Изобретение относится к области оптико-электронного приборостроения, а точнее к системам, в которых человек-оператор взаимодействует с техническими средствами, служащими для выдачи угловых координат линии визирования оператора, фиксируемой с помощью оптико-электронных устройств, сигналы с которых обеспечивают автоматическое наведение оружия, например, тепловой головки самонаведения на цель, независимо от вектора скорости самолета.
Известны системы нашлемного целеуказания (1-3), содержащие систему индикации, излучатели, угломерную систему, включающую оптическую часть и фотоприемники и электронный блок обработки сигналов. Во всех устройствах система индикации вводит в поле зрения оператора изображение прицельной марки и иные символы, необходимые для работы оператора. На шлеме закреплены группы излучателей (светоизлучающих диодов), которые оптически сопряжены с угломерной системой, выдающей информацию в электронный блок, определяющий направление линии визирования оператора методом триангуляции, например, как в источниках (4, 5).
В этих устройствах измерение положения линии визирования осуществляется угломерной системой, состоящей из двух оптико-локационных блоков (ОЛБ). Измерение осуществляют по группе излучающих диодов, сопряженных с соответствующим ОЛБ, что увеличивает количество излучателей на шлеме и снижает точность измерений, т. к. в этом случае на ошибки измерений прямо влияют все погрешности объектива (геометрические и аберрационные). Использование двух раздельных ОЛБ, не объединенных общей конструкцией, приводит к необходимости проведения очень точных юстировок их взаимного расположения на объекте применения НСЦ для согласования осей координат и определения базы между ними. Все это усложняет установку, эксплуатацию и приводит к потере точности за счет нежесткости объекта. Кроме того, при значительном поле зрения объектива, выделение изображений нашлемных излучателей на фоне помех является очень сложной задачей, в решении которой неизбежны значительные ограничения по условиям применения.
Наиболее близким по технической сущности и достигаемому результату является устройство, описанное в источнике (6). Нашлемная система целеуказания содержит систему индикации (нашлемный коллиматорный визир, фиксирующий положение цели линией визирования), группу излучателей, образующих реперный узел, расположенных на шлеме, два ОЛБ, оптически сопряженных с соответствующей группой излучателей.
Каждый ОЛБ, установленный в кабине оператора, содержит объектив с V-образной щелевой диафрагмой и линейку фоточувствительных элементов приемника, а также электронный блок, включающий вычислитель. Оператор следит взглядом за целью, поворотом головы совмещая прицельную марку с выбранной целью. Угловое перемещение излучателей, закрепленных на голове оператора, измеряется, результаты измерения обрабатываются в вычислителе, который определяет направление линии визирования и вырабатывает сигналы для автоматического наведения оружия на цель.
К недостаткам этого устройства следует отнести низкую точность выдаваемой информации, т. к. она находится в прямой зависимости от ошибок изготовления V-образной щелевой диафрагмы, точности установки и стабильности взаимного положения всех элементов системы, выполненных в виде отдельных узлов. Оптическое сопряжение каждой группы излучателей только с соответствующим ей ОЛБ не позволяет производить обработку сигнала по методу триангуляции. Кроме того, к этому устройству относятся все вышеуказанные недостатки, связанные с использованием двух раздельных ОЛБ.
Задачей, на решение которой направлено предлагаемое техническое решение, является повышение точности определения направления линии визирования и повышение быстродействия устройства, что положительно сказывается на выполнении технических задач.
Цель достигается тем, что в устройстве, содержащем блок индикации, жестко соединенный с излучателями, оптически сопряженными с двумя ОЛБ, образующими угломерную систему, каждый из которых включает объектив с диафрагмой и линейку фоточувствительных элементов приемника и блок обработки информации, оптические оси оптико-локационных блоков расположены в одной плоскости под углом друг к другу, каждый объектив оптико-локационного блока выполнен из двух полуцилиндров, соединенных плоскими поверхностями, на одну из которых нанесена щелевая диафрагма, продольная ось которой параллельна образующей цилиндра и перпендикулярна плоскости, в которой расположены линейки приемников. При этом на вторую плоскую поверхность полуцилиндра нанесен интерференционный фильтр, а ОЛБ размещены в общем корпусе.
