Изобретение относится к измерительной технике и может быть использовано при создании приборов и систем для измерения частоты следования импульсов с широким диапазоном.
Известны различные способы измерения частоты. Так, в "Цифровом способе измерения частоты" согласно а. с. 864162, СССР, МКИ G 01 R 23/00, 1981 г. используется вычитание в течение периода измеряемой частоты из записанного ранее числа, соответствующего максимуму диапазона измерения, некоторого количества импульсов, частота которых уменьшается через равные интервалы времени обратно пропорционально разности квадрата и 1-й степени номера текущего интервала. Остаток в конце периода характеризует текущую измеряемую частоту. Способ используется, главным образом, для измерения низких частот. Его недостатками являются малый диапазон измерения и невысокая точность.
Другой известный "Способ измерения частоты следования импульсов", а.с. 714302, СССР, МКИ G 01 R 23/02, 1980 г., основан на подсчете числа целых периодов и определении дробных частей периодов измеряемой частоты, попавших в нормированный интервал измерения. Целые и дробные части периодов учитываются при подсчете частоты, что увеличивает точность. За счет дополнительного измерения длительности последнего целого периода в каждом интервале достигается повышение динамичности контроля изменяющейся частоты. К недостаткам этого способа относятся ограниченность диапазона измерения, определяемая требованием, чтобы период измеряемой частоты был много меньше интервала измерения, а также сложность технической реализации.
Известен также "Способ измерения частоты вращения частей машин" согласно пат. 148163, ПНР, МКИ G 01 P, 3/489, 1989 г. В этом способе на каждый измерительный импульс формируется ряд дополнительных импульсов в интервале времени, зависящем от измеряемой частоты и меньшем интервала между двумя последовательными измерительными импульсами. Число дополнительных импульсов подсчитывается и служит оценкой измеряемой частоты. Способ обеспечивает высокое быстродействие, но в ограниченном диапазоне частот. К его недостаткам относится также невысокая точность из-за неучета дробных частей периодов дополнительных импульсов в интервале измерения.
Наиболее близким по технической сущности к предлагаемому изобретению является "Способ измерения частоты С.А.Самарина" согласно а.с. 885913, СССР, МКИ 5 G 01 R 23/00, 1981 г. Способ включает квантование образцового интервала времени импульсами измеряемой частоты и подсчет числа последних, формирование непрерывной шкалы эталонных меток времени, период следования которых равен образцовому интервалу времени Tо, фиксирование числа Ni импульсов измеряемой частоты на предшествующем текущему образцовом интервале времени, измерение интервала времени τ от момента появления последней метки времени до текущего момента времени и подсчет числа импульсов N(τ) измеряемой частоты на интервале τ. Текущий результат определяют по формуле: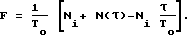
Последние два члена формулы дают поправку на изменение частоты на текущий момент времени по сравнению с предшествующим образцовым интервалом, что снижает динамическую погрешность измерения. Недостаток этого известного способа определяется самим выбранным принципом, т.е. квантованием образцового интервала времени импульсами измеряемой частоты и подсчетом числа последних. Для получения необходимой точности при этом должно выполняться требование, чтобы на образцовом интервале времени (и в Tо, и в τ ) размещалось достаточно большое число импульсов измеряемой частоты - около 100, 200 и т. п. Следовательно, способ не позволяет осуществлять измерения частот, импульсы которых следуют через интервалы времени, сравнимые или значительно большие образцового интервала времени, т.е. условно, средних и низких частот. Очевидное, казалось бы, решение этого вопроса путем увеличения образцового интервала времени и пределов счета импульсов (разрядности счетчика), чтобы охватить низкие, средние и высокие частоты, приводит к соответствующему увеличению интервалов между отсчетами результатов измерений. Это опасно, например, из-за возможной потери информации о быстроразвивающейся аварийной ситуации на высоких частотах. Особую остроту это приобретает, когда измеритель частоты включен в контур автоматического управления объектом. Противоречие таким образом определяется особенностью измерения и использования частоты в широком диапазоне, когда низкие частоты требуют большого времени обработки, а высокие частоты - малого времени между отсчетами результатов. Между тем потребность в способе, позволяющем автоматически, без вмешательства оператора осуществлять измерения в широком диапазоне частот и отслеживать большие и быстрые изменения частоты вовремя одного эксперимента, существует. Примерами могут служить эксперименты по доводке и испытаниям, а также мониторингу турбин авиадвигателей или объектов энергетики, когда частоты вращения могут изменяться от нескольких десятков и даже сотен оборотов в секунду при нормальной работе до 1-2 и менее оборотов в минуту при останове, т. е. на 4 порядка. Этот известный способ имеет также недостаточную точность, т.к. не учитывает дробных частей периодов измеряемой частоты на образцовом интервале времени Tо и дополнительном интервале τ . Это особенно проявляется в нижней части контролируемого диапазона частот.
