Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, регулирования и аварийной защиты, в которых исходная информация, подлежащая анализу, представлена в частотной форме.
Известен способ измерения частоты импульсов [1], основанный на формировании эталонных меток времени с периодом То и образцовых интервалов времени Тоб, а также числа М периодов измеряемой частоты в образцовом интервале, с последующим вычислением текущей частоты по формуле  , причем границы образцовых интервалов устанавливаются по моментам прихода импульсов измеряемой частоты, положение этих границ определяется по числу эталонных меток времени от начала предельного интервала, выбираемого большим или равным периоду низшей измеряемой частоты до начала (NH) и конца (NK) образцового интервала, а длительность образцового интервала определяется как Тоб=То·(NK-NH).
, причем границы образцовых интервалов устанавливаются по моментам прихода импульсов измеряемой частоты, положение этих границ определяется по числу эталонных меток времени от начала предельного интервала, выбираемого большим или равным периоду низшей измеряемой частоты до начала (NH) и конца (NK) образцового интервала, а длительность образцового интервала определяется как Тоб=То·(NK-NH).
Первым существенным недостатком этого способа является его низкая надежность измерения частоты, обусловленная возможностью сбоев в измерении, вызванных асинхронностью (неразделенностью во времени) некоторых процессов счета импульсов и запоминания полученной информации, а также асинхронностью процессов запоминания полученных в результате счета чисел М, NH, NK и считывания этих чисел микропроцессорной системой (ПЭВМ) для вычисления значения частоты. Случайное совпадение по времени этих асинхронных процессов может привести к искажению информации и, тем самым, к недопустимо большим значениям погрешности измерения, что равнозначно сбою в измерении.
В частности, к таким сбоям может привести асинхронность процессов счета числа Mj импульсов измеряемой частоты Fx и формирования минимальных интервалов времени Тм, по истечении которых осуществляется считывание информации, полученной в результате этого счета. В данном случае при поступлении очередного импульса измеряемой частоты Fx в соответствующем счетчике начнется процесс формирования конкретного числа и если в это же время поступит импульс считывания, то с выхода счетчика будет снята недостоверная информация.
Вторым существенным недостатком рассматриваемого способа измерения частоты является сложность его аппаратурной и программной реализации, что вызвано, прежде всего, наличием четырех опорных интервалов времени и многоступенчатой системы передачи и запоминания полученной в результате измерения информации. Кроме того, при измерении может оказаться, что NK<NН, поэтому алгоритм определения частоты должен включать в себя дополнительные операции, связанные с определением знака разности NК-NН и вычислением частоты по более сложной формуле.
Известен способ измерения частоты [2], принятый за прототип, заключающийся в преобразовании исследуемых сигналов частоты Fx в исследуемую последовательность импульсов той же частоты Fx (2, рис.4.21, фиг.1), в осуществлении одновременного счета n импульсов исследуемой последовательности и N счетных импульсов частоты Fсч, в определении значения частоты исследуемых сигналов по формуле  при этом формируются первые временные ворота длительностью Δt1, которые заполняются n импульсами исследуемой последовательности Fx, число n которых определяется путем счета и фиксируется, одновременно формируются вторые временные ворота длительностью Δt2, такие что их фронт соответствует импульсу исследуемой последовательности, появившемуся сразу после начала первых ворот, а срез - импульсу, возникающему сразу после окончания первых ворот. Вторые временные ворота заполняются счетными импульсами частоты Fсч, число N которых также определяется путем счета и фиксируется.
при этом формируются первые временные ворота длительностью Δt1, которые заполняются n импульсами исследуемой последовательности Fx, число n которых определяется путем счета и фиксируется, одновременно формируются вторые временные ворота длительностью Δt2, такие что их фронт соответствует импульсу исследуемой последовательности, появившемуся сразу после начала первых ворот, а срез - импульсу, возникающему сразу после окончания первых ворот. Вторые временные ворота заполняются счетными импульсами частоты Fсч, число N которых также определяется путем счета и фиксируется.
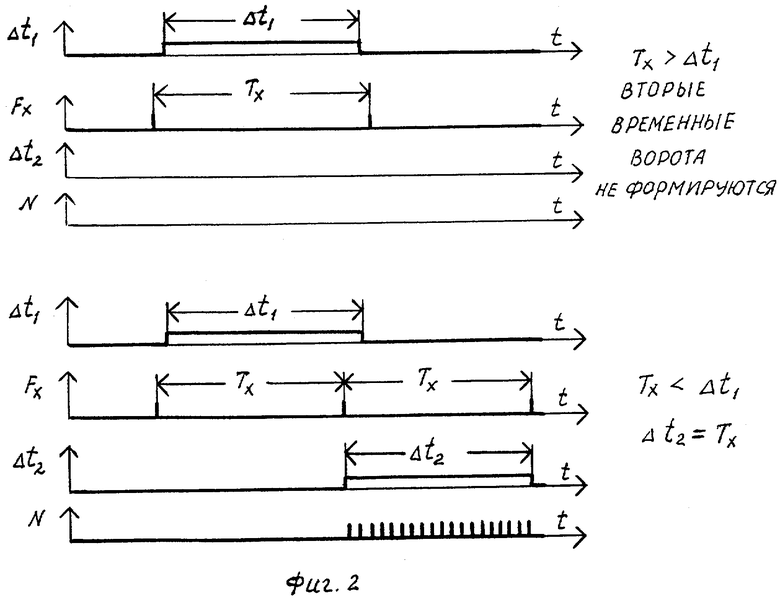
Первым существенным недостатком этого способа измерения частоты является значительное ограничение диапазона измерения частоты, обусловленное невозможностью измерения низких частот, так как максимальное значение периода Тxmax исследуемых сигналов должно быть меньшим длительности Δt1 первых временных ворот, то есть Txmax<Δt1 (фиг.2). Учитывая, что Fxmin=1/Txmax, из приведенного неравенства получаем зависимость, определяющую нижний предел измерения частоты: Fxmin≥1/Δt1. Так, например, при Δt1=10 мс Fxmin≥100 Гц.
Вторым существенным недостатком способа-прототипа является его низкая надежность измерения частоты, обусловленная возможностью сбоев в процессе измерения. Причиной таких сбоев является асинхронность процессов формирования первого временного окна и импульсов исследуемой последовательности Fx.
