Изобретение относится к транспортному машиностроению, в частности, к рулевым механизмам со встроенным гидравлическим усилителем.
Наиболее близким техническим решением, выбранным в качестве прототипа, является рулевой механизм транспортного средства со встроенным усилителем, содержащий корпус, в котором соосно размещены поршень и винт, кинематически связанные шариковинтовой передачей, зубчатую рейку, выполненную на поршне, образующую реечную передачу с зубчатым сектором вала рулевой сошки (см. Каталог фирмы ZAHNRAO FABRIK ФРГ, 1985 г.).
Недостатком известного рулевого механизма является то, что он обладает недостаточной надежностью из-за наличия опрокидывающего момента на поршне, обусловленного тем, что начальная плоскость реечной передачи не совпадает с линией действия равнодействующей гидравлических сил, проходящей через центр давления, который расположен на оси поршня. Это приводит к повышенному износу как поршня, так и корпуса, что снижает коэффициент полезного действия (КПД) рулевого механизма.
В основу изобретения поставлена задача создать такой рулевой механизм транспортного средства со встроенным усилителем, в котором новое выполнение рабочего поршня и зубчатого сектора вала рулевой сошки, позволило бы обеспечить повышение надежности и КПД рулевого механизма.
Поставленная задача решается тем, что в рулевом механизме со встроенным усилителем, содержащем корпус, в котором соосно размещены поршень и винт, кинематически связанные шариковинтовой передачей, зубчатую рейку, выполненную на поршне, образующую реечную передачу с зубчатым сектором вала рулевой сошки, в зубьях реечной передачи выполнены пазы, в которых размещен винт, при этом оси поршня и винта лежат в начальной плоскости реечной передачи.
Поверхности, выполненных в зубьях рейки и зубчатого сектора пазов, эквидистантны поверхности винта.
Сопоставительный анализ с прототипом показывает, что заявляемой рулевой механизм транспортного средства отличается тем, что в зубьях реечной передачи выполнены пазы, в которых размещен винт, при этом оси поршня и винта лежат в начальной плоскости реечной передачи.
Поверхности, выполненных в зубьях рейки и зубчатого сектора пазов, эквидистанты поверхности винта.
Выполнение в зубьях реечной передачи пазов, в которых размещен винт и расположение осей поршня и винта в начальной плоскости реечной передачи позволяет:
исключить опрокидывающий момент на поршне за счет совпадения линии действия равнодействующей гидравлических сил, проходящей через центр давления поршня, который совпадает с осями поршня и винта, с начальной плоскостью реечной передачи, что приводит к значительному уменьшению износа корпуса и поршня;
повысить КПД рулевого механизма за счет снижения вредных сопротивлений (сил трения).
Выполнение поверхностей пазов в зубьях рейки и зубчатого сектора эквидистантных поверхности винта позволяет минимально уменьшить площадь контакта зубьев рейки и сектора, что обеспечивает низкие контактные напряжения в зацеплении.
Таким образом, технический результат, получаемый при осуществлении заявляемого изобретения, выражается в уменьшении износа поршня и корпуса, снижении сил трения, повышении КПД рулевого механизма.
