Изобретение относится к информационно-управляющим системам и предназначено для сбора информации, решения боевых задач и выработки сигналов управления системами вооружения и техническими средствами, в частности корабельным оружием.
Известна микропроцессорная система [1], содержащая несколько микроЭВМ с индивидуальными устройствами памяти и несколько общих устройств памяти, каждое из которых связано с двумя микроЭВМ. При работе с индивидуальной памятью микроЭВМ могут выполнять программы независимо друг от друга. Для обмена информацией между микроЭВМ используются общие запоминающие устройства.
К недостаткам данной системы следует отнести отсутствие возможности обмена данными непосредственно между индивидуальными запоминающими устройствами микроЭВМ, а также ограниченное количество подключаемых микроЭВМ к одному общему запоминающему устройству, что снижает производительность обмена информацией в системе.
Известна микропроцессорная система [2], состоящая из нескольких автономных микропроцессоров, соединенных посредством системной шины с общей внешней памятью. Обмен информацией между микропроцессорами осуществляется через общую память. Доступ автономных микропроцессоров к общей памяти обеспечивается распределителем системной шины. Такая организация системы предпочтительнее предыдущей, так как все микропроцессоры имеют одинаковые возможности при использовании общей памяти.
Основным недостатком этой системы является отсутствие возможности непосредственного обмена информацией между микропроцессорами, что снижает производительность системы.
Известна мультипроцессорная система [3], которая содержит микропроцессоры, соединенные двухсторонними связями через устройство сопряжения с устройством памяти, и устройство распределения ресурсов, выполняющее функции системного диспетчера.
Недостатком данной системы является то, что устройство распределения ресурсов обеспечивает диспетчирование лишь жестко связанных подзадач без учета прерываний вычислений, например, по вводу/выводу.
Известна мультимикропроцессорная система [4], содержащая n исполнительных микропроцессорных блоков, микропроцессорные блоки ввода-вывода, запоминающее устройство, устройство связи с памятью, блок коммутации и генератор тактовых импульсов, при этом информационный вход-выход, адресный и управляющие входы запоминающего устройства связаны соответственно с информационным входом-выходом, адресным и первыми управляющими входами каждого микропроцессорного блока, а также с информационным входом, адресным и первыми управляющими выходами устройства связи с памятью. Синхронизация работы элементов системы осуществляется по сигналам с генератора тактовых импульсов.
Недостатком данной системы является отсутствие тестового контроля и контроля правильности функционирования входящих в ее состав устройств, а также сложность управления вычислительным процессом системы.
Известна также многопроцессорная корабельная управляющая вычислительная система [5] , являющаяся по технической сущности наиболее близкой к предлагаемой системе. Система-прототип содержит микропроцессоры и внешнее оперативное запоминающее устройство (первое оперативное запоминающее устройство), связанные портами ввода/вывода с первой интерфейсной магистралью, блоки ввода информации, связанные посредством второй интерфейсной магистрали со вторым портом ввода/вывода третьего микропроцессора, генератор тактовых импульсов, подключенный выходом к входам синхронизации всех микропроцессоров, и коммутатор, подключенный входами к выходам блока вывода информации, связанного портом ввода/вывода посредством четвертой интерфейсной магистрали со вторым портом ввода/вывода четвертого микропроцессора. Система содержит также адаптер, связанный портом ввода/вывода посредством третьей интерфейсной магистрали с портом ввода/вывода пульта управления и со вторым портом ввода/вывода второго микропроцессора, второе внешнее запоминающее устройство (первое долговременное запоминающее устройство), связанное шиной обмена с соответствующим входом/выходом второго микропроцессора, а также первый и второй формирователи-распределители управляющих сигналов, подключенные соответственно к первой и второй группам выходов коммутатора. При этом контрольные входы и контрольные выходы всех микропроцессоров соединены соответственно с выходом и с первым входом адаптера, второй управляемый вход которого подключен к четвертому выходу пульта управления, первый, второй и третий управляющие выходы которого соединены с управляемыми входами соответственно коммутатора и обоих формирователей-распределителей управляющих сигналов, причем первый управляющий выход пульта управления подключен также и к управляющему входу первого микропроцессора. Пульт управления содержит клавиатуру (основную клавиатуру) и видеоиндикатор (первое устройство отображения графической информации).
Задачей изобретения является создание корабельной управляющей вычислительной системы, обладающей универсальностью, более широкими функциональными возможностями, повышенной надежностью функционирования и отказоустойчивостью.
Сущность изобретения заключается в том, что многопроцессорная корабельная управляющая вычислительная система, содержащая первое устройство отображения графической информации, первую клавиатуру и первое долговременное запоминающее устройство (ДЗУ), дополнительно содержит объединенные соответствующими связями первый адаптер интерфейса долговременных запоминающих устройств, второе устройство отображения графической информации, первый адаптер устройства отображения графической информации, первый адаптер дискретного ввода-вывода, первую электронно-вычислительную машину (ЭВМ), первый адаптер локальной сети (ЛС), первый оптоизолированный преобразователь последовательного интерфейса (ОППИ), второй ОППИ, третий ОППИ, четвертый ОППИ, адаптер последовательных интерфейсов, адаптер последовательного интерфейса связи с лагом, второй адаптер дискретного ввода-вывода, первый адаптер мультиплексных каналов, пятый ОППИ, вторую ЭВМ, второй адаптер ЛС, шестой ОППИ, седьмой ОППИ, третью ЭВМ, восьмой ОППИ, девятый ОППИ, адаптер синхронных последовательных интерфейсов, второй адаптер мультиплексных каналов, второе ДЗУ, второй адаптер интерфейса ДЗУ, третий адаптер ЛС, второй адаптер устройства отображения графической информации, четвертую ЭВМ, четвертый адаптер ЛС, пятый адаптер ЛС, шестой адаптер ЛС, десятый ОППИ, пятую ЭВМ, третье ДЗУ, третий адаптер интерфейса ДЗУ, первый цифроаналоговый преобразователь (ЦАП), микроконтроллер, первый многоканальный преобразователь фаза-код (МПФК), третий адаптер дискретного ввода-вывода, первый блок буферных усилителей сигналов релейного обмена (БУСРО), второй блок БУСРО, третий блок БУСРО, четвертый блок БУСРО, четвертый адаптер дискретного ввода-вывода, седьмой адаптер ЛС, одиннадцатый ОППИ, шестую ЭВМ, четвертое ДЗУ, четвертый адаптер интерфейса ДЗУ, второй ЦАП, второй МПФК, третий МПФК, четвертый МПФК, пятый адаптер дискретного ввода-вывода, пятый блок БУСРО, шестой адаптер дискретного ввода-вывода, восьмой адаптер ЛС, седьмую ЭВМ, двенадцатый ОППИ, пятое ДЗУ, пятый адаптер интерфейса ДЗУ, третий ЦАП, пятый МПФК, шестой МПФК, седьмой МПФК, седьмой адаптер дискретного ввода-вывода, шестой блок БУСРО, восьмой адаптер дискретного ввода-вывода, вторую клавиатуру, координатно-указательное устройство, блок устройств ввода команд, блок устройств индикации, устройство объединения сигналов клавиатур, коммутатор сигналов клавиатуры, коммутатор сигналов координатно-указательного устройства, первую магистраль информационного обмена ЛС, вторую магистраль информационного обмена ЛС, первую системную интерфейсную магистраль (СИМ), вторую СИМ, третью СИМ, четвертую СИМ, пятую СИМ, шестую СИМ, седьмую СИМ.
