Настоящее изобретение относится к способу точного регулирования содержания расплавленного оксида алюминия в электролизерах для получения алюминия по способу Hall-Heroult с целью на только поддерживания фарадеевского выхода по току на высоком уровне, но и также уменьшения эмиссий особенно вредных и загрязняющих окружающую среду газообразных фторуглеродов вследствие аномалий в функционировании электролизеров, известных под названием анодного эффекта.
В течение последних лет постепенно автоматизируют функционирование электролизеров для получения алюминия, в первую очередь для улучшения стабильности работы, в сущности для улучшения энергетического баланса и фарадеевского выхода по току, а также в эргономической и экологической целях для ограничения участия людей в трудоемкой работе и повышения эффективности улавливания содержащих фтор эффлюентов.
Одним из существенных факторов, позволяющих обеспечивать стабильность работы алектролизера для получения алюминия путем электролиза оксида алюминия, растворенного в расплавленной электролитической ванне на основе криолита, является поддерживание соответствующего содержания оксида алюминия, растворенного в этом электролите, и, следовательно, адаптация в любой момент вводимых в ванну количеств оксида алюминия к расходу оксида алюминия в электролизере.
Так, избыток оксида алюминия создает опасность засорения дна ванны отложениями нерастворенного оксида алюминия, которые могут превращаться в твердые плотные слои, электроизолирующие часть катода. Это тогда благоприятствует возникновению в металле ванн очень сильны горизонтальных электрических токов, которые за счет взаимодействия с магнитными полями перемешивают слой металла и вызывают нестабильность поверхности раздела ванна-металл. Наоборот, недостаток оксида алюминия провоцирует возникновение анодного эффекта, выражающегося в снижении производительности и резком повышении напряжения на клеммах электролизера, которое может возрастать от 4 до 30 или 40 вольт, следствием этого избыточного расхода энергии, кроме того, является падение энергетического коэффициента полезного действия (КПД) электролизера, а также фарадеевского выхода по току вследствие повторного растворения алюминия в ванне и повышения температуры электролитической ванны.
Необходимость поддерживания содержания оксида алюминия, растворенного в электролите, в точных и относительно узких пределах, следовательно, введения оксида алюминия с наиболее возможной равномерностью, требует от специалиста разработки автоматических способов загрузки и регулирования количества оксида алюминия в электролизерах. Эта необходимость вынуждает использовать так называемые "кислые" электролитические ванны (с повышенным содержанием AlF3), что позволяет снижать температуру функционирования электролизера на 10-15oC (примерно 950oC вместо обычных 965oC) и таким образам достигать фарадеевских выходов по току по крайней мере 94%. В самом деле, тогда необходимо иметь возможность регулировать количество оксида алюминия в очень точном и очень узком диапазоне концентраций (1 - 3,5%), учитывая уменьшение степени растворимости оксида алюминия, связанное с новым составом, также, как с понижением температуры ванны.
Прямое определение содержания оксида алюминия в ваннах путем анализа периодически отбираемых образцов оказывается недостаточным при промышленном производстве; в большинстве известных промышленных способов прибегают к непрямой оценке содержаний оксида алюминия по электрическому параметру, характеризующему концентрацию оксида алюминия в вышеуказанном электролите. Этим параметром обычно является изменение сопротивления R на клеммах электролизера, загружаемого под напряжением U, включающем контр-электродвижущую силу "e", оцениваемую, например, как 1,65 В, и через который проходит ток I, таким образом, что R = (U-е)/I.
Путем эталонирования можно построить калибровочную кривую изменения R в зависимости от содержания оксида алюминия и за счет измерения R (с определенной частотой согласно хорошо известным методам) в любой момент можно знать концентрацию оксида алюминия [Al2O3]. Этот принцип определения предпочитают согласно патенту Франции 1457746 (патент Великобритании 1091373) для контролирования распределения оксида алюминия при использовании средства для пробивания отверстий в застывшей на поверхности ванны корке электролита.
Точно также, согласно патенту США 3400062, изменение сопротивления ванны определяют с помощью контрольного (pilote) анода для обнаружения недостатка оксида алюминия и тенденции к анодному эффекту и, таким образом, для воздействия на скорость введения оксида алюминия из воронки для сыпучих тел (бункера), снабженной устройством для пробивания отверстия в застывшей корке электролита.
Недавно, способы точного регулирования, основанные на контролировании содержания оксида алюминия между верхним пределам и нижним пределом, стали объектом новых патентов, как патент США 4126525 и европейский патент 044974 (патент США 4654129), причем последний патент уже выдан на имя заявителя.
В первом из этих патентов, соблюдаемый диапазон содержаний оксида алюминия составляет 2-8%. В течение предварительно определенного времени t1 электролизер загружают количеством оксида алюминия, которое больше его теоретически рассчитанного расхода, вплоть до достижения установленной концентрации оксида алюминия (например, 7%, следовательно, немного ниже допустимого максимума, разного 8%), затем переключают загрузку на скорость, равную теоретически рассчитанному расходу, в течение предварительно установленного времени t 2, наконец, загрузку прекращают до появления первых признаков анодного эффекта. Тогда повторяют цикл загрузки со скоростью выше теоретически рассчитанного расхода.