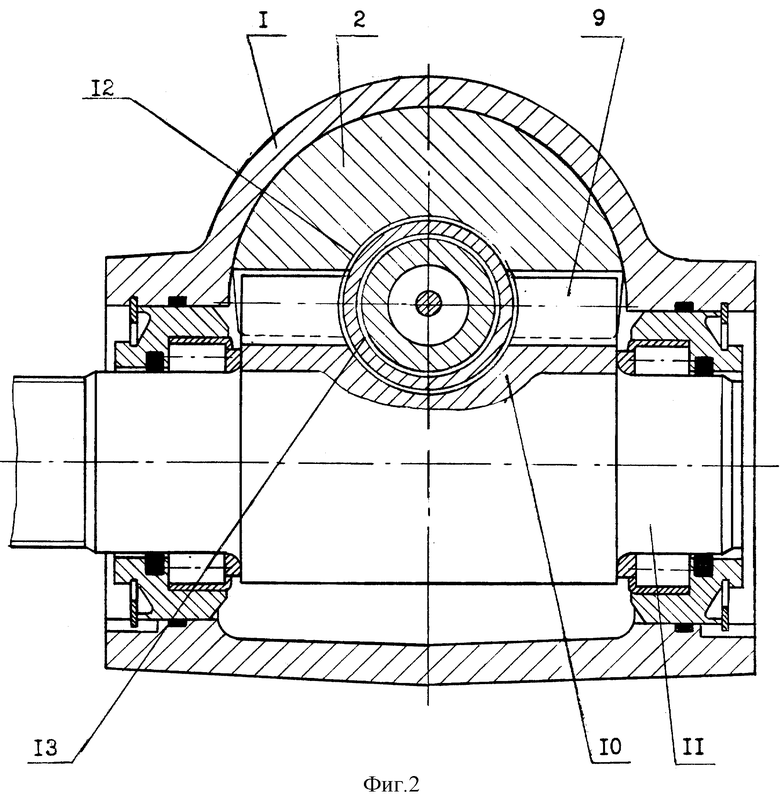
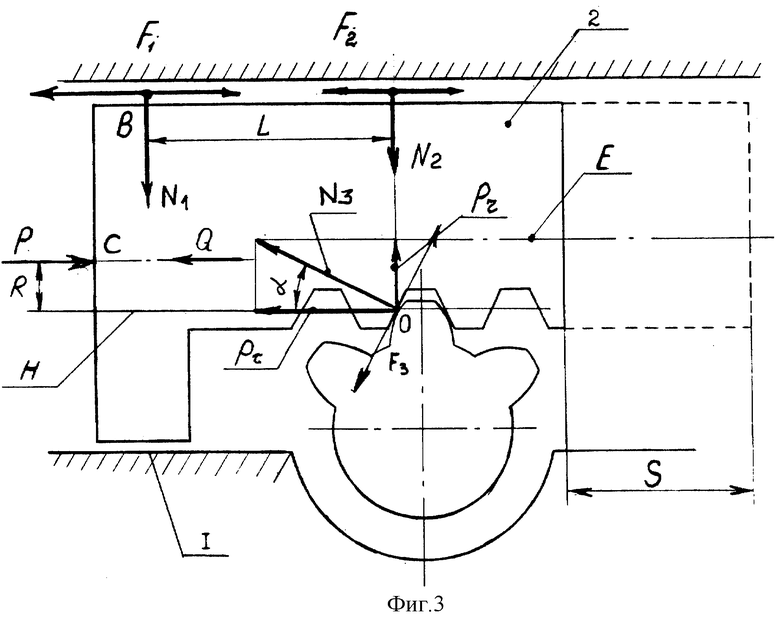
Сущность изобретения поясняется чертежами, где на фиг. 1 показан рулевой механизм, продольный разрез; на фиг. 2 - поперечный размер на фиг. 3 - схема нагружения поршня в известной конструкции (прототип).
Рулевой механизм со встроенным усилителем содержит корпус 1, разделенный поршнем 2 на две рабочие полости 3 и 4. В корпусе 1 соосно поршню 2 установлен с возможностью вращения и без осевого перемещения винт 5, соединенный с рулевым валом (на чертеже не показан) и кинематически связанный шариковинтовой передачей 6 с поршнем 2.
На поршне 2 выполнена зубчатая рейка 7, зубья 8 которой находятся в зацеплении с зубьями 9 зубчатого сектора 10, жестко связанным с валом 11 рулевой сошки.
В зубьях 8 зубчатой рейки 7 и зубья 9 зубчатого сектора 10 выполнены пазы 12 и 13 соответственно, в которых размещен винт и поверхности которых эквидистантны поверхности винта 5.