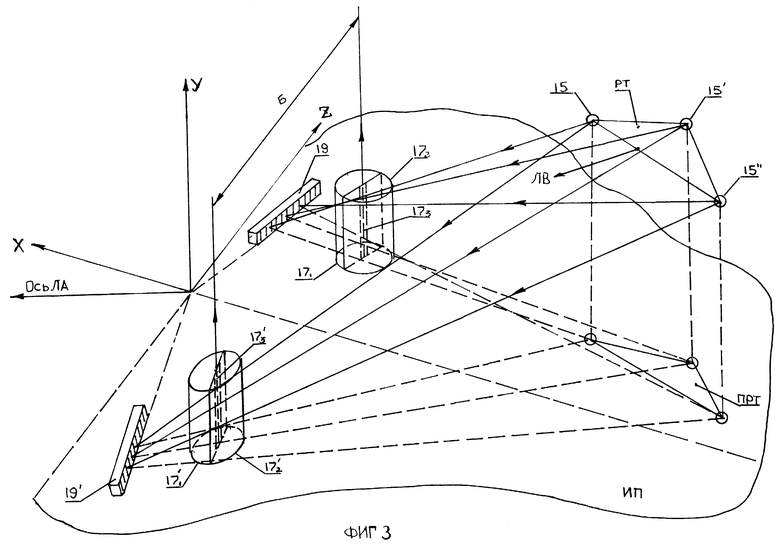
Оптическая система формирует поток от излучателей таким образом, что положение реперных излучателей фиксируется фотоприемниками в виде проекции реперов на измерительную плоскость XZ (см. фиг. 3), где и формируется проекция реперного треугольника. При этом размеры проекции не зависят от расстояния реперного треугольника от измерительной плоскости, а зависят только от углового положения. Аналогичным образом соотношение сторон проекции реперного треугольника не зависит от его перемещения по оси Y, а зависит только от углового положения ЛВ (линии визирования).
Технический результат достигается тем, что все излучатели оптически сопряжены с двумя оптико-локационными блоками угломерной системы, которые последовательно фиксируют излучение от каждого излучателя одновременно двумя линейками фоточувствительных элементов ОЛБ, расположенных в измерительной плоскости (ИП) XZ на некоторой базе Б, что и позволяет определять положение реперов на ИП триангуляционным методом. Размещение двух ОЛБ в едином жестком корпусе обеспечивает согласование их осей при изготовлении, что исключает их взаимную союстировку на объекте и разъюстировку при эксплуатации.
Нашлемная система целеуказания содержит: блок индикации 1 с узлом регулировки яркости ее светодиодов, на корпусе которого размещены излучающие диоды, образующие реперный узел 11, оптико-электронную угломерную систему 2 и блок обработки информации 3 (см. фиг. 1).
Блок индикации 1 выполнен в виде автоколлиматорного визира.
Оптическая схема блока индикации состоит из призм 4, 5, образующих куб, оптического элемента 6, контактирующего с поверхностью куба и установленного с возможностью перемещения.
На одну из поверхностей куба нанесена прицельная марка (символ), например, "два концентрических кольца", а на поверхность элемента 6, осуществляющего центровку марок - "крест", при этом марки подсвечиваются светодиодами 7 и 8. Кроме того, в оптической системе индикации имеется зеркало 9, изменяющее направление оптической оси, объектив, включающий линзы 10, 11, и расположенное за объективом плоское полупрозрачное монохромное зеркало 12, закрепленное на кронштейне с возможностью перемещения.
В рабочем положении зеркало 12 находится в поле зрения глаза оператора. Узел регулировки яркости светодиодов 7, 8 включает фотодиод 13 с защитным стеклом 14 и схему автоматической регулировки яркости светодиодов (АРЯ).
Реперный узел 11, размещенный на наружной поверхности корпуса системы индикации 1, состоит из трех излучающих диодов (ИД) 15, 15', 15'', снабженных, как правило, сферическими линзами для создания равномерного излучения. Количество и расположение излучателей зависит от зоны обзора.