Задача таким образом состоит в расширении возможностей по диапазону измеряемых частот и контролю их изменений во времени, при одновременном повышении точности.
Сущность предлагаемого изобретения заключается в том, что в способ измерения частоты импульсов, в котором формируют непрерывную последовательность эталонных меток времени с периодом следования Tо и образцовые интервалы Tоб времени путем счета эталонных меток времени, подсчитывают количество M периодов измеряемой частоты в пределах образцовых интервалов времени, а текущий результат определяют по формуле F = M/Tоб, введены новые операции, а именно путем счета эталонных меток времени формируют минимальные Tм, отсчетные Tот и предельные Tп интервалы времени, устанавливают границы образцовых интервалов времени с дискретностью Tо по моменту прихода последнего импульса измеряемой частоты в последнем целом минимальном интервале перед началом отсчетного интервала, так что начало текущего образцового интервала совпадает с концом предшествующего образцового интервала, отсчитывают числа Nн и Nк эталонных меток времени от начала предельного интервала до соответственно начала и конца образцового интервала, вычисляют длительность последнего по формулам:
Tоб = Tо(Nк-Nн), если Nк > Nн,
или
Tоб = Tо(Nк-Nн)+Tп, если Nк ≅ Nн,
подсчитывают числа Mj импульсов измеряемой частоты в минимальных интервалах и вычисляют количество периодов M измеряемой частоты путем суммирования чисел Mj в пределах образцового интервала, исключая первый импульс в начале этого интервала, при этом минимальный интервал Tм выбирают большим периода меток времени Tо, предельный интервал Tп выбирают равным или большим периода низшей измеряемой частоты, длительность отсчетного интервала Tот программным способом устанавливают в границах от минимального до предельного интервала, в зависимости от использования измеряемых данных, а обновление выходных результатов производят в каждом отсчетном интервале, если период измеряемой частоты не превосходит отсчетного интервала, и в каждом периоде измеряемой частоты - в противном случае.
Сопоставительный анализ заявленного технического решения с прототипом показывает, что оно отличается от известного тем, что в нем:
- путем счета эталонных меток времени формируют минимальные Tм, отсчетные Tот и предельные Tп интервалы времени,
- устанавливают границы образцовых интервалов времени с дискретностью Tо по моменту прихода последнего импульса измеряемой частоты в последнем целом минимальном интервале перед началом отсчетного интервала, так что начало текущего интервала совпадает с концом предшествующего образцового интервала,
- отсчитывают числа Nн и Nк эталонных меток времени от начала предельного интервала до соответственно начала и конца образцового интервала,
- вычисляют длительность образцового интервала по формулам:
Tоб = Tо(Nк-Nн), если Nк > Nн,
или
Tоб = Tп+Tо(Nк-Nн), если Nк ≅ Nн,
- подсчитывают числа импульсов Mj измеряемой частоты в минимальных интервалах,
- вычисляют количество периодов M измеряемой частоты путем суммирования чисел Mj в пределах образцового интервала, исключая первый импульс в начале этого интервала, при этом:
- минимальный интервал Tм выбирают большим периода верхней измеряемой частоты и периода времени Tо,
- предельный интервал Tп выбирают равным или большим периода низшей измеряемой частоты,
- длительность отсчетного интервала Tот программным способом устанавливают в границах от минимального до предельного интервала, в зависимости от использования измеряемых данных,
- обновление выходных результатов измерений производят в каждом отсчетном интервале, если период измеряемой частоты не превосходит отсчетного интервала, и в каждом периоде измеряемой частоты - в противном случае.
Перечисленные отличия позволяют сделать вывод о соответствии заявленного технического решения критерию "новизна". Признаки, по совокупности отличающие заявленное тех. решение от прототипа, не выявлены в других тех.решениях при изучении данной и смежных областей техники. Они позволяют получить новое качество при измерениях частоты импульсов: способность без переключений измерять частоты в широком диапазоне и оперативно отслеживать изменения высоких, средних и низких частот во времени. Кроме того, за счет привязки границ образцового интервала с высокой точностью к импульсам измеряемой частоты исключаются дробные части периодов измеряемой частоты в образцовом интервале, что повышает точность измерений. Это доказывает соответствие заявленного тех.решения критерию "существенные отличия".