Сущность изобретения поясняется чертежом, на котором обозначены:
1 - первое устройство отображения графической информации;
2 - первая клавиатура;
3 - первое ДЗУ;
4 - первый адаптер интерфейса ДЗУ;
5 - второе устройство отображения графической информации;
6 - первый адаптер устройства отображения графической информации;
7 - первый адаптер дискретного ввода-вывода;
8 - первая ЭВМ;
9 - первый адаптер ЛС;
10 - первый ОППИ;
11 - второй ОППИ;
12 - третий ОППИ;
13 - четвертый ОППИ;
14 - адаптер последовательных интерфейсов;
15 - адаптер последовательного интерфейса связи с лагом;
16 - второй адаптер дискретного ввода-вывода;
17 - первый адаптер мультиплексных каналов;
18 - пятый ОППИ;
19 - вторая ЭВМ;
20 - второй адаптер ЛС;
21 - шестой ОППИ;
22 - седьмой ОППИ;
23 - третья ЭВМ;
24 - восьмой ОППИ;
25 - девятый ОППИ;
26 - адаптер синхронных последовательных интерфейсов;
27 - второй адаптер мультиплексных каналов;
28 - второе ДЗУ;
29 - второй адаптер интерфейса ДЗУ;
30 - третий адаптер ЛС;
31 - второй адаптер устройства отображения графической информации;
32 - четвертая ЭВМ;
33 - четвертый адаптер ЛС;
34 - пятый адаптер ЛС;
35 - шестой адаптер ЛС;
36 - десятый ОППИ;
37 - пятая ЭВМ;
38 - третье ДЗУ;
39 - третий адаптер интерфейса ДЗУ;
40 - первый ЦАП;
41 - микроконтроллер;
42 - первый МПФК;
43 - третий адаптер дискретного ввода-вывода;
44 - первый блок БУСРО;
45 - второй блок БУСРО;
46 - третий блок БУСРО;
47 - четвертый блок БУСРО;
48 - четвертый адаптер дискретного ввода-вывода;
49 - седьмой адаптер ЛС;
50 - одиннадцатый ОППИ;
51 - шестая ЭВМ;
52 - четвертое ДЗУ;
53 - четвертый адаптер интерфейса ДЗУ;
54 - второй ЦАП;
55 - второй МПФК;
56 - третий МПФК;
57 - четвертый МПФК;
58 - пятый адаптер дискретного ввода-вывода;
59 - пятый блок БУСРО;
60 - шестой адаптер дискретного ввода-вывода;
61 - восьмой адаптер ЛС;
62 - двенадцатый ОППИ;
63 - седьмая ЭВМ;
64 - пятое ДЗУ;
65 - пятый адаптер интерфейса ДЭУ;
66 - третий ЦАП;
67 - пятый МПФК;
68 - шестой МПФК;
69 - седьмой МПФК;
70 - седьмой адаптер дискретного ввода-вывода;
71 - шестой блок БУСРО;
72 - восьмой адаптер дискретного ввода-вывода;
73 - вторая клавиатура;
74 - координатно-указательное устройство;
75 - блок устройств ввода команд;
76 - блок устройств индикации;
77 - устройство объединения сигналов клавиатур;
78 - коммутатор сигналов клавиатуры;
79 - коммутатор сигналов координатно-указательного устройства;
80 - первая магистраль информационного обмена ЛС;
81 - вторая магистраль информационного обмена ЛС;
82 - первая СИМ;
83 - вторая СИМ;
84 - третья СИМ;
85 - четвертая СИМ;
86 - пятая СИМ;
87 - шестая СИМ;
88 - седьмая СИМ;
89 - первый вход сигналов состояния объектов индивидуального наведения (ОИН);
90 - второй вход сигналов состояния ОИН;
91 - первый вход данных боевой информационно-управляющей системы;
92 - второй вход данных боевой информационно-управляющей системы;
93 - первый вход данных радиолокационного комплекса (РЛК);
94 - второй вход данных РЛК;
95 - вход данных лага;
96 - третий вход данных РЛК;
97 - четвертый вход данных РЛК;
98 - вход данных первой гидроакустической станции;
99 - вход данных второй гидроакустической станции;
100 - первый вход данных навигационного комплекса;
101 - второй вход данных навигационного комплекса;
102 - выход сигналов управления шаговым двигателем;
103 - выход сигналов управления устройствами ввода данных объектов группового наведения (ОГН);
104 - вход сигналов датчиков углов поворота валов ввода данных ОГН;
105 - первый выход команд ОГН;
106 - второй выход команд ОГН;
107 - третий выход команд ОГН;
108 - четвертый выход команд ОГН;
109 - выход сигналов управления устройствами ввода данных ОИН левого борта;
110 - первый вход сигналов датчиков углов поворота валов ввода данных ОИН левого борта;
111 - второй вход сигналов датчиков углов поворота валов ввода данных ОИН левого борта;
112 - третий вход сигналов датчиков углов поворота валов ввода данных ОИН левого борта;
113 - выход команд объектам индивидуального наведения левого борта;
114 - выход сигналов управления устройствами ввода данных ОИН правого борта;
115 - первый вход сигналов датчиков углов поворота валов ввода данных ОИН правого борта;
116 - второй вход сигналов датчиков углов поворота валов ввода данных ОИН правого борта;
117 - третий вход сигналов датчиков углов поворота валов ввода данных ОИН правого борта;
118 - выход команд объектам индивидуального наведения правого борта.
