Способ относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения, и может быть использован при построении систем определения местоположения земных станций спутниковой связи. Известен способ определения местоположения земной станции спутниковой связи [см. авт. свид. PCT (WO) N 94/22032, кл. G 01 S 5/02, 1/16, 13/00 от 29.09.94). Данный способ предусматривает прием наземной опорной системой сигналов 25 глобальной спутниковой системой радиоопределения 20, измерение опорной системой несущей частоты этих сигналов, выработку и излучение опорной системой сигнала инициализации 27 и сигнала 30 для канала передачи данных, который несет информацию о результатах фазовых измерений, полученных в приемниках опорной системы, прием мобильной системой, местоположение которой необходимо определить, сигналов 25, 27, 30, выработке приемником мобильной системы некоторых величин, обеспечивающих разрешение неоднозначности при приеме сигналов на основе результатов фазовых измерений, полученных на этапе инициализации приемниками опорной и мобильной систем, и использовании этих величин для получения точных данных о местоположении искомой земной станции спутниковой связи.
Однако указанный аналог имеет недостатки. Например, его реализация приводит к очень высокой стоимости как развертывания, так и эксплуатации системы, его реализующего, т. к. необходимо создавать как многоспутниковую космическую группировку, так и многостанционную наземную опорную систему. Высокая сложность системы его реализующего.
Наиболее близким по своей технической сущности по отношению к заявленному способу является пассивный способ определения местоположения земной станции по ретранслированному сигналу [1]. Способ-прототип заключается в следующем: через спутник-ретранслятор (СР) принимают сигнал от земной станции, измеряют Q значений доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник-ретранслятор - приемная земная станция" с шагом Δt, запоминают эти значения, обрабатывают их и на основе обработки вычисляют Q значений доплеровского сдвига несущей частоты сигнала для трассы "спутник - земная станция", интегрируют их на двух различных интервалах времени, соответствующих выбранной паре пеленгационных баз и определяют разностно-дальномерным методом местоположение земной станции. При таком способе обеспечивается определение местоположения земной станции без создания специальной орбитальной группировки спутников, а только за счет приема и соответствующей обработки сигнала от спутника-ретранслятора, через который она осуществляет спутниковую радиосвязь.
Однако способ-прототип имеет недостатки:
- низка точность определения местоположения земной станции по ретранслированному сигналу, т.к. не реализованы методы выбора оптимальных, с точки зрения повышения точности, пеленгационных баз, не проводится статистическая обработка полученных координат земной станции;
- узка область применения способа, так как он применяется для СР на низких и средних орбитах и не применяется для СР на геостационарной орбите (ГСО).
Целью заявленного объекта изобретения является разработка способа определения местоположения земной станции по ретранслированному сигналу, обеспечивающего повышение точности определения местоположения земной станции и одновременно не удорожающего стоимость системы, его реализующего.
Поставленная цель в заявленном способе достигается тем, что в известном способе, заключающемся в приеме сигнала от земной станции на приемной земной станции, измерении Q значений доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник- приемная земная станция" в соответствующие моменты времени ti с временным шагом Δt, их обработке и на основе обработки вычисление Q значений доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник", запоминании этих Q значений и соответствующих им моментов времени ti, интегрировании на двух различных интервалах времени, соответствующих выбранной паре пеленгационных баз, и определении разностно-дальномерным методом местоположения земной станции. После запоминания Q значений доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник" и соответствующих моментов времени t1 вычисляют размер максимальной пеленгационной базы Вм, запоминают его, группируют попарно все возможные сочетания пеленгационных баз на интервале Q значений с шагом n = ΔT/Δt, где ΔT>Δt. Сравнивают размеры баз в сгруппированных парах с пороговым значением ВПОР. Выделяют пары баз, в которых обе базы не короче порогового значения ВПОР. Измеряют угол между базами в выделенных парах баз. Сравнивают измеренный угол с пороговым значением УПОР. Выбирают пары пеленгационных баз, в которых угол между ними не менее УПОР. И уже для каждой из выбранных пеленгационных пар баз интегрируют на соответствующем каждой базе интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы "спутник - земная станция" и определяют разностно-дальномерным методом местоположение земной станции. После определения местоположения земной станции для каждой из выбранных пар пеленгационных баз запоминают координаты земной станции, усредняют запомненные координаты, а результат усреднения и определяют как окончательное местоположение земной станции.