В нашем примере угол поворота головы оператора - 60o. Три ИД 15, 15', 15'' расположены в вершинах треугольника. Образуемая ими реперная плоскость находится под фиксированным углом по отношению к оптической оси коллиматора, а следовательно, и к линии визирования оператора. Для получения зоны обзора 90o необходимо разместить на боковых поверхностях шлема две группы излучателей.
Оптико-электронная угломерная система 2, оптически сопряженная с реперным узлом 11, состоит из двух идентичных оптико-локационных блоков (ОЛБ) 16, 16'. Жестко взаимосвязанные ОЛБ 16,16' содержат цилиндрический объектив 17, (17'), выполненный из двух полуцилиндров 171, 172, 17'1, 17'2 (фиг. 3), соединенных плоскими поверхностями, на одной из которых нанесено непрозрачное покрытие, в котором выполнена щелевая диафрагма 173 (17'3), параллельная оси Y, корректирующую линзу 18, 18' и линейку фоточувствительных элементов приемника 19, 19'. Угловое положение оптических осей ОЛБ формируется из условия гарантированного попадания реперных излучателей в поле зрения объективов с учетом реальных перемещений головы оператора. Электронные блоки 20, 20' управляют работой соответствующего фотоприемника 19, 19'.
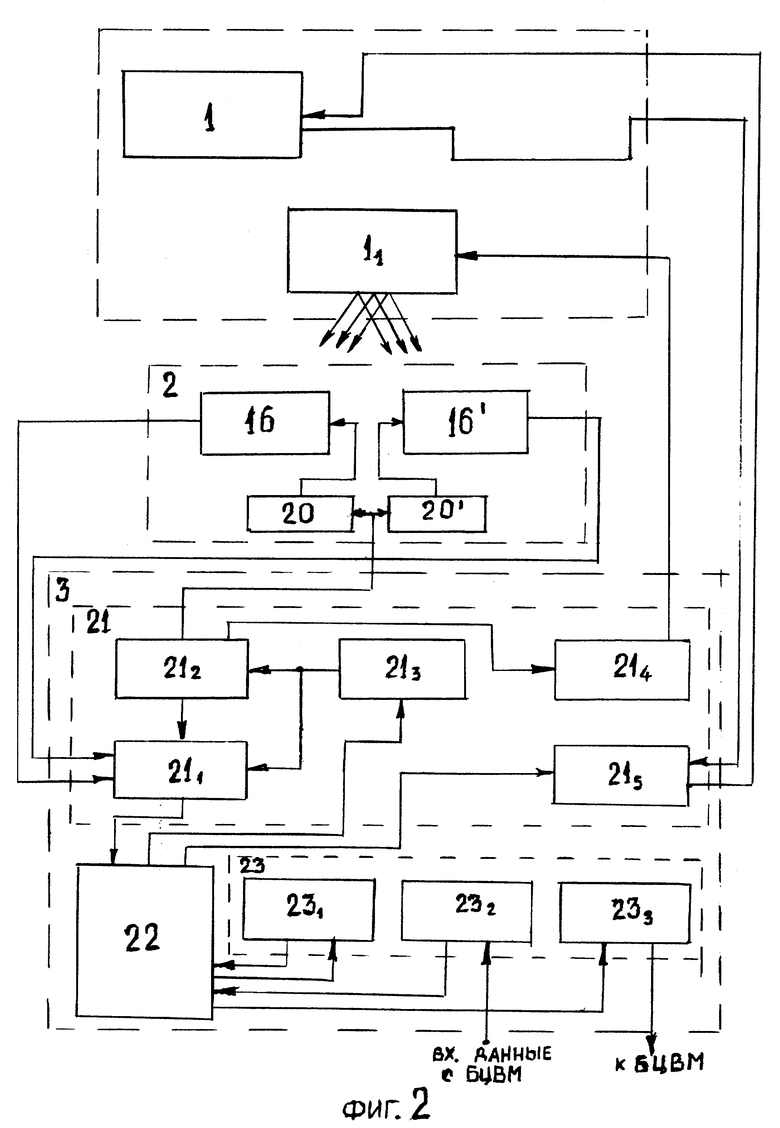
Видеосигналы оптико-электронной угломерной системы поступают в электронный блок обработки информации 3. В составе блока 3 имеются: блок 21, включающий преобразователь видеосигнала 211, формирователь импульсов 212, устройство управления ИД 213, усилитель ИД 214 и устройство управления индикацией 215; вычислители 22 и блок 23, состоящий из запоминающего устройства 231, приемника входных данных 232 из БЦВМ самолетной системы и передатчика выходных данных в самолетную систему (БЦВМ) 233 (фиг. 2). Состав и структура блока обработки информации 3 зависит от условий применения устройства и решаемых задач, поэтому они могут изменяться. Модули выполняют стандартные функции формирования, преобразования, управления. Они могут быть специализированными для применения в конкретном комплексе аппаратуры, но могут быть включены в состав как комплектующие изделия, разработанные для авиационного применения.
