Изобретение относится к области радиопеленгации, а именно к определению местоположения объектов - источников радиоизлучения (ИРИ).
Основным методом местоопределения ИРИ является пеленгационный. Этот метод обладает высокой разрешающей способностью, достоверностью и оперативностью при обработке больших потоков сигналов, принимаемых со всей области радиовидимости, однако имеет не очень высокие точностные характеристики, особенно при удалении ИРИ от подспутниковой точки.
Известен «Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу» (патент RU 2172495 C1, приоритет от 06.05.2000, МПК G01S 5/00, G01S 5/06). В способе принимают сигнал от искомой земной станции (ЗС) на приемной земной станции (ПрЗС), измеряют значения доплеровского сдвига несущей частоты сигнала для всей трассы «ЗС - спутник - ПЗС» в соответствующие моменты времени ti с шагом Δt, обрабатывают их. На основе обработки вычисляют значения доплеровского сдвига несущей частоты сигнала для трассы «ЗС - спутник». Общее число Q измеренных значений доплеровского сдвига частоты сигнала для трассы «ЗС - спутник - ПЗС» и вычисленных значений доплеровского сдвига частоты сигнала для трассы «ЗС - спутник» выбирают из условия  а значение Δt выбирают в пределах от 30 до 6000 с. Запоминают упомянутые значения Q и соответствующие им моменты времени ti. Вычисляют размер максимальной пеленгационной базы (ПБ), причем ПБ являются различные пары точек орбиты спутника, запоминают его. Группируют попарно все возможные сочетания ПБ на интервале упомянутых Q значений с шагом n=ΔT/Δt, где ΔT - временной шаг формирования ПБ. Сравнивают размеры ПБ в сгруппированных парах с пороговым значением, выделяют пары ПБ, в которых обе ПБ не короче порогового значения. Измеряют угол между ПБ в выделенных парах ПБ, сравнивают измеренный угол с пороговым значением. Выбирают пары ПБ, в которых измеренный угол не менее порогового значения, и для каждой из выбранных пар ПБ интегрируют на соответствующем каждой ПБ интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы «ЗС - спутник». Определяют разностно-дальномерным способом местоположение ЗС. Далее запоминают координаты ЗС, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение ЗС. Недостатком способа является высокий уровень погрешности при определении координат. На практике сложно обеспечить приемлемую точность данных измерений угла между ПБ в выделенных парах ПБ.
а значение Δt выбирают в пределах от 30 до 6000 с. Запоминают упомянутые значения Q и соответствующие им моменты времени ti. Вычисляют размер максимальной пеленгационной базы (ПБ), причем ПБ являются различные пары точек орбиты спутника, запоминают его. Группируют попарно все возможные сочетания ПБ на интервале упомянутых Q значений с шагом n=ΔT/Δt, где ΔT - временной шаг формирования ПБ. Сравнивают размеры ПБ в сгруппированных парах с пороговым значением, выделяют пары ПБ, в которых обе ПБ не короче порогового значения. Измеряют угол между ПБ в выделенных парах ПБ, сравнивают измеренный угол с пороговым значением. Выбирают пары ПБ, в которых измеренный угол не менее порогового значения, и для каждой из выбранных пар ПБ интегрируют на соответствующем каждой ПБ интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы «ЗС - спутник». Определяют разностно-дальномерным способом местоположение ЗС. Далее запоминают координаты ЗС, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение ЗС. Недостатком способа является высокий уровень погрешности при определении координат. На практике сложно обеспечить приемлемую точность данных измерений угла между ПБ в выделенных парах ПБ.
Известен «Угломестно-временной доплеровский способ определения координат аварийного объекта», принятый заявителем за прототип (патент RU 2302645 C1, приоритет от 16.02.2006, МПК G01S 5/02, H04B 7/185, B64G 3/00, G01C 21/00). Реализация разностно-дальномерного метода определения координат источников излучения радиоволн (ИИР) в прототипе осуществляется при организации одномоментного приема сигнала от ИИР с использованием баллистически связанной группировки из двух или трех космических аппаратов или, соответственно, группировкой летательных аппаратов. Предлагаемый способ заключается в измерении частоты Доплера беззапросным методом при появлении сигнала передатчика аварийного объекта в поле зрения приемной антенны космического аппарата. Предлагаемый способ может быть использован на космических аппаратах, находящихся на орбите искусственного спутника Земли, кромке геостационарной, стабилизируемых вращением вдоль вертикальной оси. Недостатками таких систем являются: высокая стоимость, постоянные изменения размеров баз в реальном полете, проблемы с устранением неоднозначности при приеме сигналов, особенно при увеличении размеров баз, сложность в организации управления процессами наблюдения и др.