В предлагаемой многопроцессорной корабельной управляющей вычислительной системе:
Интерфейсные входы-выходы первого адаптера 4 интерфейса ДЗУ, первого адаптера 6 устройства отображения графической информации, первого адаптера 7 дискретного ввода-вывода, первой ЭВМ 8, первого адаптера 9 ЛС соединены между собой посредством первой СИМ 82.
Интерфейсные входы-выходы адаптера 14 последовательных интерфейсов, второго адаптера 16 дискретного ввода-вывода, первого адаптера 17 мультиплексных каналов, второй ЭВМ 19, второго адаптера 20 ЛС соединены между собой посредством второй СИМ 83.
Интерфейсные входы-выходы третьей ЭВМ 23, адаптера 26 синхронных последовательных интерфейсов, второго адаптера 27 мультиплексных каналов, второго адаптера 29 интерфейса ДЗУ, третьего адаптера 30 ЛС соединены между собой посредством третьей СИМ 84.
Интерфейсные входы-выходы второго адаптера 31 устройства отображения графической информации, четвертой ЭВМ 32, четвертого адаптера 33 ЛС, пятого адаптера 34 ЛС соединены между собой посредством четвертой СИМ 85.
Интерфейсные входы-выходы шестого адаптера 35 ЛС, пятой ЭВМ 37, третьего адаптера 39 интерфейса ДЗУ, первого ЦАП 40, третьего адаптера 43 дискретного ввода-вывода, четвертого адаптера 48 дискретного ввода-вывода соединены между собой посредством пятой СИМ 86.
Интерфейсные входы-выходы седьмого адаптера 49 ЛС, шестой ЭВМ 51, четвертого адаптера 53 интерфейса ДЗУ, второго ЦАП 54, пятого адаптера 58 дискретного ввода-вывода, шестого адаптера 60 дискретного ввода-вывода соединены между собой посредством шестой СИМ 87.
Интерфейсные входы-выходы восьмого адаптера 61 ЛС, седьмой ЭВМ 63, пятого адаптера 65 интерфейса ДЗУ, третьего ЦАП 66, седьмого адаптера 70 дискретного ввода-вывода, восьмого адаптера 72 дискретного ввода-вывода соединены между собой посредством седьмой СИМ 88.
Все ЭВМ выполнены с использованием микропроцессоров.
Сетевые входы-выходы первого, второго, третьего, пятого адаптеров 9, 20, 30, 34 ЛС соединены между собой посредством первой магистрали 80 информационного обмена ЛС, сетевые входы-выходы четвертого, шестого, седьмого, восьмого адаптеров 33, 35, 49, 61 ЛС соединены между собой посредством второй магистрали 81 информационного обмена ЛС.
К выходу первого адаптера 6 устройства отображения графической информации подключено первое устройство 1 отображения графической информации, первое ДЗУ 3 подключено к входу-выходу интерфейса ДЗУ первого адаптера 4 интерфейса ДЗУ, первая группа выходов первого адаптера 7 дискретного ввода-вывода соединена с управляющими входами коммутатора 78 сигналов клавиатуры, вторая группа выходов первого адаптера 7 дискретного ввода-вывода соединена с управляющими входами коммутатора 79 сигналов координатно-указательного устройства.
К третьей группе выходов первого адаптера 7 дискретного ввода-вывода подключен блок 76 устройств индикации.
Блок 76 устройств индикации представляет собой набор различных лампочек, светодиодов, светящихся табло и т.п. элементов индикации.
Первая группа и вторая группы входов первого адаптера 7 дискретного ввода-вывода образуют соответственно первый и второй входы 89 и 90 сигналов состояния ОИН.
К третьей группе входов первого адаптера 7 дискретного ввода-вывода подключен блок 75 устройств ввода команд, который может быть выполнен в виде набора кнопок и переключателей, предназначенных для выдачи команд ОГН и ОИН (команд подготовки, пуска и т.д.).
Первый вход первой ЭВМ 8 является входом сигналов клавиатуры и соединен с первым выходом коммутатора 78 сигналов клавиатуры.
Второй вход первой ЭВМ 8 является входом последовательного интерфейса и соединен с первым выходом коммутатора 79 сигналов координатно-указательного устройства.
К первому, второму, третьему, четвертому входам-выходам последовательных интерфейсов адаптера 14 последовательных интерфейсов подключены соответственно первый, второй, третий, четвертый ОППИ 10, 11, 12, 13, оптоизолированные входы-выходы последовательных интерфейсов которых образуют соответственно первый вход 91 данных боевой информационно-управляющей системы, второй вход 92 данных боевой информационно-управляющей системы, первый вход 93 данных РЛК, второй вход 94 данных РЛК.
К входам-выходам второго адаптера 16 дискретного ввода-вывода подключен адаптер 15 последовательного интерфейса связи с лагом, вход которого является входом 95 данных лага.
Первый и второй входы-выходы первого адаптера 17 мультиплексных каналов образуют соответственно третий и четвертый входы 96 и 97 данных РЛК.
К входу-выходу последовательного интерфейса второй ЭВМ 19 подключен пятый ОППИ 18.
К первому и второму входам-выходам последовательных интерфейсов третьей ЭВМ 23 подключены соответственно шестой и седьмой ОППИ 21 и 22.
К первому и второму входам-выходам синхронных последовательных интерфейсов адаптера 26 синхронных последовательных интерфейсов подключены соответственно восьмой и девятый ОППИ 24 и 25, оптоизолированные входы-выходы которых образуют соответственно вход 98 данных первой гидроакустической станции и вход 99 данных второй гидроакустической станции.
Первый и второй входы-выходы второго адаптера 27 мультиплексных каналов образуют соответственно первый и второй входы 100 и 101 данных навигационного комплекса.
Второе ДЗУ 28 подключено к входу-выходу интерфейса ДЗУ второго адаптера 29 интерфейса ДЗУ.
К выходу второго адаптера 31 устройства отображения графической информации подключено второе устройство 5 отображения графической информации.
Первое и второе устройства 1 и 5 отображения информации могут быть выполнены, например, в виде цветных жидкокристаллических матриц.
Первый вход четвертой ЭВМ 32 является входом сигналов клавиатуры и соединен со вторым выходом коммутатора 78 сигналов клавиатуры.
Второй вход четвертой ЭВМ 32 является входом последовательного интерфейса и соединен со вторым выходом коммутатора 79 сигналов координатно-указательного устройства.
К первому входу-выходу последовательного интерфейса пятой ЭВМ 37 подключен десятый ОППИ 36, ко второму входу-выходу последовательного интерфейса пятой ЭВМ 37 подключен микроконтроллер 41, выход которого является выходом 102 сигналов управления шаговым двигателем.
