Изобретение относится к вычислительной технике и может быть использовано для сбора информации от внешних источников и последующей ее обработки для выработки сигналов управления различным корабельным оборудованием, в частности корабельным оружием.
В настоящее время корабельные объекты управления предъявляют к управляющим вычислительным системам высокие требования по реализации сложных алгоритмов, требующих больших объемов вычислений за ограниченное время, а также по надежности и живучести.
Известна вычислительная система [1], состоящая из нескольких микропроцессоров, соединенных посредством системной шины с общей памятью. Обмен информацией между микропроцессорами осуществляется через общую память, доступ микропроцессоров к общей памяти обеспечивается распределителем системной шины.
К недостаткам этой системы следует отнести снижение общей производительности микропроцессоров, обусловленное ожиданиями разрешения доступа к системной шине при одновременном обращении к общей памяти нескольких микропроцессоров, а также невозможность построения пространственно распределенной системы. связанная с ограничением на физическую длину системной шины.
Известна также многопроцессорная система [2], содержащая исполнительные микропроцессорные блоки, микропроцессорные блоки ввода-вывода, внешнее оперативное запоминающее устройство, устройство связи с памятью, блок коммутации. Синхронизация работы элементов системы осуществляется сигналами общего генератора тактовых импульсов.
Система имеет ограниченные функциональные возможности и высокую сложность управления вычислительным процессом системы.
Наиболее близкой по технической сущности к предлагаемой корабельной управляющей вычислительной системе является многопроцессорная корабельная управляющая вычислительная система [3], содержащая микропроцессоры с двумя интерфейсными магистралями, внешнее оперативное запоминающее устройство, устройства обмена информацией, блоки ввода-вывода, коммутатор выходов, распределители сигналов и пульт управления, связанные в систему посредством первой, второй, третьей и четвертой интерфейсных магистралей.
Недостатком этой системы является то, что структура связей интерфейсных магистралей определяет функции микропроцессоров в организации вычислительного процесса, в результате чего система обладает низкими модернизационными и модификационными возможностями, ограничивающими области ее применения.
Задачей изобретения является создание многопроцессорной корабельной управляющей вычислительной системы, обеспечивающей требования по применению на кораблях с малым водоизмещением, обладающей широкими модернизационными и модификационными возможностями и повышенной живучестью.
Сущность изобретения заключается в том, что в многопроцессорную корабельную управляющую систему, содержащую первый процессор, второй процессор, третий процессор, четвертый процессор, первую внутреннюю интерфейсную магистраль, вторую внутреннюю интерфейсную магистраль, третью внутреннюю интерфейсную магистраль, четвертую внутреннюю интерфейсную магистраль, блок клавиатуры, дисплей, дополнительно введены:
пятый процессор, шестой процессор, пятая внутренняя интерфейсная магистраль, шестая внутренняя интерфейсная магистраль, координатно-указательное устройство, первый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, второй блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, третий блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, четвертый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, пятый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, шестой блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, блок управления дисплеем, первый блок дискретных входов-выходов, второй блок дискретных входов-выходов, третий блок дискретных входов-выходов, четвертый блок дискретных входов-выходов, первый блок перепрограммируемого постоянного запоминающего устройства (ППЗУ), второй блок ППЗУ, третий блок ППЗУ, четвертый блок ППЗУ, блок ключей блокировки цепей старта, блок ключей блокировки цепей старта объектов индивидуального наведения (ОИН) левого борта, блок ключей блокировки цепей старта ОИН правого борта, блок блокировки цепей старта объектов группового наведения (ОГН), пульт резервного способа стрельбы ОИН левого борта, пульт резервного способа стрельбы ОИН правого борта, пульт резервного способа стрельбы ОГН, первый блок ввода данных от корабельных систем, второй блок ввода данных от корабельных систем, третий блок ввода данных от корабельных систем, четвертый блок ввода данных от корабельных систем, пятый блок ввода данных от корабельных систем, блок связи со второй интерфейсной сетевой магистралью межпроцессорного обмена, блок управления последовательными радиальными каналами связи, первый последовательный радиальный канал связи, второй последовательный радиальный канал связи, третий последовательный радиальный канал связи, первый блок цифроаналоговых преобразователей, второй блок цифроаналоговых преобразователей, третий блок цифроаналоговых преобразователей, первый блок преобразователей фаза-код, второй блок преобразователей фаза-код, третий блок преобразователей фаза-код, первый блок устройств аналогового ввода-вывода, второй блок устройств аналогового ввода-вывода, третий блок устройств аналогового ввода-вывода, первый блок следящих устройств, второй блок следящих устройств, блок управления шаговым двигателем, первая сетевая интерфейсная магистраль межпроцессорного обмена, вторая сетевая интерфейсная магистраль межпроцессорного обмена.
Сущность изобретения поясняется чертежом, на котором изображена структурная схема системы.
