Изобретение относится к области спутникового радиоконтроля и может быть использовано при поиске и локализации земных станций спутниковой связи (далее по тексту ЗС) - источников помех стволам с прямой ретрансляцией спутников-ретрансляторов на геостационарной орбите (далее по тексту CP).
Известен способ определения местоположения земной станции по ретранслированному сигналу в описании изобретения к патенту РФ №2172495, МПК G01S 5/00, G01S 5/06 от 06.05.2000, опубл. 20.08.2001, заключающийся в том, что принимают сигнал от земной станции на приемной земной станции, измеряют значения доплеровского сдвига несущей частоты сигнала для всей трассы "земная станция-спутник-приемная земная станция" в соответствующие моменты времени ti с шагом Δt, обрабатывают их, на основе обработки вычисляют значения доплеровского сдвига несущей частоты сигнала для трассы "земная станция-спутник". Общее число Q измеренных значений доплеровского сдвига частоты сигнала для трассы "земная станция - спутник-приемная земная станция" и вычисленных значений доплеровского сдвига частоты сигнала для трассы "земная станция - спутник" выбирают из условия 100≤Q≤86400/Δt, а значение Δt выбирают в пределах Δt=30…6000 с, запоминают упомянутые Q значения и соответствующие им моменты времени ti, вычисляют размер максимальной пеленгационной базы, причем пеленгационной базой являются различные пары точек орбиты спутника, запоминают его, группируют попарно все возможные сочетания пеленгационных баз на интервале упомянутых Q значений с шагом n=ΔT/Δt, где ΔТ - временной шаг формирования пеленгационных баз, сравнивают размеры пеленгационных баз в сгруппированных парах с пороговым значением, выделяют пары пеленгационных баз, в которых обе пеленгационные базы не короче порогового значения, измеряют угол между пеленгационными базами в выделенных парах пеленгационных баз, сравнивают измеренный угол с пороговым значением, выбирают пары пеленгационных баз, в которых измеренный угол между ними не менее порогового значения, и для каждой из выбранных пар пеленгационных баз интегрируют на соответствующем каждой пеленгационной базе интервале времени запомненные значения доплеровского сдвига несущей частоты сигнала для трассы "земная станция-спутник" и определяют разностно-дальномерным способом местоположение земной станции, а после определения местоположения запоминают координаты земной станции, усредняют запомненные координаты, а результат усреднения определяют как окончательное местоположение земной станции.
Недостатки: сложность реализации способа, так как дополнительно требуются внешний источник данных об эфемеридах перемещения спутника в окрестностях номинальной орбитальной позиции и специальная многостанционная наземная система для устранения неоднозначности определения местоположения ЗС.
Известен наиболее близкий аналог (прототип) - способ определения местоположения земной станции спутниковой связи в описании изобретения к патенту РФ №2442996, МПК G01S 5/00, G01S 5/06 от 27.08.2010, опубл. 20.02.2012, заключающийся в приеме и измерении параметров ретранслируемых сигналов ЗС на станции спутникового радиоконтроля (далее по тексту СРК), обработке измерений, анализе результатов обработки и на этой основе определении местоположения ЗС. При приеме сигналов на станции СРК в дискретные моменты времени с шагом Δt, при Δt=const, измеряют уровни ретранслируемых сигналов от одновременно работающих через спутник-ретранслятор опорных ЗС с известными географическими координатами и искомой ЗС, регистрируют результаты измерений в виде последовательностей дискретных отсчетов, равных уровням сигналов yq(n), где q=1, 2, …, Q - нумерация ЗС, n=0, 1, 2, …, N - нумерация отсчетов, последовательности дискретных отсчетов yq(n) записывают в текстовые файлы и представляют в виде графических зависимостей, с помощью визуального анализа этих зависимостей выявляют долговременные циклические повторения падения уровня сигналов на фоне короткоживущих высокочастотных компонентов, связывают падение уровня сигналов с их ослаблением при прохождении трасс «ЗС-спутник-ретранслятор» через области объемно распределенных гидрометеоров (далее по тексту ОРГ), при условии выявления падений уровня сигналов текстовые файлы обрабатывают на персональной электронной вычислительной машине (далее по тексту ПЭВМ) в среде MathLab программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка 1, получают детализирующие вейвлет-коэффициенты ld,n, где d=1, 2, …, D - нумерация уровней декомпозиции последовательностей дискретных отсчетов yq(n), при D≤log2N, детализирующие вейвлет-коэффициенты ld,n представляют в виде графических зависимостей от уровней d и номеров отсчетов n, по графическим зависимостям вейвлет-коэффициентов ld,n в разном масштабе на уровнях d анализируют параметры циклических повторений (начало, продолжительность, количество) падения уровня каждого сигнала по отношению к другим, с помощью визуального анализа выявляют сходство этих параметров между искомой ЗС и хотя бы одной из опорных ЗС, причиной данного сходства считают прохождение трасс «ЗС-спутник-ретранслятор» через одну и ту же область ОРГ с ограниченным размером занимаемого пространства, в качестве условия прохождения разных трасс «ЗС-спутник-ретранслятор» через область ОРГ с такими характеристиками принимают территориальную близость ЗС, определяют привязкой к географическим координатам выявленной опорной ЗС район наиболее вероятного местоположения искомой ЗС, осуществляют окончательный поиск и локализацию искомой ЗС относительно выявленной опорной ЗС в радиусе горизонтальной протяженности проекции локальной однородной области ОРГ на Землю.
Недостатком способа является ограничение функциональности на территории с низкой плотностью размещения ЗС.