Согласно этому способу, и, в частности, согласно результатам, которые приводятся в примерах, относящихся к его осуществлению, концентрация оксида алюминия в ванне может изменяться в течение одного цикла от 3 до 8%, что остается недостаточным для регулирования содержания оксида алюминия в кислой ванне в таком низком и узком диапазоне, как 1-3 или 4%. Это реализуют в способе согласно европейскому патенту 044794 (патент США 4431491) на имя заявителя, в котором, наряду с измерением сопротивления R на клеммах электролизера прибегают к второму параметру регулирования, которым является градиент P = dR/dt, характеризующий изменение сопротивления R, вызываемое изменением по желанию режима загрузки оксида алюминия в ванну в течение определенного времени. В самом деле, одного знания сопротивления R, на клеммах электролизера недостаточно для управления с высокой точностью содержанием оксида алюминия в электролизере и, следовательно, для контролирования количества или частоты анодных эффектов, так как параметр R при постоянной температуре ванны зависит от двух переменных, с одной стороны, от содержания оксида алюминия, отображающего удельное сопротивление p ванны, и, с другой стороны, от расстояния анод-металл (РАМ). Следовательно, нужно найти другой различающий параметру который получают за счет градиента P = dR/dt и который называют градиентом сопротивления, единственный параметр, действительно характеризующий обеднение или обогащение ванны оксидом алюминия. Создавая, например, мгновенную недостаточную загрузку ванным оксидом алюминия по отношению к теоретически рассчитанному расходу, отмечают повышение удельного сопротивления ρ при понижении содержания оксида алюминия в ванне согласно известному закону эволюции, тогда как в то же самое время РАМ с намного более медленной эволюцией практически не изменяется.
Также на регулировании этих двух параметров R и dR/dt основан способ согласно европейскому патенту 044794, который вкратце можно изложить следующим образом: от фазы недостаточной загрузки ванны оксидом алюминия переходят в фазу избыточной загрузки в течение предварительно определенной продолжительности T, если сопротивление R превышает верхний предел R0 + r, где R0 означает сопротивление заданной величины и если градиент сопротивления P выше градиента заданной величины P0.
Взамен, если градиент P остается ниже градиента P0 заданной величины характеризующего достаточное содержание оксида алюминия в ванне, сохраняют режим недостаточной загрузки, однако, если необходимо, анодную рамку опускают вниз или осуществляют "сужение" для уменьшения РАМ и таким образом восстановления R в диапазоне заданной величины R0- + r.
Наконец, от фазы избыточной загрузки продолжительностью T переходят к скорости недостаточной загрузки по истечении этой продолжительности T и, если R становится ниже нижнего предела R0-r диапазона заданной величины, анодную рамку поднимают или осуществляют "разжатие" для увеличения РАМ и восстановления R в диапазоне заданной величины R0- + r. Тогда начинают новый цикл.
Этот способ регулирования следовательно, позволяет поддерживать содержание оксида алюминия в ванне в узком и незначительном по величине диапазоне и таким образом достигать фарадеевских выходов по току порядка 95% при использовании кислых ванн, одновременно и в заметной степени уменьшая количество (или частоту) анодных эффектов в электролизере, которое подсчитывают в виде числа анодных эффектов на электролизер и в день (АЭ/электролизер/день) под названием "степень анодного эффекта".
В прежних поколениях электролизеров с боковой насечкой степень анодного эффекта выше 2, даже 3, АЭ/электролизер/день, тогда как в более нового типа электролизерах с точечной перфорацией эта степень составляет 0,2-0,5 АЭ/электролизер/день. В этой стадии сверхрасход энергии и потери фарадеевского выхода по току, связанные с анодными эффектами, являются незначительными и вплоть до последнего времени этот уровень производительности можно рассматривать как удовлетворительный.
Однако недавно в связи с разработкой электролизеров очень высокой интенсивности и поиском все более высоких производительностей, особенно в отношении фарадеевского выхода по току и энергетического кпд, а также с учетом проблем загрязнения фторуглеродными соединениями (CFx), в особенности тетрафторидом углерода CF4, значительный потенциал которых в отношении поглощения инфракрасных излучений благоприятствует тепличному эффекту, уменьшение, даже ликвидаций, анодных эффектов, генерирующих газообразные фторуглероды, становится первоочередной задачей. В этом отношении следует напомнить, что анодный эффект представляет собой явление электролиза фторид-ионов, которое внезапно возникает тогда, когда имеет место недостаток ионов кислорода, контактирующих с анодами, вследствие дефицита оксида алюминия. Вместо образования, согласно нормальному протекании процесса, диоксида углерода и монооксида углерода в электролизере получаются газообразные фторуглероды, улавливание которых обычными способами невозможно в связи с их химической инертностью и их высокой стабильностью.