На чертеже обозначены:
1 - первый процессор;
2 - второй процессор;
3 - третий процессор;
4 - четвертый процессор;
5 - первая внутренняя интерфейсная магистраль;
6 - вторая внутренняя интерфейсная магистраль;
7 - третья внутренняя интерфейсная магистраль;
8 - четвертая внутренняя интерфейсная магистраль;
9 - блок клавиатуры;
10 - дисплей;
11 - пятый процессор;
12 - шестой процессор;
13 - пятая внутренняя интерфейсная магистраль;
14 - шестая внутренняя интерфейсная магистраль;
15 - координатно-указательное устройство;
16 - первый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена;
17 - второй блок связи с сетевой интерфейсной магистралью межпроцессорного обмена;
18 - третий блок связи с сетевой интерфейсной магистралью межпроцессорного обмена;
19 - четвертый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена;
20 - пятый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена;
21 - шестой блок связи с сетевой интерфейсной магистралью межпроцессорного обмена;
22 - блок управления дисплеем;
23 - первый блок дискретного ввода-вывода;
24 - второй блок дискретного ввода-вывода;
25 - третий блок дискретного ввода-вывода;
26 - четвертый блок дискретного ввода-вывода;
27 - первый блок ППЗУ;
28 - второй блок ППЗУ;
29 - третий блок ППЗУ;
30 - четвертый блок ППЗУ;
31 - блок ключей блокировки цепей старта;
32 - блок ключей блокировки цепей старта ОИН левого борта;
33 - блок ключей блокировки цепей старта ОИН правого борта;
34 - блок ключей блокировки цепей старта ОГН;
35 - пульт резервного способа стрельбы ОИН левого борта;
36 - пульт резервного способа стрельбы ОИН правого борта;
37 - пульт резервного способа стрельбы ОГН;
38 - блок аварийного выброса ОГН;
39 - первый блок ввода данных от корабельных систем;
40 - второй блок ввода данных от корабельных систем;
41 - третий блок ввода данных от корабельных систем;
42 - четвертый блок ввода данных от корабельных систем;
43 - пятый блок ввода данных от корабельных систем;
44 - блок связи со второй интерфейсной сетевой магистралью межпроцессорного обмена;
45 - блок управления последовательными радиальными каналами связи;
46 - первый последовательный радиальный канал связи;
47 - второй последовательный радиальный канал связи;
48 - третий последовательный радиальный канал связи;
49 - первый блок цифроаналоговых преобразователей;
50 - второй блок цифроаналоговых преобразователей;
51 - третий блок цифроаналоговых преобразователей;
52 - первый блок преобразователей фаза-код;
53 - второй блок преобразователей фаза-код;
54 - третий блок преобразователей фаза-код;
55 - первый блок устройств аналогового ввода-вывода;
56 - второй блок устройств аналогового ввода-вывода;
57 - третий блок устройств аналогового ввода-вывода;
58 - первый блок следящих устройств;
59 - второй блок следящих устройств;
60 - блок управления шаговыми двигателями;
61 - первая сетевая интерфейсная магистраль межпроцессорного обмена;
62 - вторая сетевая интерфейсная магистраль межпроцессорного обмена;
63 - первая группа входов интерфейсов связи с корабельными системами;
64 - вторая группа входов интерфейсов связи с корабельными системами;
65 - группа дискретных входов-выходов связи с ОИН левого борта;
66 - группа дискретных входов-выходов связи с ОИН правого борта;
67 - группа дискретных входов-выходов связи с ОГН;
68 - группы выходов управления цепями старта ОИН левого борта;
69 - группы выходов управления цепями старта ОИН правого борта;
70 - группы выходов управления цепями старта ОГН;
71 - группа выходов данных в виде угла поворота вала для связи с ОИН левого борта;
72 - группа выходов данных в виде угла поворота вала для связи с ОИН правого борта;
73 - группа аналоговых выходов для связи с пусковыми установками ОГН;
74 - группа выходов управления шаговыми двигателями ОГН;
75 - первое МПВУ;
76 - второе МПВУ;
77 - третье МПВУ;
78 - четвертое МПВУ;
79 - пятое МПВУ;
80 - шестое МПВУ;
81 - пульт управления.
В предлагаемой многопроцессорной корабельной управляющей системе интерфейсные входы-выходы первого блока 16 связи с сетевой интерфейсной магистралью межпроцессорного обмена, первого процессора 1, блока 22 управления дисплеем, первого блока 23 дискретного ввода-вывода, первого блока 27 ППЗУ соединены между собой посредством первой внутренней интерфейсной магистрали 5.
Блок 22 управления дисплеем представляет собой обычный видеоадаптер (контроллер), преобразующий цифровые сигналы в сигналы управления дисплеем, необходимые для формирования изображения на экране дисплея, например сигналы RGB по стандартам VGA, SVGA и другим широко известным стандартам. Назначение видеоадаптера, принципы формирования видеосигнала, а также принципы его программирования рассмотрены, например, в книге [4, сс. 8-15].
Интерфейсные входы-выходы второго блока 17 связи с сетевой интерфейсной магистралью межпроцессорного обмена, второго процессора 2, первого, второго и третьего блоков 39, 40 и 41 ввода данных от корабельных систем соединены между собой посредством второй внутренней интерфейсной магистрали 6.
Интерфейсные входы-выходы третьего блока 18 связи с сетевой интерфейсной магистралью межпроцессорного обмена, блока 44 связи со второй интерфейсной сетевой магистралью межпроцессорного обмена, третьего процессора 3, четвертого и пятого блоков 42 и 43 ввода данных от корабельных систем, блока 45 управления последовательными радиальными каналами связи соединены между собой посредством третьей внутренней интерфейсной магистрали 7.
Интерфейсные входы-выходы четвертого блока 19 связи с сетевой интерфейсной магистралью межпроцессорного обмена, первого блока 49 цифроаналоговых преобразователей, первого блока 52 преобразователей фаза-код, четвертого процессора 4, второго блока 24 дискретного ввода-вывода, второго блока 28 ППЗУ соединены между собой посредством четвертой внутренней интерфейсной магистрали 8.
Интерфейсные входы-выходы пятого блока 20 связи с сетевой интерфейсной магистралью межпроцессорного обмена, второго блока 50 цифроаналоговых преобразователей, второго блока 53 преобразователей фаза-код, пятого процессора 11, третьего блока 25 дискретного ввода-вывода, третьего блока 29 ППЗУ соединены между собой посредством пятой внутренней интерфейсной магистрали 13.
Интерфейсные входы-выходы шестого блока 21 связи с сетевой интерфейсной магистралью межпроцессорного обмена, третьего блока 51 цифроаналоговых преобразователей, третьего блока 54 преобразователей фаза-код, шестого процессора 12, четвертого блока 26 дискретного ввода-вывода, четвертого блока 30 ППЗУ, блока 60 управления шаговыми двигателями соединены между собой посредством шестой внутренней интерфейсной магистрали 14.
