вращается в инерциальном пространстве, то между лучами света на расщепителе ВОГ возникает разность фаз, пропорциональная угловой скорости его вращения.
Блок питания датчика наклона и курса (БП ДНК) 19 использован для формирования вторичных напряжений, необходимых для питания трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Z) 13, акселерометра по оси X (АК-X) 14, акселерометра по оси Y (АК-Y) 15, акселерометра по оси Z (АК-Z) 16, датчика температуры (ДТ) 17 и блока контроллеров (БК) 18;
- электронного картографа (ЭК) 12, на лицевой панели и в корпусе которого соответственно установлены панель управления (ПУ) 20, дисплей (Д) 21, устройство загрузки (УЗ) 22, приемник спутниковой навигационной системы (П-СНС) 23, картографический процессор (КП) 24 и блок питания электронного картографа (БП ЭК) 25, электрически связанного с бортсетью +27 В ОВН.
Блок питания электронного картографа (БП ЭК) 25 использован для формирования вторичных напряжений, необходимых для питания панели управления (ПУ) 20, дисплея (Д) 21, устройства загрузки (УЗ) 22 и картографического процессора (КП) 24;
- антенны спутниковой навигационной системы (А-СНС) 26, механически закрепленной на внешней поверхности БМ и электрически связанной с приемником спутниковой навигационной системы (П-СНС) 23;
- датчика пути (ДП) 6 с формирователем импульсов (ФИ) 7, связанного электрически с бортсетью +27 В ОВН и механически, через собственный вал, с ходовой частью (трансмиссией) шасси ОВН.
Многофункциональная навигационная система работает следующим образом.
Датчик пути (ДП) 6 с формирователем импульсов (ФИ) 7 и внутренние чувствительные элементы датчика наклона и курса (ДНК) 5, такие как три датчика абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Z) 13, акселерометр по оси X (АК-X) 14, акселерометр по оси Y (АК-Y) 15, акселерометр по оси Ζ (ΑК-Ζ) 16, датчик температуры (ДТ) 17, формируют на входах блока контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 информацию, необходимую для определения по заданному в нем алгоритму углов ориентации шасси ОВН и выработки координат его местоположения и скорости движения, а именно:
- информацию о пройденном пути шасси ОВН, вычисляемой по сигналам импульсов прямоугольной формы вырабатываемым формирователем импульсов (ФИ) 7, частота следований которых задает скорость движения шасси ОВН, а порядок их чередования, с учетом их фазового сдвига относительно друг друга, определяет направления движения шасси ОВН (взад/вперед);
- информацию по абсолютным угловым скоростям (ωx, ωy, ωz) шасси ОВН на оси угловых скоростей шасси ОВН;
- информацию по абсолютным кажущимся ускорениям (nx, ny, nz) шасси ОВН на оси, связанной с объектом системы координат, образуя, тем самым, ортогональную систему измерений кажущегося линейного ускорения шасси ОВН по двум горизонтальным и вертикальному каналу (Χ, Υ, Ζ);
- текущее значение температуры датчика наклона и курса (ДНК), используемого для алгоритмической компенсации блоком контроллеров (БК) 18 температурных погрешностей трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Ζ) 13, акселерометра по оси X (АК-Х) 14, акселерометра по оси Y (АК-Y) 15 и акселерометра по оси Ζ (АК-Ζ) 16.
Приемник спутниковой навигационной системы (П-СНС) 23 по сигналам, получаемым от антенны спутниковой навигационной системы (А-СНС) 26, как и в случае НС-прототипа, формирует на одном из входов картографического процессора (КП) 24 информацию от активных навигационных космических аппаратов (НКА), используемую для расчета координат ОВН по псевдодальностям до них (НКА).
Взаимодействие и передача полученной в ходе вычислений информации между блоком контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 и картографическим процессором (КП) 24 электронного картографа (ЭК) 12 осуществляется через цифровой информационный канал обмена (типа CAN, RS422).
При работе многофункциональной навигационной системы (МНС) 1 с внешними устройствами (ВУ) 2 полученная в ходе вычислений картографическим процессором (КП) 24 электронного картографа (ЭК) 12 и блоком контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 текущая картографическая и навигационная информация о месте положения и направлении движения шасси ОВН (по запросу от MB или указанию командира ОВН) выводится (дублируется) через блок контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 на дисплей блока отображения информации (БОИ) 3 информационно-управляющей системой шасси (ИУСШ) 4. Это обеспечивается за счет наличия цифрового информационного канала обмена (типа CAN, RS422) между блоком контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 и блоком отображения информации (БОИ) 3 информационно-управляющей системой шасси (ИУСШ) 4.