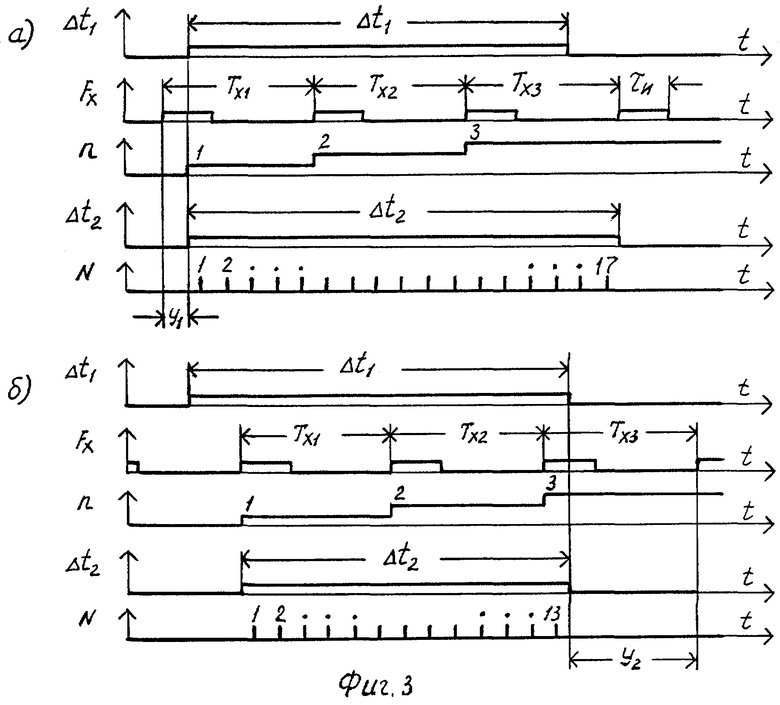
С целью упрощения описания рассматриваемого способа измерения частоты в [2] принято считать, что длительность τи импульсов исследуемой последовательности имеет бесконечно малую величину (2, рис.4.21-б, фиг.1). Однако на практике длительность τи этих импульсов имеет определенное значение, чаще всего соизмеримое с их периодом следования Тх.
При этом длительность вторых временных ворот не всегда будет равна целому числу n периодов Тх импульсов исследуемой последовательности. Так, например, если фронт первых временных ворот возникнет во время действия импульса исследуемой последовательности (фиг.3-а), то часть У1 периода Tx1 окажется за пределами вторых временных ворот и будет принимать случайные значения в пределах от 0 до τИ.
Если же во время действия импульса исследуемой последовательности возникнет срез первых временных ворот (фиг.3-б), то за пределами вторых временных ворот окажется часть У2 периода Тх3, принимающая случайные значения в пределах от (Тх-τи) до Тх.
При измерении низких частот, когда во вторые временные ворота входит малое число n периодов Тх исследуемой последовательности, некратность длительности Δt2 этих ворот целому числу периодов Тх приводит к недопустимо большим погрешностям, что равнозначно сбою в измерении частоты.
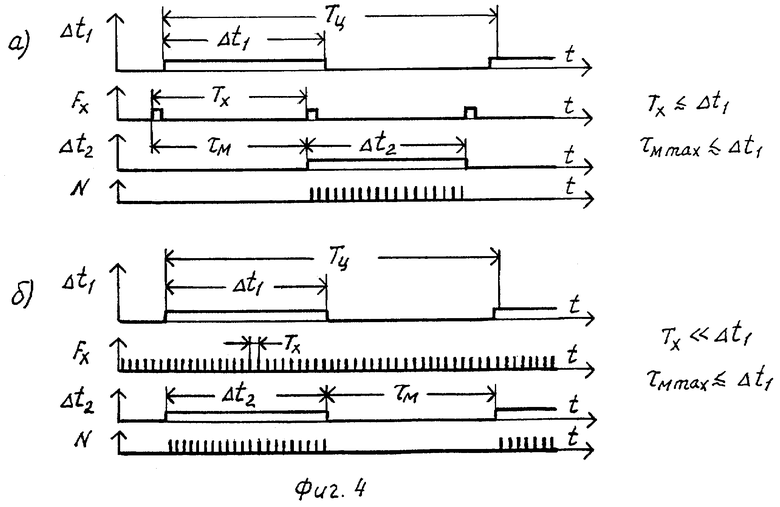
Третьим существенным недостатком способа-прототипа является то, что он предусматривает только однократное измерение частоты. Введение дополнительных операций может обеспечить многократные измерения частоты с циклом измерения, большим суммарной длительности двух первых временных ворот, то есть при Tц>2·Δt1 (фиг.4). Однако в этом случае при измерении частоты сигналов, период которых чуть меньше Δt1 (фиг.4-а), или значительно меньше Δt1 (фиг.4-б), появится новый существенный недостаток способа, обусловленный наличием «мертвого» времени τм, в течение которого измерение не производится, что существенно понижает эффективность (надежность) измерения частоты.
Известное устройство [3], выбранное в качестве аналога, содержит два программируемых счетчика импульсов, генератор счетных импульсов, регистр, двунаправленный приемопередатчик, входной и выходной регистры, блок управления с соответствующими связями.
В устройстве задается число n периодов исследуемой последовательности импульсов, определяется число N импульсов счетной частоты Fсч, поступающих на счетчик 2 за интервал времени tx, равный сумме длительностей этих n периодов. Затем полученное число N считывается внешней микропроцессорной системой, в которой производится вычисление частоты по формуле 
Первым существенным недостатком устройства-аналога является то, что оно имеет весьма ограниченный диапазон измерения частоты. Причем верхний предел Fxmax этого диапазона определяется

Зависимость (1) выводится следующим образом. В измеряемом интервале времени tx укладываются N периодов Тсч счетной частоты Fсч или n периодов Tx измеряемой частоты Fx, то есть tх=N·Tсч=n·Tx. Погрешность δд дискретности измерения определяется:
Из последнего уравнения получаем N=1/δд. Подставляя значение N в уравнение, определяющее tx, имеем
Fx=n·δД·Fсч
При определении нижнего предела Fxmin измерения частоты исходим из того, что при понижении частоты Fx количество счетных импульсов Fсч, поступающих на 16-разрядный счетчик 2, не должно превышать емкости этого счетчика Сст=216-1=65535. Из последнего следует условие: n·Тxmax≤Сст·Тсч, откуда после несложных преобразований получаем формулу для определения нижнего предела Fxmin измерения частоты
Таким образом, устройство-аналог измеряет частоту в пределах
Например, при n=4, Fсч=106 Гц, δд=0,1% рассматриваемое устройство будет измерять частоту в пределах от 61 до 4000 Гц. Расширение этого диапазона требует перепрограммирования счетчиков, что сопряжено с недопустимо большими паузами в измерении частоты.
Вторым существенным недостатком рассматриваемого устройства является то, что оно не рассчитано на многократное непрерывное измерение частоты: в нем осуществляется однократное изменение, состоящее из цикла грубой оценки текущего значения частоты Fx и цикла точного измерения этого параметра.
Наиболее близким по технической сущности и достижимому положительному эффекту к заявленному устройству - прототипом - является цифровой частотомер [4], включающий в себя формирователь исследуемой последовательности импульсов (порт приема входных сигналов), генератор образцовой частоты Fо, элемент НЕ, микропроцессорную систему (средство обработки и индикации), первые счетчик и регистр, вторые счетчик и регистр, две схемы синхронизации, порт приема импульса цикла измерения и их связи.
В устройстве посредством первого и второго счетчиков осуществляется непрерывный счет соответственно импульсов n исследуемой последовательности Fx и N счетных импульсов Fсч=Fо, определяются числа импульсов Δnц=n(i+1)-n(i) и ΔNц=N(i+1)-N(i), поступающих на счетчики за время Тц цикла измерения, и вычисляется частота по формуле: 
Первым существенным недостатком устройства-прототипа является ограниченный диапазон измерения частоты.