Блок 60 управления шаговыми двигателями вырабатывает последовательности импульсов, необходимых для управления шаговыми двигателями. Схемы блоков управления шаговыми двигателями широко известны и рассмотрены, например, в книге [5].
Сетевые входы-выходы первого, второго и третьего блоков 16, 17 и 18 связи с сетевой интерфейсной магистралью межпроцессорного обмена соединены между собой посредством первой сетевой интерфейсной магистрали 61 межпроцессорного обмена.
Сетевые входы-выходы четвертого, пятого и шестого блоков 19, 20 и 21 связи с сетевой интерфейсной магистралью межпроцессорного обмена, а также блока 44 связи со второй интерфейсной сетевой магистралью межпроцессорного обмена соединены между собой посредством второй сетевой интерфейсной магистрали 62 межпроцессорного обмена.
К первому входу первого процессора 1 подключен блок клавиатуры 9, ко второму входу первого процессора 1 подключено координатно-указательное устройство 15, к выходу блока 22 управления дисплеем подключен дисплей 10, к выходу первого блока 23 дискретного ввода-вывода подключен блок 31 ключей блокировки цепей старта, выход которого соединен со вторыми входами блоков 32, 33 и 34 ключей блокировки цепей старта ОИН левого борта, ОИН правого борта и ОГН соответственно.
Координатно-указательное устройство 15 может быть выполнено в виде светового пера (см. , например, [4, с. 285-291]), манипуляторов типа мышь, трекбол, джойстик и тому подобных устройств.
Входы первого, второго и третьего блоков 39, 40 и 41 ввода данных от корабельных систем образуют первую группу 63 входов интерфейсов связи с корабельными системами-источниками информации.
Входы третьего процессора 3, четвертого и пятого блоков 42 и 43 ввода данных от корабельных систем образуют вторую группу 64 входов интерфейсов связи с корабельными системами - источниками информации, к блоку 45 управления последовательными радиальными каналами связи подключены первый, второй и третий последовательные радиальные каналы 46, 47 и 48 связи, которые подключены соответственно к четвертому, пятому и шестому процессорам 4, 11 и 12.
Выходы второго, третьего и четвертого блоков 24, 25 и 26 дискретного ввода-вывода соединены с первыми входами соответственно блоков 32, 33 и 34 ключей блокировки цепей старта ОИН левого борта, ОИН правого борта и ОГН, выходы которых составляют соответственно группы 68, 69 и 70 выходов управления цепями старта, ОИН левого борта, ОИН правого борта и ОГН, входы-выходы второго, третьего и четвертого блоков 24, 25 и 26 дискретного ввода-вывода образуют соответственно группы 65, 66 и 67 дискретных входов-выходов связи с ОИН левого борта, с ОИН правого борта и с ОГН.
Выходы пультов 35, 36 и 37 резервного способа стрельбы ОИН левого борта, ОИН правого борта и ОГН соединены с третьими входами соответственно блоков 32, 33 и 34 ключей блокировки цепей старта ОИН левого борта, ОИН правого борта и ОГН соответственно к третьему входу блока 34 ключей блокировки цепей старта ОГН подключен также выход блока 38 аварийного выброса ОГН.
Выходы первого, второго и третьего блоков 49, 50 и 51 цифроаналоговых преобразователей соединены с входами соответственно первого, второго и третьего блоков 55, 56 и 57 устройств аналогового ввода-вывода, входы первого, второго и третьего блоков 52, 53 и 54 преобразователей фаза-код соединены с выходами соответственно первого, второго и третьего блоков 55, 56 и 57 устройств аналогового ввода-вывода, первый и второй блоки 55 и 56 устройств аналогового ввода-вывода соединены соответственно с первым и вторым блоками 58 и 59 следящих устройств, входы-выходы которых образуют группы 71 и 72 выходов данных в виде угла поворота вала для связи с ОИН левого и правого бортов соответственно входы-выходы третьего блока 57 устройств аналогового ввода-вывода образуют группу 73 аналоговых выходов для связи с пусковыми установками ОГН.
Выходы блока 60 управления шаговыми двигателями образуют группу 74 выходов управления шаговыми двигателями ОГН.
Первый блок 16 связи с сетевой интерфейсной магистралью межпроцессорного обмена, первый процессор 1, блок 22 управления дисплеем, первый блок 23 дискретного ввода-вывода, первый блок 27 ППЗУ образуют первое МПВУ 75.
Второй блок 17 связи с сетевой интерфейсной магистралью межпроцессорного обмена, второй процессор 2, первый, второй и третий блоки 39, 40 и 41 ввода данных от корабельных систем образуют второе МПВУ 76.
Третий блок 18 связи с сетевой интерфейсной магистралью межпроцессорного обмена, блок 44 связи со второй интерфейсной сетевой магистралью межпроцессорного обмена, третий процессор 3, четвертый и пятый блоки 42 и 43 ввода данных от корабельных систем, блок 45 управления последовательными радиальными каналами связи образуют третье МПВУ 77.
Четвертый блок 19 связи с сетевой интерфейсной магистралью межпроцессорного обмена, первый блок 49 цифроаналоговых преобразователей, первый блок 52 преобразователей фаза-код, четвертый процессор 4, второй блок 24 дискретного ввода-вывода, второй блок 28 ППЗУ образуют четвертое МПВУ 78.
Пятый блок 20 связи с сетевой интерфейсной магистралью межпроцессорного обмена, второй блок 50 цифроаналоговых преобразователей, второй блок 53 преобразователей фаза-код, пятый процессор 11, третий блок 25 дискретного ввода-вывода, третий блок 29 ППЗУ образуют пятое МПВУ 79.