При большом удалении ЗС друг от друга (от 10 километров) расстояние между точками пересечения трасс сигналов «ЗС-СР» с плоскостью горизонтального сечения ограниченной в пространстве однородной области ОРГ превышает линейные размеры как самой области ОРГ так и ее проекции на поверхность Земли, при этом среди опорных ЗС с известными географическими координатами, работающих одновременно с искомой ЗС через один и тот же CP, нет таких, которые могли бы находиться в пределах проекции области ОРГ на поверхность Земли совместно с искомой ЗС, иметь трассы сигналов «ЗС-СР», проходящие совместно с трассой сигнала искомой ЗС через одну и ту же ограниченную в пространстве область ОРГ, и совпадать с искомой ЗС по ряду параметров динамики уровней ретранслируемых сигналов (начало, продолжительность и количество интервалов снижения уровня) благодаря одинаковым закономерностям ослабления сигналов на трассах «ЗС-СР», проходящих через одну и ту же ограниченную в пространстве область ОРГ, принимаемых СРК, в результате чего не выполняются условия координатной привязки искомой ЗС путем фиксации ее положения с точностью до размеров области ОРГ над поверхностью Земли, в пределах которой находится опорная ЗС, имеющая сходство с искомой ЗС по параметрам динамики уровней ретранслируемых сигналов.
Технический результат: упрощение реализации способа с устранением ограничения функциональности на территории с низкой плотностью размещения ЗС.
Технический результат в способе определения местоположения земной станции спутниковой связи достигается за счет одновременного приема и измерения в двух разнесенных по координатам точках уровней ретранслируемого сигнала искомой ЗС и сигнала радиомаяка CP, через который ретранслируется сигнал искомой ЗС, и определении местоположения ЗС на основе обработки полученных измерений, при этом уровни ретранслируемого сигнала искомой ЗС, принимаемого стационарной станцией спутникового радиоконтроля (далее по тексту СССРК), регистрируют одновременно с уровнями сигнала радиомаяка CP, принимаемого в q-й позиции, где q=1, 2, …, Q - нумерация позиций маршрута мобильной станции спутникового радиоконтроля (далее по тексту МССРК), в виде последовательностей дискретных отсчетов уровней сигнала искомой ЗС yq(n) и сигнала радиомаяка xq(n), где n=1, 2, …, N - нумерация дискретных отсчетов с шагом Δt при Δt=const, последовательности дискретных отсчетов yq(n) и xq(n) записывают в текстовые файлы, которые обрабатывают в среде MathLab программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка 1, в результате обработки для q-й позиции маршрута МССРК на d-м уровне декомпозиции, где d=1, 2, …, D - нумерация уровней декомпозиции, D≤log2N - максимальный уровень декомпозиции, получают группу детализирующих вейвлет-коэффициентов Yq,d,h для последовательности yq(n) и группу детализирующих вейвлет-коэффициентов Xq,d,h для последовательности xq(n), где h=1, 2, …, m - нумерация вейвлет-коэффициентов, m=N/2(d-1), сохраняющих или изменяющих свои значения на стыках интервалов декомпозиции, вследствие динамики уровней сигналов искомой ЗС и радиомаяка CP, обусловленной прохождением их трасс через области ОРГ, учитывают, что сходство динамики уровней этих сигналов обеспечивается в том случае, когда трасса сигнала искомой ЗС по линии «Земля-Космос» и трасса сигнала радиомаяка CP по линии «Космос-Земля» проходят через одну и ту же область ОРГ, в качестве признака сходства динамики последовательностей дискретных отсчетов yq(n) и xq(n) рассматривают увеличение, снижение или сохранение неизменными значений вейвлет-коэффициентов Yq,d,h и Xq,d,h с одинаковыми индексами h, для оценки сходства сравнивают соседние вейвлет-коэффициенты в группах, полученных при декомпозиции последовательностей дискретных отсчетов yq(n) и xq(n), по результатам сравнения формируют два одномерных массива, включающих Aq с элементами Aq(k)=1, если Yq,d,k<Yq,d,k+1, Aq(k)=-1, если Yq,d,k>Yq,d,k+1, Aq(k)=0, если Yq,d,k=Yq,d,k+1, и Bq с элементами Bq(k)=1, если Хq,d,k<Хq,d,k+1, Bq(k)=-1, если Xq,d,k>Xq,d,k+1, Bq(k)=0, если Хq,d,k=Хq,d,k+1, где k=1, 2, …, m-1, выполняют попарное сравнение элементов массивов Aq и Bq с одинаковыми индексами к, в случае совпадения этих элементов вырабатывают признак 1, случае несовпадения - признак 0, на основе суммирования результатов промежуточных сравнений определяют количество совпадений fq, сходство динамики последовательностей дискретных отсчетов yq(n) и xq(n) при q-й позиции МССРК оценивают по удельному весу количества совпадений ξq=fq/(m-1), полагают, что оно обеспечивается при условии ξq≥0.75, с учетом того, что для выполнения этого условия необходимо прохождение трасс сигнала радиомаяка CP по линии «Космос-Земля» и сигнала искомой ЗС по линии «Земля-Космос» через одну и ту же ограниченную в пространстве область ОРГ, а также того, что для данных трасс такие траектории возможны в случае размещения в пределах проекции области ОРГ на поверхность Земли как искомой ЗС, так и q-й позиции МССРК, местоположение искомой ЗС определяют путем координатной привязки к q-й позиции МССРК с точностью до размеров области ОРГ над поверхностью Земли, в пределах которой находится эта позиция, причем, если при q-й позиции МССРК ξq<0.75, то выбирают другую позицию, где ξq≥0.75, выбор позиций МССРК осуществляют с привязкой к ближайшим узлам виртуальной сетки с шагом 7…10 км по каждой оси, нанесенной поверх района поиска.
В отличие от аналогов в заявляемом изобретении при определении местоположения ЗС-объекта поиска одновременно используют СССРК и МССРК, при этом антенны СССРК и МССРК наводят на CP, через который ретранслируется сигнал искомой ЗС. К антенно-фидерному тракту СССРК подключают измерительный приемник для измерения среднеквадратичных значений мощности (уровней) ретранслируемого сигнала ЗС-объекта поиска, а к антенно-фидерному тракту МССРК подключают измерительный приемник для измерения среднеквадратичных значений мощности (уровней) сигнала радиомаяка СР. Измерения выполняют одновременно в моменты времени с шагом Δt при Δt=const. Результаты измерений регистрируют в виде последовательностей дискретных отсчетов уровней сигнала искомой ЗС yq(n) и сигнала радиомаяка xq(n), где q=1, 2, …, Q - нумерация позиций маршрута МССРК, n=1, 2, …, N - нумерация дискретных отсчетов. Последовательности дискретных отсчетов записывают в текстовые файлы и обрабатывают в среде MathLab программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка.