Одновременно также сигналы с внешних устройств (ВУ) 2, поступающие через цифровые информационные каналы обмена (типа CAN, RS422) на входы картографического процессора (КП) 24 электронного картографа (ЭК) 12, такие как сигнал датчика положения вооружения в плоскости ВН (ДПВ-ВН) 8 системы управления огнем (СУО) 9, сигнал датчика положения БМ в плоскости ГН (ДПБМ-ГН) 10 стабилизатора вооружения (СВ) 11 и дополнительные внутренние сигналы от системы управления огнем (СУО) 9, формируют на входах картографического процессора (КП) 24 соответствующие сигналы, необходимые для реализации алгоритма стрельбы из установленного на ОВН вооружения с закрытых позиций по ненаблюдаемой цели, а именно:
- сигнал по относительному положению установленного вооружения в плоскости ВН (αв - ВН);
- сигнал по относительному положению боевого модуля в плоскости ΓΗ (βБМ - ΒΗ)) относительно шасси ОВН;
- сигналы по углам крена γ и тангажа θ боевого модуля относительно шасси ОВН, формируемых датчиком крена и тангажа СУО;
- сигналы по положению независимо стабилизированной в плоскостях ВН и ГН линии визирования активного прицела (αз - ВН и βз - ГН), используемых для управления наведением и стабилизации в плоскостях ВН и ГН установленного на ОВН вооружения через силовые приводы ВН и ГН стабилизатора вооружения (СВ) 11.
Сформированные, таким образом, на входах многофункциональной навигационной системы (МНС) 1 и связанных с ней по информационным каналам связи внешних устройств (ВУ) 2 сигналы позволяют реализовать ее работу в двух основных режимах:
1. НАВИГАЦИОННОМ РЕЖИМЕ - основной режим работы, включающий следующие подрежимы:
1.1 АВТОНОМНЫЙ - автономное определение координат местоположения ОВН по информации, получаемой от датчика наклона и курса (ДНК) 5 и датчика пути (ДП) 6 с формирователем импульсов (ФИ) 7;
1.2 СПУТНИКОВЫЙ - обеспечивает определение координат местоположения ОВН по сигналам спутниковых навигационных систем, получаемых от антенны спутниковой навигационной системы (А-СНС) 26 через приемник спутниковой навигационной системы (П-СНС) 23;
1.3 ИНТЕГРИРОВАННЫЙ - обеспечивает определение координат местоположения ОВН по информации, получаемой в АВТОНОМНОМ режиме многофункциональной навигационной системы (МНС) 1 с последующей коррекцией координат местоположения ОВН по информации от спутниковой навигационной системы в СПУТНИКОВОМ режиме работы.
2. КОМПЛЕКСНОМ РЕЖИМЕ - вспомогательный (дополнительный) режим работы с внешними устройствами (ВУ) 2, включающий следующие подрежимы:
2.1 СТРЕЛЬБЫ С ЗАКРЫТЫХ ПОЗИЦИЙ;
2.2 НАВИГАЦИИ С МЕСТА МЕХАНИКА-ВОДИТЕЛЯ (MB);
2.3 НАСТРОЙКИ СТАБИЛИЗАТОРА ВООРУЖЕНИЯ (СТВ);
2.4 ДИАГНОСТИКА.
1.1 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме АВТОНОМНЫЙ
В данном подрежиме работы решение навигационной задачи многофункциональной навигационной системой (МНС) 1 осуществляется только за счет использования собственных автономных средств (датчиков), а именно на основании обработки блоком контроллеров (БК) 18 значений сигналов, получаемых от трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Z) 13, от акселерометра по оси X (АК-X) 14, от акселерометра по оси Y (АК-Y) 15, от акселерометра по оси Z (АК-Z) 16 и от датчика пути (ДП) 6. Указанные чувствительные элементы жестко закреплены внутри корпуса датчика наклона и курса (ДНК) 5 так, чтобы их оси чувствительности конструктивно были сориентированы вдоль осей Χ, Υ, Ζ прямоугольной системы координат, связанной с собственным корпусом датчика наклона и курса (ДНК) 5.