Разностно-дальномерный метод (РДМ) местоопределения требует измерения времен прихода (либо их разностей) одного и того же сигнала в три (не обязательно различные) точки пространства по различным путям.
При этом в предположении, что сигнал распространяется в пространстве прямолинейно со скоростью света, разности времен приема сигнала пересчитываются в разности расстояний от точек приема до ИРИ.
Однако в зоне радиовидимости ИРИ имеется, как правило, только один КА (или ЛА) данной системы, и в некоторых случаях, в условиях многократного приема сигналов от неподвижного источника лишь одним приемником, размещенным на перемещающемся КА (или ЛА), может быть применен «квази-разностно-дальномерный» метод (квази-РДМ) определения местоположения источника радиоизлучения.
Применение квази-РДМ становится возможным, если излучение радиосигналов источником носит настолько регулярный характер, что, зная моменты излучения одного или нескольких сигналов, можно с большой точностью предсказывать моменты излучения последующих сигналов в течение длительного периода времени. Основываясь на этих предсказаниях можно «квази-синхронизировать» сигналы, полученные в разные моменты времени в разнесенных точках траектории КА (или ЛА), и рассчитать соответствующие этим точкам разности расстояний до ИРИ.
Простейший пример регулярного излучения - это периодическая последовательность сигналов, излучаемая с постоянным периодом Т. Для определения момента излучения очередного сигнала достаточно знать момент излучения одного (любого) из предыдущих сигналов и число сигналов, выпущенных в промежутке между ними.
Реально ряд радиоэлектронных средств использует сигналы с изменяющимися по определенному закону межимпульсными интервалами (т.н. «вобуляция периода»). В более сложном случае ИРИ осуществляет вобуляцию периода повторения сигналов, когда временные интервалы между соседними сигналами периодически повторяются: Т1, Т2, …, ТК, Т1, Т2. Такая последовательность может быть разбита на К периодических подпоследовательностей, каждая из которых имеет период
Таким образом, решение задачи местоопределения ИИР с вобуляцией периода повторения сигналов может быть сведено к решению более простой задачи, ориентированной на излучение сигналов с постоянным периодом.
Технический результат заявляемого изобретения заключается в упрощении процесса определения пространственных координат объекта с помощью системы космического или авиационного радиоэлектронного зондирования поверхности Земного шара, при этом используется только один КА (или ЛА) вместо многопозиционного пеленга с несколькими КА, и создании все более простых, дешевых, доступных технологий радиовидения, обеспечивающих их более широкое применение в различных практических задачах дистанционного зондирования Земли.
Для этого предлагается способ определения координат источников радиоизлучения (ИРИ), расположенных в заданном районе Земли, излучающих периодическую последовательность сигналов, заключающийся в том, что в заданном районе Земли создают во времени пространственную многопозиционную систему определения координат, отличающийся тем, что пространственную многопозиционную систему определения координат создают посредством приемной аппаратуры одного космического (КА) или летательного аппарата (ЛА), перемещающегося в пространстве и ведущего наблюдение за заданным районом Земли, для этого вычисляют время прихода в приемную аппаратуру КА (или ЛА) одних и тех же отдельных фрагментов излучаемой периодической последовательности сигналов путем интерполирования по времени этих фрагментов, принятых в разнесенных точках орбиты КА (или ЛА), обрабатывают приемной аппаратурой одного космического аппарата фрагменты сигналов, и, по разности между временами прихода реальных импульсов и вычисленными положениями импульсов на оси времени, определяют координаты ИРИ на поверхности земного шара радиодальномерным методом.
Источник, расположенный на поверхности Земли, излучает периодическую последовательность сигналов (возможно, с пропусками фрагментов этой последовательности).