В аналоге измеряют доплеровский сдвиг несущей частоты сигнала для всей трассы "ЗС-СР-приемная ЗС". Это требует внешнего высокостабильного опорного генератора и знания точного времени, что делает реализацию известных способов более сложной по сравнению с заявляемым изобретением, в котором измеряют уровни сигналов.
В отличие от аналога, заявляемое изобретение обеспечивает координатную привязку искомой ЗС вне зависимости от плотности размещения ЗС на территории, это достигается благодаря тому, что в нем для этой цели вместо позиции опорной ЗС, имеющей сходство с искомой ЗС по параметрам динамики уровней ретранслируемых сигналов, используется одна из позиций МССРК на маршруте ее перемещения, особенность которой состоит в том, что при централизованной обработке измерений, выполненных одновременно МССРК на данной позиции и СССРК, обнаруживается сходство параметров динамики уровней сигнала радиомаяка CP, принимаемого МССРК, и ретранслируемого сигнала искомой ЗС, принимаемого СССРК, причем, так как условиями сходства такого рода являются распространение через одну и ту же ограниченную в пространстве область ОРГ сигнала радиомаяка CP на линии «Космос-Земля» и сигнала искомой ЗС на линии «Земля-Космос», а также размещение МССРК и искомой ЗС в пределах проекции этой области ОРГ на поверхность Земли, то координатная привязка искомой ЗС обеспечивается на основе фиксации ее положения с точностью до размеров области ОРГ над поверхностью Земли, в пределах которой находится МССРК, антенна которой принимает сигнал радиомаяка CP-ретранслятора сигнала искомой ЗС, имеющий сходство по параметрам динамики уровней с ретранслируемым сигналом искомой ЗС, принимаемым антенной СССРК.
В аналоге местоположение ЗС определяют разностно-дальномерным методом, что требует точных данных об эфемеридах CP в конечных точках пеленгационных баз. Это влечет за собой дополнительные затраты на решение целого ряда технических задач и усложняет известные способы по сравнению с заявляемым изобретением, в котором такие данные не используются.
В аналоге при реализации разностно-дальномерного метода возникает неоднозначность определения местоположения ЗС. Для ее устранения дополнительно требуется специальная многостанционная наземная опорная система. В заявляемом изобретении используют другой подход к определению местоположения ЗС и необходимость создания такой системы отсутствует.
В отличие от аналогов в заявляемом изобретении оценивают сходство динамики последовательностей дискретных отсчетов ретранслируемого сигнала искомой ЗС, принимаемого СССРК, и сигнала радиомаяка CP, через который ретранслируется сигнал искомой ЗС, принимаемого в q-й позиции МССРК. Для этого текстовые файлы, содержащие записи последовательностей дискретных отсчетов уровней сигнала искомой ЗС yq(n) и сигнала радиомаяка xq(n), обрабатывают в среде MathLab программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка 1. При q-й позиции маршрута МССРК на d-м уровне декомпозиции, где d=1, 2, …, D - нумерация уровней декомпозиции, D≤log2N - максимальный уровень декомпозиции, получают группу детализирующих вейвлет-коэффициентов Yq,d,h для последовательности yq(n) и группу детализирующих вейвлет-коэффициентов Хq,d,h для последовательности xq(n), где h=1, 2, …, m - нумерация вейвлет-коэффициентов, m=N/2(d-1). Сравнивают соседние вейвлет-коэффициенты полученных групп. По результатам сравнения формируют два одномерных массива: Aq с элементами Aq(k)=1, если Yq,d,k<Yq,d,k+1, Aq(k)=-1, если Yq,d,k>Yq,d,k+1, Aq(k)=0, если Yq,d,k=Yq,d,k+1, и Bq с элементами Bq(k)=1, если Хq,d,k<Хq,d,k+1, Bq(k)=-1, если Xq,d,k>Xq,d,k+1, Bq(k)=0, если Xq,d,k=Xq,d,k+1, где k=1, 2, …, m-1. Далее, сравнивают попарно элементы массивов Aq и Bq с одинаковыми индексами k. При этом, если Aq(k)=Bq(k), то вырабатывают признак 1, в противном случае - признак 0. На основе суммирования промежуточных сравнений определяют количество совпадений fq. Сходство динамики последовательностей дискретных отсчетов yq(n) и xq(n) при q-й позиции МССРК оценивают по удельному весу количества совпадений ξq=fq/(m-1). Полагают, что оно обеспечивается при ξq≥0.75. Причиной сходства считают прохождение через одну и ту же область ОРГ с ограниченным размером занимаемого пространства трасс сигнала искомой ЗС по линии «Земля-Космос», принимаемого СССРК и сигнала радиомаяка CP по линии «Космос-Земля», принимаемого МССРК. Учитывают, что условием прохождения этих трасс через одну и ту же область ОРГ является территориальная близость искомой ЗС и q-й позиции МССРК. Район наиболее вероятного местоположения искомой ЗС определяют привязкой к географическим координатам q-й позиции МССРК. Далее, осуществляют окончательный поиск и локализацию искомой ЗС относительно выявленной позиции МССРК в радиусе горизонтальной протяженности проекции локальной однородной области ОРГ на Землю.