Заявляемая система работает следующим образом. При включении питания и подаче команд от БЦВМ на приемник входных данных 232, дешифрованная им информация поступает в вычислитель 22. Преобразованные в нем сигналы подаются на соответствующие блоки 213 и 215, в которых осуществляются функциональные преобразования сигналов для выдачи определенных управляющих команд. По сигналам устройства управления индикацией 215 на зеркале 12 высвечиваются соответствующие прицельные марки. На устройство 1 подается питание подсветки, осуществляемой светодиодами 7, 8. Уровень яркости подсветки регулируется входным сигналом, а необходимый контраст между маркой и подстилающим фоном поддерживается с помощью контура автоматической регулировки яркости 1.
По сигналам устройства управления излучающими диодами 213 формирователь 212 формирует тактовые и строчные синхроимпульсы соответствующими генераторами, а преобразователь видеосигналов 211 подготавливается к приему информации с оптико-электронной угломерной системы 2. Излучающие диоды 15, 15', 15'' запитываются импульсным током, последовательность запитки которых определяется тактами запуска, формируемыми блоком 212, затем эти импульсы усиливаются в усилителе ИД 214 и подаются на вход реперного узла 11. Длительность излучения ИД 15, 15', 15'' регулируется сигналами с БЦВМ, преобразованными в запоминающем устройстве 231 и вычислителе 22. Устройство 213, управляя режимами работы ИД 15, 15', 15'', обеспечивает автоматическое поддержание уровня сигнала на фотоприемниках 19, 19', т.к. формируемая последовательность импульсов в устройстве 212 (тактовая и строчная) подается на электронные блоки 20, 20', управляющие работой фотоприемника 19, 19', и преобразователь видеосигналов 211, сигналы с которого через вычислитель 22 и передатчик выходных данных 233 поступают на вход БЦВМ.
Оператор поворотом головы наводит прицельную марку на выбранную цель, при этом линия визирования цели оператором и оптическая ось коллиматора совмещаются. В результате изменяется пространственное положение реперного узла 11. С помощью двух оптико-локационных блоков 16, 16' производится определение пространственных координат XZ ИД 15, 15', 15''. Оптическая система ОЛБ 16, 16' формирует излучение ИД в виде тонкой вертикальной линии, параллельной оси Y, на линейные многоплощадочные фотоприемники 19, 19'. Включение ИД производится в строго определенной последовательности. Сигнал фотоприемного устройства фиксируется синхронно с излучением ИД и определяется соответствующий ему угол. Сигнал от каждого ИД поступает одновременно на два фотоприемника 19, 19', поэтому оба ОЛБ формируют и выдают в блок обработки информации 3 за один цикл включения трех излучателей (15, 15', 15'') видеосигналы о шести углах (от каждого ИД информация о двух углах).