В иллюстрациях приведены следующие графические изображения:
- фиг. 1 - укрупненная структурная схема 1-го варианта реализации способа;
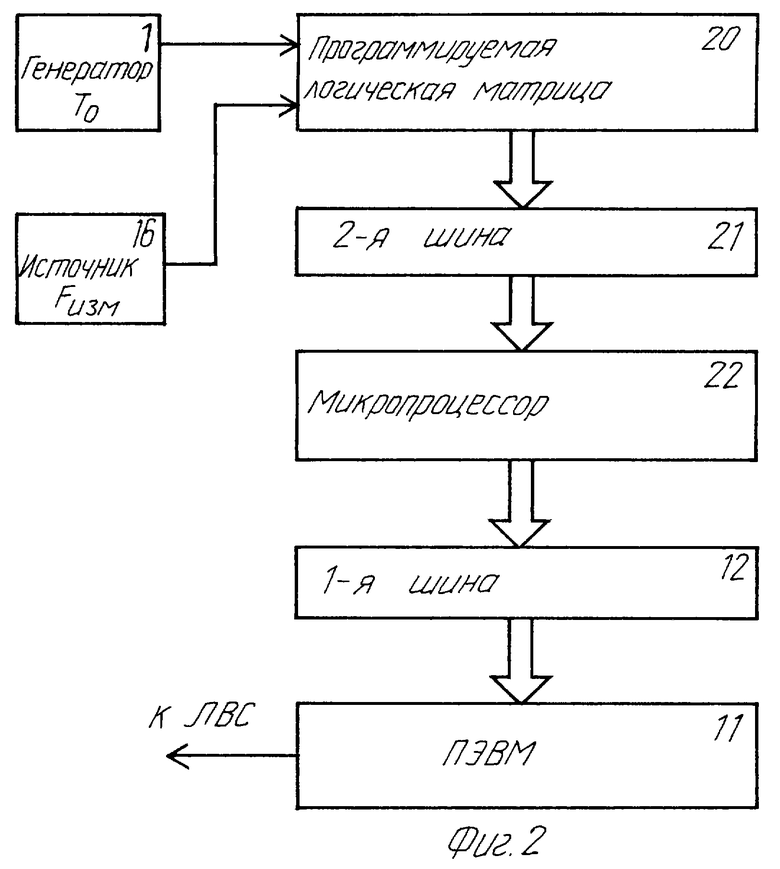
- фиг. 2 - укрупненная структурная схема 2-го варианта реализации способа;
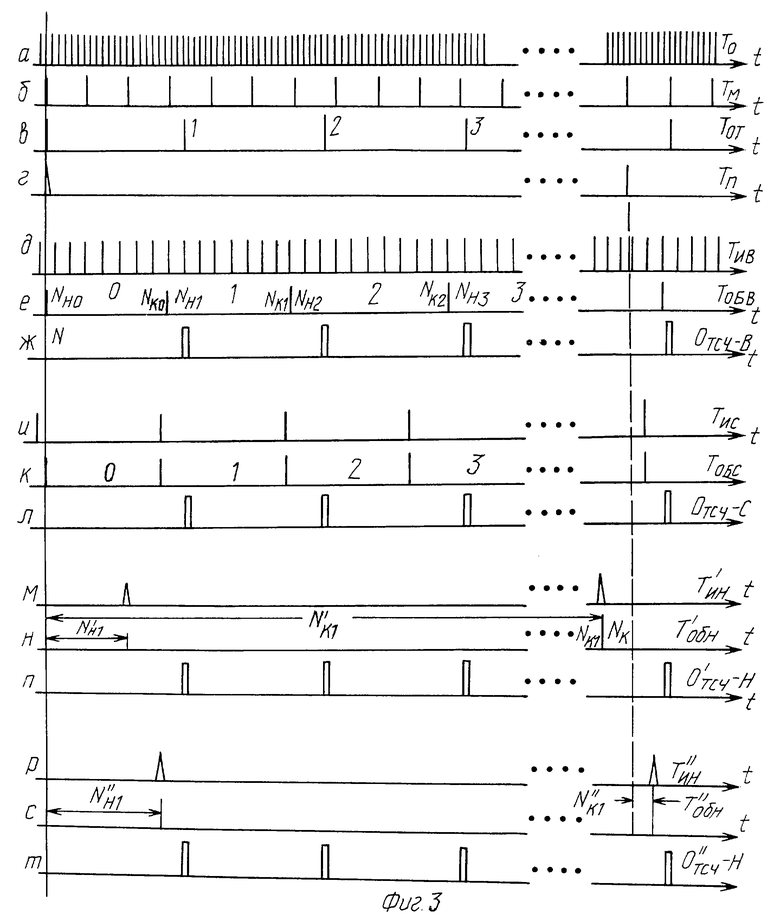
- фиг. 3 - эпюры напряжений.