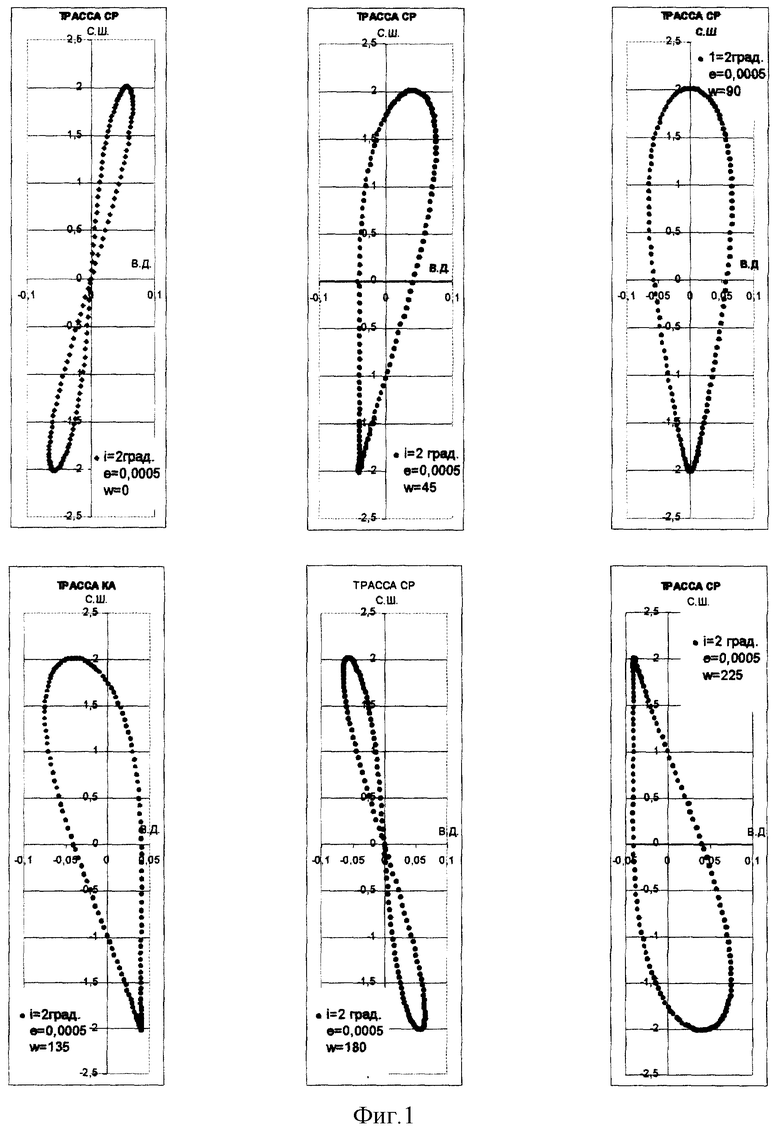
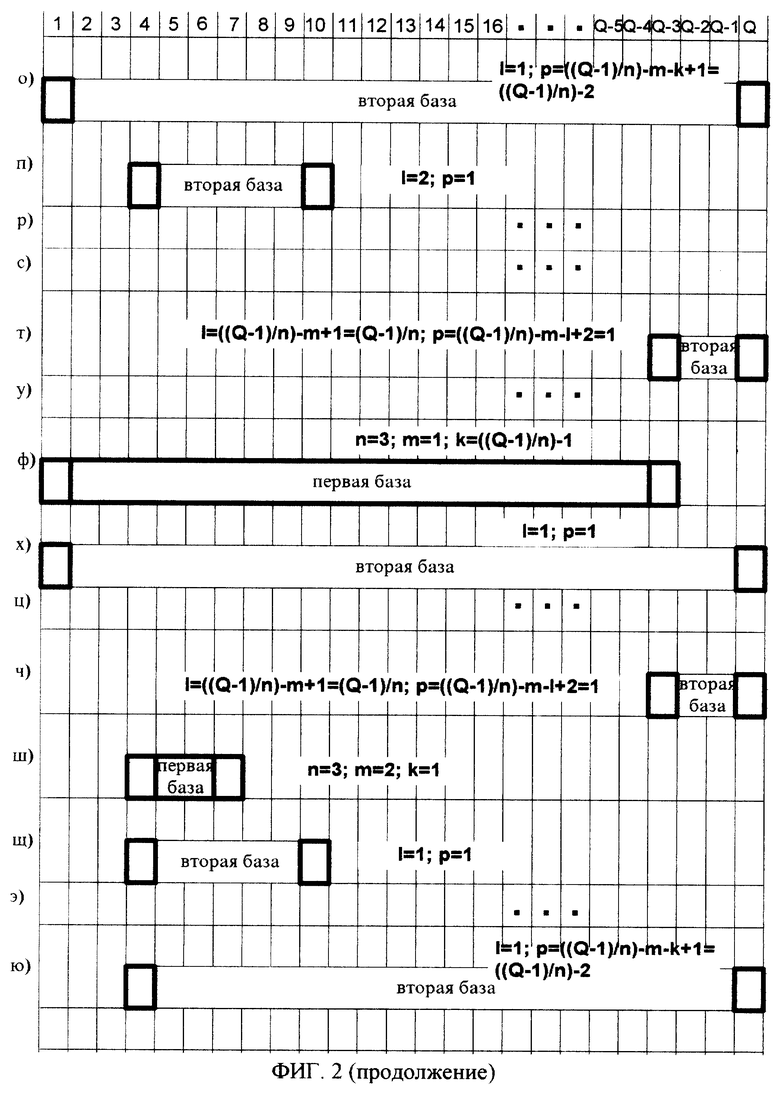
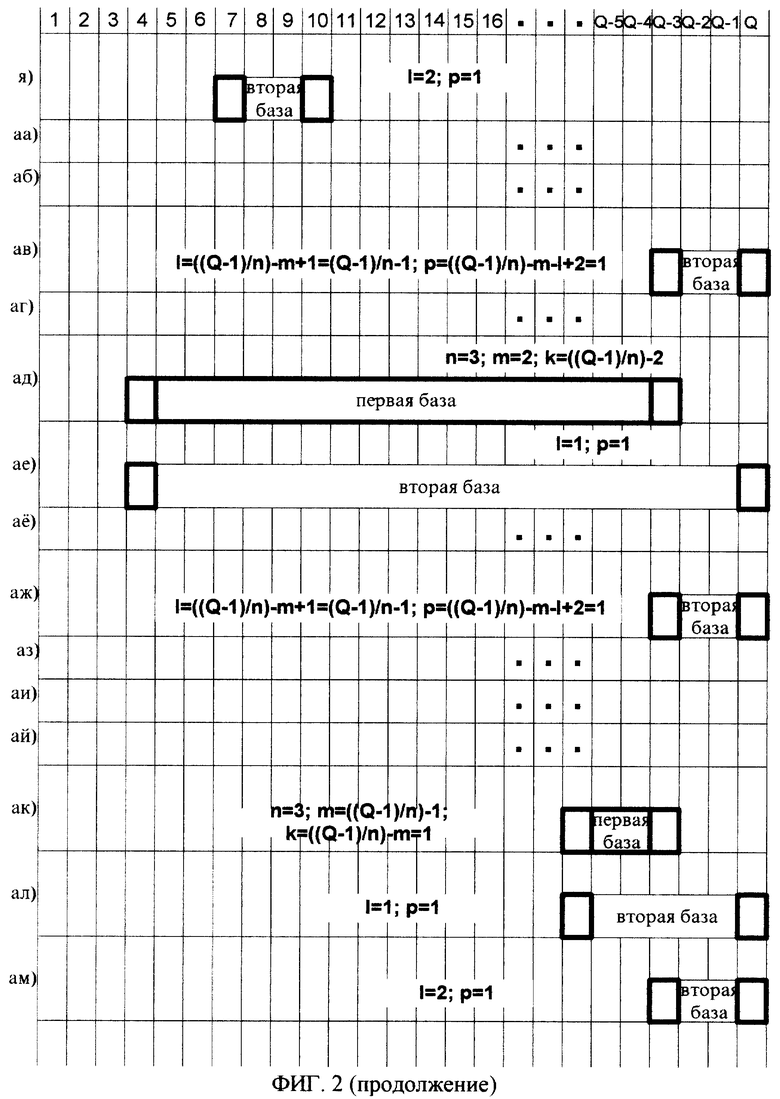
При группировании попарно всех возможных сочетаний пеленгационных баз на интервале Q значений доплеровского сдвига несущей частоты сигнала (и при условии, что в соответствующие им моменты времени координаты СР известны) номеру m присваивают последовательно значения m=1,2,3,..., ((Q-l) Δt/ΔT)-l, номеру k присваивают последовательно значения k = 1,2,3, . .., ((Q-1) Δt/ΔT)-m, после чего для каждой пары значений m и k формируют первые базы в группируемых парах пеленгационных баз, соответственно начальной координате A которых последовательно присваиваются значения с номерами
1+(m-1)ΔT/Δt,
конечной координате B
A+kΔT/Δt,
номеру 1 присваивают последовательно значения l=1,2,3,..., ((Q-l) Δt/ΔT) -m+1, номеру p присваиваются последовательно значения в случае, если k-l+1≥0 p= 1,2,3, . . . , ((Q-l) Δt/ΔT)-m-k+1, если l-k-1>0 p= 1,2,3, . . . , ((Q-l Δt/ΔT)-m-l+2,
после чего для каждой пары значений 1 и p формируют вторые базы в группируемых парах пеленгационных баз, соответственно начальной координате C которых последовательно присваиваются значения с номерами
A+(l-1)ΔT/Δt,
конечной координате D: если k+l+1≥0 B+pΔT/Δt, если l-k-1>0 C+pΔT/Δt.