Приемник сигналов, расположенный на борту КА (или ЛА), перемещается в пространстве и принимает сигналы от источника. В моменты приема каждого сигнала измеряются, с определенной точностью, координаты (широта, долгота, высота) КА (или ЛА) и время приема сигнала. При этом принимаются либо все излучаемые сигналы (с небольшими пропусками, связанными с ошибками или помехами приема), либо отдельные «пачки», состоящие из нескольких последовательных сигналов.
Имитировать разнесенные в пространстве измерения времени приема одного и того же сигнала при использовании одного и того же КА (или ЛА) можно, если сигнал можно интерполировать по времени (например, если он имеет периодические повторения одних и тех же фрагментов, так что, определив времена прихода этих фрагментов в разнесенных точках орбиты КА (или ЛА), можно вычислить времена прихода одного и того же фрагмента сигнала в этих точках орбиты).
Основной частью исходной информации для алгоритма определения местоположения ИРИ являются результаты измерения параметров сигналов, принятых аппаратурой, установленной на КА (или ЛА) в процессе его полета, а также навигационных данных о местоположении КА (или ЛА) в моменты приема сигналов.
Другую часть исходной информации составляет набор параметров, позволяющих выделить из всего множества принятых сигналов сигналы от одного и того же ИРИ. В первую очередь, это набор свойственных ИРИ радиотехнических параметров. Возможно также наличие априорной информации о районе его местоположения. В частности, эта информация может быть получена в результате радиопеленгации, произведенной путем обработки данных того же сеанса наблюдения, либо одного из предшествующих ему.
В любом случае, задаются границы зоны наблюдения, в пределах которой заведомо размещен источник радиоизлучения.
Способ определения пространственных координат источников радиоизлучения состоит в создании во времени пространственной многопозиционной системы за счет движения по орбите одного КА (или ЛА). КА (или ЛА) ведет наблюдение за заданным районом Земли, осуществляет прием и обработку сигналов ИРИ. Далее вычисляются разности между временами прихода реальных импульсов и вычисленными положениями импульсов на оси времени, где должны были находиться импульсы, если бы КА (или ЛА) не перемещался относительно ИИР.
Обработка полученной на КА (или ЛА) в процессе полета информации может быть произведена как на борту КА (или ЛА), так и на наземном комплексе приема и обработки переданной информации.
На фиг. 1 показана схема создания во времени пространственной многопозиционной системы группой из нескольких КА.
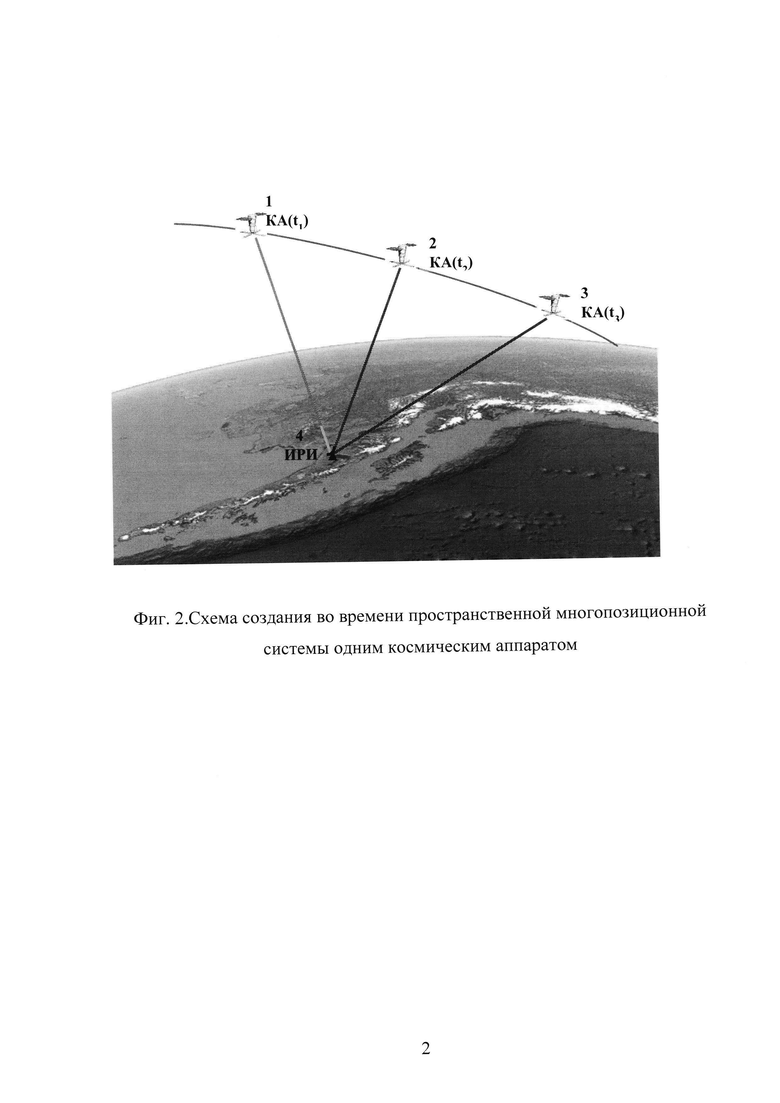
На фиг.2 показана схема создания во времени пространственной многопозиционной системы одним КА. Здесь:
1. Положение космического аппарата в момент времени t1 - КА(t1).