Схема для 1-го варианта реализации способа (см. фиг. 1) содержит кварцованный генератор 1 меток времени, выход которого соединен со счетным входом 1-го счетчика 2 и с 1-м входом таймера 3, второй вход которого соединен с выходом старшего разряда 1-го счетчика 2, подключенного также к счетному входу 2-го счетчика 4, выходом старшего разряда соединенного с 3-м входом таймера 3, а кодовыми выходами связанного с входами старших разрядов 3-го регистра 5, чьи входы младших разрядов через 5-й регистр 6 соединены с выходами 1-го регистра 7, своими кодовыми входами подключенного к выходам 1-го счетчика 2. Третий регистр 5 своими выходами параллельно подсоединен к кодовым входам 4-го регистра 8 и к третьей группе кодовых входов 6-го регистра 9, своей второй группой кодовых входов связанного с выходом 4-го регистра 8, первой группой кодовых входов - с выходами накапливающего сумматора 10 через 7-й регистр 15, а первой, второй и третьей группами выходов - с входами персональной ЭВМ 11 через шину 12. Накапливающий сумматор 10 своим информационным входом через 8-й регистр 17 подсоединен к выходу 3-го счетчика 13, который этим же выходом подключен к 4-му входу блока управления 14, чьи 1-, 2- и 3-й входы соединены с соответствующими 1-, 2- и 3-м выходами таймера 3, пятый вход параллельно со счетным входом 3-го счетчика 13 подключен к выходу источника импульсов измеряемой частоты 16, а управляющие и обнуляющие выходы подсоединены к соответствующим управляющим и обнуляющим входам счетчиков 2, 4, 13, регистров 5, 6, 7, 8, 9, 15, 17, сумматора 10 и таймера 3.
Схема работает следующим образом. После включения питания блок управления 14 обнуляет подсоединенные к нему счетчики, регистры, сумматор 10 и таймер 3. Кварцованный генератор 1 вырабатывает метки времени с периодом следования Tо (см. фиг. 3а), которые поступают на таймер 3 и на 1-й счетчик 2 и через него на 2-й счетчик 4. Счетчики 2 и 4 работают циклически. Таймер 3 на основе сигнала старшего разряда счетчика 2 и меток времени Tо вырабатывает минимальные интервалы времени Tм (1-й выход), границы которого показаны импульсами на фиг. 3б, а на основе сигнала старшего разряда счетчика 4 - предельные интервалы Tп (3-й выход, см. фиг. 3г). В соответствии с заложенной в него программой таймер 3 вырабатывает также отсчетные интервалы Tот (2-й выход, см. фиг. 3в), периодичность которых определяется решаемыми при использовании измеряемых данных задачами. Если, например, важнее всего отследить быстрые изменения высокой частоты, пренебрегая излишней загрузкой текущими данными ПЭВМ, то интервал Tот выбирается близким к минимальному интервалу Tм. Если же характер работы контролируемого механизма таков, что быстрые изменения измеряемой частоты невозможны и требуется лишь неспешный мониторинг, то интервал Tот выбирается близким к предельному интервалу Tп, который сам выбирается несколько большим или равным периоду низшей измеряемой частоты. Чаще всего выбирается компромисс. Минимальный интервал Tм выбирается большим периода верхней измеряемой частоты и периода меток времени Tо и определяется частотой генератора 1 и разрядностью счетчика 2. Период Tо выбирается как можно меньше, с учетом быстродействия элементов и разумной разрядности счетчиков 1 и 2. Выходные сигналы таймера 3, соответствующие границам интервалов Tм, Tот, Tп, поступают на блок управления 14, который вырабатывает управляющие сигналы для всей схемы, используя также импульсы измеряемой частоты от источника 16 и выходные сигналы разрядов 3-го счетчика 13. Дальнейшую работу схемы удобно рассматривать отдельно для высоких, средних и низких измеряемых частот.