На чертеже 3 и в описании введены следующие обозначения:
B - точка поршня;
C - точка приложения равнодействующей гидравлических сил к поршню (центр давления);
E - ось поршня (винта);
H - начальная плоскость реечной передачи;
F1 - сила трения от перекоса поршня относительно корпуса;
F2 - сила трения при скольжении поршня относительно корпуса;
F3 - сила трения в реечной передаче;
L - расстояние от точки контакта рейки с зубчатым сектором до линии действия силы нормальной реакции опоры N1;
N1 - сила нормальной реакции опоры от перекоса поршня относительно корпуса;
N2 - сила нормальной реакции опоры при скольжении поршня относительно корпуса;
N3 - равнодействующая сила сопротивления в реечной передаче, она же сила нормальной реакции опоры;
O - точка контакта рейки с зубчатым сектором;
P - равнодействующая гидравлических сил, действующих на поршень;
Pr - радиальная сила в зацеплении;
Pτ - тангенциальная сила в зацеплении;
R - расстояние от центра давления до начальной плоскости реечной передачи;
Q - сила сопротивления (без учета сил трения);
S - величина хода поршня;
α = 25o - угол зацепления реечной передачи.
Рассмотрим схему нагружения поршня известной конструкции, выбранной в качестве прототипа (см. фиг. 3)
Сила трения покоя F равна:
F = μ N1 (I)
где μ - коэффициент трения покоя.
Сила трения скольжения Fc равна:
Fc = μcN, (2)
где μc - коэффициент трения скольжения.
Так как в рассматриваемом механизме скорость перемещения поршня относительно корпуса незначительна, то принимаем μ = μc (см. Кузьмичев В.Е. Законы и формулы физики. Киев, "Наукова думка", 1989, стр. 50-51).
В нашем случае внешней силой, под действием которой поршень 2 перемещается относительно корпуса 1, является гидравлическое давление жидкости на поршень 2. Так как жидкость в полости 3 и 4 корпуса 1 подается под давлением, то точка приложения равнодействущей P гидравлических сил (центр давления C), совпадает с осью E поршня 2.
Значит, в общем случае
P > μ N (3)
В точке O на поршень 2 действует опрокидывающий момент M, равный
M = P•R (4)
Запишем условие равновесия поршня 2 относительно точки O:
∑ M(O)=0; PR + N1L = 0 (5)
При работе рулевого механизма в нем возникают вредные сопротивления от сил трения, обусловленные наличием опрокидывающего момента - сила F1;
скольжением поршня 2 относительно корпуса 1 - сила F2;
наличием зубчатого зацепления - сила F3.
Эти вредные сопротивления ведут к снижению КПД механизма и повышают износ трущихся поверхностей корпуса 1 и поршня 2.
Проанализируем формулу (5).
Параметр P является расчетным и изменению не подлежит. Длина поршня 2 также является расчетной и изменению не подлежит.
Уменьшить вредное сопротивление путем уменьшения сил трения F2 и F3 не представляется возможным.
Уменьшение силы F1 можно добиться уменьшением расстояния R. В случае, когда R = 0, т.е. центр давления C, а значит и оси поршня 2 и винта 5 лежат в начальной плоскости H реечной передачи, опрокидывающий момент равен нулю, то F1 тоже равна нулю, что позволяет уменьшить вредные сопротивления.
КПД механизма определяется по формуле:
где η - КПД механизма;
Aп - полезная работа;
Aз - затраченная работа;
Aв - работа вредных сопротивлений.
(см. М.С. Мовнин и др. Основы технической механики. Ленинград, "Машиностроение", 1990, стр. 157).
Величина работы определяется по формуле:
A = F•S (7)
где A - затраченная работа;
F - сила, действующая на тело;
S - перемещение, совершаемое телом.
(см. В. А. Лободюк и др. Справочник по элементарной физике. Киев, "Наукова думка", 1978, стр. 80).
Как указывалось выше, вредные силы сопротивления обусловлены силами трения F1, F2 и F3.