2. Положение космического аппарата в момент времени t2 - КА(t2).
3. Положение космического аппарата в момент времени t3 - КА(t3).
4. Источник радиоизлучения - ИРИ.
Заявляемый способ определения пространственных координат объекта осуществляется следующим образом (фиг. 2):
- создается во времени пространственная многопозиционная система за счет движения по орбите одного КА (или ЛА);
- вычисляются разности времен прихода Δti между реальными импульсами и вычисленными положениями импульсов на оси времени, где должны были находиться импульсы, если бы КА (или ЛА) не перемещался относительно ИРИ;
- вычисленные значения разностей хода Δti используются так же, как в традиционном РДМ.
Для реализации РДМ с помощью программного обеспечения необходимо выделить класс ИРИ, сигналы которых имеют периодическую структуру, научиться отождествлять разнесенные по времени излучения фрагменты одного и того же ИРИ (с использованием координат, полученных пеленгационным методом, и радиотехнических параметров сигналов), а также оценить погрешности вычисления Δti по формуле

где Т - период следования импульсов;
ni - целое количество периодов Т, прошедшее за интервал [ti ti+1].
Вычисленные значения разностей хода Δti используются так же, как в традиционном РДМ.
Формула (1) определяется точностью знания Т и величиной n. К такому классу можно отнести некоторых абонентов спутниковых систем связи и некоторые радиолокационные станции.
Рассмотрим возможности уточнения координат для импульсных ИРИ по результатам приема сигналов в одном сеансе наблюдения КА (или ЛА). При целевом планировании наблюдения совокупность наблюдений за сеанс одного и того же ИРИ представляет собой группу фрагментов сигнала, принятых в моменты времени t1, t2, … tn∈[tн.с. tк.с.], здесь
- tн.с. - время начала сеанса наблюдения;
- tк.c. - время окончания сеанса наблюдения.
Фрагмент сигнала импульсного ИРИ с номером i (i=1, 2, …) представляет собой пачку из некоторого количества импульсов, и пусть ti - время приема первого из них.
По каждой группе импульсов с использованием пеленгационного метода определяется оценка координат (широты, долготы), радиотехнические параметры сигнала: несущая частота, длительность импульсов, временные интервалы между ними и др. Этой информации вполне достаточно, чтобы произвести группирование потока фрагментов сигналов по принадлежности одному источнику излучения.
Достаточно большая часть современных ИРИ обладает определенной периодичностью излучений, заключающейся в посылке группы импульсов с постоянной, жестко заданной последовательностью интервалов между ними Т1, Т2, …, TK. В этом случае при известных значениях Т1, Т2, …,TK возникает возможность вычисления интервала времени, прошедшего между излучениями одноименных импульсов в разных пачках, принятых в различных точках пространства (в тех, где находился КА или ЛА в момент приема).
Таким образом, при реализации определения времени приема фрагментов сигналов с точностью 10-5 с, интервалов между импульсами примерно 10-7 с и точности местоопределения центра масс КА (или ЛА) порядка 300 м путем использования разностно-дальномерного метода возможно уточнение координат импульсных ИРИ, работающих периодическим излучением пачек импульсов, до величины порядка единиц км на дальности от подспутниковой точки до 3000 км, чего не может дать пеленгационный метод.