На фиг. 3д показаны импульсы достаточно высокой измеряемой частоты, период следования которых Tив меньше Tм и значительно меньше отсчетного интервала Tот. Третий счетчик 13 подсчитывает количество этих импульсов в каждом минимальном интервале, обнуляясь в конце этого интервала своим импульсом обнуления от блока управления 14. По каждому измеряемому импульсу блок управления 14 вырабатывает управляющий сигнал, по которому подсчитанное на этот момент счетчиком 2 число меток времени записывается в 1-й регистр 7, замещая в нем ранее записанное число. По приходу очередного импульса минимального интервала, заканчивающего этот интервал, блок управления 14, удостоверившись, что в этом интервале счетчиком 13 зафиксирован хотя бы один импульс измеряемой частоты (хотя бы в одном разряде - "единица"), дает команду 5-му регистру 6 на перезапись в него из первого регистра 7 числа меток, соответствующего последнему измеряемому импульсу на данном минимальном интервале. Одновременно блок управления 14 дает команду на перезапись в старшие разряды 3-го регистра 5 числа минимальных интервалов, подсчитанных 2-м счетчиком 4 на момент прохождения последнего измеряемого импульса. Так происходит в каждом целом минимальном интервале, причем подсчитанные в этих циклах счетчиком 13 количества импульсов измеряемой частоты Mj и зафиксированные 8-м регистром 17 суммируются сумматором 10 и заносятся в 7-й регистр 15. Первый же пришедший после включения питания импульс отсчетного интервала (фиг. 3в) определит начало 1-го образцового интервала времени по моменту прихода последнего импульса измеряемой частоты в последнем целом минимальном интервале, предшествующем отсчетному импульсу (см. фиг. 3е), и одновременно конца нулевого интервала. Записанные в 3-м регистре 5 на момент начала 1-го образцового интервала число меток времени от 1-го счетчика 2 и число минимальных циклов от 2-го счетчика 4, совместно образующие общее число меток времени Nн1 до начала первого образцового интервала от начала предельного интервала, по команде от блока 14 переписывается в 4-й регистр 8. Накопленное сумматором 10 и хранящееся в 7-м регистре 15 число измерительных импульсов, соответствующее нулевому "образцовому" интервалу, переписывается в регистр 9, а сумматор 10 обнуляется. Результаты нулевого интервала (сразу после включения) не используются, т.к. его начало не привязано к измерительным импульсам, а это может привести к ошибкам. В первом образцовом интервале времени (см. фиг. 3) схема работает, как и ранее. К моменту появления 2-го импульса отсчетного интервала (фиг. 3в) в 3-м регистре 5 хранится число меток времени Nк1 от начала предельного интервала до момента последнего импульса измеряемой частоты в последнем целом минимальном интервале, соответствующего концу 1-го образцового интервала (см. фиг. 3е). Число M1 импульсов измеряемой частоты, подсчитанное 3-м счетчиком 13 и накопленное сумматором 10, относится к 1-му образцовому интервалу и хранится в 7-м регистре 15. По приходу 2-го отсчетного импульса блок управления вырабатывает команды, по которым число M1 из 7-го регистра 15 переписывается в 1-ю группу адресов 6-го регистра 9 (сумматор 10 обнуляется), число Nк1 - в 3-ю группу адресов 6-го регистра 9, а число Nн1 - во 2-ю группу адресов 6-го регистра 9. Одновременно в 4-й регистр 8 заносится число Nк1 из 3-го регистра 5, которое во 2-м образцовом интервале будет соответствовать его началу (Nк1 = Nн2). Числа Nн1, Nк1 и M1, соответствующие 1-му образцовому интервалу, из 6-го регистра 9 через шину 12 поступают в персональную ЭВМ 11, в процессоре которой вычисляется разность Nк1-Nг1, с учетом знака, пропорциональная продолжительности 1-го образцового интервала, и определяется текущая измеряемая частота F1 = M1/Tоб1 = M1/Tо(Nк1-Nн1). Величина Tо хранится в памяти процессора. Результаты измерений могут быть отображены в цифровом виде или в виде графика на мониторе ПЭВМ, отпечатаны на принтере или через локальную вычислительную сеть переданы в ЭВМ более высокого уровня для использования, например, в АСУТП. В принципе вместо ПЭВМ могут быть использованы более простые специализированные устройства (сумматор, умножитель, цифровой индикатор и т.п.), но при этом возможности ограничены.