При этом верхний предел Fxmax этого диапазона определяется зависимостью Fxmax<0,5·Fсч, что следует из принципа работы используемых в рассматриваемом устройстве схем синхронизации: для устойчивой работы схемы синхронизации при измерении максимального значения Fxmax частоты преобразуемые сигналы Fx должны представлять собой меандр и для фиксации уровней этого меандра по фронту счетных импульсов Fсч необходимо, чтобы в течение каждого импульса и каждой паузы меандра на схему сигнализации поступал хотя бы один счетный импульс Fсч. А это равнозначно требованию Fсч>2·Fxmax или Fxmax<0,5·Fсч.
Нижний предел Fxmin диапазона измерения частоты этого устройства определяется по следующей формуле, полученной по методике вывода зависимости (1):
Например, при Fсч=106 Гц, Тц=0,01 с, δд=0,1% будем иметь:
Fxmin≥100 кГц, Fxmax<500 кГц
Вторым существенным недостатком рассматриваемого устройства является его низкая надежность измерения частоты, обусловленная асинхронностью процессов записи чисел n и N соответственно в первый и второй регистры и процесса считывания записанной информации микропроцессорной системой для вычисления значения частоты: случайное совпадение по времени этих процессов может привести к искажению значений чисел n, N и вследствие этого к сбою в измерении частоты.
Третьим существенным недостатком этого устройства является сложность его программной и аппаратурной реализации, поскольку, во-первых, использованный в этом устройстве непрерывный параллельный счет импульсов n и N требует дополнительных вычислительных операций, восстанавливающих истинное значение чисел в случае переполнения счетчиков. Во-вторых, для осуществления измерения частоты импульсов Fx в несколько расширенном диапазоне рассматриваемое устройство должно быть снабжено дополнительными функциональными блоками, в том числе аналоговыми, что неоправданно усложняет это устройство.
Кроме того, такое усложненное устройство также имеет существенное ограничение диапазона измерения частоты, так как в этом случае к минимальному значению измеряемой частоты Fx предъявляется требование, чтобы в течение цикла Тц измерения было по крайней мере два-три целых периода измеряемой частоты Fx, то есть в усложненном варианте устройства-прототипа нижний предел диапазона измерения частоты определится Fxmin>(2-3)/Тц.
При Тц=0,01 с будем иметь Fxmin>(200-300) Гц.
Задачей предлагаемого способа измерения частоты и устройства для его осуществления является расширение диапазона и повышение надежности измерения частоты.
Поставленная задача достигается тем, что в способе измерения частоты, заключающемся в преобразовании исследуемых сигналов частоты Fx в исследуемую последовательность импульсов той же частоты Fx, в осуществлении одновременного счета n импульсов исследуемой последовательности импульсов и N счетных импульсов частоты Fсч, в определении значения частоты исследуемых сигналов по формуле  в отличие от прототипа создают последовательность импульсов образцовой частоты F0, из которой формируют счетные импульсы с частотой Fсч, определяемой требованием по точности измерения, причем фронт каждого такого импульса формируют на срезе соответствующего импульса образцовой частоты, а также формируют первую последовательность импульсов с периодом следования Δt1, определяемым требованием по быстродействию измерения, одновременно формируют вторую последовательность импульсов с периодом следования Δt2, фронт каждого импульса которой соответствует фронту импульса исследуемой последовательности импульсов, появившегося сразу после фронта соответствующего импульса первой последовательности импульсов, после фронта каждого импульса второй последовательности импульсов и окончания действующего во время этого фронта импульса образцовой частоты или окончания возникшего после этого же фронта импульса образцовой частоты на фронте очередного импульса образцовой частоты начинают выполнять с тактом Ti, равным периоду Т0 следования импульсов образцовой частоты, тактируемую последовательность операций, причем на первом такте Т1 запрещают счет n импульсов исследуемой последовательности импульсов и N счетных импульсов, на втором такте Т2 фиксируют значения чисел n и N, полученные в результате предыдущего счета соответственно импульсов исследуемой последовательности импульсов и счетных импульсов, на третьем такте Т3 формируют сигнал RDY готовности зафиксированных значений чисел n, N и осуществляют подготовку нового счета, обеспечивающую со следующего такта счет N импульсов исследуемой последовательности и n счетных импульсов, начиная со значения, равного 0, на четвертом такте Т4 начинают новый одновременный счет n импульсов исследуемой последовательности и N счетных импульсов, а определение частоты Fx исследуемых сигналов осуществляют по сигналу RDY готовности зафиксированных значений чисел n и N или в любое время в течение нового одновременного счета n импульсов исследуемой последовательности и N счетных импульсов, причем перед началом определения частоты Fx к зафиксированному значению числа N прибавляют число ΔN, равное числу периодов следования счетных импульсов, укладывающихся в интервале времени, определяемом суммой длительностей трех тактов, в течение которых действует запрет счета импульсов.
в отличие от прототипа создают последовательность импульсов образцовой частоты F0, из которой формируют счетные импульсы с частотой Fсч, определяемой требованием по точности измерения, причем фронт каждого такого импульса формируют на срезе соответствующего импульса образцовой частоты, а также формируют первую последовательность импульсов с периодом следования Δt1, определяемым требованием по быстродействию измерения, одновременно формируют вторую последовательность импульсов с периодом следования Δt2, фронт каждого импульса которой соответствует фронту импульса исследуемой последовательности импульсов, появившегося сразу после фронта соответствующего импульса первой последовательности импульсов, после фронта каждого импульса второй последовательности импульсов и окончания действующего во время этого фронта импульса образцовой частоты или окончания возникшего после этого же фронта импульса образцовой частоты на фронте очередного импульса образцовой частоты начинают выполнять с тактом Ti, равным периоду Т0 следования импульсов образцовой частоты, тактируемую последовательность операций, причем на первом такте Т1 запрещают счет n импульсов исследуемой последовательности импульсов и N счетных импульсов, на втором такте Т2 фиксируют значения чисел n и N, полученные в результате предыдущего счета соответственно импульсов исследуемой последовательности импульсов и счетных импульсов, на третьем такте Т3 формируют сигнал RDY готовности зафиксированных значений чисел n, N и осуществляют подготовку нового счета, обеспечивающую со следующего такта счет N импульсов исследуемой последовательности и n счетных импульсов, начиная со значения, равного 0, на четвертом такте Т4 начинают новый одновременный счет n импульсов исследуемой последовательности и N счетных импульсов, а определение частоты Fx исследуемых сигналов осуществляют по сигналу RDY готовности зафиксированных значений чисел n и N или в любое время в течение нового одновременного счета n импульсов исследуемой последовательности и N счетных импульсов, причем перед началом определения частоты Fx к зафиксированному значению числа N прибавляют число ΔN, равное числу периодов следования счетных импульсов, укладывающихся в интервале времени, определяемом суммой длительностей трех тактов, в течение которых действует запрет счета импульсов.