Одновременно в блок обработки информации 3 поступает информация об опорных (тактовых) и отсчетных (строчных) импульсах. Поступившие в устройство 211 сигналы обрабатываются, аналоговый сигнал преобразуется в цифровой код и осуществляется фильтрация полезных сигналов от помех. Амплитуды полезных сигналов и номера чувствительных площадок, от которых эти сигналы получены, подаются в вычислитель 22. В нем вычисляются координаты реперных излучателей путем решения треугольников, имеющих основанием базу - расстояние Б между осями ОЛБ (16, 16'), а вершинами - реперные излучатели (15, 15', 15''), т.е. углы между основанием и сторонами треугольника, содержащимися в информации ОЛБ. По координатам XZ реперных излучателей 15, 15', 15'' определяется положение реперной плоскости (РП) и положение жестко связанной с ней линии визирования (ЛВ), т.е. углов по тангажу и по крену по методу триангуляции (см. источник 5). Полученная информация через передатчик выходных сигналов 233 выдается в БЦВМ самолетной системы.
Предлагаемое техническое решение жестко привязывает линию визирования к бортовой системе координат летательного аппарата (см. фиг. 3). Все входящие в него устройства - это законченные модули, которые можно заменять по мере совершенствования технологии, расширения функций, кооперации и т.п. Наличие в составе нашлемной системы целеуказания собственного вычислителя позволяет делать систему законченной, автономной, гибкой, универсальной, не зависящей от работоспособности, загруженности БЦВМ. Оптико-локационный двухкоординаторный блок, выполненный из двух ОЛБ, установленных на общее посадочное место, упрощает юстировку системы и повышает качество получаемой информации. А ОЛБ в результате их объединения на одном посадочном месте могут быть установлены на индикаторе лобового стекла или любом жестком элементе конструкции кабины, тем самым увеличивается кабинное пространство, что чрезвычайно важно для оператора. Выполнение приемной части ОЛБ в виде цилиндрической оптики с применением многоплощадочного приемника повышает точностные характеристики видеосигнала, быстроту получения информационных сигналов и снижает стоимость прибора.
Источники информации
1. System Accuracy and Resolution, Denel, Kentron, Commercialin-Confidence" 03290-25910-701, 25 September 1995.
2. Патент Великобритании N 2239366, опубл. 26.06.91 г., МКИ5 G 01 S 5/16.
3. Патент ЕР N 0294101 B1, опубл. 15.12.93 г., МКИ5 F 41 G 3/22.
4. Патент США N 4672562, опубл. 09.06.87 г., МКИ4 G 01 В 11/26.
5. Патент РФ N 2079810, МКИ6 G 01 C 1/00, приор. 27.04.93 г.