По сути указанные выше три датчика абсолютных угловых скоростей позволяют путем последовательных математических преобразований интегрирований определить параметры углового движения шасси ОВН (ориентации в конечном счете), а три акселерометра дают возможность определить параметры поступательного движения (скорости и координаты местоположения) шасси ОВН.
Таким образом, датчик наклона и курса (ДНК) 5, установленный в шасси подвижного ОВН и имеющий в своем составе указанные чувствительные элементы, позволяет вести ОВН к заданной цели (пункту назначения), используя для этого исключительно известные законы движения Ньютона, действующие в инерциальном пространстве.
(См. 2) Богданов М.Б., Прохорцов А.В., Савельев В.В., Сухинин Б.В., Гаськова Н.Д. Способ уменьшения погрешностей бесплатформенной инерциальной навигационной системы // Известия Российской Академии ракетных и артиллерийских наук. Вып. 2 (60). Москва - Санкт-Петербург: Российская Академия ракетных и артиллерийских наук, 2009 г.);
3) Панов А.П. Математические основы теории инерциальной ориентации. - Киев: Наукова думка, 1995. 280 с.).
Предлагаемая МНС, в данном режиме работы, по структуре построения относится к классу бесплатформенных инерциальных навигационных систем (БИНС), в которых плоскость горизонта реализована математически, с использованием блоком контроллеров (БК) 18 абсолютных данных от вышеуказанных датчиков угловых скоростей и ускорений и обработкой их по специальному алгоритму ориентации. Выходом БИНС являются географические координаты местоположения шасси ОВН, проекции скорости относительно Земли, скорость его движения и углы его ориентации.
(См. 4) Бранец В.Н., Шмыглевский И.П. Введение в теорию бесплатформенных инерциальных навигационных систем. М.: Наука, 1992. 280 с.).
Информация с трех датчиков абсолютных угловых скоростей по трем ортогональным осям (ДУС-X, Y, Z) 13 в виде проекций вектора абсолютной угловой скорости ωс (полученного как результат обработки абсолютных угловых скоростей ωx, ωy, ωz) на связанные с шасси ОВН оси подается в алгоритм ориентации блока контроллеров (БК) 18.
(См. 5) Селиванова Л.М. Инерциальные навигационные системы: учеб. пособие. - Ч. 1: Одноканальные инерциальные навигационные системы / Л.М. Селиванова, Е.В. Шевцова. - М.: Изд-во МГТУ им. Н.Э. Баумана, 2012. - 46 с.: ил.).
Алгоритм ориентации, реализованный в программе, записанной в блок контроллеров (БК) 18 датчика наклона и курса (ДНК) 5, построен на решении кинематических уравнений, записанных относительно искомых параметров ориентации. В качестве параметров ориентации использованы кватернионы, направляющие косинусы (могут быть использованы также углы Эйлера-Крылова, направляющие косинусы, кватернионы, формула Пуассона), которые в результате пересчитываются блоком контроллеров (БК) 18 в традиционные углы рыскания ψ (вычисляется относительно текущего дирекционного угла α), тангажа θ и крена γ.
Алгоритм ориентации блока контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 также формирует матрицу C(t) направляющих косинусов перехода, с помощью которой осуществляет пересчет информации из связанной системы координат в горизонтную (географическую). Для определения матрицы перехода C(t) алгоритм ориентации блока контроллеров (БК) 18 использует информацию об абсолютной угловой скорости горизонтного трехгранника ωg. Информация с трех акселерометров в виде проекций вектора кажущегося ускорения nc на оси связанной системы координат поступают, как было описано выше, в блок контроллеров (БК) 18, с помощью которого осуществляется проектирование проекций кажущегося ускорения nc, измеренных акселерометрами, на оси горизонтной системы координат ng.
Кажущиеся ускорения nx, ny, nz, измеряемые акселерометрами представляют собой ускорения, которые имела бы материальная точка под действием негравитационных сил, если бы она могла двигаться в пространстве, свободном от действия сил тяготения Земли.
Вычисленная блоком контроллеров (БК) 18 информация о проекциях кажущегося ускорения nc на оси горизонтной системы координат поступает также в его навигационный алгоритм и алгоритм ориентации, где происходит вычисление координат местоположения объекта Χ, Υ, Ζ и скорости движения шасси ОВН. Здесь же определяется абсолютная угловая скорость ωg горизонтной системы координат, поступающая также в алгоритм ориентации блока контроллеров (БК) 18.