Шестой блок 21 связи с сетевой интерфейсной магистралью межпроцессорного обмена, третий блок 51 цифроаналоговых преобразователей, третий блок 54 преобразователей фаза-код, шестой процессор 12, четвертый блок 26 дискретного ввода-вывода, четвертый блок 30 ППЗУ, блок 60 управления шаговыми двигателями образуют шестое МПВУ 80.
Следящие устройства, входящие в состав первого и второго блоков 58 и 59 следящих устройств, служат для управления положением валов. Информация, выдаваемая при помощи положения валов (группы 71 и 72 выходов данных в виде угла поворота вала для связи, соответственно, с ОИН левого борта и ОИН правого борта) используется для ввода заданий объектам управления (ОИН). Каждое следящее устройство содержит усилитель управления двигателем, двигатель, редуктор, на валу которого находится датчик обратной связи, а также содержит выходные валы для ввода данных в ОИН в виде угла поворота вала. Сигналы датчиков обратной связи каждого следящего устройства через соответственно первый или второй блок 55 или 56 устройств аналогового ввода-вывода поступают на вход соответствующего преобразователя фаза-код соответственно блока 52 или 53 преобразователей фаза-код, а затем в цифровом виде передаются для обработки в соответственно четвертый или пятый процессоры 4 и 11. Функции управляющих устройств в следящих системах выполняют соответственно четвертый и пятый процессоры 4 и 11. Сигнал с каждого цифроаналогового преобразователя первого или второго блока 49 или 50 цифроаналоговых преобразователей, поступающий в виде сигнала постоянного напряжения соответственно первым или втором блоком 55 или 56 устройств аналогового ввода-вывода преобразуется в переменное напряжение и поступает на вход усилителя управления двигателем каждого следящего устройства.
Блоки 32, 33 и 34 ключей блокировки цепей старта ОИН левого борта, ОИН правого борта и ОГН состоят из набора электрически управляемых коммутационных элементов (реле, контакторов), соединенных по заданной логической схеме.
Пульты 35, 36 и 37 резервного способа стрельбы ОИН левого борта, ОИН правого борта и ОГН представляют собой блоки органов управления, индикаторов и электрически управляемых коммутационных элементов и могут быть выполнены, например, в виде обычных клавиатур с набором буквенных, цифровых и функциональных клавиш. В частности, с пультов 35, 36 и 37 может быть осуществлена подача команды "Пуск", как это выполняется, например, пультом, описанным в книге [6].
Через группы 68, 69 и 70 выходов управления цепями старта ОИН левого борта, ОИН правого борта и ОГН выдаются электрические сигналы, необходимые для осуществления старта объектов управления (ОИН и ОГН).
Входы, входящие в первую и вторую группу 63 и 64 входов интерфейсов связи с корабельными системами, предназначены для подключения к многопроцессорной корабельной управляющей вычислительной системе корабельных систем - источников информации (радиолокационных и гидроакустических комплексов, навигационных комплексов и так далее).
Первый-пятый блоки 39-43 ввода данных от корабельных систем обеспечивают реализацию цифровых каналов связи с использованием соответствующих интерфейсов: асинхронных интерфейсов RS-422/RS-485, синхронных интерфейсов RS-422/RS-485, мультиплексных каналов связи, числоимпульсных каналов связи.
Система является пространственно распределенной. Пульт 81 управления, второе и третье МПВУ 76 и 77 размещены в одном базовом несущем конструктиве, который располагается в посту управления. Четвертое МПВУ 78 со связанными с ним первым блоком 55 устройств аналогового ввода-вывода, блоком 32 ключей блокировки цепей старта ОИН левого борта и пультом 35 резервного способа стрельбы ОИН левого борта размещены в другом базовом несущем конструктиве, располагаемом на минимально допустимом расстоянии от соответствующих объектов управления (комплексов ОИН). Аналогично конструктивно оформлены и расположены пятое МПВУ 79 со связанными с ним вторым блоком 56 устройств аналогового ввода-вывода, блоком 33 ключей блокировки цепей старта ОИН правого борта и пультом 36 резервного способа стрельбы ОИН правого борта.
Следящие устройства, входящие в состав первого и второго блоков 58 и 59 следящих устройств, располагаются непосредственно на несущих конструктивах объектов управления (ОИН).
Шестое МПВУ 80 со связанными с ним третьим блоком 57 устройств аналогового ввода- вывода, блоком 34 ключей блокировки цепей старта ОГН, пультом 37 резервного способа стрельбы ОГН размещены в отдельном базовом несущем конструктиве, располагаемом на минимально допустимом расстоянии от соответствующих объектов управления (комплексов ОГН).
Указанный способ расположения составных частей системы обеспечивает сокращение объемов используемой кабельной продукции за счет уменьшения длин кабелей связи с объектами управления и использования цифрового способа передачи информации на значительные расстояния - по сетевым интерфейсным магистралям межпроцессорного обмена (по первой и второй сетевым интерфейсным магистралям 61 и 62 межпроцессорного обмена) и последовательным радиальным каналам связи (по первому, второму и третьему радиальным каналам 46, 47 и 48 связи).
Предлагаемая система предусматривает следующее распределение функций (задач) между первым, вторым, третьим, четвертым, пятым и шестым МПВУ 75, 76, 77, 78, 79 и 80.
Первое МПВУ 75, блок 9 клавиатуры, дисплей 10, координатно-указательное устройство 15, блок 31 ключей блокировки цепей старта образуют пульт 81 управления, обеспечивает решение следующих задач:
- приема по первой сетевой интерфейсной магистрали 61 межпроцессорного обмена данных, принятых от корабельных систем (радиолокационных и гидроакустических комплексов, навигационных комплексов и так далее), обработки этих данных и представления их оператору на дисплее 10 в удобном для восприятия виде;
- ввода оператором управляющих воздействий (команд), их обработки и передачи в соответствующие МПВУ системы (второе, третье, четвертое, пятое или шестое МПВУ 76, 77, 78, 79 или 80);
- оценки эффективности применения каждого типа оружия и выработки рекомендаций по его применению;
- выработки рекомендаций по занятию кораблем определенной позиции;
- приема и отображения на дисплее данных о текущем состоянии МПВУ, входящих в состав системы (первого, второго, третьего, четвертого, пятого и шестого МПВУ 75, 76, 77, 78, 79 и 80);
- приема и отображения на дисплее данных о состоянии объектов управления (ОИН и ОГН), ходе подготовки объектов управления к старту и результатах старта;
- тренировки личного состава.