Поставленная задача достигается тем, что в устройство для измерения частоты, содержащее формирователь исследуемой последовательности импульсов, генератор образцовой частоты, элемент НЕ, первые счетчик и регистр, вторые счетчик и регистр, а также микропроцессорную систему, причем вход формирователя исследуемой последовательности импульсов соединен с сигнальным входом устройства, выход генератора образцовой частоты соединен с входом элемента НЕ, выход данных первого счетчика соединен шиной с входом данных первого регистра, выход данных второго счетчика соединен шиной с входом данных второго регистра, тактовый вход которого подключен к тактовому входу первого регистра, в отличие от прототипа введены формирователь импульсов запуска, элемент ИЛИ, блок синхронизации, блок управления, формирователь счетных импульсов и мультиплексор, причем выход формирователя исследуемой последовательности импульсов соединен с первым входом блока синхронизации и с тактовым входом первого счетчика, выход генератора образцовой частоты соединен с тактовым входом формирователя импульсов запуска и первым входом блока управления, выход элемента НЕ соединен с вторым входом блока управления и тактовым входом формирователя счетных импульсов, шина начальной установки формирователя импульсов запуска соединена с входом данных этого формирователя, а его выход - с первым входом элемента ИЛИ, второй вход которого подключен к входу внешнего запуска устройства, а выход элемента ИЛИ - к второму входу блока синхронизации, выход которого подключен к третьему входу блока управления, первый выход блока управления соединен с разрешающими входами первого и второго счетчиков, второй выход - с тактовым входом первого регистра, третий выход - с входами обнуления первого и второго счетчиков и с входом прерывания микропроцессорной системы, четвертый выход блока управления соединен с третьим входом блока синхронизации, шина начальной установки формирователя счетных импульсов соединена с входом данных этого формирователя, а его выход подключен к тактовому входу второго счетчика, выходы данных первого и второго регистров соединены шинами соответственно с первым и вторым входами данных мультиплексора, третий вход которого подключен шиной к выходу адреса микропроцессорной системы, выход считывания которой соединен с четвертым входом мультиплексора, выход данных мультиплексора соединен шиной через микропроцессорную систему с выходом данных устройства.
Сопоставительный анализ заявленного технического решения с прототипом способа показывает, что оно отличается от известного тем, что в нем:
- создают последовательность импульсов образцовой частоты F0, из которой формируют счетные импульсы с частотой Fсч, определяемой требованием по точности измерения, причем фронт каждого такого импульса формируют на срезе соответствующего импульса образцовой частоты;
- формируют первую последовательность импульсов с периодом следования Δt1, определяемым требованием по быстродействию измерения;
- одновременно формируют вторую последовательность импульсов с периодом следования Δt2, фронт каждого импульса которой соответствует фронту импульса исследуемой последовательности импульсов, появившегося сразу после фронта соответствующего импульса первой последовательности импульсов;
- после фронта каждого импульса второй последовательности импульсов и окончания действующего во время этого фронта импульса образцовой частоты или окончания возникшего после этого же фронта импульса образцовой частоты на фронте очередного импульса образцовой частоты начинают выполнять с тактом Ti, равным периоду Т0 следования импульсов образцовой частоты, тактируемую последовательность операций, причем на первом такте Т1 запрещают счет n импульсов исследуемой последовательности импульсов и N счетных импульсов, на втором такте Т2 фиксируют значения чисел n и N, полученные в результате предыдущего счета соответственно импульсов исследуемой последовательности импульсов и счетных импульсов, на третьем такте Т3 формируют сигнал RDY готовности зафиксированных значений чисел n, N и осуществляют подготовку нового счета, обеспечивающую со следующего такта счет n импульсов исследуемой последовательности и N счетных импульсов, начиная со значения, равного 0, на четвертом такте Т4 начинают новый одновременный счет n импульсов исследуемой последовательности и N счетных импульсов, а определение частоты Fx исследуемых сигналов осуществляют по сигналу RDY готовности зафиксированных значений чисел n и N или в любое время в течение нового одновременного счета n импульсов исследуемой последовательности и N счетных импульсов, причем перед началом определения частоты Fx к зафиксированному значению числа N прибавляют число ΔN, равное числу периодов следования счетных импульсов, укладывающихся в интервале времени, определяемом суммой длительностей трех тактов, в течение которого действует запрет счета импульсов.
Сопоставительный анализ заявленного технического решения с прототипом устройства показывает, что оно отличается от известного тем, что в нем:
- введены формирователь импульсов запуска, элемент ИЛИ, блок синхронизации, блок управления, формирователь счетных импульсов и мультиплексор;
- выход формирователя исследуемой последовательности импульсов соединен с первым входом блока синхронизации и с тактовым входом первого счетчика, выход генератора образцовой частоты соединен с тактовым входом формирователя импульсов запуска и первым входом блока управления, выход элемента НЕ соединен с вторым входом блока управления и тактовым входом формирователя счетных импульсов, шина начальной установки формирователя импульсов запуска соединена с входом данных этого формирователя, а его выход - с первым входом элемента ИЛИ, второй вход которого подключен к входу внешнего запуска устройства, а выход элемента ИЛИ - к второму входу блока синхронизации, выход которого подключен к третьему входу блока управления, первый выход блока управления соединен с разрешающими входами первого и второго счетчиков, второй выход - с тактовым входом первого регистра, третий выход - с входами обнуления первого и второго счетчиков и с входом прерывания микропроцессорной системы, четвертый выход блока управления соединен с третьим входом блока синхронизации, шина начальной установки формирователя счетных импульсов соединена с входом данных этого формирователя, а его выход подключен к тактовому входу второго счетчика, выходы данных первого и второго регистров соединены шинами соответственно с первым и вторым входами данных мультиплексора, третий вход которого подключен шиной к выходу адреса микропроцессорной системы, выход считывания которой соединен с четвертым входом мультиплексора, выход данных мультиплексора соединен шиной через микропроцессорную систему с выходом данных устройства.
Перечисленные отличия предлагаемых способа измерения частоты и устройства для его осуществления позволяют сделать вывод о соответствии заявленных технических решений критерию «новизна». Признаки, по совокупности отличающие заявленные технические решения от прототипов способа и устройства, не выявлены в других технических решениях при изучении данной и смежных областей техники. Они позволяют получить новое качество и существенные отличия при измерении частоты: способность непрерывно измерять частоту в широком диапазоне с повышенной надежностью.