Разработка способа точного регулирования незначительных содержаний оксида алюминия в электролитической ванне, обеспечивающего высокий фарадеевский выход по току (≥ 95%) со степенью анодного эффекта ниже 0,05 АЭ/электролизер/день, составляет главную задачу для:
- конструкции новых заводов для электролиза, при использовании во все большем количестве электролизеров очень высокой интенсивности;
- развития существующих заводов без увеличения, даже при снижении выбросов газообразных фторуглеродов.
Способ согласно изобретению позволяет решить эту проблему загрязнения за счет уменьшения степени анодного эффекта в среднем до 0,02 АЗ/электролизер/день, то есть ниже указанной степени 0,05 АЭ/электролизер/день и тем более степени 0,2-0,5 АЭ/электролизер/день уровня техники, при этом улучшают даже фарадеевский выход по току до величины выше 95%. Способ согласно изобретению включает использование основного принципа регулирования содержания оксида алюминия, уже описанного в европейском патенте 044794 (патент США 4431491), согласно которому используют два параметра регулирования - сопротивление R и градиент сопротивления P = dR/dt, которые сравнивают с заданными величинами для осуществления изменения режима загрузки оксида алюминия или сдвига анодной рамки, чтобы скорректировать расстояние анод - металл (РАМ).
Способ согласно изобретению, однако, отчетливо отличается от вышеописанного способа тем, что осуществляют совершенно разную последовательность операций в каждом цикле регулирования, а именно
- определение сопротивления и градиента в конце каждого цикла регулирования, а не только, когда сопротивление выходит за диапазон заданной величины;
- осуществление фазы избыточной загрузки, если содержание оксида алюминия, определяемое по градиенту сопротивления, становится очень незначительным и это каково бы ни было положение сопротивления по отношению к диапазону заданной величины;
- наконец, совершенствование методов определения сопротивления R, и особенно градиента сопротивления P, также, как использование вспомогательных параметров, которые будут пояснены далее, обеспечивающее одновременно высокую точность и большую достоверность (надежность) нового способа регулирования.
Следовательно, благодаря новой последовательности операций внутрь каждого гикла, учитывая эти различные модификации, способ согласно изобретению позволяет снизить в среднем в 10 раз степень анодного эффекта, достигаемого при использовании способов уровня техники, однако, выбираемых среди наиболее эффективных, и ожидать фарадеевских выходов по току неуклонно выше 95%.
Более конкретно, настоящее изобретение относится к способу регулирования содержания оксида алюминия в ванне электролизера для получения алюминия путем электролиза оксида алюминия, растворенного в расплавленной соли на основе криолита, при котором осуществляют загрузку оксида алюминия со скоростью, изменяемой в зависимости от величины и эволюции сопротивления R электролизера, рассчитываемого из разности электрического потенциала, измеряемой на клеммах электролизера, и чередуют фазы недостаточной загрузки оксида алюминия при введении оксида алюминия с медленной скоростью CL (фаза 1) и фазы избыточной загрузки оксида алюминия при введении оксида алюминия с быстрой скоростью CR или ультрабыстрой скоростью CUR (фаза 2) по отношению к заданной (стандартной) скорости или теоретически рассчитанной скорости введения СТ, соответствующей среднему теоретически рассчитанному расходу оксида алюминия в электролизере, отличающемуся тем, что циклы регулирования продолжительностью T включают, в каждый цикл, последовательность следующих операций: А) в конце каждого цикла регулирования (i) рассчитывают среднее сопротивление R (i), скорость эволюции сопротивления или градиент сопротивления P (i), скорость эволюции градиента сопротивления или кривизну C (i) и прогнозирование величины градиента сопротивления в момент t (i+l) или экстраполированного градиента PX(i) = P (i) + C(i)xT, которая представляет собой оценку будущего градиента сопротивления P (i+l) в конце цикла регулирования (i + 1);
Б) величину R (i) сравнивают с заданной (пороговой) величиной R0 и соответственно проводят операции сдвига анодной рамки, а именно: уменьшение расстояния анод-металл или сужение, увеличение расстояния анод - металл или разжатие;
В) загрузку оксида алюминия регулируют в зависимости от величин градиента P(i), кривизны C (i) и экстраполированного градиента PX(i), предпочтительно по отношению к пороговым стандартным значениям, таким, как P0, C0 и PX0, чтобы компенсировать заранее эволюции содержания оксида алюминия.