В данном случае, с учетом формулы (I), силы трения равны:
F1 = μ N1 (8)
F2 = μ N2 (9)
F3 = μ N3 (10)
С учетом формулы
Сила N2 является реакцией опоры, от радиальной силы, действующей в зацеплении.
N2 = Pr = P•tg α (12)
Тогда
F2 = μPtgα (13)
Сила N3 расположена вдоль линии зацепления реечной передачи и является равнодействующей сил Rr и Pτ , поэтому:
С учетом выражения (14) имеем:
Работа сил трения (вредных сил сопротивления) равна:
Работа сил трения (вредных сил сопротивления) равна:
Aв = (F1 + F2 + F3)•S (16)
или, с учетом формул (11), (13) и (15)
Тогда затраченная работа Aз равна:
или
Подставляем значения Aв и Aз в формулу (6) для определения КПД:
После упрощений получаем:
Данная формула позволяет определить КПД с учетом всех вредных сил сопротивления.
При совпадении центра давления C с начальной плоскостью H реечной передачи, т.е. при R = 0, что имеет место в заявляемом рулевом механизме, формула (21) примет вид:
Из выражения (22) видно, что в рулевом механизме, в котором отсутствует опрокидывающий момент, т.е. R = 0, КПД механизма изменится.
Для сравнительной оценки значений КПД у рулевого механизма с наличием опрокидывающего момента и без него примем ряд допущений.
1. КПД рулевого механизма без опрокидывающего момента на поршне определяется из выражения
η1 = ηп•ηц (23)
где  КПД реечной передачи;
КПД реечной передачи;
ηп = 0,96 (см. Решетов Д.Н. Детали машин. М.: "Машиностроение", 1989, стр. 199);
ηц - КПД гидроцилиндра;
ηц = 0,93 (см. Станочные приспособления. Справочники. Том 1. Под редакцией Б.Н. Вардашкина и др., М.: "Машиностроение", 1984, стр. 471).
Таким образом:
η1 = 0,96•0,93 = 0,893 (24)
Подставив значение η1 в формулу (22) определим среднее значение коэффициента трения μ рулевого механизма
2. Примем следующие значения параметров в выражениях (21) и (22):
R = 1,0
L = 1,0
μ = 0,08 - усредненный коэффициент трения рулевого механизма, определенный по формуле (25).
С учетом принятых допущений 1 и 2 определим КПД рулевого механизма с наличием опрокидывающего момента на поршне по формуле (21).

Таким образом потери КПД от изгибающего момента на поршне составят:
Δη = η1-η2 = 0,893-0,834 = 0,059 (27)
или 5,9%.
Рулевой механизм работает следующим образом.
При вращении рулевого колеса автомобиля происходит поворот рулевого вала с винтом 5 и ротора распределителя, относительно неподвижных, под усилием сопротивления повороту, колес автомобиля. Угловое перемещение ротора распределителя, определяет направление движения рабочей жидкости, подаваемой к рабочим полостям 3 или 4 корпуса 1.
Вследствие этого происходит перемещение поршня 2 в том или ином направлении, следовательно, угловое перемещение зубчатого сектора 10, который поворачивая вал 11 рулевой сошки, управляет поворотом колес автомобиля. Движение поршня 2 создает вращение винта 5 в направлении, обратном начальному, благодаря чему гильза распределителя возвращается в первоначальное относительно ротора положение, т.е. в нейтральное положение.
Преимуществом предлагаемого рулевого механизма является то, что оси поршня и винта лежат в начальной плоскости реечной передачи, а это позволяет уменьшить силы трения в механизме, и, как следствие, износ трущихся поверхностей поршня и корпуса, что повышает надежность рулевого механизма.