Суть способа-прототипа [2] и его недостатки поясняют фиг.1-4, а суть предлагаемых способа измерения частоты и устройства для его осуществления поясняют фиг.5-8, на которых представлены:
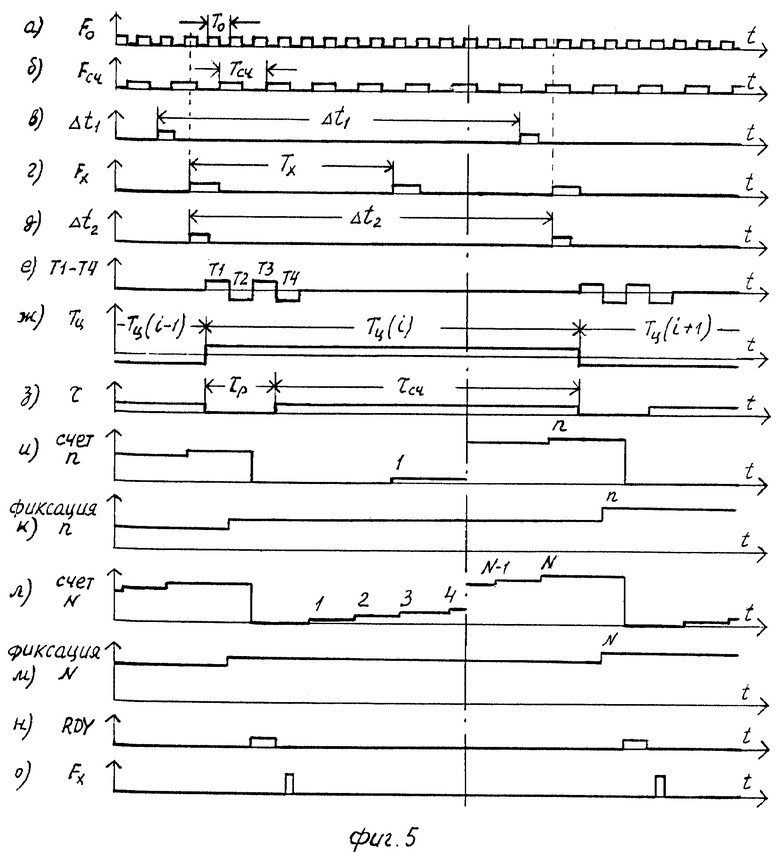
- фиг.5 - временные диаграммы, поясняющие предлагаемый способ измерения частоты;
- фиг.6 - блок-схема предлагаемого устройства;
- фиг.7 - временные диаграммы, поясняющие работу предлагаемого устройства;
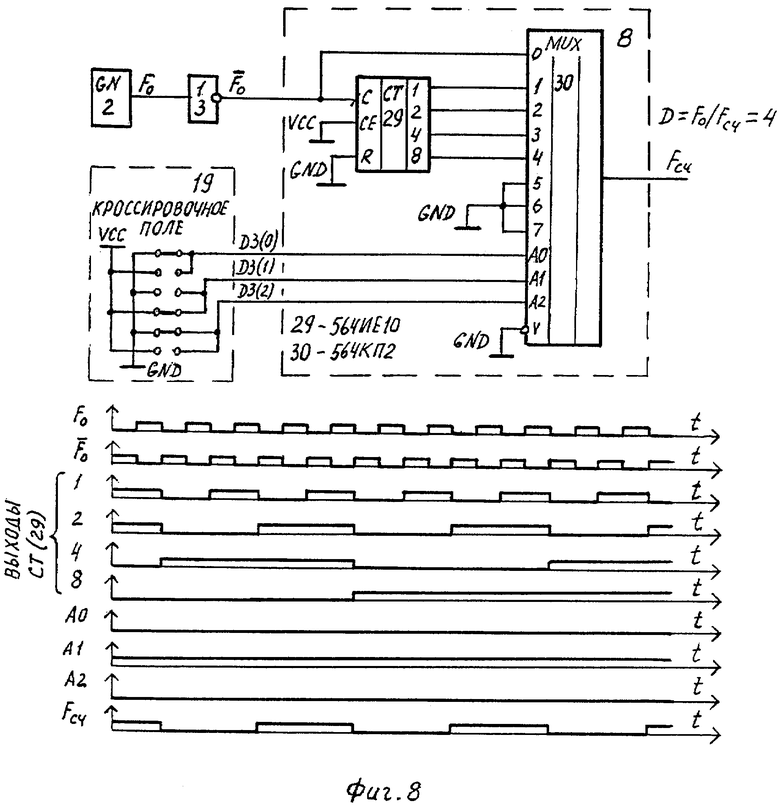
- фиг.8 - вариант схемы формирователя счетных импульсов, реализованный на счетчике и мультиплексоре;
В тексте описания и на фиг.5-8 приняты следующие обозначения и сокращения:
Fx - частота исследуемых сигналов, частота исследуемой последовательности импульсов, сокращенно - частота Fx;
Fxmin, Fxmax - соответственно нижний и верхний пределы диапазона измерения частоты - пределы Fxmin, Fxmax;
Тх - период частоты Fx, Тх=1/Fx - период Тх;
Txmin, Txmax - периоды Тх, соответствующие пределам диапазона измерения частоты: Txmin=1/Fmax, Txmax=1/Fxmin - периоды Txmin, Txmax;
Fo - образцовая частота - частота Fo;
То - период образцовой частоты, To=1/Fo - период То;
Fсч - частота счетных импульсов - частота Fсч;
Тсч - период счетных импульсов, Тсч=1/Fсч - период Тсч;
D - коэффициент деления частоты F0, D=F0/Fсч - коэффициент D;
Δt1 - период следования импульсов первой последовательности импульсов - период Δt1;
Δt2 - период следования импульсов второй последовательности импульсов - период Δt2;
Ti, где i=1-4 - такты, с которыми выполняется тактируемая последовательность операций;
n - число импульсов исследуемой последовательности импульсов - число n импульсов;
N - число счетных импульсов - число N импульсов;
RDY - сигнал готовности зафиксированных значений чисел n и N - сигнал готовности RDY;
ΔN - число, равное количеству периодов счетных импульсов, укладывающихся в интервале τр - число ΔN;
τи - длительность импульса исследуемой последовательности импульсов - длительность импульса τи;
Тц - длительность цикла измерения - интервал Тц;
τр - интервал времени реализации тактируемой последовательности операций, интервал времени запрета счета импульсов - интервал τр;
τсч - интервал времени счета импульсов n и N - интервал τсч;
Сст - емкость двоичного счетчика импульсов, Сст=2p-1 - емкость Сст;
Р - число разрядов двоичного счетчика - число Р;
δд - относительная погрешность дискретности измерения - погрешность δд.
Обозначения типа Fx(1), TR(20) или А(0)(28) - выходной сигнал соответственно формирователя 1, триггера 20, разряда А(0) шины адреса 28;
nCT(9), NCT(11), nRG(10), NRG(12) - числа, имеющиеся соответственно в счетчиках 9, 11 и регистрах 10 и 12;
MDO(27) - число, имеющееся на шине данных 27;
MFx(17) - значение частоты, вычисленное в микропроцессорной системе 17;
Tx<Δt1, Tx>Δt1 - соответственно Тх чуть меньше Δt1, Tx чуть больше Δt1.
В предлагаемом способе измерения частоты создают последовательность импульсов образцовой частоты Fo (фиг.5-а), из которой формируют счетные импульсы Fсч (фиг.5-б), причем фронт каждого такого импульса формируют на срезе соответствующего импульса образцовой частоты. Кроме того, формируют первую последовательность импульсов с периодом следования Δt1 (фиг.5-в). Одновременно формируют вторую последовательность импульсов с периодом следования Δt2 (фиг.5-д), фронт каждого импульса которой соответствует фронту импульса исследуемой последовательности Fx импульсов (фиг.5-г), появившегося сразу после фронта соответствующего импульса первой последовательности импульсов.
После фронта каждого импульса второй последовательности импульсов и окончания действующего во время этого фронта импульса образцовой частоты или окончания возникшего после этого же фронта импульса образцовой частоты на фронте очередного импульса образцовой частоты начинают выполнять (фиг.5-е) с тактом Ti, равным периоду То следования импульсов образцовой частоты, тактируемую последовательность операций. С целью компактного и наглядного представления временных диаграмм такты Т1-Т4, с которыми выполняется тактируемая последовательность операций, на фиг.5-е изображены на одной временной оси на двух чередующихся уровнях ординаты.