Согласно предпочтительному варианту осуществления изобретения, регулирование содержания оксида алюминия в стадии В) проводят в следующих условиях:
если загрузка оксида алюминия происходит в фазе 1, величины P(i), C(i) и PX(i) сравнивают соответственно с пороговыми стандартными значениями P0, C0 и PX0:
- если P(i) < P0 и PX(i) < PX0, то фаза 1 продолжается;
- если P(i) ≥ P0 или PX(i) ≥ PX0, то переходят в фазу 2 загрузки оксида алюминия;
- если C(i) ≥ C0, то фазу 2 начинают с загрузки с ультра-быстрой скоростью в течение предварительно определенной или рассчитанной продолжительности, с последующей загрузкой с быстрой скоростью в течение предварительно определенной или рассчитанной продолжительности, причем расчет продолжительностей осуществляют в зависимости от величин, рассчитанных в конце цикла регулирования, определенного ранее;
- если C(i) < C0, то загрузку оксида алюминия прямо переводят в быструю скорость в течение предварительно определенной или рассчитанной продолжительности в зависимости от величин, рассчитанных в конце ранее определенного цикла регулирования;
если загрузка оксида алюминия происходит в фазе 2, то фаза 2 обычно продолжается в течение предварительно и определенной или рассчитанной продолжительности по окончании предыдущей фазы 1.
Во время разработки нового способа согласно изобретению, заявитель на деле установил, что можно эффективно снижать степень анодного эффекта, переходя в режим загрузки с быстрой скоростью, не дожидаясь, когда сопротивление R выйдет из диапазона заданной величины согласно вышеописанному уровню техники, начиная с момента, когда градиент сопротивления P становится очень высоким, показатель содержания оксида алюминия в ванне очень низким (1-2%) и возникает очень большая опасность появления анодного эффекта.
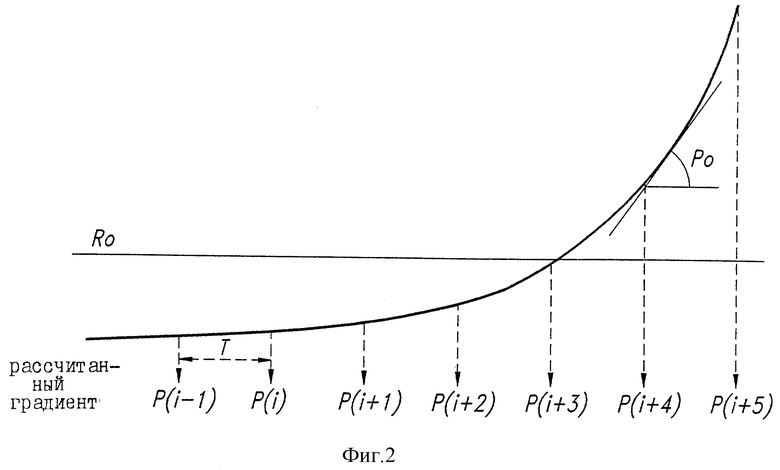
Из фиг. 1 на которой представлено изменение сопротивления R на клеммах электролизера в зависимости от содержания оксида алюминия в ванне для различных расстояний анод - металл, возрастающих в направлении от PAM1 к PAM3, видно, что, регулируя содержание оксида алюминия в ванне в пределах от 1 до 3,5%, находятся в наилучших возможных условиях, с одной стороны, для использования кислых электролитических ванн при пониженной температуре, гарантирующей отличные фарадеевские выхода по току, с другой стороны, для обнаружения меньшего изменения сопротивления, так как находятся в зоне более высокого градиента изменения R, то есть в зоне наибольшей чувствительности. Компенсация этого двойного преимущества требует способности очень быстрой и в количественном отношении значительной реакции на уровне режима загрузки ванны оксидом алюминия для предотвращения очень значительных опасностей возникновения анодного эффекта, который появляется с того момента, как только содержание оксида алюминия в ванне приближается к 1%.