Алгоритм уточнения координат импульсных ИРИ должен состоять из следующих этапов:
1. Идентификация сигналов ИРИ, принадлежащих одному источнику, принятых в разные моменты времени ti, tj, производится по следующему критерию

Здесь:
 - вектора измеренных координат i-ого и j-ого сигналов;
- вектора измеренных координат i-ого и j-ого сигналов;
Qi, Qj - корреляционные матрицы измеренных координат i-ого и j-ого сигналов;
 - пороговое значение для идентификации сигналов от одного ИРИ
- пороговое значение для идентификации сигналов от одного ИРИ 
ϕi, ϕj - широта;
λj, λj - долгота.
2. Путем корреляционной обработки всех последовательностей {T1i, T2i, … TKi} оценивается период повторения пачек импульсов T∑.
3. Определяются усредненные координаты  для
для  отождествившихся отметок по формуле
отождествившихся отметок по формуле
4. Вычисляются:
- дальности d1, d2, …, dn от точки  до точек расположения КА (или ЛА) в моменты времени t1, t2, …, tn приема идентифицированных между собой сигналов
до точек расположения КА (или ЛА) в моменты времени t1, t2, …, tn приема идентифицированных между собой сигналов  где xi yi, zi - координаты КА (или ЛА) в момент измерения i-ого фрагмента сигнала; а х0, у0, z0 - декартовы гринвичские координаты точки
где xi yi, zi - координаты КА (или ЛА) в момент измерения i-ого фрагмента сигнала; а х0, у0, z0 - декартовы гринвичские координаты точки  ;
;
- величины Δt`i=(di-di-1)/c;
- величины δti=t`i-t`i-1-Δt`i, где t`i, t`i-1 - времена приема импульсов, соответствующих пересечению последовательностей {T1i, T2i, … Tki}∩{T1i-1, T2i-1, … Tmi-1}, и моменты  - приема одноименных импульсов в точках пространства xi, yi, zi;
- приема одноименных импульсов в точках пространства xi, yi, zi;
- количества пачек импульсов, излученных между моментами времени ti, ti-1, ni=δti/T∑ (при этом n должно быть целым положительным числом);
- уточняется величина периода повторения пачек импульсов T∑ по формуле T∑=(∑niδti)/∑ni2.
5. Вычисляются гипотетические времена приема первой из принятых пачек импульсов в точках пространства xi, yi, zi.
6. Решается уравнение

где  - вектор измеряемых параметров;
- вектор измеряемых параметров;
 - вектор оцениваемых параметров;
- вектор оцениваемых параметров;
 - вектор навигационных параметров;
- вектор навигационных параметров;
R - корреляционная матрица вектора измеряемых параметров;
 - функция зависимости истинных значений измеряемых параметров от
- функция зависимости истинных значений измеряемых параметров от 
Причем в качестве нулевого приближения используются координаты точки  , а в качестве измерений - вектор, составленный из разностей t^i-t^1. Итерации выполняются до тех пор, пока
, а в качестве измерений - вектор, составленный из разностей t^i-t^1. Итерации выполняются до тех пор, пока  где ε выбирается исходя из реальных возможностей местоопределения (ε≈10-5).
где ε выбирается исходя из реальных возможностей местоопределения (ε≈10-5).