Таким образом, блок контроллеров (БК) 18, работая по навигационному алгоритму и алгоритму ориентации, обеспечивает, с учетом исходного углового положения, вычисление приращений углов поворота шасси ОВН путем интегрирования математических преобразований абсолютной угловой скорости ωg. горизонтной системы координат. Также блок контроллеров (БК) 18, имея значение вычисленной скорости движения шасси ОВН, получая информацию о пройденном пути (относительной скорости) от датчика пути (ДП) 6 с формирователем импульсов (ФИ) 7 и рассчитывая автономно дирекционный угол αисх шасси ОВН, производит преобразование приращений пути в приращения координат с последующим суммированием приращений с исходными координатами.
Используемые чувствительные элементы датчика наклона и курса (ДНК) 5, навигационный алгоритм с алгоритмом ориентации, реализованные программно в блоке контроллеров (БК) 18 по сравнению с НС-прототипом, позволяют автономно определить углы ориентации шасси ОВН в режиме начального ориентирования, не привлекая информацию от других внешних навигационных систем (магнитометров, систем спутниковой навигации и др.). Полученная навигационная информация позволяет на текущей электронной карте местности в графическом виде отобразить текущий дирекционный угол ОВН и угол на пункт назначения.
Одновременно блок контроллеров (БК) 18 датчика наклона и курса (ДНК) 5, вычисляя текущие навигационные параметры шасси ОВН, обеспечивает:
- информационный обмен с электронным картографом (ЭК) 14 для отображения на его собственном дисплее (Д) 21 текущего положения шасси ОВН на электронной карте местности, загруженной через устройство загрузки (УЗ) 22.
- информационный обмен с информационно-управляющей системой шасси (ИУСШ) 4 для отображения на дисплее ее блока отображения информации (БОИ) 3 текущего положения шасси ОВН на электронной карте местности, транслируемой с электронного картографа (ЭК) 14. Текущая электронная карта местности, как и в случае с электронным картографом (ЭК) 14, предварительно загружается в память блока отображения информации (БОИ) 3 информационно-управляющей системой шасси (ИУСШ) 4.
1.2 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме СПУТНИКОВЫЙ
Как и в случае с НС-прототипом в режиме спутниковой навигации, определение координат ОВН обеспечивает приемник спутниковой навигационной системы (П-СНС) 23, обрабатывая сигналы, получаемые от антенны спутниковой навигационной системы (А-СНС) 26, и передавая их в картографический процессор (КП) 24.
Координаты ОВН рассчитываются по псевдодальностям до НКА. Псевдодальности рассчитываются по временным задержкам Ti «i-й НКА-потребитель» и известной скорости распространения радиоволн с, в соответствии с формулой (6).
Ti - измеряются в результате сопоставления принятых псевдослучайных кодов и генерируемых в приемнике спутниковой навигационной системы (П-СНС) 23 копий этих кодов с учетом априори известных моментов излучений сигналов НКА. При этом используются также соответствующие измерения разностей фаз несущих частот.
(См. 6) ГОСТ Ρ 51794-2008. Глобальные навигационные спутниковые системы. Системы координат. Методы преобразования координат определяемых точек. М.: Стандартинформ, 2009. 19 с.).
Определенные таким образом псевдодальности Diu прописаны в алгоритме ориентации картографического процессора (КП) 24 в следующем в виде:

где X, Y, Z - прямоугольные координаты ОВН, в геоцентрической системе координат;
Xi, Yi, Zi - такие же координаты i-го НКА, определяемых из навигационного сообщения;
Т′- расхождение шкал времени НКА и электронного картографа (ЭК) 14;
с - скорость распространения радиоволн;
δDi - погрешности определения псевдодальностей;
i=1, 2, …, N и N - число НКА, по сигналам которых определены псевдодальности.
Для решения задачи определения места положения ОВН и коррекции временной шкалы используется система уравнений, неизвестными параметрами которой являются три координаты X, Y, Z и ошибка шкалы времени потребителя Т′, проявляющаяся при априорном определении момента излучения сигнала НКА.

где N - число НКА.
Учитывая, что неизвестных параметров в формуле (8) оказывается четыре, необходимо иметь не менее четырех определений псевдодальностей относительно четырех активных (видимых) НКА. Количество орбитальных спутников навигационных систем ГЛОНАС и NAVSTAR (GPS) и их расположение вокруг Земли обеспечивает, чтобы в зоне видимости антенны спутниковой навигационной системы (А-СНС) 26 ОВН (потребителя), находилось от пяти до восьми НКА.