Заявляемый способ обладает новизной в сравнении с известными способами, отличается от них существенными признаками, так как включает одновременный прием и измерение в двух разнесенных по координатам точках уровней ретранслируемого сигнала искомой ЗС и сигнала радиомаяка CP, через который ретранслируется сигнал искомой ЗС, и определение местоположения ЗС на основе обработки полученных измерений, при этом уровни ретранслируемого сигнала искомой ЗС, принимаемого СССРК, регистрируют одновременно с уровнями сигнала радиомаяка CP, принимаемого в q-й позиции, где q=1, 2, …, Q - нумерация позиций маршрута МССРК, в виде последовательностей дискретных отсчетов уровней сигнала искомой ЗС yq(n) и сигнала радиомаяка xq(n), где n=1, 2, …, N - нумерация дискретных отсчетов с шагом Δt при Δt=const, последовательности дискретных отсчетов yq(n) и xq(n) записывают в текстовые файлы, которые обрабатывают в среде MathLab программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка 1, в результате обработки для q-й позиции маршрута МССРК на d-м уровне декомпозиции, где d=1, 2, …, D - нумерация уровней декомпозиции, D≤log2N - максимальный уровень декомпозиции, получают группу детализирующих вейвлет-коэффициентов Yq,d,h для последовательности yq(n) и группу детализирующих вейвлет-коэффициентов Xq,d,h для последовательности xq(n), где h=1, 2, …, m - нумерация вейвлет-коэффициентов, m=N/2(d-1), сохраняющих или изменяющих свои значения на стыках интервалов декомпозиции, вследствие динамики уровней сигналов искомой ЗС и радиомаяка CP, обусловленной прохождением их трасс через области ОРГ, учитывают, что сходство динамики уровней этих сигналов обеспечивается в том случае, когда трасса сигнала искомой ЗС по линии «Земля-Космос» и трасса сигнала радиомаяка CP по линии «Космос-Земля» проходят через одну и ту же область ОРГ, в качестве признака сходства динамики последовательностей дискретных отсчетов yq(n) и xq(n) рассматривают увеличение, снижение или сохранение неизменными значений вейвлет-коэффициентов Yq,d,h и Xq,d,h с одинаковыми индексами h, для оценки сходства сравнивают соседние вейвлет-коэффициенты в группах, полученных при декомпозиции последовательностей дискретных отсчетов yq(n) и xq(n), по результатам сравнения формируют два одномерных массива, включающих Aq с элементами Aq(k)=1, если Yq,d,k<Yq,d,k+1, Aq(k)=-1, если Yq,d,k>Yq,d,k+1, Aq(k)=0, если Yq,d,k=Yq,d,k+1, и Bq с элементами Bq(k)=1, если Хq,d,k<Хq,d,k+1, Bq(k)=-1, если Хq,d,k>Хq,d,k+1, Bq(k)=0, если Хq,d,k=Хq,d,k+1, где k=1, 2, …, m-1, выполняют попарное сравнение элементов массивов Aq и Bq с одинаковыми индексами к, в случае совпадения этих элементов вырабатывают признак 1, случае несовпадения - признак 0, на основе суммирования результатов промежуточных сравнений определяют количество совпадений fq, сходство динамики последовательностей дискретных отсчетов yq(n) и xq(n) при q-й позиции МССРК оценивают по удельному весу количества совпадений ξq=fq/(m-1), полагают, что оно обеспечивается при условии ξq≥0.75, с учетом того, что для выполнения этого условия необходимо прохождение трасс сигнала радиомаяка CP по линии «Космос-Земля» и сигнала искомой ЗС по линии «Земля-Космос» через одну и ту же ограниченную в пространстве область ОРГ, а также того, что для данных трасс такие траектории возможны в случае размещения в пределах проекции области ОРГ на поверхность Земли как искомой ЗС, так и q-й позиции МССРК, местоположение искомой ЗС определяют путем координатной привязки к q-й позиции МССРК с точностью до размеров области ОРГ над поверхностью Земли, в пределах которой находится эта позиция, причем, если при q-й позиции МССРК ξq<0.75, то выбирают другую позицию, где ξq≥0.75, выбор позиций МССРК осуществляют с привязкой к ближайшим узлам виртуальной сетки с шагом 7…10 км по каждой оси, нанесенной поверх района поиска.
Кроме этого заявляемый способ обладает новизной в сравнении с известными способами, отличаясь от них такими существенными признаками, как учет закономерностей в динамике последовательностей дискретных отсчетов ретранслируемого сигнала искомой ЗС и сигнала радиомаяка CP, через который ретранслируется сигнал искомой ЗС, и использование для определения местоположения ЗС сходства этих закономерностей при прохождении трасс сигнала искомой ЗС по линии «Земля-Космос» и сигнала радиомаяка CP по линии «Космос-Земля» через область ОРГ, а также обеспечение координатной привязки искомой ЗС вне зависимости от территориальной плотности размещения ЗС, благодаря тому, что в нем для этой цели используют позицию МССРК, в которой обеспечивается сходство последовательности дискретных отсчетов сигнала радиомаяка CP, принимаемого МССРК, и ретранслируемого сигнала искомой ЗС, принимаемого СССРК. Все это приводит к упрощению приемов определения местоположения ЗС.
Наличие отличительных от прототипа существенных признаков позволяет признать заявляемое техническое решение новым.
Из уровня техники не выявлены технические решения, содержащие признаки, совпадающие с отличительными признаками заявляемого способа, поэтому заявляемый способ отвечает критерию изобретательского уровня.
Возможность осуществления заявляемого изобретения в промышленности позволяет признать его соответствующим критерию промышленной применимости.