Измерение частоты производится непрерывно, цикл за циклом. На фиг.5-ж показаны соседние циклы Тц(i-1), Тц(1), Тц(i+1) измерения на разных чередующихся уровнях ординаты. Каждый цикл Тц измерения состоит (фиг.5-з) из интервала времени τр тактируемой последовательности операций и интервала времени τсч счета n и N импульсов.
Интервал τр равен суммарной длительности первых трех Т1-Т3 тактов реализации тактируемой последовательности операций. В течение этого интервала действует запрет счета n и N импульсов, осуществляются фиксация значений чисел n и N (на такте Т2, фиг.5-к,м) и подготовка последующего счета n и N импульсов (на такте Т3, фиг.5-и, л). Кроме того, в интервале τр на фронте третьего такта формируется сигнал готовности RDY (фиг.5-н).
В течение интервала τсч осуществляется счет чисел n (фиг.5-и) и N (фиг.5-л) импульсов, а определение частоты Fx исследуемых сигналов выполняется (фиг.5-о) по сигналу готовности RDY или в любое время в течение нового интервала τсч, причем перед началом определения частоты Fx к зафиксированному значению числа N прибавляют число ΔN.
В предлагаемом способе измерения частоты предусмотрено разделение во времени асинхронных процессов, случайное совпадение которых может привести к сбою в измерении. В частности, счет N импульсов частоты Fсч осуществляется на срезе импульсов частоты F0, а запрет или разрешение этого счета - на фронте этих импульсов.
Запрет счета импульсов начинается на первом такте Т1 тактируемой последовательности операций, который формируется после фронта импульса второй последовательности и окончания действующего во время этого фронта импульса частоты F0 или окончания возникшего после этого же фронта импульса частоты F0 на фронте очередного импульса частоты F0. Такая последовательность операций позволяет разделить во времени процессы счета n импульсов частоты Fx и запрета этого счета.
Формирование сигнала готовности RDY (на такте Т3) осуществляется после фиксации чисел n и N (на такте Т2), что исключает совпадение во времени процессов фиксации чисел n, N и определения частоты Fx.
В предлагаемом способе измерения частоты фронт каждого импульса второй последовательности Δt2 соответствует фронту импульса исследуемой последовательности Fx. Поэтому в периоде Δt2, равном с погрешностью ±Т0 длительности Тц цикла измерения, всегда укладывается целое число периодов Тх, что исключает погрешность дискретности счета n импульсов.
При определении верхнего предела Fxmax диапазона измерения частоты по предлагаемому способу исходим из следующего. Фронт импульса второй последовательности соответствует фронту импульса исследуемой последовательности Fx, а следующий за этим импульсом очередной импульс Fx для того, чтобы он был учтен, должен поступать после окончания интервала τр, в течение которого существует запрет счета и который равен суммарной длительности трех периодов образцовой частоты.
Из отмеченного следует условие, определяющее значение верхнего предела Fxmax диапазона измерения частоты: Txmin>3·To.
Учитывая, что Fxmax=1/Txmin, из последнего неравенства получаем зависимость для определения верхнего предела измерения частоты:
При значениях частоты Fx исследуемых сигналов, меньших величины частоты сигналов первой последовательности импульсов, то есть при Tx>Δt1, в предлагаемом способе процесс измерения не прекращается, как это имеет место в способе-прототипе, а продолжается до тех пор, пока импульсы частоты Fсч не заполнят емкость соответствующего счетчика.
При этом нижний предел Fxmin измерения частоты по предлагаемому способу определится из следующих соотношений:

Из последнего равенства получаем формулу для определения нижнего предела измерения частоты:

Таким образом, в соответствии с (2) и (3) предлагаемый способ позволяет измерять частоту в пределах:
Например, при Fo=106 Гц, D=4, p=16 диапазон измерения частоты определится следующим образом:
 3,8 Гц≤Fx<333,3 кГц
3,8 Гц≤Fx<333,3 кГц
Значение длительности периода Δt1 следования импульсов первой последовательности определяется требованиями по быстродействию измерения, которые в свою очередь зависят от динамики процессов исследуемых объектов или длительности цикла Тр работы многоканальной системы измерения, в которую могут входить устройства, реализованные на основе предлагаемого способа измерения частоты.
Поэтому требуемое значение периода Δt1 всегда определяется внешними факторами, не зависящими от способа и устройства измерения частоты, и для большинства систем измерения находится в пределах от 0,01 до 1 с.
В состав предлагаемого устройства (фиг.6) входят формирователь 1 исследуемой последовательности импульсов, генератор 2 образцовой частоты, элемент 3 НЕ, формирователь 4 импульсов запуска, элемент 5 ИЛИ, блок 6 синхронизации, блок 7 управления, формирователь 8 счетных импульсов, первые счетчик 9 и регистр 10, вторые счетчик 11 и регистр 12, мультиплексор 13, микропроцессорная система 14, причем вход формирователя 1 исследуемой последовательности импульсов соединен с сигнальным входом 15 устройства, выход генератора 2 образцовой частоты соединен с входом элемента 3 НЕ, выход данных первого счетчика 9 соединен шиной с входом данных первого регистра 10, выход данных второго счетчика 11 соединен шиной с входом данных второго регистра 12, выход формирователя 1 исследуемой последовательности импульсов соединен с первым входом блока 6 синхронизации и с тактовым входом первого счетчика 9, выход генератора 2 образцовой частоты соединен с тактовым входом формирователя 4 импульсов запуска и первым входом блока 7 управления, выход элемента 3 НЕ соединен с вторым входом блока 7 управления и тактовым входом формирователя 8 счетных импульсов, шина 18 начальной установки формирователя 4 импульсов запуска соединена с входом данных этого формирователя, а его выход - с первым входом элемента 5 ИЛИ, второй вход которого подключен к входу 16 внешнего запуска устройства, а выход элемента 5 ИЛИ - к второму входу блока 6 синхронизации, выход которого подключен к третьему входу блока 7 управления, первый выход блока 7 управления соединен с разрешающими входами первого 9 и второго 11 счетчиков, второй выход - с тактовыми входами первого 10 и второго 12 регистров, третий выход - с входами обнуления первого 9 и второго 11 счетчиков и с входом прерывания микропроцессорной системы 14, четвертый выход блока 7 управления соединен с третьим входом блока 6 синхронизации, шина 19 начальной установки формирователя 8 счетных импульсов соединена с входом данных этого формирователя, а его выход подключен к тактовому входу второго счетчика 11, выходы данных первого 10 и второго 12 регистров соединены шинами соответственно с первым и вторым входами данных мультиплексора 13, третий вход которого подключен шиной к выходу адреса микропроцессорной системы 14, выход считывания которой соединен с четвертым входом мультиплексора 13, выход данных мультиплексора 13 соединен шиной через микропроцессорную систему 14 с выходом данных 17 устройства.
Предлагаемое устройство для измерения частоты работает следующим образом (фиг.7).