Второе МПВУ 76 обеспечивает решение задач взаимодействия со связанными с ним корабельными системами - источниками информации, предварительную обработку принятой информации и передачу ее в другие МПВУ системы.
Третье МПВУ 77 обеспечивает решение следующих основных задач:
- приема информации от связанных с ним корабельных систем, предварительной обработки принятой информации и передачи ее в другие МПВУ системы;
- общей организации логико-временного управления процессами подготовки к старту и старта объектов;
- решения функциональных задач выработки данных для управления объектами управления;
- передачи данных для управления объектами управления (ОИН и ОГН) в периферийные МПВУ (в четвертое, пятое и шестое МПВУ 78, 79 и 80);
- приема от периферийных МПВУ (от четвертого, пятого и шестого МПВУ 78, 79 и 80) данных о ходе и результатах управления.
Периферийные МПВУ (четвертое, пятое и шестое МПВУ 78, 79 и 80) обеспечивают решение задач, связанных с непосредственным управлением и взаимодействием с объектами управления (ОИН и ОГН).
Предлагаемая многопроцессорная корабельная управляющая система работает следующим образом.
После подачи питания первый, второй, третий, четвертый, пятый и шестой процессоры 1, 2, 3, 4, 11, 12, входящие в состав соответственно первого, второго, третьего, четвертого, пятого и шестого МПВУ 75, 76, 77, 78, 79 и 80, выполняют пусковой тест самопроверки. При положительных результатах самопроверки первый процессор 1 выполняет начальную загрузку программ из первого блока 27 ППЗУ в свое оперативное запоминающее устройство (входящее в состав первого процессора 1), а также через первую сетевую интерфейсную магистраль 61 межпроцессорного обмена, в оперативные запоминающие устройства второго и третьего процессоров 2 и 3. Четвертый, пятый и шестой процессоры 4, 11 и 12, входящие в состав периферийных МПВУ (четвертого, пятого и шестого МПВУ 78, 79 и 80), выполняют начальную загрузку программ в свои оперативные запоминающие устройства соответственно из второго, третьего и четвертого блоков 28, 29 и 30 ППЗУ.
После начальной загрузки программ выполняются тесты проверки блоков, входящих в состав МПВУ, и тесты взаимодействия МПВУ через первую и вторую сетевые интерфейсные магистрали 61 и 62 межпроцессорного обмена и первый, второй и третий последовательные радиальные каналы 46, 47 и 48 связи. Информация о результатах тестирования передается по первой и второй сетевым интерфейсным магистралям 61 и 62 межпроцессорного обмена в пульт 81 управления и отображается на дисплее 10. При положительных результатах тестирования второе и третье МПВУ 76, и 77 переходят к приему данных от корабельных систем - источников информации, выполняют их предварительную обработку и передачу этих данных через первую и вторую сетевые интерфейсные магистрали 61 и 62 межпроцессорного обмена в другие третье МПВУ системы, в том числе и в первое МПВУ 75, а следовательно, в пульт 81 управления, где она отображается в необходимом объеме и виде на дисплее 10. На основании отображаемых данных оператор выбирает и назначает к подготовке объекты управления (ОИН и ОГН). После назначения объектов управления третье МПВУ 77 начинает вырабатывать в соответствии с заложенной в программу логико-временной диаграммой данные для управления выбранными объектами управления и передает их по второй сетевой интерфейсной магистрали 62 межпроцессорного обмена в четвертое, пятое и шестое МПВУ 78, 79 и 80 в соответствии с выбором объектов управления. Четвертое, пятое и шестое МПВУ 78, 79 и 80 обрабатывают принятые данные и вырабатывают управляющие воздействия на объекты управления: через группы 65, 66 и 67 дискретных входов-выходов связи соответственно с ОИН левого борта, с ОИН правого борта и ОГН выдают дискретные сигналы, а через первый, второй и третий блоки 55, 56 и 57 устройств аналогового ввода-вывода сигналы управления двигателями.
Четвертое и пятое МПВУ 78 и 79, используя данные о положении валов двигателей, поступающие с датчиков устройств аналогового ввода-вывода первого и второго блоков 55 и 56 устройств аналогового ввода-вывода, реализуют функции цифровых следящих устройств, обеспечивая формирование на выходах первого и второго блоков 55 и 56 устройств аналогового ввода-вывода, связанных соответственно с первым и вторым блоками 58 и 59 следящих устройств, сигналов, пропорциональных углам, на которые должны быть развернуты валы двигателей следящих устройств первого и второго блоков 58 и 59 следящих устройств. Шестое МПВУ 80 сигналами, выдаваемыми на выходы группы 74 выходов управления шаговыми двигателями ОГН, управляет шаговыми двигателями, входящими в состав объектов управления (ОГН), а также выдает аналоговые сигналы на выходы группы 73 аналоговых выходов для связи с пусковыми установками ОГН.
Через дискретные входы групп 65, 66 и 67 дискретных входов-выходов связи соответственно с ОИН левого борта, с ОИН правого борта и ОГН четвертое, пятое и шестое МПВУ 78, 79 и 80 получают информацию об объектах управления и передают ее по второй сетевой интерфейсной магистрали 62 межпроцессорного обмена в третье МПВУ 77, выполняющее функции общей организации процесса управления, выработки данных для управления и контроля за процессом управления.