6. Патент США N 4111555, опубл. 05.09.78 г., МКИ2 G 01 В 11/26 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ, ПРИЦЕЛИВАНИЯ И ИНДИКАЦИИ | 2007 |
|
RU2321813C1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ЗОННОГО СКАНИРОВАНИЯ | 1998 |
|
RU2147762C1 |
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2168751C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ ЛОКАЦИИ ИСТОЧНИКА ИЗЛУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2275652C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЛИНЕЙНЫХ И УГЛОВЫХ КООРДИНАТ ШЛЕМА ОПЕРАТОРА В КАБИНЕ ЛЕТАТЕЛЬНОГО АППАРАТА И УЛЬТРАЗВУКОВАЯ НАШЛЕМНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2357184C1 |
Заявленная нашлемная система целеуказания относится к области оптико-электронного приборостроения, а точнее к системам, в которых человек-оператор взаимодействует с техническими средствами, служащими для выдачи угловых координат линии визирования оператора, фиксируемой с помощью оптикоэлектронных устройств, сигналы с которых обеспечивают автоматическое наведение оружия на цель. Предлагаемое устройство содержит блок индикации, жестко соединенный с излучателями, оптически сопряженными с двумя оптико-локационными блоками, включающими каждый диафрагму и линейку фоточувствительных элементов, и блок обработки информации. При этом оптические оси оптико-локационных блоков и линейки фоточувствительных элементов расположены в одной плоскости под углом друг к другу и каждый оптико-локационный блок снабжен объективом, выполненным в виде двух полуцилиндрических линз, соединенных плоскими поверхностями, на одну из которых нанесена щелевая диафрагма, продольная ось которой параллельна образующей цилиндра и перпендикулярна плоскости расположения фоточувствительных линеек. На вторую плоскую поверхность полуцилиндрических линз нанесен интерференционный фильтр, а оптико-локационные блоки размещены в общем корпусе. Технический результат - повышение точностных характеристик видеосигнала, быстродействия системы наведения. 2 з. п. ф-лы, 3 ил.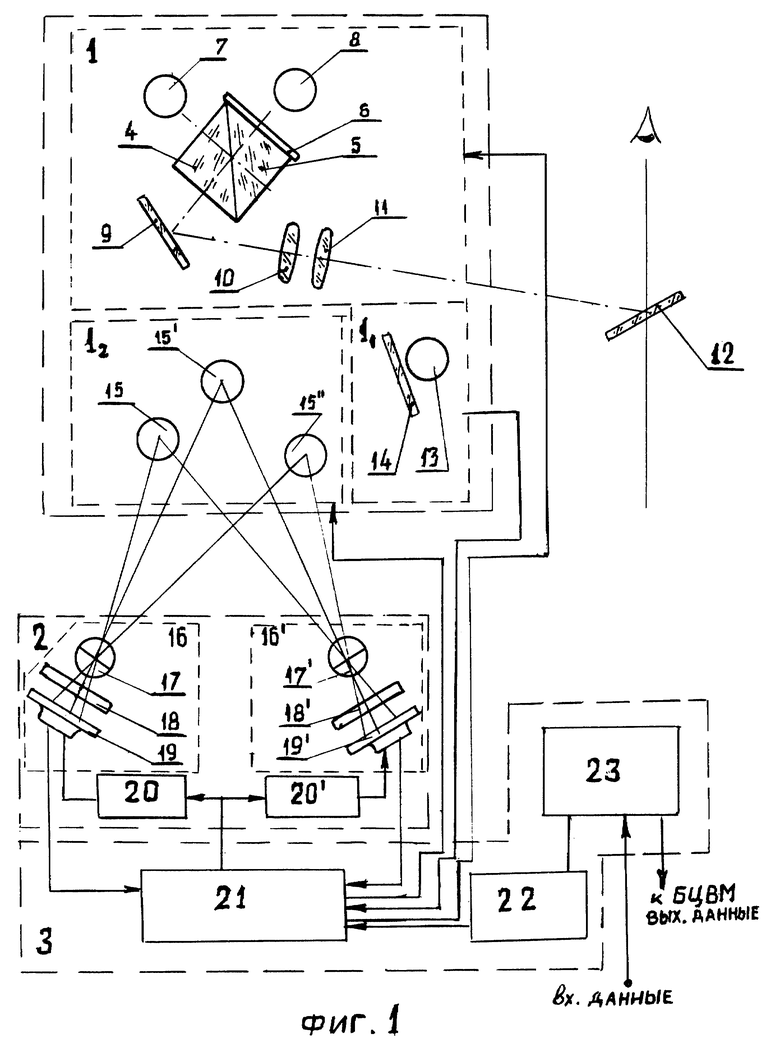
| US 4111555, 05.09.1978 | |||
| СПОСОБ ПРОИЗВОДСТВА КОЛБАСНЫХ ИЗДЕЛИЙ ИЗ МЯСА ПТИЦЫ С ПИВНОЙ ДРОБИНОЙ | 2003 |
|
RU2239336C1 |
| US 5059009, 22.10.1991 | |||
| US 3764198, 09.10.1973 | |||
| US 6014270, 11.01.2000 | |||
| DE 34466009 А1, 26.06.1986 | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВОЗДУХОПРОНИЦАЕМОСТИ ФИЛЬТРОВАЛЬНОЙ ТКАНИ | 0 |
|
SU294101A1 |
| US 3917412, 04.11.1975 | |||
| СОСТАВ ДЛЯ УДАЛЕНИЯ АСФАЛЬТЕНО-СМОЛОПАРАФИНОВЫХ ОТЛОЖЕНИЙ | 1999 |
|
RU2157426C1 |
| US 4672562, 09.06.1987 | |||
| RU 2055311 С1, 27.02.1996. | |||