Формирователь 1 из исследуемых сигналов, поступающих на сигнальный вход 15 устройства, непрерывно вырабатывает исследуемую последовательность Fx(1) импульсов. Генератор 2 образцовой частоты непрерывно вырабатывает импульсы частоты Fo(2), из которых также непрерывно в формирователе 4 путем деления вырабатываются импульсы с периодом следования Δt1, а в формирователе 8 посредством деления или инвертирования - импульсы счетной частоты Fсч(8).
Импульсы с выхода формирователя 4 поступают на первый вход элемента 5 ИЛИ. Аналогичные импульсы могут быть поданы на вход 16 устройства от внешнего блока или микропроцессорной системы 14, а с входа 16 - на второй вход элемента 5 ИЛИ (внешний блок и связи микропроцессорной системы 14 с входом 16 на фиг.6 не показаны).
На входы элемента 5 ИЛИ должна поступать только одна последовательность импульсов: либо с выхода формирователя 4, либо с входа 16 устройства (элементы переключения последовательностей импульсов на фиг.6 не показаны). В обоих случаях элемент 5 ИЛИ вырабатывает запускающие импульсы Δt1 (5), представляющие собой первую последовательность импульсов.
Блок 6 синхронизации формирует вторую последовательность импульсов Δt2(21,6), фронт каждого импульса которой соответствует фронту импульса последовательности Fx(1), появившегося сразу после фронта соответствующего импульса Δt1(5) первой последовательности импульсов.
Блок 7 управления вырабатывает на фронте импульсов Fo управляющие сигналы Т1-Т4(23), по которым осуществляется тактируемая последовательность операций и формируется запрет счета n и N импульсов на время τр выполнения этих операций.
Цикл Тц измерения устройства, как и предложенного способа измерения частоты (фиг.5-ж, з), состоит из интервала τр времени реализации тактируемой последовательности операций и интервала τсч времени счета импульсов n и N (фиг.7).
В интервале τсч D-триггеры 20, 21, 22, 24, 25 и счетчик-дешифратор 23 находятся в исходном состоянии. При этом на прямых выходах триггеров 20, 24 и на выходах Т1-Т4 счетчика-дешифратора 23 имеется сигнал логического «0», а на инверсных выходах триггеров 21, 22 и 25 - сигнал логической «1».
Импульсы Fx(1) формирователя 1 поступают на тактовые входы триггера 21 и счетчика 9. При этом триггер 21 не изменяет своего исходного состояния, поскольку на его D-вход подается сигнал логического «0». На входы СЕ счетчиков 9 и 11 подается с инверсного выхода триггера 25 разрешающий сигнал логической «1» и оба счетчика одновременно выполняют счет импульсов: счетчик 9 считает nCT(9) импульсы последовательности Fx(1), а счетчик 11 - NCT(11) счетные импульсы Fсч(8).
Импульсы Fo(2) генератора 2 образцовой частоты, поступающие на тактовый вход счетчика-дешифратора 23 и через инвертор 3 на тактовый вход триггера 22, исходного состояния этих элементов не изменяют, так как на их R-входах имеется запрещающий сигнал логической «1».
Счет nCT(9) и NCT(11) импульсов в счетчиках 9 и 11 продолжается в течение всего интервала τсч.
С приходом импульса запуска Δt1(5) происходит включение триггера 20, на прямом входе которого появляется сигнал логической "1", подаваемый на D-вход триггера 21. Поступающий после этого на тактовый вход триггера 21 первый импульс последовательности Fx(1) включает триггер 21 и на его инверсном выходе появляется сигнал логического «0».
На фронте очередного инвертированного импульса образцовой частоты  , происходит включение триггера 22, на инверсном выходе которого появляется сигнал логического «0», разрешающий работу счетчика-дешифратора 23.
, происходит включение триггера 22, на инверсном выходе которого появляется сигнал логического «0», разрешающий работу счетчика-дешифратора 23.
С поступлением на тактовый вход счетчика-дешифратора 23 очередного импульса частоты Fo(2) заканчивается интервал τсч времени счета импульсов nCT(9), NCT(11) и начинается интервал τр времени реализации тактируемой последовательности операций.
При этом на фронте четырех следующих друг за другом импульсов частоты Fo(2) счетчик-дешифратор 23 формирует на своих выходах управляющие импульсы Т1-Т4(23). Причем первый импульс Т1(23) включает триггер 25 и сигнал логического «0» с его инверсного выхода поступает на СЕ-входы счетчиков 9, 10 и запрещает счет импульсов в этих счетчиках. Второй импульс Т2(23) подается на тактовые входы регистров 10 и 12, в которые по этому импульсу производится запись чисел nCT(9) и NCT(11), накопленных в счетчиках 9 и 11. Третий импульс Т3(23) обнуляет счетчики 9 и 11, подготавливая эти счетчики к новому счету n и N импульсов. Кроме того, импульс Т3(23) в виде сигнала готовности RDY/T3(23) подается на вход INT микропроцессорной системы 14.
Четвертый импульс Т4(23) устанавливает триггер 25 в исходное состояние, при этом сигнал логической «1» с его инверсного выхода в качестве разрешающего сигнала подается на СЕ-входы счетчиков 9, 11, и они начинают счет n и N импульсов. При этом начинается новый интервал τсч времени счета импульсов.
Одновременно четвертый импульс Т4(23) подается на D-вход триггера 24. С приходом на тактовый вход этого триггера очередного инвертированного импульса образцовой частоты происходит включение триггера 24 и на его прямом выходе появляется сигнал логической «1», который поступает на R-входы триггеров 20, 21 и устанавливает их в исходное состояние.
Сигнал логической «1» с инверсного выхода триггера 21 устанавливает в исходное состояние триггер 22, выходной сигнал которого в свою очередь устанавливает в исходное состояние счетчик-дешифратор 23. При этом на D-входе триггера 24 появляется сигнал логического «0» и очередной инвертированный импульс образцовой частоты устанавливает этот триггер в исходное состояние, снимая при этом запрещающий сигнал логической «1» с R-входов триггеров 20 и 21.
С приходом нового запускающего импульса Δt1(5) последовательно включаются триггеры 20, 21, 22 и затем в предлагаемом устройстве начинается новый цикл Тц измерения.
В предлагаемом устройстве определение частоты исследуемых сигналов Fx может осуществляется по сигналу RDY/T3(23) готовности зафиксированных в регистрах 10 и 12 значений чисел n и N или в любое время в течение интервала τсч времени нового счета n и N импульсов.
При этом микропроцессорная система 14 по шине адреса 28 поочередно выдает в мультиплексор 13 коды А(0-2)(28) адреса регистров 10 и 12. Мультиплексор 13 в соответствии с полученным кодом адреса подключает выходную шину данных первого 10 или второго 12 регистра к шине данных 27 микропроцессорной системы 14. После установки адреса микропроцессорная система 14 выдает в мультиплексор 13 импульс считывания RD(14), по которому данные MDO(27) с выбранного регистра поступают в микропроцессорную систему 14, где сначала производится корректировка числа счетных импульсов N=NRG(12)+ΔN, а затем вычисляется частота исследуемых сигналов по формуле: 
На основе предлагаемого способа измерения частоты и устройства для его осуществления могут быть построены многоканальные системы измерения частоты, в которых общей может быть микропроцессорная система 14, принимающая и обрабатывающая информацию от нескольких пар регистров. В частности, микропроцессорная система устройства, представленного на фиг.6, имеет 8 адресов А(0-2), то есть рассчитана на прием и обработку информации о четырех исследуемых сигналах.