При отказе или повреждении второй сетевой интерфейсной магистрали 62 межпроцессорного обмена взаимодействие третьего МПВУ 77 с периферийными МПВУ (четвертым, пятым и шестым МПВУ 78, 79 и 80) без потери качества управления осуществляется по первому, второму и третьему радиальным каналам 46, 47 и 48 связи, что обеспечивает повышение надежности и живучести системы.
Дополнительно живучесть системы повышена за счет реализации резервного способа стрельбы, который предусматривает выполнение системой возложенных на нее функций с некоторой потерей качества управления. Резервный способ стрельбы обеспечивается путем реализации старта объектов управления (ОИН и ОГН) с пультов 35, 36 и 37 резервного способа стрельбы соответственно ОИН левого борта, ОИН правого борта и ОГН. Эта возможность позволяет отнести данную систему к классу систем, обладающих свойством поддержания работоспособности в условиях деградации.
Система обладает свойствами модернизируемости и модифицируемости, что обеспечивается применением в ее составе ППЗУ, позволяющих изменять функции системы без изменения ее аппаратного состава, а также использованием сетевых интерфейсных магистралей межпроцессорного обмена, обеспечивающих возможность подключения дополнительного оборудования, расширяющего функции системы.
Таким образом, предлагаемая многопроцессорная корабельная управляющая вычислительная система обеспечивает решение необходимого объема функциональных задач, используя меньшие объемы оборудования, обладает свойствами модернизируемости и модифицируемости, а также обеспечивает работу в условиях деградации системы.
Представленные чертеж и описание системы позволяют, используя существующую элементную базу и технологию, изготовить ее промышленным способом и использовать в качестве корабельной системы управления, что характеризует изобретение как промышленно применимое.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Пат. США N 3959775, кл. G 06 F 15/16, 1976 г.
2. А.С. СССР N 907551, кл. G 06 F 15/16, 1982 г.
3. Свид. РФ N 4395 на ПМ, кл. G 06 F 15/16, 1997 г. (прототип).
4. Грайс Д. Графические средства персонального компьютера: Пер. с англ. М.: Мир, 1989. - 376 с. УДК 681.3.
5. Ивоботенко Б. А. и др. Дискретный электропривод с шаговыми двигателями. Под общ. ред. М.Г. Чиликина. - М.: Энергия, 1971. С. 219, рис. 6-1. УДК 621.313.13- 133:62-83.
6. Атамалян Э. Г. Приборы и методы измерения электрических и магнитных величин: Учебное пособие. - М. : Высшая школа, 1982. С. 215. УДК 621.317 (075).
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА "ЛАХНА" | 1998 |
|
RU2147379C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2174704C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОРАБЕЛЬНОГО ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕГО КОМПЛЕКСА | 2004 |
|
RU2267849C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА БЕРЕГОВОГО БАЗИРОВАНИЯ | 2000 |
|
RU2176818C1 |
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2177171C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА КОРАБЕЛЬНОГО КОМПЛЕКСА РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2001 |
|
RU2209463C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ БОЕВОГО КОРАБЛЯ С ПОВЫШЕННОЙ ЖИВУЧЕСТЬЮ | 2011 |
|
RU2510961C2 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ КОМАНДНО-СТРЕЛЬБОВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕЙ СТИСТЕМЫ | 2001 |
|
RU2206167C2 |
Изобретение относится к вычислительной технике и предназначено для сбора информации от внешних источников и последующей ее обработки для выработки сигналов управления различным корабельным оборудованием, в частности корабельным оружием. Технический результат заключается в создании многопроцессорной корабельной управляющей вычислительной системы, обеспечивающей требования по применению на кораблях с малым водоизмещением, обладающей широкими модернизационными и модификационными возможностями и повышенной живучестью. Система содержит шесть процессоров, шесть внутренних интерфейсных магистралей, блок клавиатуры, дисплей, координатно-указательное устройство, шесть блоков связи с сетевой интерфейсной магистралью межпроцессорного обмена, блок управления дисплеем, четыре блока дискретных входов-выходов, четыре блока перепрограммируемых постоянных запоминающих устройств, блок ключей блокировки цепей старта, блоки ключей блокировки цепей старта объектов индивидуального наведения левого и правого бортов, блок блокировки цепей старта объектов группового наведения, пульты резервного способа стрельбы ОИН левого и правого бортов, пульт резервного способа стрельбы ОГН, пять блоков ввода данных от корабельных систем, блок связи со второй интерфейсной сетевой магистралью межпроцессорного обмена, блок управления последовательными радиальными каналами связи, три последовательных радиальных канала связи, три блока цифроаналоговых преобразователей, три блока преобразователей фаза - код, три блока устройств аналогового ввода-вывода, два блока следящих устройств, блок управления шаговым двигателем и две сетевые интерфейсные магистрали межпроцессорного обмена с соответствующими связями. 1 ил.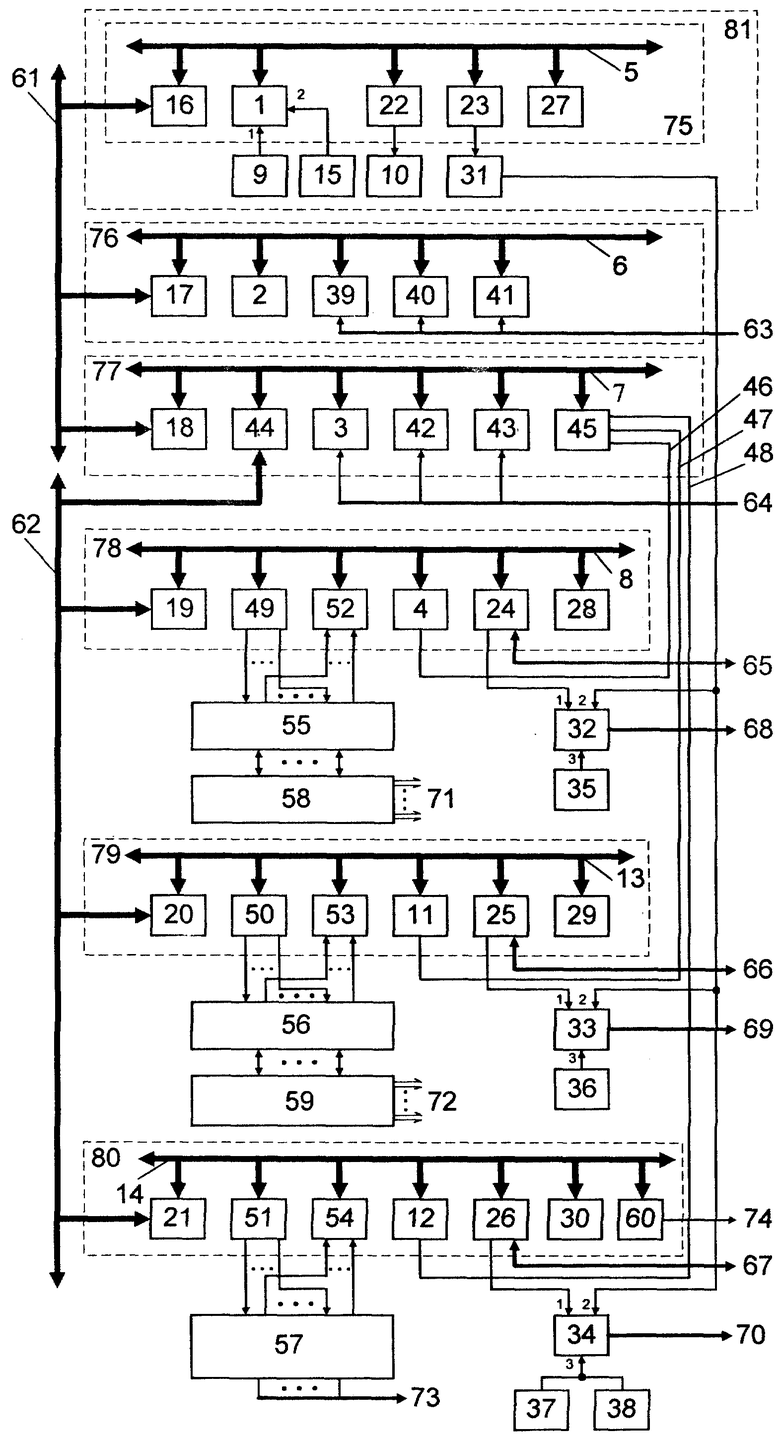