Таким образом, каждой четверке значений m, k, l, p, принадлежащих выбранным интервалам, соответствует вполне определенная пара пеленгационных баз. Первой базе пары соответствуют координаты с номерами A-B, а второй C-D.
Общее число Q измеренных значений доплеровского сдвига частоты для трассы "земная станция - спутник - приемная земная станция" и вычисленных значений доплеровского сдвига для трассы "земная станция - спутник" выбирают из условия  а значения Δt выбирают в пределах Δt=30...6000 с, а временной шаг формирования пеленгационных баз ΔT выбирают в пределах ΔT = (1...20)Δt, а пороговое значение ВПОР выбирают в пределах ВПОР=(0,8-0,95)Вм, а пороговое значение угла между базами УПОР выбирается в зависимости от вида орбиты спутника в пределах УПОР=(0,1-10) град.
а значения Δt выбирают в пределах Δt=30...6000 с, а временной шаг формирования пеленгационных баз ΔT выбирают в пределах ΔT = (1...20)Δt, а пороговое значение ВПОР выбирают в пределах ВПОР=(0,8-0,95)Вм, а пороговое значение угла между базами УПОР выбирается в зависимости от вида орбиты спутника в пределах УПОР=(0,1-10) град.
Указанная выше совокупность существенных признаков, благодаря выбору оптимальных, с точки зрения точности определения местоположения земной станции, пеленгационных баз, а также статистической обработке полученных таким образом координат земной станции, позволяет повысить точность определения местоположения земной станции по ретранслированному сигналу.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественными всем признакам заявленным техническим решениям, отсутствуют, что указывает на соответствие заявленных изобретений условию патентоспособности "новизна".
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного объекта, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанных технических результатов. Следовательно, заявленное изобретение соответствует условию патентоспособности "изобретательский уровень".
Заявленный способ поясняется чертежами:
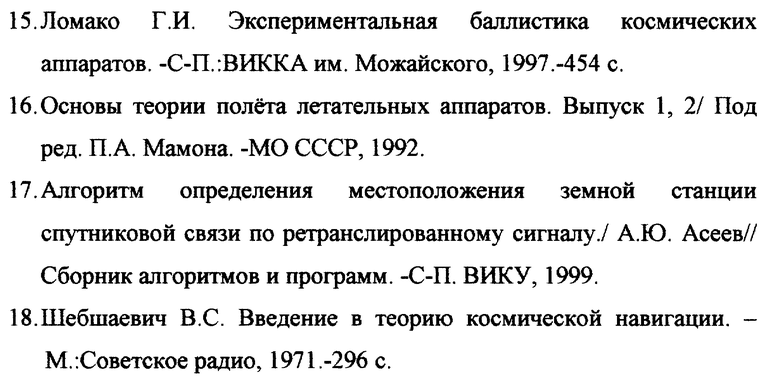
фиг.1 - рисунок, показывающий характерные формы трасс СР на ГСО, для различных параметров орбиты;
фиг. 2 - рисунок, поясняющий формирование всех возможных сочетаний пар пеленгационных баз в предлагаемом способе определения местоположения;
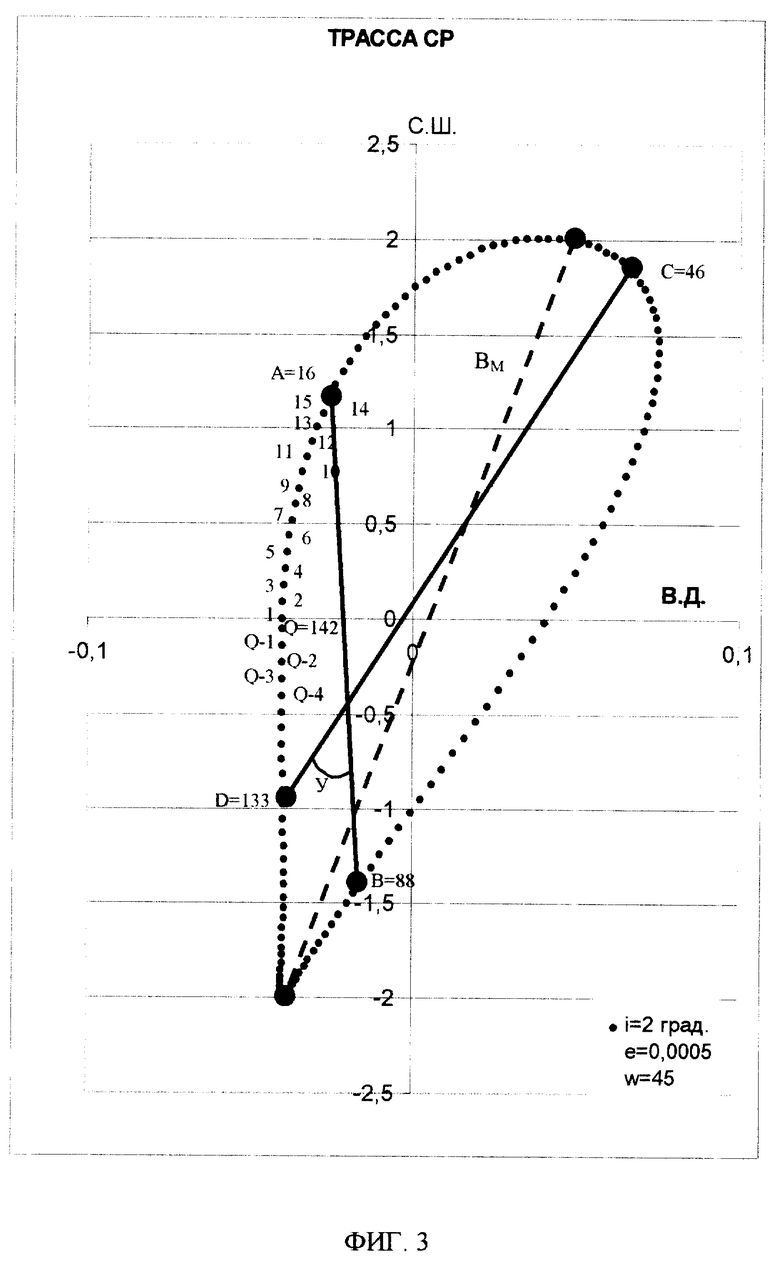