Найденные в ходе навигационных определений прямоугольные геоцентрические координаты Χ, Υ, Ζ преобразуются в картографическом процессоре (КП) 24 приемником спутниковой навигационной системы (П-СНС) 23 в координаты Гаусса-Крюгера и передаются в картографический процессор (КП) 24 для отображения местоположения ОВН на фоне загруженной через устройство загрузки (УЗ) 22 текущей электронной карты местности, выводимой на дисплей (Д) 21 электронного картографа (ЭК) 14 на фоне загруженной через устройство загрузки (УЗ) 22 текущей электронной карты местности.
Электронная карта местности, используемая для отображения текущего местоположения ОВН, целей, пунктов назначения, контрольных точек и тактической обстановки в реальном масштабе времени, позволяет определять угол возвышения целей или их точные координаты, используя матрицу высот электронной карты. На электронной карте также в графическом виде отображаются текущий дирекционный угол ОВН и угол на пункт назначения.
Одновременно блок контроллеров (БК) 18 датчика наклона и курса (ДНК) 5, получая по информационному каналу взаимодействия от картографического процессора (КП) 24 текущее положение ОВН на электронной карте местности, транслирует эти данные на дисплей блока отображения информации (БОИ) 3 информационно-управляющей системы шасси (ИУСШ) 4.
1.3 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме ИНТЕГРИРОВАННЫЙ
Работа в данном подрежиме аналогична работе и возможностям НС-прототипа в интегрированном режиме навигации.
В данном подрежиме на соответствующие входы картографического процессора (КП) 24 поступает одновременно информация и с выхода приемника спутниковой навигационной системы (П-СНС) 23 и с выхода блока контроллеров (БК) 18 датчика наклона и курса (ДНК) 5.
При работе в интегрированном режиме дополнительно учитывается разница траекторий точки качения колес (гусениц) ОВН и движения антенны спутниковой навигационной системы (А-СНС) 26. Антенна спутниковой навигационной системы (А-СНС) 26 кроме поступательного движения участвует в колебательном движении ОВН, и ее траектория зависит от высоты ее установки над уровнем Земли. Поэтому в данном режиме работы для точной коррекции данных о пройденном пути дополнительно производится оценка приращения географических координат по датчику пути (ДП) 6 с формирователем импульсов (ФИ) 7 и их сравнение с информацией от СНС. Полученная оценка используется для коррекции информации от датчика пути (ДП) 6 с формирователем импульсов (ФИ) 7 в реальном масштабе времени.
Полученная таким образом картографическим процессором (КП) 24 электронного картографа (ЭК) 1 навигационная информация при ее совместной (интегрированной) обработке позволяет обеспечить получение более высокой точности определения координат ОВН, по сравнению с автономным режимом, что достигается повышением точности коррекции координат ОВН по информации от СНС.
2.1 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме СТРЕЛЬБА С ЗАКРЫТЫХ ПОЗИЦИЙ
Режим обеспечивает стрельбу с закрытых позиций по ненаблюдаемой цели из установленного на ОВН вооружения по координатам внешнего ЦУ. Ввод координат ненаблюдаемой цели при внешнем ЦУ осуществляется либо в автоматическом режиме, либо в ручном режиме.
В автоматическом режиме работы информация о координатах ненаблюдаемой цели (координаты ЦУ) получается внешними устройствами (ВУ) 2 от цифровой радиостанции, штатно установленной на ОВН. Полученные координаты ненаблюдаемой цели по каналу информационного взаимодействия (типа CAN, RS422) передаются в картографический процессор (КП) 24.
В ручном режиме работы заранее известные координаты (координаты ЦУ) ненаблюдаемой цели вводятся оператором (командиром) ОВН при помощи панели управления (ПУ) 20 (клавиатуры) и меню электронного картографа (ЭК) 12, выводимого на его дисплей (Д) 21. Введенные координаты ненаблюдаемой цели передаются в картографический процессор (КП) 24.