Многопроцессорная корабельная управляющая вычислительная система, содержащая первый процессор, второй процессор, третий процессор, четвертый процессор, первую внутреннюю интерфейсную магистраль, вторую внутреннюю интерфейсную магистраль, третью внутреннюю интерфейсную магистраль, четвертую внутреннюю интерфейсную магистраль, блок клавиатуры, дисплей, отличающаяся тем, что в нее введены пятый процессор, шестой процессор, пятая внутренняя интерфейсная магистраль, шестая внутренняя интерфейсная магистраль, координатно-указательное устройство, первый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, второй блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, третий блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, четвертый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, пятый блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, шестой блок связи с сетевой интерфейсной магистралью межпроцессорного обмена, блок управления дисплеем, первый блок дискретного ввода-вывода, второй блок дискретного ввода-вывода, третий блок дискретного ввода-вывода, четвертый блок дискретного ввода-вывода, первый блок перепрограммируемого постоянного запоминающего устройства, второй блок перепрограммируемого постоянного запоминающего устройства, третий блок перепрограммируемого постоянного запоминающего устройства, четвертый блок перепрограммируемого постоянного запоминающего устройства, блок ключей блокировки цепей старта, блок ключей блокировки цепей старта объектов индивидуального наведения левого борта, блок ключей блокировки цепей старта объектов индивидуального наведения правого борта, блок блокировки цепей старта объектов группового наведения, пульт резервного способа стрельбы объектов индивидуального наведения левого борта, пульт резервного способа стрельбы объектов индивидуального наведения правого борта, пульт резервного способа стрельбы объектов группового наведения, первый блок ввода данных от корабельных систем, второй блок ввода данных от корабельных систем, третий блок ввода данных от корабельных систем, четвертый блок ввода данных от корабельных систем, пятый блок ввода данных от корабельных систем, блок связи со второй интерфейсной сетевой магистралью межпроцессорного обмена, блок управления последовательными радиальными каналами связи, первый последовательный радиальный канал связи, второй последовательный радиальный канал связи, третий последовательный радиальный канал связи, первый блок цифроаналоговых преобразователей, второй блок цифроаналоговых преобразователей, третий блок цифроаналоговых преобразователей, первый блок преобразователей фаза - код, второй блок преобразователей фаза - код, третий блок преобразователей фаза - код, первый блок устройств аналогового ввода-вывода, второй блок устройств аналогового ввода-вывода, третий блок устройств аналогового ввода-вывода, первый блок следящих устройств, второй блок следящих устройств, блок управления шаговыми двигателями, первая сетевая интерфейсная магистраль межпроцессорного обмена, вторая сетевая интерфейсная магистраль межпроцессорного обмена, при этом интерфейсные входы-выходы первого блока связи с сетевой интерфейсной магистралью межпроцессорного обмена, первого процессора, блока управления дисплеем, первого блока дискретного ввода-вывода, первого блока перепрограммируемого постоянного запоминающего устройства объединены между собой посредством первой внутренней интерфейсной магистрали, интерфейсные входы-выходы второго блока связи с сетевой интерфейсной магистралью межпроцессорного обмена, второго процессора, первого, второго и третьего блоков ввода данных от корабельных систем объединены между собой посредством второй внутренней интерфейсной магистрали, интерфейсные входы-выходы третьего блока связи с сетевой интерфейсной магистралью межпроцессорного обмена, блока связи со второй интерфейсной сетевой магистралью межпроцессорного обмена, третьего процессора, четвертого и пятого блоков ввода данных от корабельных систем, блока управления последовательными радиальными каналами связи объединены между собой посредством третьей внутренней интерфейсной магистрали, интерфейсные входы-выходы четвертого блока связи с сетевой интерфейсной магистралью межпроцессорного обмена, первого блока цифроаналоговых преобразователей, первого блока преобразователей фаза - код, четвертого процессора, второго блока дискретного ввода-вывода, второго блока перепрограммируемого постоянного запоминающего устройства объединены между собой посредством четвертой внутренней интерфейсной магистрали, интерфейсные входы-выходы пятого блока связи с сетевой интерфейсной магистралью межпроцессорного обмена, второго блока