Третье ДЗУ 38 подключено к входу-выходу интерфейса ДЗУ третьего адаптера 39 интерфейса ДЗУ.
Выход первого ЦАП 40 является выходом 103 сигналов управления устройствами ввода данных ОГН.
К входам-выходам третьего адаптера 43 дискретного ввода-вывода подключен первый МПФК 42, многоканальный вход которого является входом 104 сигналов датчиков углов поворота валов ввода данных ОГН.
К первой, второй, третьей, четвертой группам выходов четвертого адаптера 48 дискретного ввода-вывода подключены соответственно первый, второй, третий, четвертый блоки 44, 45, 46, 47 БУСРО, выходы которых являются соответственно первым, вторым, третьим, четвертым выходами 105, 106, 107, 108 команд объектам группового наведения (ОГН).
К входу-выходу последовательного интерфейса шестой ЭВМ 51 подключен одиннадцатый ОППИ 50.
Четвертое ДЗУ 52 подключено к входу-выходу интерфейса ДЗУ четвертого адаптера 53 интерфейса ДЗУ.
Выход второго ЦАП 54 является выходом 109 сигналов управления устройствами ввода данных в виде углов поворота валов ввода данных ОИН левого борта.
К первой, второй, третьей группам входов пятого адаптера 58 дискретного ввода-вывода подключены соответственно второй, третий, четвертый МПФК 55, 56, 57, входы которых являются соответственно первым, вторым, третьим входами 110, 111, 112 сигналов датчиков углов поворота валов ввода данных ОИН левого борта.
К выходам шестого адаптера 60 дискретного ввода-вывода подключен пятый блок 59 БУСРО, выход которого является выходом 113 команд объектам индивидуального наведения левого борта.
К входу-выходу последовательного интерфейса седьмой ЭВМ 63 подключен двенадцатый ОППИ 62.
Пятое ДЗУ 64 подключено к входу-выходу интерфейса ДЗУ пятого адаптера 65 интерфейса ДЗУ.
Выход третьего ЦАП 66 является выходом 114 сигналов управления устройствами ввода данных ОИН правого борта.
К первой, второй, третьей группам входов седьмого адаптера 70 дискретного ввода-вывода подключены соответственно пятый, шестой, седьмой МПФК 67, 68, 69, входы которых являются соответственно первым, вторым, третьим входами 115, 116, 117 сигналов датчиков углов поворота валов ввода данных ОИН правого борта.
К выходам восьмого адаптера 72 дискретного ввода-вывода подключен шестой блок 71 БУСРО, выход которого является выходом 118 команд объектам индивидуального наведения правого борта.
Оптоизолированный вход-выход пятого ОППИ 18 соединен с оптоизолированным входом-выходом десятого ОППИ 36.
Оптоизолированный вход-выход шестого ОППИ 21 соединен с оптоизолированным входом-выходом одиннадцатого ОППИ 50.
Оптоизолированный вход-выход седьмого ОППИ 22 соединен с оптоизолированным входом-выходом двенадцатого ОППИ 62.
К первому и второму входам устройства 77 объединения сигналов клавиатур подключены соответственно первая и вторая клавиатуры 2 и 73. Устройство 77 объединения сигналов клавиатур представляет собой устройство, на выход которого передаются сигналы первой клавиатуры 2 или второй клавиатуры 73. Выход устройства 77 объединения сигналов клавиатур соединен со входом коммутатора 78 сигналов клавиатуры, выход координатно-указательного устройства 74 соединен со входом коммутатора 79 сигналов координатно-указательного устройства.
В качестве координатно-указательного устройства 74 могут быть использованы манипуляторы типа "Мышь", "Trackball" и так далее.
Первая ЭВМ 8 осуществляет прием данных от первой и второй клавиатур 2 и 73, осуществляет по последовательным интерфейсам прием данных координатно-указательного устройства 74, а также при помощи первого адаптера 7 дискретного ввода-вывода осуществляет прием данных о состоянии ОИН с первого и второго входов 89 и 90 сигналов состояния ОИН, прием данных с блока 75 устройств ввода команд, выдачу данных на блок 76 устройств индикации, выдачу управляющих сигналов на управляющие входы коммутатора 78 сигналов клавиатуры и коммутатора 79 сигналов координатно-указательного устройства, а также осуществляет формирование графических данных, предназначенных для вывода на первое устройство 1 отображения графической информации при помощи первого адаптера 6 устройства отображения графической информации.
Вторая ЭВМ 19 осуществляет при помощи адаптера 14 последовательных интерфейсов прием данных по последовательным интерфейсам от боевой информационно-управляющей системы с первого и второго входов 91 и 92 данных боевой информационно-управляющей системы, данных РЛК с первого и второго входов 93 и 94 данных РЛК, прием при помощи первого адаптера 17 мультиплексных каналов с третьего и четвертого входов 96 и 97 данных РЛК, прием данных лага при помощи адаптера 15 последовательного интерфейса связи с лагом и второго адаптера 16 дискретного ввода-вывода, а также осуществляет обмен информацией по последовательному интерфейсу с пятой ЭВМ 37.
Третья ЭВМ 23 осуществляет прием данных по синхронным последовательным интерфейсам при помощи адаптера 26 синхронных последовательных интерфейсов с входов 98 и 99 данных первой и второй гидроакустических станций, осуществляет прием данных по мультиплексным каналам с первого и второго входов 100 и 101 данных навигационного комплекса, а также осуществляет обмен данными по последовательным интерфейсам с шестой и седьмой ЭВМ 51 и 63.
Четвертая ЭВМ 32 осуществляет прием данных от первой и второй клавиатур 2 и 73, осуществляет по последовательным интерфейсам прием данных координатно-указательного устройства 74, а также осуществляет формирование графических данных, предназначенных для вывода на второе устройство 5 отображения графической информации при помощи второго адаптера 31 устройства отображения графической информации, а также при помощи четвертого и пятого адаптеров 33 и 34 ЛС обеспечивает связь первой и второй магистралей 80 и 81 информационного обмена ЛС.
Пятая ЭВМ 37 служит для управления ОГН. Управляющие команды выдаются при помощи четвертого адаптера 48 дискретного ввода-вывода на первый, второй, третий, четвертый выходы 105, 106, 107, 108 команд ОГН. Данные в ОГН вводятся в виде углов поворота валов ввода данных. Углы поворота валов ввода данных ОГН задаются сигналами с выхода 103 системы. Углы поворота валов ввода данных ОГН контролируются датчиками углов поворота валов ввода данных, сигналы с которых с входа 104 поступают на вход первого МПФК 42 и при помощи третьего адаптера 43 дискретного ввода-вывода данные об углах поворота валов ввода данных ОГН передаются в пятую ЭВМ 37. Микроконтроллер 41 обеспечивает выдачу сигналов управления шаговым двигателем через выход 102 сигналов управления шаговым двигателем. Микроконтроллер 41 управляется пятой ЭВМ 37 по последовательному интерфейсу.