Другим преимуществом является повышение КПД механизма, которое составляет 5,9%.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА СО ВСТРОЕННЫМ УСИЛИТЕЛЕМ | 1999 |
|
RU2172692C2 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА СО ВСТРОЕННЫМ УСИЛИТЕЛЕМ | 2001 |
|
RU2211777C2 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА СО ВСТРОЕННЫМ УСИЛИТЕЛЕМ | 1999 |
|
RU2179132C2 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА СО ВСТРОЕННЫМ УСИЛИТЕЛЕМ | 1999 |
|
RU2172693C2 |
| Шариковинтовой гидроусилитель рулевого управления транспортного средства | 2017 |
|
RU2667859C1 |
| Шариковинтовой гидроусилитель рулевого управления транспортного средства. | 2019 |
|
RU2711092C1 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОУСИЛИТЕЛЕМ | 1993 |
|
RU2041102C1 |
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| Зубодолбежный станок | 1989 |
|
SU1713762A1 |
| РУЛЕВОЙ МЕХАНИЗМ ТРАНСПОРТНОГО СРЕДСТВА С ГИДРОУСИЛИТЕЛЕМ | 1993 |
|
RU2041103C1 |
Изобретение относится к транспортному машиностроению, в частности к рулевым механизмам со встроенным гидравлическим усилителем. Рулевой механизм содержит корпус, в котором установлен поршень и, соосно ему, винт, кинематически связанные шариковинтовой передачей. На поршне выполнена зубчатая рейка, зубья которой образуют реечную передачу с зубьями зубчатого сектора, который жестко связан с валом рулевой сошки. В зубьях выполнены пазы, в которых размещен винт. Поверхности пазов эквидистанты поверхности винта. Оси поршня и винта лежат в начальной плоскости реечной передачи. Технический результат достигаемый изобретением выражается в уменьшении износа поршня и корпуса, снижении сил трения, повышении КПД рулевого механизма. 1 з.п. ф-лы, 3 ил.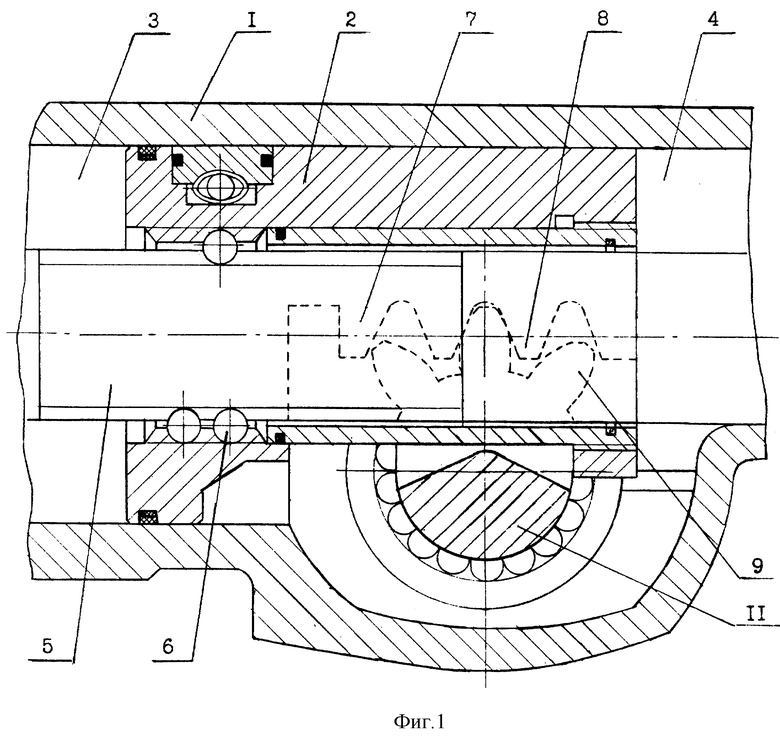
| КАТАЛОГ ФИРМЫ "ZAHNRAD FABRIK", ФРГ, 1985 | |||
| Рулевой механизм с рейкой,шестерней и с усилителем | 1984 |
|
SU1322974A3 |
| АНАЛОГОВЫЙ СУММАТОР НАКАПЛИВАЮЩЕГО ТИПА | 0 |
|
SU188158A1 |