Сущность способа и возможность его реализации поясняются фигурами 1, 2, 3, где
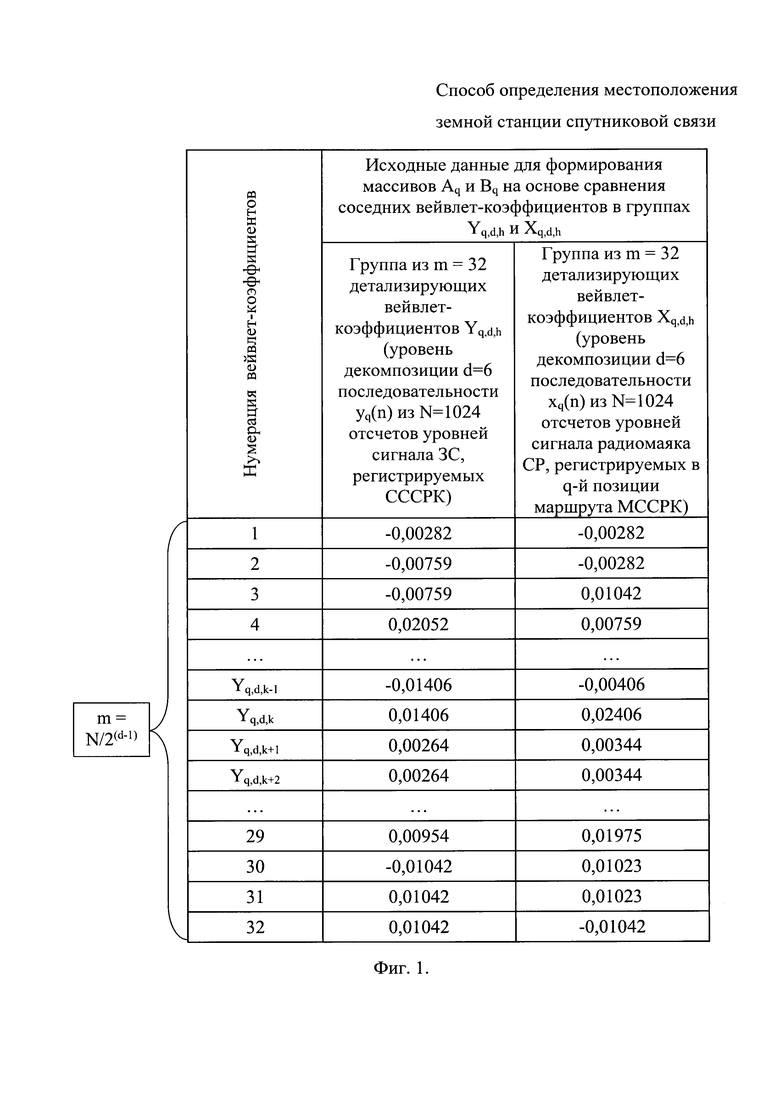
на фиг. 1 показаны массивы, содержащие две группы детализирующих вейвлет-коэффициентов на уровне декомпозиции d=6 дискретных последовательностей отсчетов уровней сигналов искомой ЗС (группа Yq,d,h) и радиомаяка CP в q-й позиции маршрута МССРК (группа Хq,d,h);
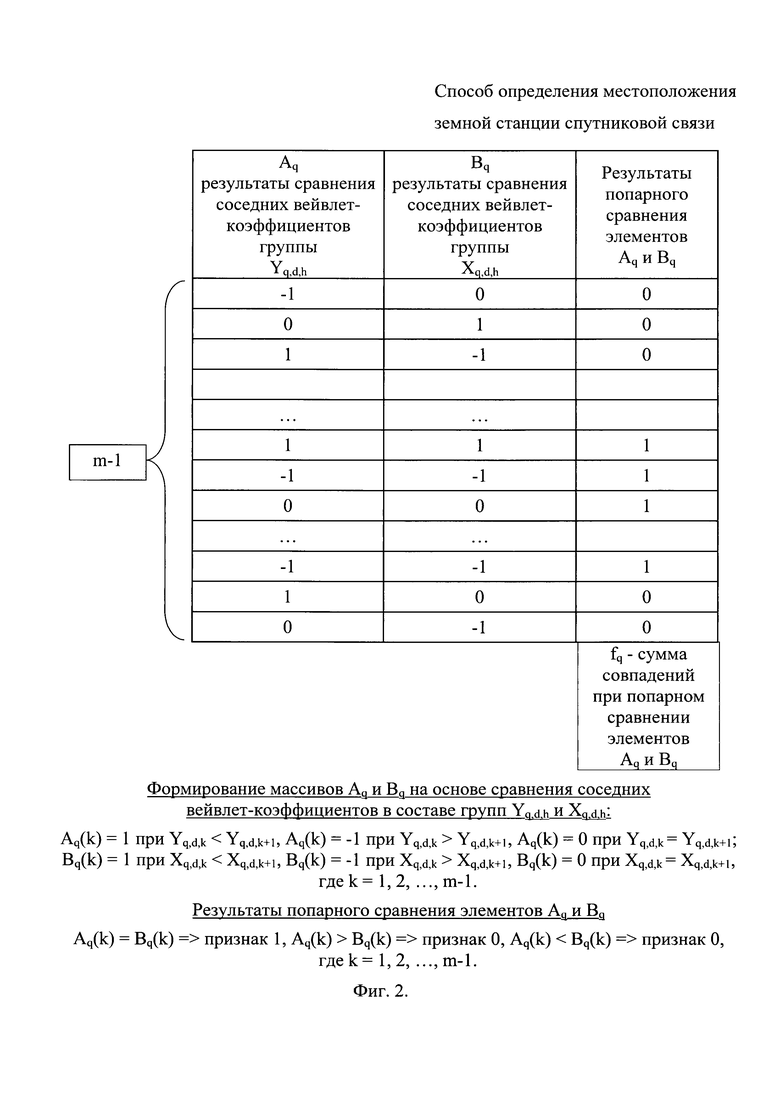
на фиг. 2 показаны массивы Aq и Bq, содержащие результаты сравнения соседних вейвлет-коэффициентов групп Yq,d,h и Xq,d,h, результаты попарного сравнения элементов Aq и Bq, определяющие количество совпадений fq;
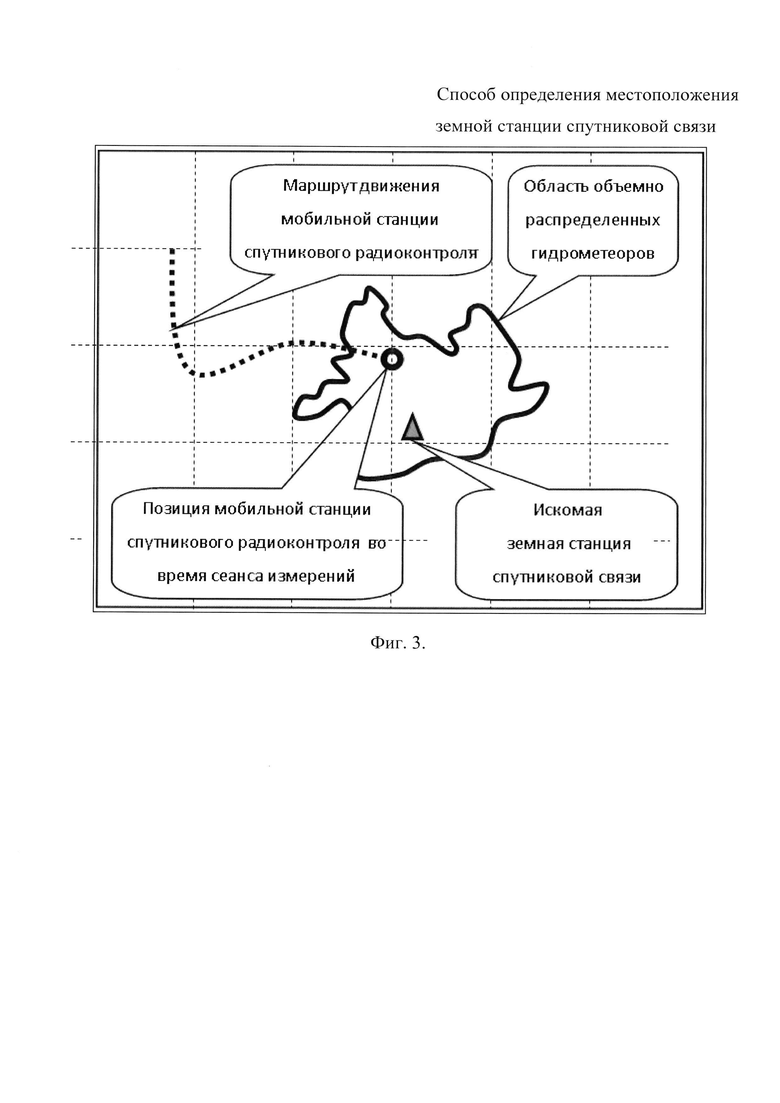
на фиг. 3 приведена схема геометрического представления реализации способа Заявляемый способ заключается в следующем.