В свою очередь картографический процессор (КП) 24 электронного картографа (ЭК) 12 в ходе обработки комплексной информации, полученной:
- от приемника спутниковой навигационной системы (П-СНС) 23 и (или) от блока контроллеров (БК) 18 датчика наклона и курса (ДНК) 5 в части определения текущих координат шасси ОВН;
- от внешних устройств (ВУ) 2 в части получения в автоматическом режиме по радиоканалу при внешнем ЦУ информации о координатах цели или вводимых оператором (командиром) в ручном режиме уже известных координат цели с панели управления (ПУ) 20 электронного картографа (ЭК) 12;
- от внешних устройств (ВУ) 2 в части получения от датчика крена и тангажа системы управления огнем (СУО) 9 текущих значений углов крена и тангажа БМ с установленным вооружением;
- от датчиков относительного положения, как было сказано выше, определяющим истинное текущее положение вооружения по ВН и ГН относительно БМ и шасси ОВН,
формирует на входе системы управления огнем (СУО) 9 стрельбовую информацию о необходимых углах поворота (доворота) по ВН и ГН, установленного на ОВН вооружения, а также расчетные данные о дальности до ненаблюдаемой цели, необходимой к поражению.
Система управления огнем (СУО) 9, имея указанную выше информацию, совместно со стабилизатором вооружения (СВ) 11 поворачивает установленное вооружение на полученные расчетные углы с учетом баллистических угловых поправок по ВН и ГН (на дальность до цели, на условия стрельбы, тип выбранной баллистики - боеприпаса). Далее по появлению сигнала готовности к стрельбе и нажатию оператором кнопки стрельбы на пульте управления системы управления огнем (СУО) 9 производится выстрел из установленного на ОВН вооружения по ненаблюдаемой цели.
2.2 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме НАВИГАЦИИ С МЕСТА МЕХАНИКА-ВОДИТЕЛЯ (MB)
Данный режим работы позволяет обеспечить полноценный режим навигации с места MB по текущей карте местности, выводимой на дисплей блока отображения информации (БОИ) 3 информационно-управляющей системы шасси (ИУСШ) 4, установленного непосредственно на рабочем месте MB. При этом также обеспечивается возможность, в случае необходимости, указания оператором (командиром) ОВН MB требуемого направления движения по текущей карте местности шасси ОВН к пункту назначения, выводимой также на дисплей блока отображения информации (БОИ) 3.
2.3 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме НАСТРОЙКИ СТАБИЛИЗАТОРА ВООРУЖЕНИЯ (СВ)
Режим обеспечивает возможность оператору (командиру) ОВН, в случае необходимости, оперативно проводить настройку стабилизатора вооружения (СВ) 11 при помощи панели управления (ПУ) 20 и меню электронного картографа (ЭК) 12, выводимого на его дисплей (Д) 21 без использования дополнительной внешней подключаемой аппаратуры.
2.4 Работа многофункциональной навигационной системы (МНС) 1 в подрежиме ДИАГНОСТИКИ
Режим обеспечивает возможности оператору (командиру) ОВН оперативно проводить диагностику системы управления огнем (СУО) 9, стабилизатора вооружения (СВ) 11 и информационно-управляющей системой шасси (ИУСШ) 4 при помощи панели управления (ПУ) 20 и меню электронного картографа (ЭК) 12 без использования дополнительно подключаемого внешнего оборудования.
Часть элементов многофункциональной навигационной системы (МНС) 1 удобнее реализовать как часть программного обеспечения, реализованного как в блоке контроллеров (БК) 18 датчика наклона и курса (ДНК) 5, так и в картографическом процессоре (КП) 24 электронного картографа (ЭК) 14.
При этом обработка получаемых картографическим процессором (КП) 24 и блоком контроллеров (БК) 18 данных будет осуществляться отдельными контроллерами (типа 1986 ВЕ92У), состоящим из модулей:
- аналого-цифрового преобразователя;
- цифро-аналогового преобразователя;
- дискретного ввода - вывода;
- информационных каналов обмена, являющихся физическими портами картографического процессора (КП) 24 и блока контроллеров (БК) 18 и при необходимости дополненных отдельными приемопередатчиками соответствующего интерфейса обмена (типа CAN, RS422).
Частота обработки полученных картографическим процессором (КП) 24 и блоком контроллеров (БК) 18 данных внутри многофункциональной навигационной системы (МНС) 1 и выдача ими полученной информации в связанные с ними электрически приборы и устройства будет определяться заданной частотой циклов обработки данных их основными контроллерами.
Частота обмена многофункциональной навигационной системы (МНС) 1 по последовательным шинам (типа CAN, RS422) с внешними устройствами (ВУ) 2 будет определяться установленной программно стандартной частотой обмена на используемой цифровой шине.