цифроаналоговых преобразователей, второго блока преобразователей фаза - код, пятого процессора, третьего блока дискретного ввода-вывода, третьего блока перепрограммируемого постоянного запоминающего устройства объединены между собой посредством пятой внутренней интерфейсной магистрали, интерфейсные входы-выходы шестого блока связи с сетевой интерфейсной магистралью межпроцессорного обмена, третьего блока цифроаналоговых преобразователей, третьего блока преобразователей фаза - код, шестого процессора, четвертого блока дискретного ввода-вывода, четвертого блока перепрограммируемого постоянного запоминающего устройства, блока управления шаговыми двигателями объединены между собой посредством шестой внутренней интерфейсной магистрали, сетевые входы-выходы первого, второго и третьего блоков связи с сетевой интерфейсной магистралью межпроцессорного обмена объединены между собой посредством первой сетевой интерфейсной магистрали межпроцессорного обмена, сетевые входы-выходы четвертого, пятого и шестого блоков связи с сетевой интерфейсной магистралью межпроцессорного обмена, а также блока связи со второй интерфейсной сетевой магистралью межпроцессорного обмена объединены между собой посредством второй сетевой интерфейсной магистрали межпроцессорного обмена, к первому входу первого процессора подключен блок клавиатуры, ко второму входу первого процессора подключено координатно-указательное устройство, к выходу блока управления дисплеем подключен дисплей, к выходу первого блока дискретного ввода-вывода подключен блок ключей блокировки цепей старта, выход которого соединен со вторыми входами блоков ключей блокировки цепей старта объектов индивидуального наведения левого борта, объектов индивидуального наведения правого борта и объектов группового наведения соответственно, входы первого, второго и третьего блоков ввода данных от корабельных систем образуют первую группу входов интерфейсов связи с корабельными системами, входы третьего процессора, четвертого и пятого блоков ввода данных от корабельных систем образуют вторую группу входов интерфейсов связи с корабельными системами, к блоку управления последовательными радиальными каналами связи подключены первый, второй и третий последовательные радиальные каналы связи, которые также подключены соответственно к четвертому, пятому и шестому процессорам, выходы второго, третьего и четвертого блоков дискретного ввода-вывода соединены с первыми входами блоков ключей блокировки цепей старта объектов индивидуального наведения левого борта, объектов индивидуального наведения правого борта и объектов группового наведения соответственно, выходы которых образуют группы выходов управления цепями старта объектов индивидуального наведения левого борта, объектов индивидуального наведения правого борта и объектов группового наведения соответственно, входы-выходы второго, третьего и четвертого блоков дискретного ввода-вывода образуют группы дискретных входов-выходов связи с объектами индивидуального наведения левого борта, с объектами индивидуального наведения правого борта и с объектами группового наведения соответственно, выходы пультов резервного способа стрельбы объектов индивидуального наведения левого борта, объектов индивидуального наведения правого борта и объектов группового наведения соединены с третьими входами блоков ключей блокировки цепей старта объектов индивидуального наведения левого борта, объектов индивидуального наведения правого борта и объектов группового наведения соответственно, выходы первого, второго и третьего блоков цифроаналоговых преобразователей соединены со входами соответственно первого, второго и третьего блоков устройств аналогового ввода-вывода, входы первого, второго и третьего блоков преобразователей фаза - код соединены с выходами соответственно первого, второго и третьего блоков устройств аналогового ввода-вывода, первый и второй блоки устройств аналогового ввода-вывода соединены соответственно с первым и вторым блоками следящих устройств, входы-выходы которых образуют группы выходов данных в виде угла поворота вала для связи с объектами индивидуального наведения левого и правого бортов соответственно, входы-выходы третьего блока устройств аналогового ввода-вывода образуют группу аналоговых выходов для связи с пусковыми установками объектов группового наведения, выходы блока управления шаговыми двигателями образуют группу выходов управления шаговыми двигателями объектов группового наведения.
| ПРИСПОСОБЛЕНИЕ ДЛЯ ВОСПЛАМЕНЕНИЯ В ДВИГАТЕЛЯХ ВНУТРЕННЕГО ГОРЕНИЯ | 1925 |
|
SU4395A1 |
| US 5247673 A, 21.09.1993 | |||
| Колосниковая решетка | 1927 |
|
SU6923A1 |
| US 4999766 A, 12.03.1991 | |||
| RU 2053547 C1, 27.01.1996 | |||
| СПОСОБ И УСТАНОВКА ДЛЯ УЛУЧШЕНИЯ ЭКСПЛУАТАЦИОННЫХ ХАРАКТЕРИСТИК И ПЕРЕМЕШИВАНИЯ ПАРА В ЯДЕРНОЙ ЭНЕРГЕТИЧЕСКОЙ СИСТЕМЕ | 1995 |
|
RU2140589C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 1991 |
|
RU2042193C1 |