Шестая ЭВМ 51 служит для управления ОИН левого борта. Управляющие команды выдаются при помощи шестого адаптера 60 дискретного ввода-вывода на выход 113 команд ОИН левого борта. Данные в ОИН левого борта вводятся в виде углов поворота валов ввода данных. Углы поворота валов ввода данных ОИН левого борта задаются сигналами с выхода 109 сигналов управления устройствами ввода данных, поступающими со второго ЦАП 54. Углы поворота валов ввода данных ОИН левого борта контролируются датчиками углов поворота валов ввода данных, сигналы с которых поступают на входы второго, третьего, четвертого МПФК 55, 56, 57, и при помощи пятого адаптера 58 дискретного ввода-вывода данные об углах поворота валов ввода данных ОИН левого борта передаются в шестую ЭВМ 51.
Седьмая ЭВМ 63 служит для управления ОИН правого борта. Управляющие команды выдаются при помощи восьмого адаптера 72 дискретного ввода-вывода на выход 118 команд ОИН правого борта. Данные в ОИН правого борта вводятся в виде углов поворота валов ввода данных, которые задаются при помощи устройств ввода данных сигналами, поступающими с третьего ЦАП 66. Углы поворота валов ввода данных ОИН правого борта контролируются датчиками углов поворота валов ввода данных, сигналы с которых поступают на входы пятого, шестого, седьмого МПФК 67, 68, 69, и при помощи седьмого адаптера 70 дискретного ввода-вывода данные об углах поворота валов ввода данных ОИН правого борта передаются в седьмую ЭВМ 63.
Устройство 77 объединения сигналов клавиатур принимает сигналы от первой и второй клавиатур 2 и 73 и передает сигналы одной из клавиатур на вход коммутатора сигналов клавиатуры 78, что позволяет для ввода данных в многопроцессорную корабельную управляющую вычислительную систему использовать одновременно и первую и вторую клавиатуры 2 и 73.
Коммутатор 78 сигналов клавиатуры позволяет подавать сигналы клавиатуры (первой и второй клавиатуры 2 и 73) с выхода устройства 77 объединения сигналов клавиатур или в первую ЭВМ 8 или в четвертую ЭВМ 32.
Коммутатор 79 сигналов координатно-указательного устройства позволяет подавать сигналы координатно-указательного устройства 74 или в первую ЭВМ 8 или в четвертую ЭВМ 32.
Первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый ОППИ 10, 11, 12, 13, 18, 21, 22, 24, 25, 36, 50, 62 обеспечивают гальваническую развязку цепей вычислительных устройств (ЭВМ, адаптеров последовательных интерфейсов) и линий последовательных интерфейсов.
Первый, второй, третий, четвертый, пятый, шестой блоки 44, 45, 46, 47, 59, 71 БУСРО обеспечивают гальваническую развязку цепей вычислительных устройств (ЭВМ, адаптеров последовательных интерфейсов) и линий дискретного ввода-вывода.
Первая магистраль 80 информационного обмена ЛС служит для обеспечения обмена информацией между первой, второй, третьей, четвертой ЭВМ 8, 19, 23, 32.
Вторая магистраль 81 информационного обмена ЛС служит для обеспечения обмена информацией между пятой, шестой, седьмой ЭВМ 37, 51, 63.
Многопроцессорная корабельная управляющая вычислительная система работает следующим образом.
После включения питания и выполнения первой, второй, третьей, четвертой, пятой, шестой и седьмой ЭВМ 8, 19, 23, 32, 37, 51, 63 процедур самотестирования и процедур тестирования подключенных к ним устройств многопроцессорная корабельная управляющая вычислительная система начинает принимать данные о состоянии корабельных систем, оружия, тактической обстановке от корабельных систем-источников информации (систем ОИН, ОГН, боевой информационно-управляющей системы, РЛК, навигационного комплекса, первого и второго гидроакустических комплексов), а также команды и данные, вводимые пользователем при помощи первой и второй клавиатур 2 и 73, координатно-указательного устройства 74 и блока 75 устройств ввода команд. Полученные данные при помощи первой магистрали 80 информационного обмена ЛС поступают в первую и четвертую ЭВМ 8 и 32 и отображаются на первом и втором устройствах 1 и 5 отображения графической информации. Пользователь на основании представленных данных принимает решение о применении ОГН и/или ОИН правого и левого бортов и при помощи первой и второй клавиатур 2 и 73, координатно-указательного устройства 74 и блока 75 устройств ввода команд вводит данные и команды, необходимые для выполнения подготовки и применения оружия (команды о начале различных этапов подготовки, команды на выдачу целеуказания в ОГН и ОИН, данные целеуказания, полученные пользователем от других источников, команды на применение оружия и т.д.). Эти данные и команды при помощи первой магистрали 80 информационного обмена ЛС передаются в четвертую ЭВМ 32, которая выдает их на вторую магистраль 81 информационного обмена ЛС, при помощи которой данные и команды передаются в пятую, шестую, седьмую ЭВМ 37, 51, 63.
Пятая ЭВМ 37 выдает управляющие команды (для обеспечения подготовки оружия) при помощи четвертого адаптера 48 дискретного ввода-вывода на первый, второй, третий, четвертый выходы 105, 106, 107, 108 команд ОГН. А также пятая ЭВМ 37 осуществляет ввод данных (данных целеуказания) в ОГН в виде углов поворота валов ввода данных. Установку угла поворота валов ввода данных ОГН осуществляют устройства ввода данных в виде угла поворота вала ввода данных, которые управляются сигналами с выхода 103 сигналов управления устройствами ввода данных в виде угла поворота вала ввода данных ОГН, поступающими с первого ЦАП 40. Угол поворота вала ввода данных ОГН контролируется датчиком угла поворота вала ввода данных, сигналы с которого с входа 104 сигнала датчика угла поворота вала ввода данных ОГН на вход первого МПФК 42 и при помощи третьего адаптера 43 дискретного ввода-вывода данных об угле поворота вала ввода данных ОГН передаются в пятую ЭВМ 37. Микроконтроллер 41 обеспечивает выдачу сигналов управления шаговым двигателем через выход 102 сигналов управления шаговым двигателем. Микроконтроллер 41 управляется пятой ЭВМ 37 по последовательному интерфейсу. После получения подтверждения пользователя на первый, второй, третий, четвертый выходы 105, 106, 107, 108 команд ОГН выдаются команды на пуск и происходит пуск ОГН.
Шестая ЭВМ 51 выдает управляющие команды при помощи шестого адаптера 60 дискретного ввода-вывода на выход 113 команд ОИН левого борта. Также шестая ЭВМ 51 осуществляет ввод данных (данных целеуказания) в ОИН левого борта в виде углов поворота валов ввода данных. Установка углов поворота валов ввода данных ОИН левого борта производится при помощи устройств ввода данных в виде углов поворота валов ввода данных, которые управляются сигналами с выхода 109 сигналов управления устройствами ввода данных ОИН левого борта, поступающими со второго ЦАП 54. Углы поворота валов ввода данных ОИН левого борта контролируются датчиками углов поворота валов ввода данных, сигналы с которых поступают на входы МПФК 55, 56, 57, и при помощи пятого адаптера 58 дискретного ввода-вывода данные об углах поворота валов ввода данных ОИН левого борта передаются в шестую ЭВМ 51. После получения подтверждения пользователя на выход 113 команд ОИН левого борта выдаются команды на пуск и происходит пуск ОИН левого борта.
Аналогично, седьмая ЭВМ 63 выдает управляющие команды, осуществляет ввод данных (данных целеуказания) и выдает команды на пуск ОИН правого борта.
Использование двух одинаковых магистралей 80 и 80 информационного обмена локальной сети увеличивает отказоустойчивость системы. При выходе из строя одной из магистралей информационного обмена локальной сети или подключенных к этой магистрали адаптеров локальной сети обмен информации осуществляется через другую магистраль информационного обмена и подключенные к ней адаптеры локальной сети.
Таким образом, предлагаемая корабельная управляющая вычислительная система обладает универсальностью, более широкими функциональными возможностями и повышенной надежностью функционирования и отказоустойчивостью. Корабельная управляющая вычислительная система позволяет наращивать функциональные возможности за счет увеличения емкости и числа ДЗУ, подключения дополнительных ЭВМ и дополнительных адаптеров.
Представленные чертежи и описание системы позволяют, используя существующую элементную базу, изготовить систему промышленным способом и использовать для сбора информации, решения боевых задач и выработки сигналов управления системами вооружения и техническими средствами, что характеризует предлагаемое изобретение как промышленно применимое.
Источники информации
1. Пат. США N 4065809, кл. G 06 F 15/16, 1977 г.
2. Пат. США N 3959775, кл. G 06 F 15/16, 1976 г.
3. А.С. СССР N 742943, кл. G 06 F 15/16, 1980 г.
4. А.С. СССР N 907551, кл. G 06 F 15/16, 1982 г.
5. Свид. РФ N 4395 на ПМ, кл. G 06 F 15/16, 1996 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА РАДИОЛОКАЦИОННОЙ СТАНЦИИ ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2177171C1 |
| УНИФИЦИРОВАННЫЙ ПУЛЬТОВОЙ ПРИБОР | 2004 |
|
RU2276401C2 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА КОРАБЕЛЬНОГО КОМПЛЕКСА УПРАВЛЕНИЯ ОРУЖИЕМ | 2004 |
|
RU2273046C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2191430C1 |
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА КОРАБЕЛЬНОГО КОМПЛЕКСА РАДИОЭЛЕКТРОННОГО ПРОТИВОДЕЙСТВИЯ | 2001 |
|
RU2209463C2 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2000 |
|
RU2169943C1 |
| МНОГОПРОЦЕССОРНАЯ КОРАБЕЛЬНАЯ УПРАВЛЯЮЩАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА "ЛАХНА" | 1998 |
|
RU2147379C1 |
| КОМАНДНО-СТРЕЛЬБОВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА БЕРЕГОВОГО БАЗИРОВАНИЯ | 2000 |
|
RU2176818C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА КОРАБЕЛЬНОЙ БОЕВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕЙ СИСТЕМЫ ИЛИ БОЕВОЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩЕЙ СИСТЕМЫ БЕРЕГОВОГО БАЗИРОВАНИЯ | 2001 |
|
RU2183856C1 |
| КОРАБЕЛЬНАЯ БОЕВАЯ ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА | 2001 |
|
RU2186421C1 |
Изобретение относится к информационно-управляющим системам и предназначено для сбора информации и выработки сигналов управления системами вооружения и техническими средствами, в частности корабельным оружием. Техническим результатом является расширение функциональных возможностей. Система содержит два устройства отображения графической информации, две клавиатуры, пять долговременных запоминающих устройств, шесть ЭВМ, двенадцать оптоизолированных преобразователей последовательного интерфейса, три цифроаналоговых преобразователя, микроконтроллер, семь многоканальных преобразователей фаза-код, шесть блоков буферных усилителей сигналов релейного обмена, координатно-указательное устройство, блок устройств ввода команд, блок устройств индикации, устройство объединения сигналов клавиатур, коммутаторы сигналов клавиатур и сигналов координатно-указательного устройства, адаптеры. 1 ил.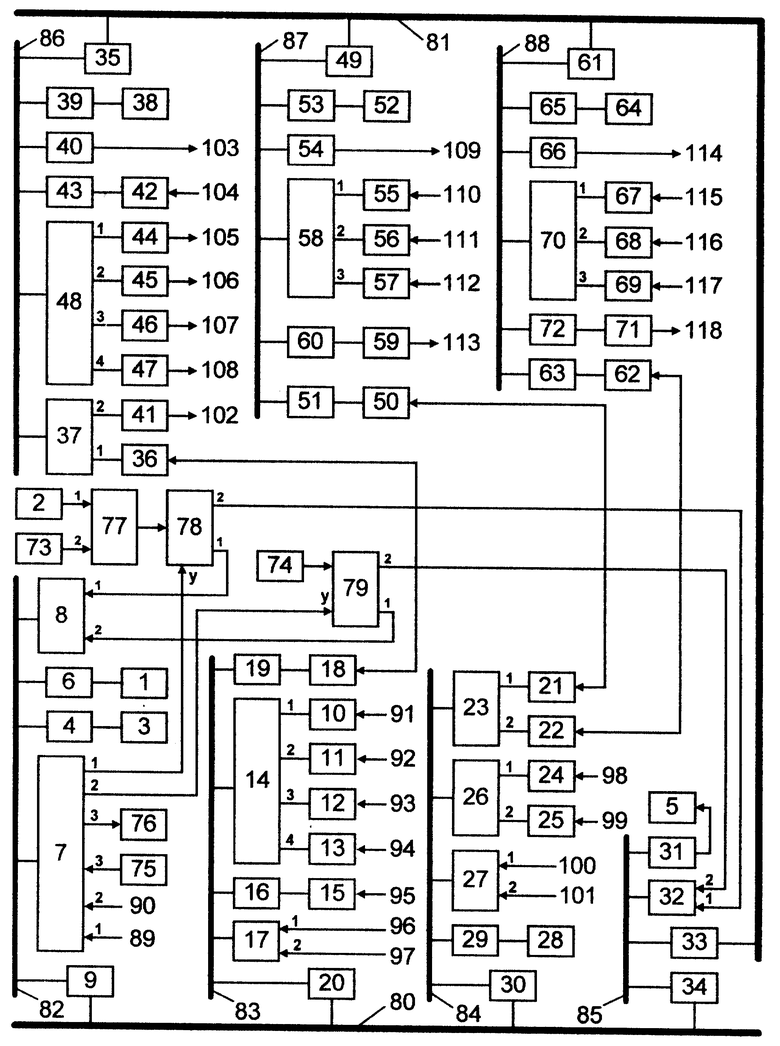
Многопроцессорная корабельная управляющая вычислительная система, содержащая первое устройство отображения графической информации, первую клавиатуру, первое долговременное запоминающее устройство (ДЗУ), отличающаяся тем, что она дополнительно содержит первый адаптер интерфейса ДЗУ, второе устройство отображения графической информации, первый адаптер устройства отображения графической информации, первый адаптер дискретного ввода-вывода, первую ЭВМ, первый адаптер локальной сети, первый оптоизолированный преобразователь последовательного интерфейса (ОППИ), второй ОППИ, третий ОППИ, четвертый ОППИ, адаптер последовательных интерфейсов, адаптер последовательного интерфейса связи с лагом, второй адаптер дискретного ввода-вывода, первый адаптер мультиплексных каналов, пятый ОППИ, вторую ЭВМ, второй адаптер локальной сети, шестой ОППИ, седьмой ОППИ, третью ЭВМ, восьмой ОППИ, десятый ОППИ, адаптер синхронных последовательных интерфейсов, второй адаптер мультиплексных каналов, второе ДЗУ, второй адаптер интерфейса ДЗУ, третий адаптер локальной сети, второй адаптер устройства отображения графической информации, четвертую ЭВМ, четвертый адаптер локальной сети, пятый адаптер локальной сети, шестой адаптер локальной сети, десятый ОППИ, пятую ЭВМ, третье ДЗУ, третий адаптер интерфейса ДЗУ, первый цифроаналоговый преобразователь (ЦАП), микроконтроллер, первый многоканальный преобразователь фаза-код (МПФК), третий адаптер дискретного ввода-вывода, первый блок буферных усилителей сигналов релейного обмена (БУСРО), второй блок БУСРО, третий блок БУСРО, четвертый блок БУСРО, четвертый адаптер дискретного ввода-вывода, седьмой адаптер локальной сети, одиннадцатый ОППИ, шестую ЭВМ, четвертое ДЗУ, четвертый адаптер интерфейса ДЗУ, второй ЦАП, второй МПФК, третий МПФК, четвертый МПФК, пятый адаптер дискретного ввода-вывода, пятый блок БУСРО, шестой адаптер дискретного ввода-вывода, восьмой адаптер локальной сети, седьмую ЭВМ, двенадцатый ОППИ, пятое ДЗУ, пятый адаптер интерфейса ДЗУ, третий ЦАП, пятый МПФК, шестой МПФК, седьмой МПФК, седьмой адаптер дискретного ввода-вывода, шестой блок БУСРО, восьмой адаптер дискретного ввода-вывода, вторую клавиатуру, координатно-указательное устройство, блок устройств ввода команд, блок устройств индикации, устройство объединения сигналов клавиатур, коммутатор сигналов клавиатуры, коммутатор сигналов координатно-указательного устройства, первую магистраль информационного обмена локальной сети, вторую магистраль информационного обмена локальной сети, первую системную интерфейсную магистраль (СИМ), вторую СИМ, третью СИМ, четвертую СИМ, пятую СИМ, шестою СИМ, седьмую СИМ, при этом интерфейсные входы-выходы первого адаптера интерфейса ДЗУ, первого адаптера устройства отображения графической информации, первого адаптера дискретного ввода-вывода, первой ЭВМ, первого адаптера локальной сети соединены между собой посредством первой СИМ, интерфейсные входы-выходы адаптера последовательных интерфейсов, второго адаптера дискретного ввода-вывода, первого адаптера мультиплексных каналов, второй ЭВМ, второго адаптера локальной сети соединены между собой посредством второй СИМ, интерфейсные входы-выходы третьей ЭВМ, адаптера синхронных последовательных интерфейсов, второго адаптера мультиплексных каналов, второго адаптера интерфейса ДЗУ, третьего адаптера локальной сети соединены между собой посредством третьей СИМ, интерфейсные входы-выходы второго адаптера устройства отображения графической информации, четвертой ЭВМ, четвертого адаптера локальной сети, пятого адаптера локальной сети соединены между собой посредством четвертой СИМ, интерфейсные входы-выходы шестого адаптера локальной сети, пятой ЭВМ, третьего адаптера интерфейса ДЗУ, первого ЦАП, третьего адаптера дискретного ввода-вывода, четвертого адаптера дискретного ввода-вывода соединены между собой посредством пятой СИМ, интерфейсные входы-выходы седьмого адаптера локальной сети, шестой ЭВМ, четвертого адаптера интерфейса ДЗУ, второго ЦАП, пятого адаптера дискретного ввода-вывода, шестого адаптера дискретного ввода-вывода соединены между собой посредством шестой СИМ, интерфейсные входы-выходы восьмого адаптера локальной сети, седьмой ЭВМ, пятого адаптера интерфейса ДЗУ, третьего ЦАП, седьмого адаптера дискретного ввода-вывода, восьмого адаптера дискретного ввода-вывода соединены между собой посредством седьмой СИМ, сетевые входы-выходы первого, второго, третьего, пятого адаптеров локальной сети соединены между собой посредством первой магистрали информационного обмена локальной сети, сетевые входы-выходы четвертого, шестого, седьмого, восьмого адаптеров локальной сети соединены между собой посредством второй магистрали информационного обмена локальной сети, к выходу первого адаптера устройства отображения графической информации подключено первое устройство отображения графической информации, первое ДЗУ подключено к входу-выходу интерфейса ДЗУ первого адаптера интерфейса ДЗУ, первая группа выходов первого адаптера дискретного ввода-вывода соединена с управляющими входами коммутатора сигналов клавиатуры, вторая группа выходов первого адаптера дискретного ввода-вывода соединена с управляющими входами коммутатора сигналов координатно-указательного устройства, к третьей группе выходов первого адаптера дискретного ввода-вывода подключен блок устройств индикации, первая группа входов первого адаптера дискретного ввода-вывода образует первый вход сигналов состояния объектов индивидуального наведения, вторая группа входов первого адаптера дискретного ввода-вывода образует второй вход сигналов состояния объектов индивидуального наведения, к третьей группе входов первого адаптера дискретного ввода-вывода подключен блок устройств ввода команд, первый вход первой ЭВМ является входом сигналов клавиатуры и соединен с первым выходом коммутатора сигналов клавиатуры, второй вход первой ЭВМ является входом последовательного интерфейса и соединен с первым выходом коммутатора сигналов координатно-указательного устройства, к первому, второму, третьему, четвертому входам-выходам последовательных интерфейсов адаптера последовательных интерфейсов подключены соответственно первый, второй, третий, четвертый ОППИ, оптоизолированные входы-выходы последовательных интерфейсов которых образуют соответственно первый вход данных боевой информационно-управляющей системы, второй вход данных боевой информационно-управляющей системы, первый вход данных радиолокационного комплекса, второй вход данных радиолокационного комплекса, к входам-выходам второго адаптера дискретного ввода-вывода подключен адаптер последовательного интерфейса связи с лагом, вход которого является входом данных лага, первый и второй входы-выходы первого адаптера мультиплексных каналов образует соответственно третий и четвертый входы данных радиолокационного комплекса, к входу-выходу последовательно интерфейса второй ЭВМ подключен пятый ОППИ, к первому и второму входам-выходам последовательных интерфейсов третьей ЭВМ подключены соответственно шестой и седьмой ОППИ, к первому и второму входам-выходам синхронных последовательных интерфейсов адаптера синхронных последовательных интерфейсов подключены соответственно восьмой и девятый ОПИИ, оптоизолированные входы-выходы которых образует соответственно вход данных первой гидроакустической станции и вход данных второй гидроакустической станции, первый и второй входы-выходы второго адаптера мультиплексных каналов образует соответственно первый и второй входы данных навигационного комплекса, второе ДЗУ подключено к входу-выходу интерфейса ДЗУ второго адаптера интерфейса ДЗУ, к выходу второго адаптера устройства отображения графической информации подключено второе устройство отображения графической информации, первый вход четвертой ЭВМ является входом сигналов клавиатуры и соединен со вторым выходом коммутатора сигналов клавиатуры, второй вход четвертой ЭВМ является входом последовательного интерфейса и соединен со вторым выходом коммутатора сигналов координатно-указательного устройства, к первому входу-выходу последовательного интерфейса пятой ЭВМ подключен десятый ОППИ последовательного интерфейса, ко второму входу-выходу последовательного интерфейса пятой ЭВМ подключен микроконтроллер, выход которого является выходом сигналов управления шаговым двигателем, третье ДЗУ подключено к входу-выходу интерфейса ДЗУ третьего адаптера интерфейса ДЗУ, выход первого ЦАП является выходом сигналов управления устройствами ввода данных объектов группового наведения, к входам-выходам третьего адаптера дискретного ввода-вывода подключен первый МПФК, вход которого является входом сигналов датчиков углов поворота валов ввода данных объектов группового наведения, к первой, второй, третьей, четвертой группам выходов четвертого адаптера дискретного ввода-вывода подключены соответственно первый, второй, третий, четвертый блоки БУСРО, выходы которых являются соответственно первым, вторым, третьим, четвертым выходами команд объектам группового наведения, к входу-выходу последовательного интерфейса шестой ЭВМ подключен одиннадцатый ОППИ, четвертое ДЗУ подключено к входу-выходу интерфейса ДЗУ четвертого адаптера интерфейса ДЗУ, выход второго ЦАП является выходом сигналов управления устройствами ввода данных объектов индивидуального наведения левого борта, к первой, второй, третьей группам входов пятого адаптера дискретного ввода-вывода подключен соответственно второй, третий, четвертый МПФК, входы которых является соответственно первым, вторым, третьим входами сигналов датчиков углов поворота валов ввода данных объектов индивидуального наведения левого борта, к выходам шестого адаптера дискретного ввода-вывода подключен пятый блок БУСРО, выход которого является выходом команд объектам индивидуального наведения левого борта, к входу-выходу последовательного интерфейса седьмой ЭВМ подключен двенадцатый ОППИ, пятое ДЗУ подключено к входу-выходу интерфейса ДЗУ пятого адаптера интерфейса ДЗУ, выход третьего ЦАП является выходом сигналов управления устройствами ввода данных объектов индивидуального наведения правого борта, к первой, второй, третьей группам входов седьмого адаптера дискретного ввода-вывода подключены соответственно пятый, шестой, седьмой МПФК, входы которых являются соответственно первым, вторым, третьим входами сигналов датчиков углов поворота валов ввода данных объектов индивидуального наведения правого борта, к выходам восьмого адаптера дискретного ввода-вывода подключен шестой блок БУСРО, выход которого является выходом команд объектам индивидуального наведения правого борта, оптоизолированный вход-выход пятого ОППИ соединен с оптоизолированным входом-выходом десятого ОППИ, оптоизолированный вход-выход шестого ОППИ соединен с оптоизолированным входом-выходом одиннадцатого ОППИ, оптоизолированный вход-выход седьмого ОППИ соединен с оптоизолированным входом-выходом двенадцатого ОППИ, к первому и второму входам устройства объединения сигналов клавиатур подключены соответственно первая и вторая клавиатуры, выход устройства объединения сигналов клавиатур соединен со входом коммутатора сигналов клавиатуры, выход координатно-указательного устройства соединен со входом коммутатора сигналов координатно-указательного устройства.
| ПРИСПОСОБЛЕНИЕ ДЛЯ ВОСПЛАМЕНЕНИЯ В ДВИГАТЕЛЯХ ВНУТРЕННЕГО ГОРЕНИЯ | 1925 |
|
SU4395A1 |
| US 5247673 A, 21.09.1993 | |||
| Колосниковая решетка | 1927 |
|
SU6923A1 |
| US 4999766 A, 12.03.1991 | |||
| RU 2053547 C1, 27.01.1996. | |||