В последующих образцовых интервалах схема работает аналогично, за исключением зоны перехода от одного предельного интервала к другому предельному интервалу, когда может оказаться, что Nк ≅ Nн. Это будет рассмотрено позднее, применительно к низким частотам.
Отсчеты обновляются через каждый отсчетный интервал (на фиг. 3ж это условно показано заштрихованными столбиками). Благодаря этому оперативно отслеживается даже кратковременное изменение измеряемой высокой частоты.
При измерениях средних частот (см. фиг. 3и), когда период измеряемой частоты близок к отсчетному интервалу, в работе схемы имеется одна особенность, связанная с тем, что не в каждый минимальный интервал попадает измерительный импульс (в отличие от высоких частот). В таких интервалах 3-й счетчик 13 во всех разрядах показывает "нули", и блок управления 14 не вырабатывает команду на изменение содержимого регистров 6 и 5, пока не придет импульс измеряемой частоты. Образцовые интервалы могут заметно отличаться по продолжительности, если период Tис лишь немного меньше Tот, но это не отражается на точности, т.к. их продолжительность известна точно, с дискретностью до Tо и погрешностью ~ 10-5, определяемой кварцем, а число периодов измеряемой частоты всегда точно укладывается в образцовый интервал. Обновление данных в отсчетах, следующих через интервал Tот, может осуществляться как через каждый отсчетный интервал, при Tис ≅ Tот, так и через каждый период измеряемой частоты Тис, если он превосходит отсчетный интервал Tот (см. фиг. 3л).
При измерении низких частот, когда их период Tин значительно превосходит не только минимальный интервал Tм, но и отсчетный интервал Tот, схема работает, в принципе, так же, как и при измерении высоких и средних частот. Особенность заключается в том, что в подавляющую часть минимальных интервалов не попадают измерительные импульсы, соответственно 3-й счетчик 13 показывает "нули", и перезапись данных в регистры 6, 5, 4 и 9 происходит редко, только после прохождения импульса измеряемой частоты. Здесь возможны два варианта. В первом из них оба импульса некоторого периода измеряемой частоты располагаются внутри предельного интервала Tп (см. фиг. 3м), образцовый интервал полностью находится в границах одного предельного интервала, так что Nк > Nн и разность (Nк - Nн) > 0. При этом длительность образцового интервала равна Tоб = Tо(Nк-Nн), а текущая частота подсчитывается ПЭВМ по формуле:
Fтек = M/Tоб = M/Tо(Nк-Nн).
Заметим, что число периодов M = 1 и обновление отсчетных данных происходит в каждом периоде измеряемой частоты (см. фиг. 3н, п).
Во втором варианте вследствие несинхронности измеряемых импульсов и меток времени, начало и конец некоторого периода измеряемой частоты T''ин и образцового интервала T''обн могут оказаться в соседних предельных интервалах (см. фиг. 3р, с). При этом Nк ≅ Nн и разность (Nк - Nн) ≅ 0, длительность образцового периода равна Tоб = Tп + (Nк - Nн)•Tо, а текущая частота подсчитывается ПЭВМ по формуле:
Обновление данных происходит в каждом периоде измеряемой частоты (см. фиг. 3т).
Заметим, что с учетом знака разности (Nк - Nн) ≅ 0 всегда Tоб ≅ Tп. Это определяется условием, что максимальный период измеряемой частоты не должен превосходить предельного интервала.
На современной элементной базе и с использованием развитого программного обеспечения способ может быть реализован также по схеме, представленной на фиг. 2. Схема по 2-му варианту реализации содержит последовательно соединенные кварцованный генератор меток времени 1, программную логическую матрицу (ПЛМ) 20, вторую шину 21, микропроцессор 22, первую шину 12 и персональную ЭВМ 11, при этом ко 2-му входу программируемой матрицы 20 подсоединен выход источника сигналов измеряемой частоты 16. Схема по второму варианту работает аналогично схеме по первому варианту, при этом 1-я шина 12 и ПЭВМ 11 решают те же задачи, что и в схеме на фиг. 1, программируемая логическая матрица 20 выполняет функции 1-го счетчика 2, 1-го регистра 7, 5-го регистра 6, 3-го счетчика 13 и частично блока управления 14 из схемы на фиг. 1, 2-я шина служит для связи матрицы 20 и микропроцессора 22, а микропроцессор 22 выполняет функции остальных элементов схемы на фиг. 1. Программное обеспечение ПЛМ 20, микропроцессора 22 и ПЭВМ 11 может быть при необходимости представлено.