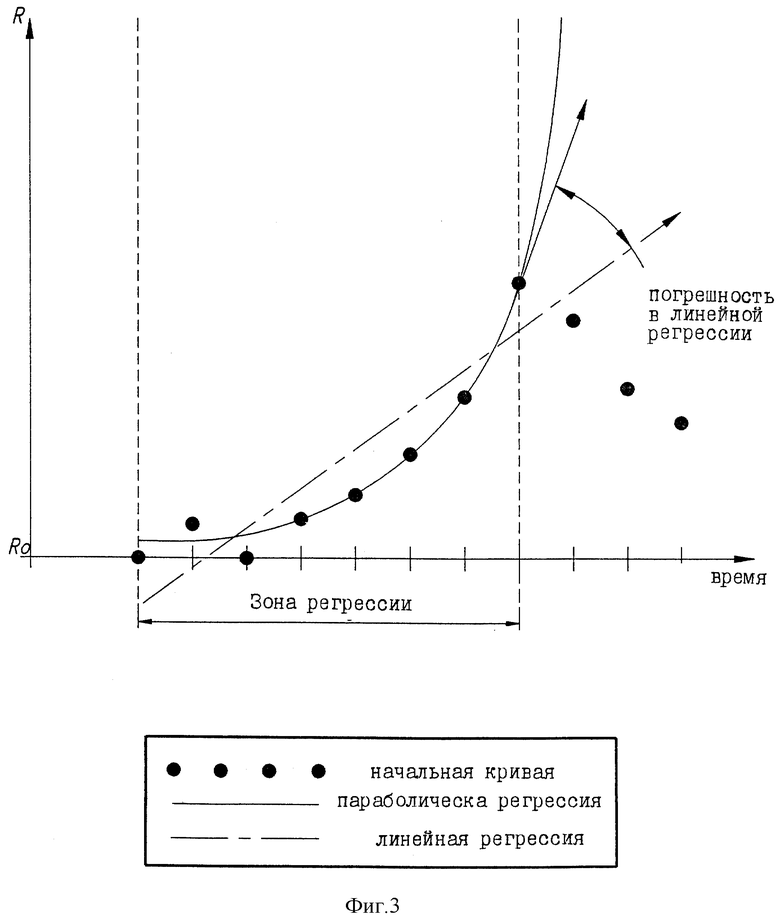
Для решения этой проблемы, неполностью решенной в способе регулирования наиболее близкого уровня техники, в котором предусматривают только расчет величины градиента, когда сопротивление R превышает верхний порог стандарта R0+r, оказывается необходимым осуществление не только этого расчета градиента в конце каждого цикла регулирования, но и также расчеты экстраполированного градиента, предусматриваемого для конца следующего цикла, с целью их сравнения со стандартными пороговыми величинами и если необходимо, начинать немедленно и досрочно убыстрение темпа загрузки в случае быстрого увеличения сопротивления, как это показано на графике фиг. 2.
Эта новая процедура регулирования содержания оксида алюминия не исключают осуществления дополнительных мер безопасности. Так, процедуру регулирования осуществляют только тогда, когда электролизер находится в нормальных условиях функционирования (то есть, корректно регулируемое, стабильное функционирование и без операций, нарушающих эксплуатацию или регулирование, таких, как изменение (положения) анода, выливание металла, или специфические процедуры регулировки), позволяющих переходить в фазу 1. В случае, где электролизер не находится в нормальных условиях функционирования, загрузку оксида алюминия проводят с теоретически рассчитанной скоростью СТ или в фазе ожидания, до тех пор, пока электролизер не будет находиться в нормальных условиях функционирования для перехода в фазу 1. Кроме того, если фазу 1 загрузки, реализуемую в обычных рамках процедуры регулирования, продолжают сверх предварительно определенной продолжительности и если число операций разжатия в течение этой фазы 1 превышает заданный порог безопасности, обнаруживают, что ванна слишком обогащена оксидом алюминия и тогда очень сильно уменьшают или полностью прекращают загрузку оксида алюминия для освобождения ванны от избытка в ней оксида алюминия.
Наоборот, если число операций сужения в течение той же самой фазы 1 превышает заданный порог безопасности, начинают фазу 2 загрузки, каковы бы ни были величины градиента сопротивления и экстраполированного градиента.
Наконец, если кривизна C(i) превышает заданный порог безопасности, начинают фазу 2 загрузки оксида алюминия, каковы бы ни были величины градиента сопротивления R(i) и экстраполированного градиента PX(i).
Кроме того, на уровне определения параметров регулирования, включаемых в новый способ регулирования:
- для повышения точности вносят изменения в методы расчета известных параметров, таких, какими является R и P;
- дополнительные и новые параметры используют также для повышения достоверности.
Так, для расчета сопротивления R(i) в каждом конце цикла регулирования (i) продолжительностью T (продолжительность составляет от 0 секунд до 15 минут), в начале которого осуществляют возможные операции регулирования, которые изменяют уровень сопротивления, разделяют цикл регулирования (i) на "n" элементарных циклов продолжительностью "t" (от 1 секунды до 15 минут), исключают "a" первых элементарных циклов, в течение которых уровень сопротивления изменяют за счет операций регулирования анодной рамки, и рассчитывают среднюю величину R (i) для (n-a) последних элементарных циклов (где а < n).
В этом случае, также в конце каждого элементарного цикла k продолжительностью t рассчитывают среднее сопротивление r(k) этого элементарного цикла. Эти величины r(k) вводят в запоминающее устройство в течение всей фазы 1 загрузки для расчета градиента R (i) сохраняя число N последних значений (причем N означает предварительно определенное число).
На деле, градиент сопротивления R(i), экстраполированный градиент PX(i) и кривизну C(i), определяемые в конце каждого цикла регулирования (i) продолжительностью T, рассчитывают из банка данных средних величин сопротивлений r(k) элементарных циклов, заложенных в запоминающее устройство, начиная с начала фазы 1 недостаточной загрузки, ограничиваясь числом N последних значений, и любым методом расчета, при котором осуществляют нивелирование необработанных данных r(k) при исключении изменений сопротивления, связанных с операциями регулирования анодной рамки. Расчет градиента сопротивления и вспомогательных параметров можно осуществлять путем параболической регрессии в отношении сопротивлений или путем линейной регрессии в отношении изменений сопротивления, или любым другим эквивалентным методом с нелинейной регрессией в отношении сопротивлений.
Предпочтительно, используемый метод расчета градиента R(i) сопротивления состоит в линейной регрессии в отношении измерений сопротивления или мгновенных градиентов dr(k) = r(k)-r(k-1), причем расчет проводят в конце каждого элементарного цикла "k" продолжительностью "t" и после исключения элементарных циклов, в течение которых проводят операции регулирования анодной рамки. Эта линейная регрессия в отношении мгновенных градиентов dr(k) эквивалент параболической регрессии в отношении сопротивлений r(k) после исключения изменений сопротивления вследствие операций регулирования анодной рамки.
В самом деле, следует напомнить, что сопротивление эволюционирует по кривой, а не по прямой. Однако, градиент согласно европейскому патенту 044794 рассчитывают, осуществляя непосредственно линейную регрессию в отношении величин сопротивления, измеряемых в регулярные интервалы. Как следует из графика на фиг. 3, это обязательно приводит к преуменьшению истинного значения градиента. Более того, эта погрешность в оценке за счет дефекта становится тем более значительной, чем более искривленной является кривая эволюции R, то есть сопротивление быстро возрастает. Так, согласно европейскому патенту 044794, когда сопротивление превышает верхний порог стандарта R0 + r диапазона регулирования это изменение может просто приводить к необходимости операции сужения анодной рамки и к продлению загрузки с медленной скоростью, тогда как истинное значение градиента R0 в самом деле выше стандартного значения Ro и тогда очень близок анодный эффект.
Новый метод расчета градиента, используемый при осуществлении настоящего изобретения, базируется на принципе параболической регрессии, который позволяет намного лучше приблизиться к реальной кривой повышения сопротивления, чем классическая линейная регрессия, как это показано на диаграмме, представленной на фиг. 3. Если по соображениям сложности и возможности расчета, выходящего за рамки изобретения, заявитель не использует точно этот тип регрессии для расчета градиента, тем не менее он применяет родственный параболической регрессии метод, состоящий в расчете прямой линейной регрессии в отношении мгновенных градиентов, и величину градиента сопротивления P(i) находят по ординате в момент t(i) прямой линейной регрессии в отношении мгновенных градиентов.
Эта новая процедура расчета градиента, кроме того, дает дополнительные и новые сведения, которые используют в качестве вспомогательных параметров регулирования с целью оптимизации регулирования содержания оксида алюминия.
Известность прямой линейной регрессии в отношении мгновенных градиентов позволяет предвидеть величину градиента сопротивления для цикла (i+1) или экстраполированного градиента PX(i), которую находят по ординате экстраполированной прямой регрессии в момент t(i + 1) = t(i) + T. Эта величина экстраполированного градиента PX(i) используется для обнаружения досрочно быстрого увеличения сопротивления и принятия решения перехода в фазу загрузки с "быстрой'' скоростью CR, когда этот экстраполированный градиент PX(i) становится выше стандартного экстраполированного градиента PX такого рода, что PX(i) ≥ PХ0≥ P0.
Также очень предпочтительным является использование другого вспомогательного параметра, которым является кривизна C(i), то есть скорость эволюции градиента сопротивления P(i), определяемого по наклону прямой линейной регрессии в отношении мгновенных градиентов для того, чтобы начинать и изменять избыточную загрузку, также согласно принципу, заключающемуся в том, что повышенная кривизна свидетельствует о резком повышении сопротивления. Так, превышение порогового значения C0 требует режима загрузки с так называемой ультрабыстрой скоростью "CUR". Для более незначительной кривизны, чем C0, режим загрузки с быстрой скоростью CR, управляемый параметрами P(i), и PX(i), считается достаточным для уменьшения R(i) и избежания анодного эффекта.
Следует заметить, что пороговые стандартные величины P0, PX0 и C0 могут принимать различные предварительно определенные или рассчитанные значения в зависимости от условий функционирования электролизера (например, кислотность ванны, температура, сопротивление).
Для сведения, для электролизера на 40000 А (400 кА), величина стандартного градиента P0 составляет 10-150 пОм/с, таковая стандартного экстраполированного градиента PХ0 составляет 10-20 пОм/с, а таковая стандартной кривизны C0 составляет 0,010 - 0,200 пОм/с2.
Все эти характеристики функционирования, пригодные для электролизера интенсивностью 400 кА, легко могут быть применены к электролизерам меньшей интенсивности, тем, что вышеуказанные величины сопротивления R, градиента P и кривизны C могут быть определены в виде относительного значения по отношению к интенсивности I' < I, т.е. силе тока, проходящего через эти катализаторы, таким образом, что:
R' = R • 400/I'
P' = P • 400/I'
C' = C • 400/I'.
Изобретение подробнее поясняется, исходя из нижеприводимого подробного описания его осуществления.
Пример осуществления
Способ согласно изобретению осуществляют в течение нескольких месяцев при использовании прототипов электролизера с прошедшими предварительную тепловую обработку анодами, загружаемых, при силе тока 400000 А в следующих условиях:
Оксид алюминия прямо вводят в расплавленную электролитическую ванну в виде последовательных порций постоянной массы через несколько отверстий для введения поддерживаемых постоянно открытыми за счет разбивки корки. Для этой цели предпочтительно используют устройство для точечной загрузки оксида алюминия в электролизеры, такое, как описанное в европейском патенте 044794 (= патент США 4431491) или еще в патенте Франции 2527647 (= патент США 4437964) на имя заявителя.
Расчет сопротивления R осуществляют каждые десять секунд, исходя из измерений силы тока I и напряжения U на клеммах электролизера, по классическому соотношению: R (Ом) = U (В)- 1,65/ 1 (А).
Счетно-решающее устройство с интегрирующим элементом позволяет определять средние значения сопротивлений r (k) каждые 10 секунд или мгновенных сопротивлений r (k) внутри цикла регулированы (i) продолжительностью T = 3 минуты и после исключения, если необходимо, первых значений цикла регулирования, соответствующих периоду операций регулирования анодной рамки, которые изменяют уровень сопротивления; рассчитывают среднее сопротивление R (k) цикла и средние градиенты dr(k) = r(k) - r(k-1) для остальной продолжительности цикла, затем путем линейной регрессии в отношении значений dr (k), введенных в запоминающее устройство, начиная с начала фазы 1, в пределах N 360 последних значений, определяют градиент P, экстраполированный градиент PX и кривизну C =dP/dP.
Затем следствием сравнения таким образом рассчитанных величин P, PX и C с соответствующими стандартными (заданными) значениями является через посредство цепи контролируемого управления проведение соответствующих операций по дозированию - распределению оксида алюминия. Эти стандартные (заданные) величины в настоящем случае представляют собой следующие: P0 = 66 пОм/с; PX0 = 110 пОм/с; C0 = 0,065 пОм/с2.
Средний расход в час оксида алюминия для электролизера на 400000 А составляет величину порядка 230 кг оксида алюминия в час, что соответствует стандартной скорости или теоретически рассчитанной скорости загрузки CT. По отношению к этой стандартной скорости, например, определяют:
C-L (медленная скорость) = СТ - 25%, или 173 кг оксида алюминия в час; используемая в первой фазе загрузки 1.
CR (быстрая скорость) = СТ + 25%, или 288 кг оксида алюминия в час;
CUR (ультрабыстрая скорость) = 4 СТ, или 920 кг оксида алюминия в час, причем скорости CR и CUR используют в фазе загрузки 2.
В случае функционирующего в нормальных условиях электролизера и загрузки в фазе 1 типичная последовательность регулирования содержания оксида алюминия следующая:
а) В конце цикла (i) продолжительностью 3 минуты находят:
R (i) = 5.924) μОм; PX(i) = 31 пОм/с;
P (i) = 26 пОм/с; C(i) = 0,028 пОм/с2
Фазу 1 загрузки продолжают.
б) В конце цикла (i + 1), если величины P(i + 1) и PX(i + 1) остаются ниже стандартных пороговых величин P0 = 65 пОм./с и PX0 = 110 пОм/с, продолжают фазу 1 загрузки.
в) В конце цикла (i + 2) находят:
R (i + 2) = 5,936 μОм; PX(i + 2) = 75 пОм/с;
P (i + 2) = 71 пОм/с; C(i + 2) = 0.022 пОм/с;
согласно чему начинают переход в фазу 2 загрузки с быстрой скоростью CR в течение продолжительности 12 минут (продолжительность, рассчитанная пропорционально градиенту в конце рассматриваемого цикла, по экспериментально найденному соотношению: продолжительность в минутах = 0,083 • P(i) + 6 (округленно в сторону увеличения до минуты); или в настоящем случае: 0,083 • 71 - 6 = примерно 12 минут).
г) фазу 2 загрузки продолжают вплоть до начала цикла (i + 7), где снова переходят в фазу 1 загрузки.
д) В конце цикла (i + 7) находят:
R (i+7) = 5,898 μОм; PX(i+7) = 10 пОм/с;
P (i + 7) = 7 пОм/с; C(i+7) = 0,017 пОм/с2.
продолжают фазу 1 загрузки.
е) В конце циклов (i+8) и (i+9) величины градиентов P (i+8) и P (i+9) и экстраполированных градиентов PX (i+8) и PX (i+9) остаются ниже их стандартного порогового значения, соответствующего P0 и PX0, и фазу 1 загрузки продолжают.
ж) В конце цикла (i+10) находят:
R (i+10) = 5.917 μ Ом; PX(i + 10) = 120 пОм/с;
P (i+10) = 108 пОм/с; C(i+10) = 0.067 пОм/с2;
фазу 2 загрузки начинают с самого начала загрузки с ультрабыстрой скоростью в течение предварительно определенной продолжительности 2 минуты (продолжительность загрузки с CL/R обычно составляет 1-5 минут для обеспечения быстрой загрузки ванны оксиду алюминия, однако, без риска насыщения впоследствии засорения электролизера).
Спустя 2 минуты фазу 2 загрузки переключают на быструю скорость в течение рассчитанной продолжительности 15 минут (0,083 • P(i + 10) + 6 [округленно в сторону увеличения до минуты]).
з) По истечении (2 + 15) = 17 минут, то есть в течение цикла (i + 16), снова переходят в фазу 1 загрузки.
и) В конце цикла (i + 16) значения P (i + 16) и PX(i + 16) остаются ниже стандартных пороговых величин P0 и PX0, фазу 1 загрузки продолжают и регулирование содержания оксида алюминия в электролитической ванне обычно осуществляют в вышеустановленном порядке.
При осуществлении таким образом более подробно описанного способа, спустя более 6 месяцев проведения, в опытных электролизерах на 400000 А, используя электролитическую ванну на основе криолита, содержащую 12%-ный избыток AlF3, следовательно, явно кислого характера, при температуре 950oC, содержание оксида алюминия "а" постоянно регулируют в пределах от 1,5% до 3,5% с центральным значением 2,1%.
Параллельно, средний фарадеевский выход по току составляет 95,6% и степень анодного эффекта составляет 0,018 АЭ/электролизер/день.
Технический результат - повышение точности регулирования. Изобретение основано на чередовании фаз недостаточной загрузки оксида алюминия и фаз избыточной загрузки оксида алюминия по отношению к режиму среднего теоретически рассчитанного расхода оксида алюминия в электролизере в зависимости от величин, рассчитываемых в конце каждого цикла (i) регулирования продолжительностью Т, среднего сопротивления R(i), измеряемого на клеммах электролизера, скорости изменения этого сопротивления или градиента сопротивления P(i), скорости эволюции градиента сопротивления или кривизны C(i) и экстраполированного градиента PX(i) = P(i) + C(i) х Т. Указанные величины сравнивают соответственно со стандартными (пороговыми) величинами Ро, Со и Рхо. Согласно соответствующему алгоритму регулирования содержание оксида алюминия в ванне поддерживается в очень узком диапазоне концентрации, составляющем от 1,5 до 3,5%. 21 з.п.ф-лы, 3 ил.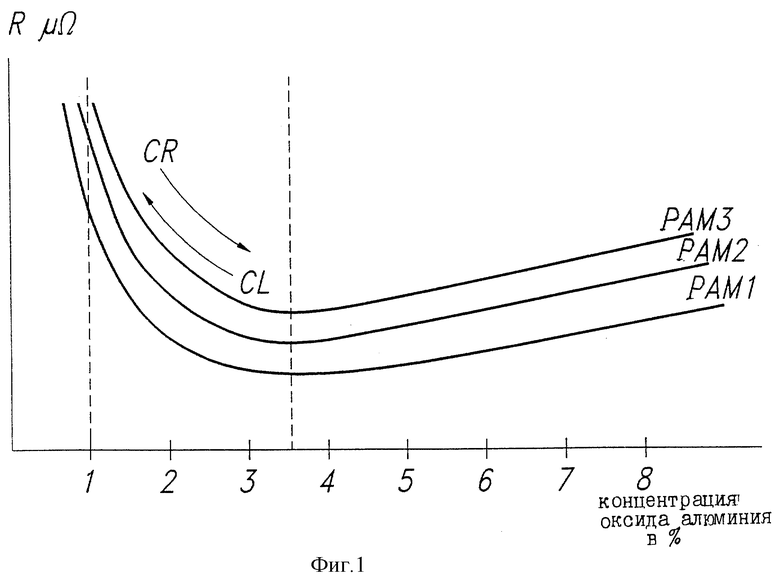
dr(k) = r(k) - r(k-1)
для значений средних сопротивлений элементарного цикла k, полученных при отсутствии перемещений анодного блока.
t(i + 1) = t(i) + Т.
R' = R • 400/J'; PX' = PX • 400/J';
Р' = Р • 400/J'; С = C • 400/J',
где R', P', PX', C' - соответственно сопротивление, градиент сопротивления, экстраполированный градиент и скорость изменения градиента сопротивления для электролизера с силой тока J'.
| Устройство для укрепления рамы саней на лыжах | 1934 |
|
SU44794A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ЭЛЕКТРОЛИТИЧЕСКОГО ПОЛУЧЕНИЯ АЛЮМИНИЯ В ЭЛЕКТРОЛИЗЕРЕ | 1990 |
|
RU2023058C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВЫСШИХ АЛИФАТИЧЕСКИХ СПИРТОВ | 0 |
|
SU386899A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОЛБАСНЫХ ИЗДЕЛИЙ ИЗ МЯСА ТЮЛЕНЯ | 2014 |
|
RU2581660C1 |
| US 4447301, 08.05.1984. | |||