МССРК перемещают в районе поиска ЗС по заданному маршруту. СССРК занимает фиксированную позицию. Сеансы измерений производят во время остановок МССРК. Остановки МССРК выполняют в точках с привязкой к ближайшим узлам виртуальной сетки с шагом 7…10 км по каждой оси, нанесенной поверх района поиска. В сеансе измерений одновременно используют СССРК и МССРК. Обмен данными между СССРК и МССРК поддерживают в реальном масштабе времени с помощью линии модемной связи. Перед сеансом измерений антенны СССРК и МССРК наводят на CP, через который ретранслируется сигнал искомой ЗС. К антенно-фидерному тракту СССРК подключают измерительный приемник, с помощью которого измеряют среднеквадратичные значения мощности (уровни) ретранслируемого сигнала искомой ЗС. К антенно-фидерному тракту МССРК подключают измерительный приемник, с помощью которого измеряют среднеквадратичные значения мощности (уровни) сигнала радиомаяка СР. Начало отсчета сеансов измерений синхронизируют по временным меткам с приемников сигналов спутниковой радионавигационной системы в составе СССРК и МССРК. Среднеквадратичные значения уровней мощности сигналов регистрируют в эквидистантные моменты времени. Результаты измерений регистрируют в виде последовательностей дискретных отсчетов уровней сигнала искомой ЗС yq(n) и сигнала радиомаяка xq(n) и записывают в текстовые файлы. В результате обработки текстовых файлов программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка 1 в среде MathLab на базе ПЭВМ в составе автоматизированного рабочего места оператора СССРК получают информацию о динамических особенностях сигналов на d-м уровне декомпозиции, где d=1, 2, …, D - нумерация уровней декомпозиции, D≤log2N - максимальный уровень декомпозиции, в виде группы детализирующих вейвлет-коэффициентов Yq,d,h для последовательности yq(n) и группу детализирующих вейвлет-коэффициентов Хq,d,h для последовательности xq(n), где h=1, 2, …, m - нумерация вейвлет-коэффициентов, m=N/2(d-l) (фиг. 1). На основе сравнения в каждой группе соседних вейвлет-коэффициентов формируют два одномерных массива: Aq с элементами Aq(k)=1, если Yq,d,k<Yq,d,k+1, Aq(k)=-1, если Yq,d,k>Yq,d,k+1, Aq(k)=0, если Yq,d,k=Yq,d,k+1, и Bq с элементами Bq(k)=1, если Xq,d,k<Xq,d,k+1, Bq(k)=-1, если Xq,d,k>Xq,d,k+1, Bq(k)=0, если Xq,d,k=Xq,d,k+1, где k=1, 2, …, m-1 (фиг. 2). Сравнивают элементы массивов Aq и Bq с одинаковыми индексами k. При совпадении элементов вырабатывают признак 1, в противном случае - признак 0. Далее, путем суммирования промежуточных сравнений определяют количество совпадений fq, с помощью которого определяют удельный вес количества совпадений ξq=fq/(m-1), используемый как показатель сходства динамики сигналов. Полагают, что сходство динамики последовательностей дискретных отсчетов yq(n) и xq(n) в q-й позиции МССРК обеспечивается при ξq≥0.75. Исходя из геометрического представления способа (фиг. 3), где показаны локальная однородная область ОРГ (горизонтальная протяженность 5-10 км), центральная перспективная проекция этой области на поверхность Земли (соизмерима с горизонтальной протяженностью области ОРГ), трассы сигнала радиомаяка CP по линии «Космос-Земля» и сигнала искомой ЗС по линии «Земля-Космос», полагают, что сходство динамики последовательностей дискретных отсчетов yq(n) и xq(n) для q-й позиции МССРК обусловлено прохождением трасс указанных сигналов через одну и ту же ограниченную в пространстве область ОРГ, что возможно при размещении как искомой ЗС, так и q-й позиции МССРК в пределах проекции области ОРГ на поверхность Земли. Определяют привязкой к географическим координатам q-й позиции МССРК, где обнаружено сходство динамики последовательностей yq(n) и xq(n), район наиболее вероятного местоположения искомой ЗС. Поиск и локализацию искомого объекта осуществляют относительно выявленной q-й позиции МССРК в пределах радиуса, соизмеримого с величиной горизонтальной протяженности проекции области ОРГ на Землю (точность определения местоположения ограничивается величиной горизонтальной протяженности этой проекции порядка 10 км).
Способ распространяется на прием сигналов СССРК в условиях «ясное небо», при работе искомой ЗС без перестройки частоты настройки и с постоянной излучаемой мощностью.