Элементы схем на фиг. 1 и 2 реализуются на основе серийных микросхем и других технических средств широко известными методами, в частности в качестве ПЛМ 20 может использоваться ПЛМ серии FLEX8000 фирмы "ALTERA", в качестве микропроцессора - RISC- процессор типа ADSP2181, в качестве ПЭВМ - PC ЭВМ типа "Pentium" или др. Блок управления 14 из схемы на фиг. 1 также может быть реализован на основе ПЛМ той же серии. Персональная ЭВМ, кроме подсчета частот, может решать и другие задачи, исходные данные по которым поступают через другие порты.
Заявленный способ был реализован по схеме на фиг. 2, при этом специальная часть, без шины 12 и ПЭВМ 11, размещена на плате (модуле) с габаритами 100х130х15 мм.
При частоте кварцевого генератора 8 МГц (Tо = 0,125 мкс) и общем числе разрядов 1-го и 2-го счетчиков, равном 64, реализованы интервалы Tм ~ 30 мкс, Tп~ 8 мин и Tот = 2 мс.
При этом обеспечиваются, с одной стороны, измерения частот, без переключений, в диапазоне от 0,002 Гц до 400 кГц (более 8 порядков), с другой стороны, отслеживание изменений высокой частоты через интервал 2 мс (может программно изменяться), а средних и низких частот - через каждый их период; и погрешность измерения частоты менее 0,01%.
Заявленный способ обладает следующими преимуществами по сравнению с прототипом:
- значительное расширение диапазона измеряемых, без переключений, частот (на несколько порядков);
- повышение динамичности отслеживания больших и быстрых изменений высоких частот с периодичностью контроля в несколько миллисекунд и чаще, или реже, а средних и низких частот - через каждый их период;
- повышение точности измерений путем адаптации образцового интервала к периодам измеряемой частоты и высокоточного отсчета его продолжительности и тем самым исключения влияния дробных частей периода измеряемой частоты в пределах образцового интервала.
Экономический эффект в настоящее время не может быть оценен, но при широком распространении способа он может быть значительным.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХШКАЛЬНЫЙ НОНИУСНЫЙ СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1994 |
|
RU2087025C1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1991 |
|
RU2012132C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2402025C2 |
| ДВУХШКАЛЬНЫЙ НОНИУСНЫЙ СПОСОБ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1990 |
|
RU2054707C1 |
| РАДИОЛОКАЦИОННЫЙ ДАЛЬНОМЕР | 1999 |
|
RU2151408C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2300112C2 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВ И ФОРМИРОВАНИЯ УГЛОВЫХ МЕТОК | 1995 |
|
RU2115885C1 |
| Счетно-импульсный способ измерения частоты следования импульсов | 1974 |
|
SU572714A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ | 1991 |
|
RU2010286C1 |
| Цифровой измеритель периода | 1978 |
|
SU771563A1 |