(См. 7) Третьяков С.А. «CAN - локальная сеть контроллеров» "Электроника", Минск, 1998. №9 и №10;
8) Грибанов М.В., Калачев Д.П., Третьяков С.А. «CAL - CAN протокол прикладного уровня для индустриальных приложений» - МКА, №4, 1999).
Таким образом, поставленные в заявке технические задачи достигнуты.
Предлагаемая изобретением многофункциональная навигационная система, реализованная на современной аналоговой и цифровой элементной базе, позволяет обеспечить формирование всей номенклатуры навигационных параметров как в автономном режиме, т.е. позволяет отнести предлагаемую систему к инерциальным (одометрическим) навигационным системам, так и при работе по сигналам спутниковых навигационных систем (ГЛОНАС, NAVSTAR (GPS)).
Одновременно предлагаемое изобретение позволяет реализовать в комплексе с другими системами ОВН выполнение (при необходимости) дополнительных функций, которые с одной стороны позволяют расширить возможности боевого управления ОВН, в том числе обеспечить возможность стрельбы из установленного на ОВН вооружения с закрытых позиций по сигналам внешнего целеуказания, с другой стороны, обеспечить при эксплуатации настройку, контроль и диагностику систем ОВН, связанных между собой и предлагаемой изобретением навигационной системой по цифровым информационным каналам связи (обмена).
Т.о., изобретение позволяет за счет организации новой структуры построения навигационной системы и применения новых приборов и датчиков, построенных на цифровой платформе, значительно расширить совместно с системой управления огнем возможности боевого применения ОВН, поднять его боевую мощь, надежность, живучесть, улучшить его технические и эксплутационные характеристики, что очень важно при работе экипажа в реальных боевых условиях.
Приведенные в описании технические преимущества, целесообразность и надежность многофункциональной навигационной системы, реализованной по заявляемой структурной схеме, подтверждены испытаниями опытного образца МНС на модернизированном объекте Т-72Б1 на испытательной базе ОАО «61БТРЗ» г. Санкт-Петербург, в/ч 02511 пос. Каменка, в/ч 71717 г. Сертолово Ленинградской области.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СИСТЕМА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2548941C1 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2015 |
|
RU2593931C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2551626C1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМОГО БОЕВОГО МОДУЛЯ | 2016 |
|
RU2629732C1 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697859C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
Изобретение относится к области навигационного приборостроения, а именно к навигационным системам, используемым для определения основных навигационных параметров позиционирования наземных объектов. Изобретение может быть использовано при создании и изготовлении современных систем для ориентации, навигации, наведения и прицеливания вооружения объектов военного назначения (далее по тексту - ОВН) и устройств наземной техники. Для этого к известной системе навигации (СН), содержащей датчик пути (ДП) с формирователем импульсов (ФИ), электронный картограф (ЭК) с картографическим процессором (КП), электрически связанный с внешними устройствами (ВУ) ОВН информационными каналами связи, дисплеем (Д), панелью управления (ПУ), устройством загрузки (УЗ), приемником спутниковой системы (П-СНС), картографический процессор (КП), блок питания электронного картографа (БП ЭК), антенну спутниковой навигационной системы (А-СНС), дополнительно введен с соответствующими связями датчик наклона и курса, включающий в себя: блок питания датчика наклона и курса (БП ДНК), три датчика абсолютных угловых скоростей (ДУС-X, Y, Z) по трем ортогональным осям, три акселерометра по трем ортогональным осям (АК-X, АК-Y, АК-Z), датчик температуры (ДТ), блок контроллеров (БК). Технический результат - расширение эксплуатационных и функциональных возможностей как самой навигационной системы, так и объекта ее применения. 1 з.п. ф-лы, 2 ил.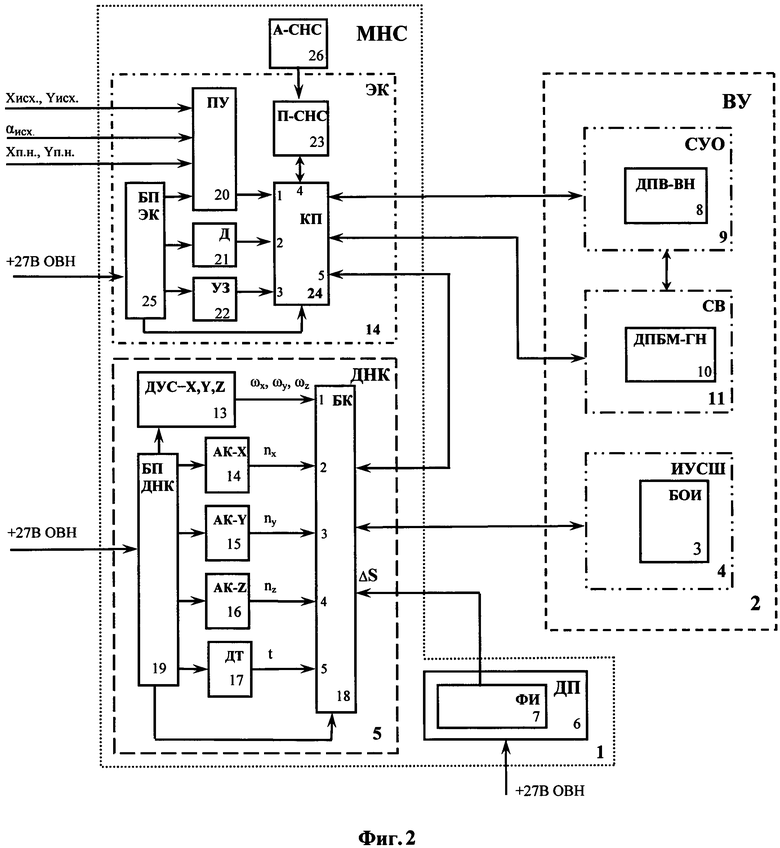