Пример осуществления заявляемого способа
Способ определения местоположения земной станции спутниковой связи осуществляется следующим образом. В районе поиска ЗС выбирают позицию МССРК с привязкой к ближайшему узлу виртуальной сетки с шагом 7…10 км по каждой оси, нанесенной поверх района поиска. В измерениях одновременно участвуют СССРК и МССРК. Начало отсчета интервалов измерений синхронизируют по временным меткам с приемников сигналов спутниковой радионавигационной системы в составе СССРК и МССРК. Обмен данными между СССРК и МССРК поддерживают в реальном масштабе времени с помощью линии модемной связи. Антенны СССРК и МССРК перед сеансом измерений наводят на CP, через который ретранслируется сигнал искомой ЗС. СССРК принимает ретранслируемый сигнал искомой ЗС, а МССРК - сигнал радиомаяка СР. Для измерения уровней сигналов используют измерительные приемники, которые подключают к антенно-фидерным трактам СССРК и МССРК. Временной интервал измерений выбирают исходя из условия регистрации N=1024 отсчетов с шагом Δt=1 сек (порядка 20 мин). Дискретные последовательности отсчетов уровней сигналов, полученные в результате измерений, записывают в текстовые файлы и обрабатывают в среде MathLab на базе ПЭВМ в составе автоматизированного рабочего места оператора СССРК. Декомпозицию реализаций сигналов проводят на уровне d=6. Для каждого текстового файла-записи измерений получают группу из m=32 детализирующих вейвлет-коэффициентов. На основе сравнения соседних вейвлет-коэффициентов, входящих в эти группы, формируют одномерные массивы: Aq с элементами Aq(k)=1, если Yq,d,k<Yq,d,k+1, Aq(k)=-1, если Yq,d,k>Yq,d,k+1, Aq(k)=0, если Yq,d,k=Yq,d,k+1, и Bq с элементами Bq(k)=1, если Xq,d,k<Xq,d,k+1, Bq(k)=-1, если Xq,d,k>Xq,d,k+1, Bq(k)=0, если Xq,d,k=Xq,d,k+1, где k=1, 2, …, m-1. Элементы массивов Aq и Bq с одинаковыми индексами к сравнивают попарно и вырабатывают: признак 1 - в случае совпадения элементов и признак 0 - в случае несовпадения. Результаты сравнений элементов массивов Aq и Bq с одинаковыми индексами к суммируют и определяют количество совпадений fq. Удельный вес количества совпадений ξq=fq/(m-1) используют как показатель сходства динамики уровней сигналов. Если оказывается, что ξq≥0.75, то полагают, что при размещении МССРК в q-й позиции обеспечивается сходство динамики реализаций анализируемых сигналов. В этом случае с удаленного сервера базы данных карт облачности получают фактографические данные об области ОРГ, в пределах которой находится позиция МССРК, которые выводят на монитор СССРК (фиг. 3), где показана карта облачности. Местоположение искомой ЗС определяют с точностью до размеров области ОРГ над поверхностью Земли, в пределах которой находится позиция МССРК, в которой выявлено сходство сравниваемых ретранслируемого сигнала искомой ЗС и сигнала радиомаяка СР.
Технико-экономических эффект
Использование заявляемого способа позволит упростить определение местоположения ЗС с устранением ограничения функциональности на территории с низкой плотностью размещения ЗС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ | 2010 |
|
RU2442996C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2653866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ СПУТНИКА-РЕТРАНСЛЯТОРА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2679890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2684740C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
| ОБМОТКА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА | 2015 |
|
RU2580673C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
Изобретение относится к области спутникового радиоконтроля и может быть использовано при поиске и локализации позиций земных станций (ЗС) спутниковой связи - источников помех стволам с прямой ретрансляцией спутников-ретрансляторов (СР) на геостационарной орбите. Достигаемый технический результат - упрощение реализации способа и устранение ограничения функциональности на территории с низкой плотностью размещения ЗС. Указанный результат достигается за счет того, что одновременно регистрируют последовательности дискретных отсчетов уровней ретранслируемого сигнала искомой ЗС, принимаемого стационарной станцией спутникового радиоконтроля и сигнала радиомаяка СР, через который ретранслируется сигнал искомой ЗС, принимаемого мобильной станцией спутникового радиоконтроля. В результате обработки принятых последовательностей программными средствами получают группы детализирующих вейвлет-коэффициентов, которые сохраняют или изменяют свои значения вследствие динамики уровней сигналов искомой ЗС и сигнала радиомаяка CP, обусловленной прохождением их трасс через области объемно распределенных гидрометеоров. В качестве признака сходства динамики принятых последовательностей рассматривают увеличение, снижение или сохранение неизменными значений вейвлет-коэффициентов с одинаковыми индексами. Для оценки сходства динамики принятых последовательностей по результатам сравнения соседних вейвлет-коэффициенты в группах коэффициентов формируют одномерные массивы Aq и Bq, где q – 1, 2 …Q – нумерация позиций. В случае совпадения элементов массивов Aq и Bq с одинаковыми индексами вырабатывают признак 1, в случае несовпадения - признак 0. Сходство динамики принятых последовательностей оценивают по удельному весу количества совпадений, полученных на основе суммирования результатов сравнений элементов массивов Aq и Bq с одинаковыми индексами. 3 ил.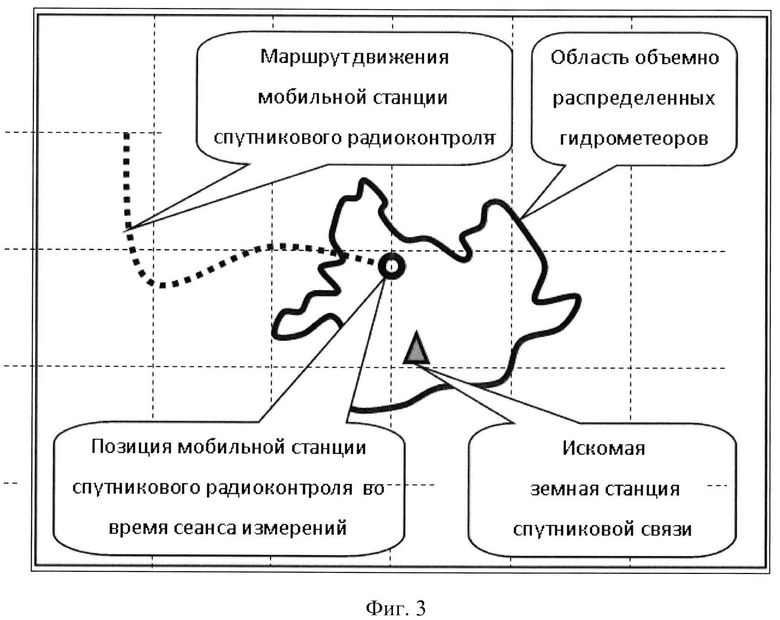