Изобретение относится к измерительной технике и может быть использовано при создании приборов и систем для измерения частоты следования импульсов в широком диапазоне. Технический результат - расширение диапазона измерений частоты без переключений, улучшение динамичности отслеживания изменений частоты во времени и снижение погрешности. Способ основан на формировании эталонных меток времени с периодом Тo и образцовых интервалов времени Тоб, а также числа М периодов измеряемой частоты в образцовом интервале, с последующим вычислением текущей частоты по формуле Fтек = М/Тоб и отличается тем, что в нем границы образцовых интервалов устанавливаются по моментам прихода импульсов измеряемой частоты, положение этих границ определяется по числу эталонных меток времени от начала предельного интервала, выбираемого большим или равным периоду низшей измеряемой частоты, до начала (Nн) и конца (Nк) образцового интервала, а длительность образцового интервала определяется как Тоб= Tо (Nк - Nн). 3 ил.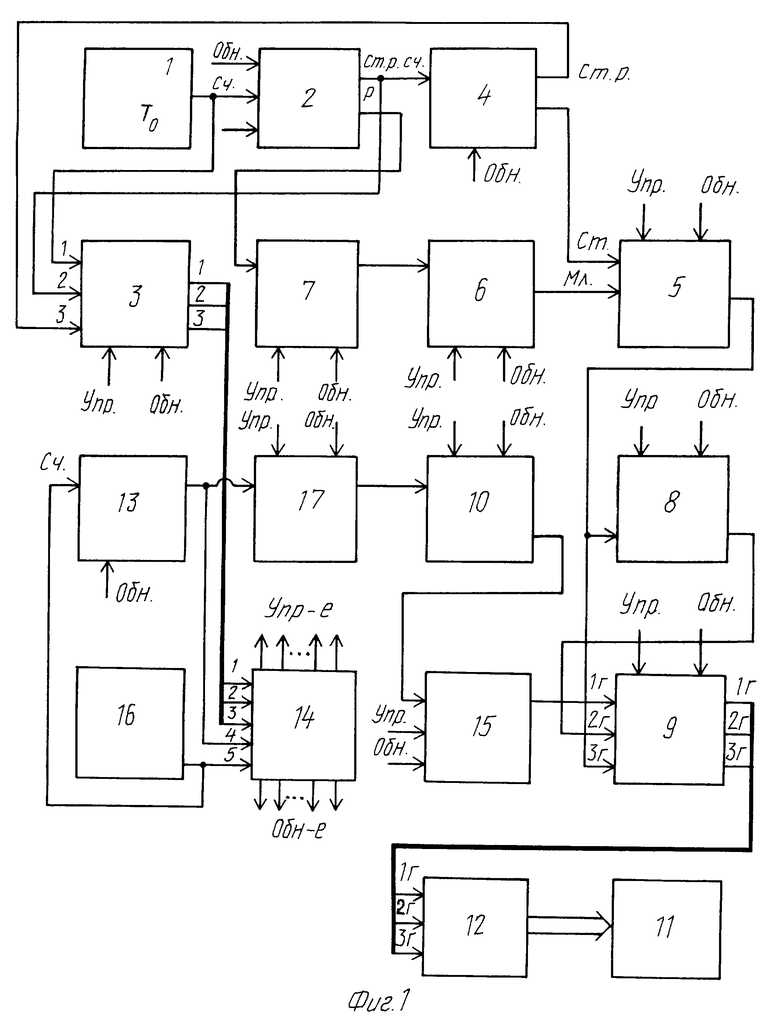
Способ измерения частоты импульсов, в котором формируют непрерывную последовательность эталонных меток времени с периодом следования Tо и образцовые интервалы Тоб времени путем счета эталонных меток времени, подсчитывают количество М периодов измеряемой частоты в пределах образцовых интервалов времени, а текущий результат определяют по формуле F = M/Tоб, отличающийся тем, что путем счета эталонных меток времени формируют минимальные Тм, отсчетные Тот и предельные Тп интервалы времени, устанавливают границы образцовых интервалов времени с дискретностью Tо по моменту прихода последнего импульса измеряемой частоты в последнем целом минимальном интервале перед началом отсчетного интервала, так что начало текущего образцового интервала совпадает с концом предшествующего образцового интервала, отсчитывают числа Nн и Nк эталонных меток времени от начала предельного интервала до соответственно, начала и конца образцового интервала, вычисляют длительность последнего по формулам
Tоб = Tо(Nк - Nн), если Nк > Nн,
или Tоб = Тп + Tо(Nк - Nн), если Nк ≅ Nн, подсчитывают числа импульсов Mj измеряемой частоты в минимальных интервалах и вычисляют количество периодов М измеряемой частоты путем суммирования чисел Mj в пределах образцового интервала, исключая первый импульс в начале этого интервала, при этом минимальный интервал Тм выбирают большим периода верхней измеряемой частоты и периода меток времени Tо, предельный интервал Тп выбирают равным или большим периода низшей измеряемой частоты, длительность отсчетного интервала Tот устанавливают в границах от минимального до предельного интервала, в зависимости от использования измеряемых данных, а обновление выходных результатов измерений производят в каждом отсчетном интервале, если период измеряемой частоты не превосходит отсчетного интервала, и в каждом периоде измеряемой частоты - в противном случае.
| Способ измерения частоты с.а.самарина | 1979 |
|
SU885913A1 |
| Цифровой способ измерения частоты | 1979 |
|
SU864162A1 |
| Способ измерения частоты следования импульсов | 1976 |
|
SU714302A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2017162C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ | 1999 |
|
RU2150119C1 |
| US 4326256, 20.04.1982 | |||
| DE 3811735 Al, 19.10.1989. | |||