фиг.3 - пример пары пеленгационных баз, формируемых на основе имеющегося множества координат орбиты СР на ГСО.
Возможность реализации заявленного способа объясняется следующим образом.
Применение способа предполагается в основном для систем спутниковой связи, базирующихся на геостационарных спутниках-ретрансляторах. Причем, считается, что на этапе приема, измерения и запоминания параметров местоопределения земная станция неподвижна, а координаты спутника-ретранслятора в любой момент времени известны с необходимой точностью.
Орбита идеального геостационарного СР - это круговая (эксцентриситет e= 0), экваториальная (наклонение i=0), синхронная орбита с периодом обращения, равным периоду вращения Земли (звездные сутки), что составляет 23 ч 56 мин 04 с, с движением СР в восточном направлении. СР на геостационарной орбите окажется "висящим" над определенной точкой земной поверхности (на определенной долготе над экватором) на высоте 35875 км над поверхностью Земли. Однако из-за неизбежного отклонения параметров ГСО от необходимых значений при запуске СР, а также из-за возмущающих факторов, нарушающих строго центральное гравитационное поле, движение реального СР на ГСО всегда несколько отличается от идеального геостационарного. Если отклонения параметров не велики, то такая орбита называется квазистационарной (КСО). Практически удается реализовать только КСО.
СР на КСО за счет отклонения параметров от номинальных значений и действующих возмущений не является "висящим" над некоторой точкой поверхности Земли, а совершает колебательные движения. Эти колебания приводят к изменению наклонной дальности от наземной станции спутниковой связи до СР.
Динамическое изменение положения спутника относительно ЗС приводит к возникновению так называемого эффекта Доплера или доплеровскому сдвигу частоты.
Кратко рассмотрим влияние неточности первоначальных параметров орбиты на движение геостационарного СР. Отличие периода обращения СР от звездных суток на некоторую величину TΔ приводит к изменению долготы СР за время одного оборота вокруг Земли на величину Δλ = -ω3•TΔ, где ω3 - угловая скорость вращения Земли, TΔ = Tc- Tз, где T3 - звездные сутки, Tс - период обращения спутника (так называемый сидерический). Если Tс>T3, то Δλ<0, и спутник смещается в западном направлении, отставая от движения Земли, и наоборот.