Способ определения местоположения земной станции спутниковой связи, отличающийся тем, что включает в себя одновременный прием и измерение в двух разнесенных по координатам точках уровней ретранслируемого сигнала искомой земной станции спутниковой связи и сигнала радиомаяка спутника-ретранслятора на геостационарной орбите, через который ретранслируется сигнал искомой земной станции спутниковой связи, и определении местоположения земной станции спутниковой связи на основе обработки полученных измерений, при этом уровни ретранслируемого сигнала искомой земной станции спутниковой связи, принимаемого стационарной станцией спутникового радиоконтроля, регистрируют одновременно с уровнями сигнала радиомаяка спутника-ретранслятора на геостационарной орбите, принимаемого в q-й позиции, где q=1, 2, …, Q - нумерация позиций маршрута мобильной станции спутникового радиоконтроля, в виде последовательностей дискретных отсчетов уровней сигнала искомой земной станции спутниковой связи yq(n) и сигнала радиомаяка xq(n), где n=1, 2, …, N - нумерация дискретных отсчетов с шагом Δt при Δt=const, последовательности дискретных отсчетов yq(n) и xq(n) записывают в текстовые файлы, которые обрабатывают в среде MathLab программными средствами дискретного вейвлет-преобразования на основе базового вейвлета Добеши порядка 1, в результате обработки для q-й позиции маршрута мобильной станциии спутникового радиоконтроля на d-м уровне декомпозиции, где d=1, 2, …, D - нумерация уровней декомпозиции, D≤log2N - максимальный уровень декомпозиции, получают группу детализирующих вейвлет-коэффициентов Yq,d,h для последовательности yq(n) и группу детализирующих вейвлет-коэффициентов Xq,d,h для последовательности xq(n), где h=1, 2, …, m - нумерация вейвлет-коэффициентов, m=N/2(d-1), сохраняющих или изменяющих свои значения на стыках интервалов декомпозиции, вследствие динамики уровней сигналов искомой земной станции спутниковой связи и радиомаяка спутника-ретранслятора, обусловленной прохождением их трасс через области объемно распределенных гидрометеоров, учитывают, что сходство динамики уровней этих сигналов обеспечивается в том случае, когда трасса сигнала искомой земной станции спутниковой связи по линии «Земля-Космос» и трасса сигнала радиомаяка спутника-ретранслятора по линии «Космос-Земля» проходят через одну и ту же область объемно распределенных гидрометеоров, в качестве признака сходства динамики последовательностей дискретных отсчетов yq(n) и xq(n) рассматривают увеличение, снижение или сохранение неизменными значений вейвлет-коэффициентов Yq,d,h и Xq,d,h с одинаковыми индексами h, для оценки сходства сравнивают соседние вейвлет-коэффициенты в группах, полученных при декомпозиции последовательностей дискретных отсчетов yq(n) и xq(n), по результатам сравнения формируют два одномерных массива, включающих Aq с элементами Aq(k)=1, если Yq,d,k<Yq,d,k+1, Aq(k)=-1, если Yq,d,k>Yq,d,k+1, Aq(k)=0, если Yq,d,k=Yq,d,k+1, и Bq с элементами Bq(k)=1, если Xq,d,k<Xq,d,k+1, Bq(k)=-1, если Xq,d,k>Xq,d,k+1, Bq(k)=0, если Xq,d,k=Xq,d,k+1, где k=1, 2, …, m-1, выполняют попарное сравнение элементов массивов Aq и Bq с одинаковыми индексами k, в случае совпадения этих элементов вырабатывают признак 1, в случае несовпадения - признак 0, на основе суммирования результатов промежуточных сравнений определяют количество совпадений fq, сходство динамики последовательностей дискретных отсчетов yq(n) и xq(n) при q-й позиции мобильной станции спутникового радиоконтроля оценивают по удельному весу количества совпадений ξq=fq/(m-1), полагают, что оно обеспечивается при условии ξq≥0,75, с учетом того, что для выполнения этого условия необходимо прохождение трасс сигнала радиомаяка спутника-ретранслятора по линии «Космос-Земля» и сигнала искомой земной станции спутниковой связи по линии «Земля-Космос» через одну и ту же ограниченную в пространстве область объемно распределенных гидрометеоров, а также того, что для данных трасс такие траектории возможны в случае размещения в пределах проекции области объемно распределенных гидрометеоров на поверхность Земли как искомой земной станции спутниковой связи, так и q-й позиции мобильной станции спутникового радиоконтроля, местоположение искомой земной станции спутниковой связи определяют путем координатной привязки к q-й позиции мобильной станции спутникового радиоконтроля с точностью до размеров области объемно распределенных гидрометеоров над поверхностью Земли, в пределах которой находится эта позиция, причем, если при q-й позиции мобильной станции спутникового радиоконтроля ξq<0,75, то выбирают другую позицию, где ξq≥0,75, выбор позиций мобильной станции спутникового радиоконтроля осуществляют с привязкой к ближайшим узлам виртуальной сетки с шагом 7…10 км по каждой оси, нанесенной поверх района поиска.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ | 2010 |
|
RU2442996C1 |
| Станок-автомат для маркировки изделий | 1956 |
|
SU104324A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| US 5008679 A, 16.04.1991 | |||
| EP 869373 A2, 07.10.1998 | |||
| JP 2002057720 A, 22.02.2002 | |||
| Приемное устройство вибрационного магнитометра | 1977 |
|
SU679901A1 |