В итоге по уточненным координатам ИРИ определяется его местоположение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2755058C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ И НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО СИГНАЛАМ РАДИОИЗЛУЧЕНИЯ ИХ БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2015 |
|
RU2599984C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2011 |
|
RU2506605C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКОМ РАДИОИЗЛУЧЕНИЯ | 2010 |
|
RU2439800C1 |

Изобретение относится к области радиопеленгации, а именно к определению местоположения объектов - источников радиоизлучения (ИРИ). Технический результат заключается в упрощении процесса определения пространственных координат объекта с помощью системы космического или авиационного радиоэлектронного зондирования поверхности Земного шара. В способе определения координат ИРИ, расположенных в заданном районе Земли, излучающих периодическую последовательность сигналов, в заданном районе Земли создают во времени пространственную многопозиционную систему определения координат посредством приемной аппаратуры одного космического (КА) или летательного аппарата (ЛА), перемещающегося в пространстве и ведущего наблюдение за заданным районом Земли. Для этого вычисляют время прихода в приемную аппаратуру КА (или ЛА) одних и тех же отдельных фрагментов излучаемой периодической последовательности сигналов путем интерполирования по времени этих фрагментов, принятых в разнесенных точках орбиты КА (или ЛА). Затем обрабатывают приемной аппаратурой одного космического аппарата фрагменты сигналов и, по разности между временами прихода реальных импульсов и вычисленными положениями импульсов на оси времени, определяют координаты ИРИ на поверхности земного шара радиодальномерным методом. 2 ил.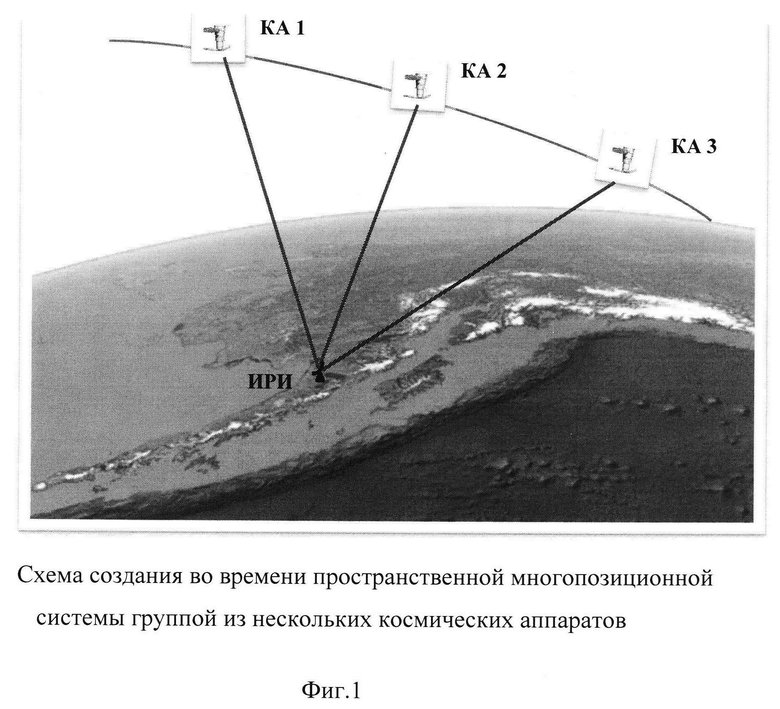
Способ определения координат источников радиоизлучения (ИРИ), расположенных в заданном районе Земли, излучающих периодическую последовательность сигналов, заключающийся в том, что в заданном районе Земли создают во времени пространственную многопозиционную систему определения координат, отличающийся тем, что пространственную многопозиционную систему определения координат создают посредством приемной аппаратуры одного космического (КА) или летательного аппарата (ЛА), перемещающегося в пространстве и ведущего наблюдение за заданным районом Земли, для этого вычисляют время прихода в приемную аппаратуру КА (или ЛА) одних и тех же отдельных фрагментов излучаемой периодической последовательности сигналов путем интерполирования по времени этих фрагментов, принятых в разнесенных точках орбиты КА (или ЛА), обрабатывают приемной аппаратурой одного космического аппарата фрагменты сигналов и, по разности между временами прихода реальных импульсов и вычисленными положениями импульсов на оси времени, определяют координаты ИРИ на поверхности земного шара радиодальномерным методом.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА ИМПУЛЬСНЫХ РАДИОСИГНАЛОВ | 2018 |
|
RU2695321C1 |
| Способ глобальной активно-пассивной многопозиционной спутниковой радиолокации земной поверхности и околоземного пространства и устройство для его осуществления | 2019 |
|
RU2700166C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| УГЛОМЕСТНО-ВРЕМЕННОЙ ДОПЛЕРОВСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ АВАРИЙНОГО ОБЪЕКТА | 2006 |
|
RU2302645C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2005 |
|
RU2283505C1 |
| СПОСОБ МЕСТООПРЕДЕЛЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2002 |
|
RU2248584C2 |
| US 6255992 B1, 03.07.2001 | |||
| CN 108363037 A, 03.08.2018 | |||
| US 9128173 B1, 08.09.2015 | |||
| EP 3417310 A1, 26.12.2018. | |||