Если орбита СР не является точно круглой, а обладает небольшим эксцентриситетом e (e<<1), но при этом период обращения точно равен необходимой величине (Tс= T3, ), то СР будет колебаться по долготе около среднего положения λн по закону [3] λ = λн+2e•sinϑ с амплитудой 2e, где ϑ - истинная аномалия.
Отличие орбиты от строго экваториальной (наклонение i≠0) при малом наклонении вызывает колебания спутника, причем преобладают колебания по широте, определяемые законом [3].
Φ = arcsin(sin u sin i),
где Φ- географическая широта подспутниковой точки;
u - аргумент широты спутника (угол между восходящим узлом орбиты и направлением на СР в плоскости орбиты).
Отсюда очевидно, что амплитуда колебаний по широте равна наклонению. Влияние наклонения орбиты на движение СР на КСО имеет особенно важное значение, поскольку наклонение орбиты возникает даже при первоначально строго экваториальной орбите вследствие не идеальности поля тяготения.
Трассы полета СР на КСО в интервале суток для различных вариантов орбит представлены на фиг. 1.
Предлагаемый алгоритм определения местоположения ЗС реализует разностно-дальномерный метод. В традиционном понимании, для определения местоположения некоторого объекта на поверхности земли необходимо иметь в пространстве, как минимум, две пеленгационных базы (или четыре пункта), для которых рассчитывается параметр местоопределения - разность дальностей (Δd) до ЗС.
В нашем случае предлагается этими пунктами считать СР, который осуществляет движение по орбите, и оказывается возможным определить Δd для различных пар точек его орбиты. Это будем называть синтезированием пространственно-временных пеленгационных баз системы местоопределения.
Параметр местоопределения от искомой ЗС до двух положений СР в различные моменты времени ti рассчитывается интегральным методом [1]. Сначала, на приемной ЗС (ПрЗС) измеряются значения доплеровского сдвига частоты для всей трассы, а затем, зная точные координаты СР в различные моменты времени, производится пересчет значений для трассы "земная станция - спутник"
где F
F
V
FНЛВВ - значение несущей частоты искомой ЗС на линии ЗС-СР или частота несущего колебания ЗС;
FК - значение частоты конвертирования (переноса частоты);
с = 299792456,2 м/с - скорость света в свободном пространстве.
А затем определяется Δd
где t1 и t2 - начальный и конечный момент интервала времени соответствующего выбранным пеленгационным базам соответственно.
Таким образом, на основе известных координат СР в различные моменты времени можно оценить Δd от различных точек орбиты СР для синтезированных пространственно-временных пеленгационных баз разностно-дальномерной системы местоопределения путем измерения значений доплеровского сдвига частоты на интервалах времени, соответствующих выбранным синтезированным пространственно-временным пеленгационным базам.
Определяем местоположение ЗС для отобранной пары баз, решая систему уравнений [4]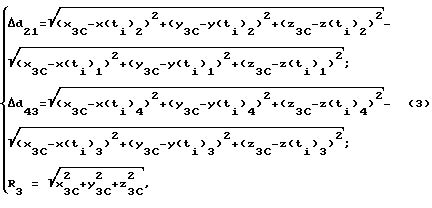
где xЗС, yЗС, zЗС - координаты ЗС; R3 - радиус Земли; x(ti)j, y(ti)j, z(ti)j - координаты СР в j-ом пункте орбиты СР; Δd21;Δd43 - разность наклонных дальностей для выбранных пространственно-временных пеленгационных баз 21 и 43 соответственно.
Факторами, влияющими на точность определения местоположения ЗС предложенным методом, являются:
- размер пространственно-временных пеленгационных баз;
- взаимное расположение баз.
Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу заключается в формировании всех возможных сочетаний пар пеленгационных баз с шагом ΔT, возникающих в процессе движения СР по орбите, измерении размера максимальной из них и последующем отборе пар, которые удовлетворяют условиям их взаимного расположения и размера. Для отобранных пар баз разностно-дальномерным методом определяют координаты земной станции и после усреднения результатов расчетов выносится решение о местоположении земной станции.
Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу основан на следующих утверждениях [9, стр. 36-43] :
Утверждение 1. Для разностно-дальномерного устройства спутниковой системы определения местоположения на КСО увеличение размеров пеленгационной базы уменьшает ошибку поверхности положения.
Справедливость этого утверждения хорошо просматривается в формуле ошибки определения поверхности положения [9, стр. 39]
где UПП - ошибка определения поверхности положения;
UΔd - ошибка измерения разности дальностей;
ψ - угол, под которым наблюдается база из места расположения ЗС.
Хорошо видно, что с возрастанием размера базы значение sinψ/2 увеличивается, что совершенно очевидно ведет к уменьшению ошибки определения поверхности положения.
Утверждение 2. Для разностно-дальномерного устройства спутниковой системы определения местоположения на КСО уменьшение угла пересечения пеленгационных баз увеличивает ошибку линии положения.
Действительно, согласно [9]
где UЛП - ошибка определения линии положения;
γ - угол между первой и второй поверхностями положения.
Причем величина угла γ в рассматриваемой спутниковой системе определения местоположения в большинстве случаев соответствует величине угла пересечения пеленгационных баз. А так как ошибка места определяется выражением
где Uм - ошибка определения местоположения ЗС;
γ1 - угол между линией положения и третьей поверхностью положения,
то для повышения точности определения местоположения ЗС необходимо отбирать пары пеленгационных баз достаточного размера, угол между которыми был бы не менее определенной величины.
Таким образом, сигнал от ЗС принимается на ПрЗС и в определенные моменты времени ti, с шагом Δt измеряется Q значений доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник - приемная земная станция". Для обработки: измеренным значениям F
Из полученной совокупности пар пеленгационных баз для дальнейшего процесса определения местоположения необходимо выделить пары, в которых обе базы были бы не меньше определенного размера ВПОР. ВПОР выбирается в пределах (0.8-0.95) от уже измеренной нами максимальной базы Вм, размер которой зависит прежде всего от таких параметров орбиты СР, как наклонение, эксцентриситет и аргумент широты перигея (W).
Для этого в каждой из полученной совокупности пар пеленгационных баз первую и вторую базу последовательно сравнивают по размеру с ВПОР и для дальнейшего процесса выбирают только те пары баз, где обе базы не короче ВПОР. Размеры баз легко рассчитываются, т.к. нам известны значения начальной и конечной координат соответствующей базы.
Для пар баз, прошедших отбор, измеряют угол между базами в парах У, сравнивают полученный угол с пороговым УПОР и для дальнейшего процесса определения местоположения выбирают пары пеленгационных баз, в которых угол между ними не менее УПОР. Выбор УПОР зависит прежде всего от таких параметров орбиты СР, как наклонение, эксцентриситет и аргумент широты перигея (W) и, как правило, лежат в пределах 0.1-10 град.
На фиг. 3, например, для измерений в течение около суток, с временным интервалом Δt = 600 с получено Q=142 значений доплеровского сдвига несущей частоты сигнала и для ΔT =1800 с с шагом n = ΔT/Δt = 3 и m=6, k=24, l=11, p= 15 сформирована предложенным способом пеленгационная пара баз:
- первая база с координатами под номерами A=16, В=88, которым соответствуют значения ti соответственно tА =16 Δt =9600 с и tВ=88 Δt =52800 с от начала измерений;
- вторая база с координатами под номерами C=46, D=133, которым соответствуют значения ti соответственно tс=46 Δt =27600 с и tD=133 Δt =79800 с от начала измерений.
Там же показан угол между первой и второй базами У.
Значения ВПОР и УПОР для конкретной орбиты СР можно выбирать также при контрольном определении местоположения опорной ЗС, координаты которой заранее известны, выбирая такие значения ВПОР и УПОР, при которых результаты определения местоположения опорной ЗС окажутся наилучшими.
Производится интегрирование запомненных значений доплеровского сдвига несущей частоты сигнала для трассы "спутник - земная станция" на двух различных интервалах времени, соответствующих каждой выбранной паре пеленгационных баз соответственно первый временной интервал для первой базы в каждой выбранной паре, а второй временной интервал для второй базы в каждой выбранной паре. Интегрирование осуществляют в соответствии с формулой (2) [1] одним из численных методов, например методом Симпсона [8, стр. 588-593]. Процесс интегрирования позволяет получить параметр определения местоположения Δd для соответствующей пеленгационной базы разностно-дальномерной системы определения местоположения. Например, для пары, баз обозначенных в строках а) и б), пределы интегрирования при определении Δd для первой базы: t1= Δt, t2= 4Δt, а для второй базы t1= Δt, t2= 7Δt.
Определяют разностно-дальномерным методом местоположение земной станции для отобранных пар пеленгационных баз, основным расчетным выражением для этого является (3). Запоминают координаты земной станции, усредняют запомненные координаты, а координаты, полученные в результате усреднения, и считают координатами окончательного местоположение земной станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ | 2010 |
|
RU2442996C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2640395C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2653866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЭПИЦЕНТРА ОЖИДАЕМОГО ЗЕМЛЕТРЯСЕНИЯ | 1999 |
|
RU2149427C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2755058C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ ДО ОБЪЕКТА С ПОДВИЖНОГО НАБЛЮДАТЕЛЯ | 1998 |
|
RU2155933C1 |
Способ относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения, и может быть использован при построении систем определения местоположения земных станций спутниковой связи. Достигаемым техническим результатом изобретения является разработка способа определения местоположения земной станции по ретранслированному сигналу, обеспечивающего повышение точности определения местоположения земной станции и одновременно не удорожающего стоимость системы, его реализующего. Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу заключается в приеме сигнала от земной станции на приемной земной станции, измерении Q значений доплеровского сдвига несущей частоты сигнала для трассы земная станция - спутник - приемная земная станция в соответствующие моменты времени ti, с шагом Δt, их обработке и на основе обработки вычисление Q значений доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник", запоминании Q этих значений и соответствующих моментов времени ti, группировании попарно всех возможных сочетаний пеленгационных баз на интервале Q значений с шагом n = ΔT/Δt, отборе пар баз, удовлетворяющих условиям размера и величине угла между ними, и уже для каждой из выбранной пары баз интегрируют на соответствующем каждой базе интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы "спутник - земная станция" и определяют местоположение земной станции, усредняют полученные координаты, а результат усреднения определяют как окончательное местоположение земной станции. 3 ил.
Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу, заключающийся в том, что принимают сигнал от земной станции на приемной земной станции, измеряют значения доплеровского сдвига несущей частоты сигнала для всей трассы "земная станция - спутник-приемная земная станция" в соответствующие моменты времени ti с шагом Δt, обрабатывают их, на основе обработки вычисляют значения доплеровского сдвига несущей частоты сигнала для трассы "земная станция-спутник", отличающийся тем, что общее число Q измеренных значений доплеровского сдвига частоты сигнала для трассы "земная станция - спутник-приемная земная станция" и вычисленных значений доплеровского сдвига частоты сигнала для трассы "земная станция - спутник" выбирают из условия  а значение Δt выбирают в пределах Δt = 30...6000 с, запоминают упомянутые Q значения и соответствующие им моменты времени ti, вычисляют размер максимальной пеленгационной базы, причем пеленгационной базой являются различные пары точек орбиты спутника, запоминают его, группируют попарно все возможные сочетания пеленгационных баз на интервале упомянутых Q значений с шагом n = ΔT/Δt, где ΔT - временной шаг формирования пеленгационных баз, сравнивают размеры пеленгационных баз в сгруппированных парах с пороговым значением, выделяют пары пеленгационных баз, в которых обе пеленгационные базы не короче порогового значения, измеряют угол между пеленгационными базами в выделенных парах пеленгационных баз, сравнивают измеренный угол с пороговым значением, выбирают пары пеленгационных баз, в которых измеренный угол между ними не менее порогового значения, и для каждой из выбранных пар пеленгационных баз интегрируют на соответствующем каждой пеленгационной базе интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник" и определяют разностно-дальномерным способом местоположение земной станции, а после определения местоположения запоминают координаты земной станции, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение земной станции.
а значение Δt выбирают в пределах Δt = 30...6000 с, запоминают упомянутые Q значения и соответствующие им моменты времени ti, вычисляют размер максимальной пеленгационной базы, причем пеленгационной базой являются различные пары точек орбиты спутника, запоминают его, группируют попарно все возможные сочетания пеленгационных баз на интервале упомянутых Q значений с шагом n = ΔT/Δt, где ΔT - временной шаг формирования пеленгационных баз, сравнивают размеры пеленгационных баз в сгруппированных парах с пороговым значением, выделяют пары пеленгационных баз, в которых обе пеленгационные базы не короче порогового значения, измеряют угол между пеленгационными базами в выделенных парах пеленгационных баз, сравнивают измеренный угол с пороговым значением, выбирают пары пеленгационных баз, в которых измеренный угол между ними не менее порогового значения, и для каждой из выбранных пар пеленгационных баз интегрируют на соответствующем каждой пеленгационной базе интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы "земная станция - спутник" и определяют разностно-дальномерным способом местоположение земной станции, а после определения местоположения запоминают координаты земной станции, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение земной станции.
| Путеводная звезда, которая светит всегда | |||
| НЕВДЯЕВ Л | |||
| Сети, 1998, № 6 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНЫХ КООРДИНАТ ДВУХ ОБЪЕКТОВ | 1990 |
|
RU1748516C |
| Приемное устройство вибрационного магнитометра | 1977 |
|
SU679901A1 |
| EP 0574009 A2, 15.12.1994 | |||
| EP 0869373 A2, 07.10.1998 | |||
| AU-B-55552/94, 22.06.1994. | |||