1. Многофункциональная навигационная система, содержащая датчик пути с формирователем импульсов, электронный картограф с картографическим процессором, электрически связанный с внешними устройствами ОВН информационными каналами связи, дисплеем, панелью управления, устройством загрузки, приемником спутниковой системы, выходы которых электрически связаны соответственно с первым, вторым, третьим и четвертым входами картографического процессора, блок питания электронного картографа, вход которого электрически соединен с бортсетью +27В ОВН, а выходы соединены с соответствующими входами картографического процессора, дисплея, панели управления и устройства загрузки, антенну спутниковой навигационной системы, электрически связанную с приемником спутниковой навигационной системы, отличающаяся тем, что в нее дополнительно введен датчик наклона и курса, включающий в себя блок питания датчика наклона и курса, три датчика абсолютных угловых скоростей по трем ортогональным осям, три акселерометра по трем ортогональным осям, датчик температуры, блок контроллеров, причем чувствительные элементы трех датчиков абсолютных угловых скоростей и трех акселерометров жестко связаны через корпус датчика наклона и курса с корпусом шасси ОВН, а вход блока питания датчика наклона с одной стороны электрически связан с бортсетью +27В ОВН, с другой стороны - с соответствующими входами трех датчиков абсолютных угловых скоростей, входами трех акселерометров, датчика температуры и блока контроллеров, а выходы трех датчиков абсолютных угловых скоростей по трем ортогональным осям, выходы трех акселерометров по трем ортогональным осям и датчика температуры электрически связаны соответственно с первым, вторым, третьим, четвертым и пятым входами блока контроллеров, который, в свою очередь, электрически связан с картографическим процессором электронного картографа, датчиком пути с формирователем импульсов электрически связанного с бортсетью +27В ОВН картографическим процессором электронного картографа, датчиком пути с формирователем импульсов электрически связанного с бортсетью +27В ОВН и с входом/выходом внешнего(их) устройств(а) ОВН с информационным каналом связи, например с информационно-управляющей системой шасси ОВН с блоком отображения информации,
при этом картографический процессор электронного картографа, в свою очередь, электрически связан с входом/выходом внешних устройств ОВН по информационным каналам связи, например с системой управления огнем ОВН с датчиком положения вооружения в плоскости ВН и стабилизатором вооружения ОВН с датчиком положения боевого модуля в плоскости ГН,
причем стабилизатор вооружения ОВН с датчиком положения боевого модуля в плоскости ГН, в свою очередь, электрически связан с системой управления огнем (СУО) ОВН с датчиком положения вооружения в плоскости ВН (ДПВ-ВН).
2. Многофункциональная навигационная система по п. 1, отличающаяся тем, что в ней датчики абсолютной угловой скорости выполнены на базе твердотельных оптико-волоконных гироскопов.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2087867C1 |
| Прибор для определения угла установки отклонителя в скважине | 1957 |
|
SU109553A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |

