Изобретение относится к области медицины, в частности, к стереотаксической нейрохирургии.
Компьютерно-томографические (КТ) - направленные стереотаксические - операции на головном мозге являются современными высокотехнологическими нейрохирургическими операциями, развитие которых произошло лишь в последнее десятилетие (1,2,3). Для их проведения требуется стереотаксическая система, совместимая с компьютерным томографом.
Освоение и обучение персонала работе на таких системах, имеющих различные конструктивные особенности, является сложной и актуальной задачей. Реализация этой задачи предполагает выполнение определенной последовательности действий, которая существует в реальных условиях операции при сохранении принципа высокой точности расчета, попадания в точку цели и выполнения требуемых манипуляций. Однако используемые фантомы (1,3,4,5,6,7) решают лишь отдельные задачи и не предназначаются для моделирования основных этапов операции, что создает трудности при обучении персонала на таких системах.
Так, фантом в стереотаксической системе ("BRW", "Radionics", USA) (4) имел сложную конструкцию и представлял собой кольцо, которое крепилось к металлическому основанию. На металлическом основании имелся указатель, положение которого показывало координаты в полярной системе, а движение его по своей оси определяло высоту положения его кончика (Tip pointer), который является воображаемой точкой цели. Тем не менее координаты кончика указателя устанавливались на фантоме непосредственно после сканирования головы больного, выбора цели в головном мозге и расчета ее координат. Затем координаты точки цели вторым нейрохирургом переносились на стереотаксическую дугу аппарата и перед введением рабочего инструмента в мозг проводилась проверка точности переноса рассчитанных координат точки цели на стереотаксическую дугу, т.е. осуществлялся контроль возможной ошибки нейрохирурга при выполнении этого этапа операции. Следовательно, указанные особенности фантома обеспечивали лишь повышение безопасности на конечном этапе операции, но не позволяли использовать его для моделирования стереотаксической операции и, тем более, обучения.
Несмотря на расширение оперативных возможностей, которые предоставляют стереотаксические системы, совместимые с томографами в сравнении с традиционными рентгеновскими стереотаксическими аппаратами, у новых систем есть и недостатки. Одним из главных среди них является погрешность стереотаксических расчетов точки цели, выбираемой на одном из томографических срезов. Для оценки точности (соответствия) компьютерно-томографических стереотаксических расчетов истинным координатам точки цели разработаны и используются другие фантомы. Так, фантом (6), который использовался для тестирования различных стереотаксических систем и томографов, состоял из акрилового основания, которое жестко крепилось к основному кольцу. К основанию перпендикулярно жестко присоединялись 12 цилиндрических стержней из пластика различной длины, графитовые кончики которых имели вид конусов размерами 2х2 мм. Графитовые кончики являлись точками цели при исследовании. Во время сканирования фантома находили координаты 12 точек и сравнивали с данными, снимавшимися со стереотаксического аппарата, в который крепился фантом. Т.о. данный тип фантомов обеспечивал проверку точности томографических расчетов, но не давал возможности смоделировать саму операцию.
Другой фантом (4), который также используется для тестирования стереотаксической аппаратуры, представляет собой восьмигранный диск из прозрачного материала диаметром 171 мм и высотой 31 мм. В диске высверлены 8 перпендикулярно верхней и нижней поверхности диска расположенных отверстий диаметром 2 мм. Фантом крепится параллельно головному кольцу с помощью головодержателей. Отверстия в диске заполняются иогексолом для КТ-сканирования. Плоскость сканирования параллельна поверхности диска толщиной среза 2 мм. Самая верхняя точка выбираемого контрастированного столбика была расчетной точкой. Эти томографические координаты сопоставляются с координатами, получаемыми при их определении у фантома при использовании стереотаксической дуги (8) ("Arc-CRW", "Radionics", USA). Несмотря на удобство и простоту применения этого фантома в сравнении с (6,7) его также нельзя употреблять при моделировании основных этапов операции и обучения. Это обусловлено тем, что нарушается последовательность действий хирурга, которая наблюдается в реальной операции. Например, координаты точки цели определяются стереотаксической дугой, что никогда не выполняется в действительности, а дуга используется для крепления рабочего инструмента для манипуляций на мозге. Тестирование точности расчетов не предполагает проведения всех этапов реальной операции, а поэтому этот вид фантома не может использоваться при проведении модельных операций и обучения на них персонала.
Задачей изобретения является моделирование КТ-направленных стереотаксических операций. Технический эффект изобретения - способа и устройства для его осуществления - заключается в соблюдении последовательности действий и основных этапов реальной операции при сохранении принципа высокой точности манипуляций.
Этот эффект достигается тем, что в способе моделирования компьютерно-томографических направленных стереотаксических операций, заключающийся в том, что на первом этапе в корпус фантомного устройства помещают вставку, фиксируют его головодержателями, соединенными с головным кольцом, которое крепят на основание фантома, перемещают указатель фантома и вводят его в основное отверстие вставки с возможностью расположения кончика указателя в точке пересечения оси основного отверстия с верхней поверхностью вставки, а координаты воображаемой точки цели снимают со шкал фантома, на втором этапе снимают фантом, в основное отверстие вставки помещают Т-образную втулку, к головному кольцу крепят локализатор и проводят сканирование, находят точки цели на томографическом срезе на мониторе в виде изображения отверстия в Т-образной втулке, а координаты точки цели рассчитывают по программе, на третьем этапе переносят томографические координаты точки цели на стереотаксическую дугу, снимают локализатор и крепят дугу к головному кольцу, на завершающем этапе вынимают втулку из основного отверстия вставки, помещают в него имитатор точки цели, выбирают рабочий инструмент, устанавливают глубину его погружения, закрепляют его на стереотаксической дуге и при совпадении координат захватывают имитатор точки цели рабочим инструментом.
Фантомное устройство для моделирования компьютерно-томографических направленных стереотаксических операций содержит корпус в виде полого цилиндра с пазами и прикрепленную к нему прозрачную вставку с отверстиями для размещения в них с возможностью удаления во время моделирования прозрачных Т-образных втулок с отверстиями.
Наличие отверстий во вставке и Т-образных втулок позволяет впервые использовать конкретные элементы стереотаксической системы по прямому назначению (т. е. например, стереотаксическая дуга только фиксирует рабочий инструмент) и в той последовательности, которые существуют в реальной операции (замена втулки на имитатор цели позволяет рабочим инструментом захватить его и удалить из отверстия - действия хирурга при стереотаксической биопсии опухоли мозга).
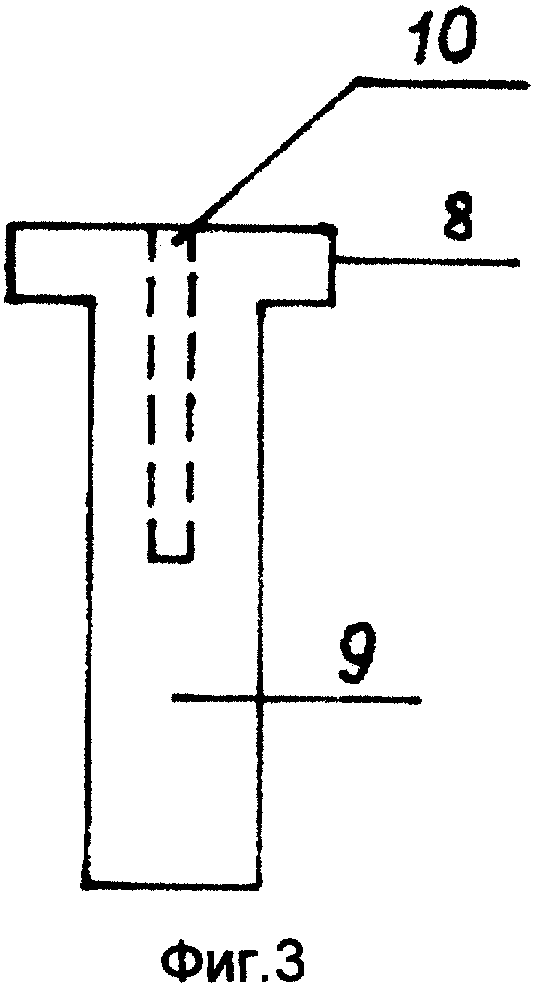
Наличие высверленного отверстия в Т-образной втулке обеспечивает более точное нахождение точки цели на фантоме, что повышает точность самих манипуляций.
На фиг. 1 показан общий вид фантомного устройства для осуществления способа обучения проведения модельных операций; на фиг. 2 - схема фантомного устройства; на фиг. 3 - схема устройства втулки; на фиг. 4 - фантом, закрепленный головодержателями; на фиг. 5 - установленный локализатор на основное кольцо; на фиг. 6 - изображение фантома, в котором появляются шляпки втулок с высверленными в них отверстиями; на фиг. 7 - представление фантома на этапе расчета координат точки цели; на фиг. 8 - изображение стереотаксической системы с рабочим инструментом (биопсийные кусачки), фантома с имитатором точки цели; на фиг. 9 - изображение захвата кусачками имитатора точки цели.
Устройство представляет собой объект, состоящий из корпуса 1, вставки в виде прозрачного диска 2, втулки 3 и двух винтов 4. Все элементы выполнены из прозрачного пластика, а винты 4 - из фторопласта. Корпус 1 выполнен в виде полого цилиндра 5, внутри которого помещаются вставка 2 с двумя Т-образными втулками 3. Вставка 2 располагается на уровне пазов 6 корпуса 1 и крепится к нему двумя винтами 4. Во вставке 2 высверлены два отвертия 7 и 8 диаметром по 5 мм. Основное отверстие 7 располагается в одном из квадрантов, а вспомогательное 8 - по центру вставки 2. В отверстия 7 и 8 для проведения сканирования помещаются две одинаковые Т-образные втулки 3, по центру которых высверлено отверстие 9 диаметром 1 мм, длиной 9 мм. Т-образные втулки состоят из тела 10 со шляпкой 11.
Основные детали используемой для моделирования операций, проводимых на стереотаксической системе "CRW-FN" "Radionics", США (1,5), - это головное кольцо 12, головодержатели 13, локализатор 14, стереотаксическая дуга 15, рабочий инструмент (биопсийные кусачки) 16, имитатор точки цели 17.
Предлагаемый способ проведения модельных компьютерно-томографических направленных стереотаксических операций реализуется с помощью заявляемого фантомного устройства.
Моделирование операций проводится следующим образом. На первом этапе осуществляется крепление фантомного устройства к кольцу 12 головодержателями 13 ("Radionics"), которые фиксируют корпус 1 с внешней стороны. В корпус 1 помещают вставку 2, которую крепят винтами 4. Головное кольцо 12 помещают на основание фантома от стереотаксической системы "BRW" ("Radionics"), кpепят его, перемещая указатель, находят снизу основное отверстие 7 вставки 2, вводят его в отверстие таким образом, чтобы кончик указателя располагался в точке пересечения оси отверстия 7 с верхней поверхностью вставки 2. Координаты точки цели снимают со специальных шкал, которые расположены в основании фантома "BRW". Затем в основное отверстие 7 вставки 3 помещают Т-образную втулку 3. Далее к головному кольцу крепят локализатор 14 ("Radionics") и такую систему сканируют на томографе. Сканирование проводится толщиной среза 2 мм. На томографическом срезе появление шляпки 11 втулки 3 с точкой иной плотности (видимое изображение высверленного отверстия во втулке 3) означает нахождение точки цели. Координаты ее рассчитываются по программам фирмы "Radionics". После завершения сканирования локализатор 14 снимают, а на головное кольцо 12 крепят стереотаксическую дугу 15, на которую переносят томографические координаты точки цели и закрепляют рабочий инструмент 16, например, кусачки для биопсии. Тем временем на вставке 2 удаляют Т-образную втулку 3, вставляют в основное отверстие 7 имитатор точки цели 17. После установки глубины рабочего инструмента 16 происходит соприкосновение кусачек с имитатором точки цели 17, затем хирург захватывает имитатор точки цели 17 и удаляет его из отверстия 7. На этом заканчивается весь цикл модельной компьютерно-томографической стереотаксической операции.
Источники информации
1. Handbook of stereotaxy using the CRW apparatus Ed. M.F.Pell, D.G.Thomas, USA, 1994.
2. Kratmenos G.P., Nouby R.M., Bradford R., et all. Images directed stereotactic suegery for brain stem lesions Acta Neuroch (Wien) 1992, 116, pp. 164-170.
3. Stereotactic and Directed Surgery of Brain Tumors Ed.D.G. Thomas, London, 1993.
4. Cohen D.S., Lustgaten J.H., Miller E., et all. Effects of coregistration of MR to CT images on MR stereоtactic accuracy J. Neurosurg. 1995, vol. 82, N 5, pp. 772-779.
5. CRW-FN Stereotactic system. Operator s manual, Radionics Inc., USA, 1997.
6. Maciunas R.J., Galloway R.L., Latimer J.W. The application accuracy of the stereotactic frames Neurosurgery, 1994, vol. 35, N.4, pp. 682-696.
7. Walton L., Hampshire A., Forster D.M. Stereotactic Localization with magnetic resonance imaging: a phantom study to compare the accuracy obtained using two-dimentional and three-dimentional data acquisitions Neurosurgery, 1997, vol. 41, N.1, pp. 131-139.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ ГОЛОВНОГО МОЗГА | 2004 |
|
RU2257178C1 |
| Интерактивный медицинский фантом для отработки навыков проведения функциональных стереотаксических вмешательств | 2022 |
|
RU2790761C1 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВУЮ ТОЧКУ | 1997 |
|
RU2130759C1 |
| СПОСОБ МАРКИРОВКИ ГОЛОВЫ ПАЦИЕНТА ПРИ РАБОТЕ С ИНТРАОПЕРАЦИОННОЙ БЕЗРАМНОЙ НЕЙРОНАВИГАЦИЕЙ | 2015 |
|
RU2607404C2 |
| ФАНТОМ СТЕРЕОТАКСИЧЕСКОГО АППАРАТА | 1994 |
|
RU2108068C1 |
| СТЕРЕОТАКСИЧЕСКАЯ СИСТЕМА | 1994 |
|
RU2125835C1 |
| СПОСОБ НАВЕДЕНИЯ СТЕРЕОТАКСИЧЕСКОГО ИНСТРУМЕНТА НА ЦЕЛЕВЫЕ ТОЧКИ ГОЛОВНОГО МОЗГА | 2016 |
|
RU2638284C2 |
| ФАНТОМ СТЕРЕОТАКСИЧЕСКОГО АППАРАТА | 1991 |
|
RU2023434C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ВИСОЧНОЙ ЭПИЛЕПСИИ | 2017 |
|
RU2646748C1 |
| ОРИЕНТИРУЮЩЕЕ УСТРОЙСТВО СТЕРЕОТАКСИЧЕСКОГО АППАРАТА | 1991 |
|
RU2028117C1 |

Изобретение относится к медицине, в частности к стереотаксической нейрохирургии, и служит для моделирования КТ-направленных стереотаксических операций. В способе соблюдается определенная последовательность основных этапов реальной операции, выполняемых нейрохирургом с использованием конструктивных элементов стереотаксической системы CRW-FN (Radionics Inc., USA) при сохранении принципа высокой точности манипуляций. Способ моделирования КТ-направленных стереотаксических операций достигается особенностями специального фантомного устройства, содержащего вставку с основным отверстием и втулку. Взаиморасположение вставки и втулки определяет возможность выполнения конкретных этапов операции. Втулка выполнена Т-образной с высверленным по ее центру отверстием. Такое выполнение облегчает обнаружение точки цели. В устройстве содержится специальная крышка с высверленным отверстием в ней. Такое выполнение обеспечивает моделирование КТ-направленных стереотаксических операций при использовании неадаптированных к томографам стереотаксических аппаратов. Способ и фантомное устройство позволяют адекватно тестировать стереотаксические системы, проводить обучение персонала работе на них. 2 с.п.ф-лы, 9 ил.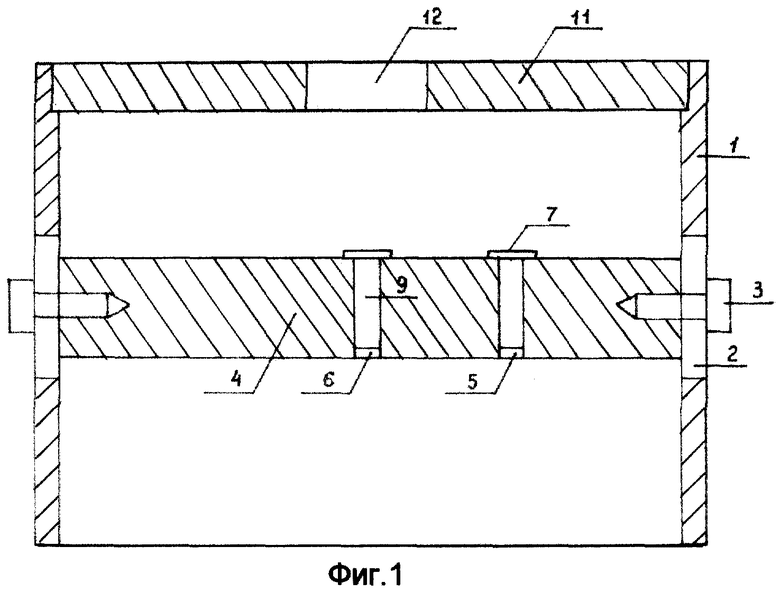
| Cohen D.S | |||
| et all | |||
| Effects of coregistration of MR to CT images on MR steretactic accuracy | |||
| J | |||
| Neurosurg | |||
| Топка с качающимися колосниковыми элементами | 1921 |
|
SU1995A1 |
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Телефонная трансляция с катодным реле | 1921 |
|
SU772A1 |
| СПОСОБ СТЕРЕОТАКСИЧЕСКОГО НАВЕДЕНИЯ | 1995 |
|
RU2121296C1 |