Предлагаемое устройство для измерения частоты может быть выполнено на серийно выпускаемых интегральных микросхемах. Так, например, формирователь 1 может быть реализован на компараторе 521САЗ бКО.347.015ТУ2, генератор 2 - на кварцевом генераторе ГК56-ПАФТП.433520.004ТУ, формирователи 4 и 8 - на программируемом счетчике 564ИЕ15 бКО.347.064ТУ или на счетчике 564ИЕ10 и мультиплексоре 564КП2 (фиг.8), счетчик-дешифратор 23 - на счетчике 564ИЕ9, мультиплексор 13 - на мультиплексоре 564КП1 или 564КП2. В качестве счетчиков 9, 11 и регистров 10, 12 могут быть использованы счетчики 564ИЕ10 и регистры 564ИР6, в качестве микропроцессора 26 - один из выпускаемых промышленностью микропроцессоров или микроЭВМ, например Н1830ВЕ51 АЕЯР.431280.070ТУ. Реализация остальных элементов блок-схемы фиг.6 не вызывает затруднений. При необходимости вместо микросхем серии 564 могут быть использованы аналогичные элементы одной из более высокочастотных серий, например 1554 АЕЯР.431200.093 ТУ.
Возможны также варианты реализации предлагаемого устройства для измерения частоты на микросхеме одного из базовых матричных кристаллов, например на Н1537ХМ1 бКО.347.715ТУ или на программируемой логической интегральной схеме (ПЛИС), например, на ПЛИС серии Spartan-II XC2S100 фирмы «XILINX» и конфигурационном постоянном запоминающем устройстве ХС1700 этой же фирмы.
Предлагаемый способ измерения частоты и устройство для его осуществления позволяют реализовать быстродействующее высокоточное непрерывное измерение частоты сигналов в ее широком диапазоне, при этом полностью исключается возможность случайных сбоев в процессе измерения.
Выполненные по этому способу устройства в виде модулей могут быть включены в состав систем измерения, контроля и аварийной защиты различных объектов повышенного быстродействия, таких, например, как газотурбинные авиационные двигатели [5].
Высокая достоверность результата каждого измерения позволяет реализовать быстродействующую защиту исследуемых объектов, что особенно важно в период отработки этих объектов. При этом своевременное обнаружение «аварийной» ситуации и формирование управляющих команд позволит защитить от разрушения исследуемые объекты и испытательные стенды, что существенно снизит затраты на создание изделий новой техники.
ЛИТЕРАТУРА
1. Патент RU №2173857, МПК7 G01R 23/00, опубл. 20.09.2001.
2. Г.Я.Мирский Электронные измерения, М., «Радио и связь», 1986 г., с.129, 130, рис.4.21.
3. Патент RU №2018173, 5 G04F 10/04, G01R 23/00, опубл. 15.08.1994.
4. Патент RU №2210785, МПК7 G01R 23/10, опубл. 20.08.2003.
5. Н.Н.Севрюгин, И.А.Потапов, А.Н.Попов, А.М.Цирихов. Опыт автоматизации процесса испытаний авиационных газотурбинных двигателей || Приборы и Системы. Управление, контроль, диагностика. 2001. №5.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2402025C2 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352057C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2353052C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352059C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2010 |
|
RU2439791C1 |
| Устройство для измерения частоты и периода гармонического сигнала | 1991 |
|
SU1797714A3 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРИОДА В КОД | 2000 |
|
RU2178908C1 |
| ПРЕЦИЗИОННЫЙ ЦИФРОВОЙ ЧАСТОТОМЕР | 2018 |
|
RU2679930C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2007 |
|
RU2352058C1 |
| ИЗМЕРИТЕЛЬ ЧАСТОТЫ | 1989 |
|
RU2018173C1 |


Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, регулирования и аварийной защиты, в которых исходная информация, подлежащая анализу, представлена в частотной форме. Задачей предлагаемого способа измерения частоты и устройства для его осуществления является расширение диапазона и повышение надежности измерения частоты. Предложенное устройство для измерения частоты содержит формирователь исследуемой последовательности импульсов, генератор образцовой частоты, элемент НЕ, первые счетчик и регистр, вторые счетчик и регистр, микропроцессорную систему, формирователь импульсов запуска, элемент ИЛИ, блок синхронизации, блок управления, формирователь счетных импульсов и мультиплексор, соответствующим образом соединенные между собой. Данное устройство реализует соответствующий способ измерения частоты. 2 н.п. ф-лы, 8 ил.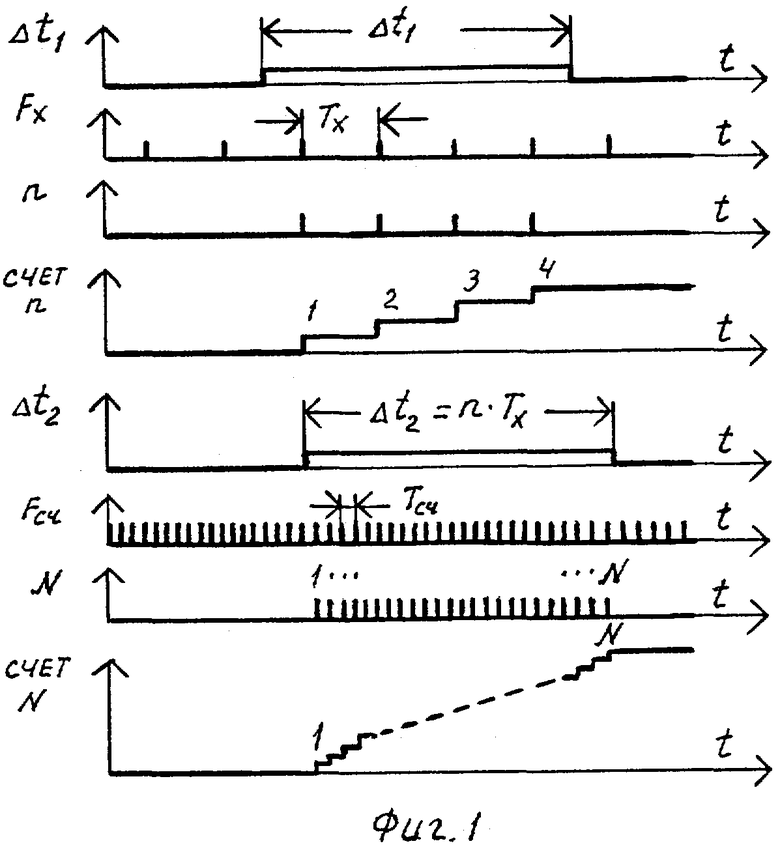

отличающийся тем, что создают последовательность импульсов образцовой частоты Fo, из которой формируют счетные импульсы с частотой Fсч, определяемой требованием по точности измерения, причем фронт каждого такого импульса формируют на срезе соответствующего импульса образцовой частоты, а также формируют первую последовательность импульсов с периодом следования Δt1, определяемым требованием по быстродействию измерения, одновременно формируют вторую последовательность импульсов с периодом следования Δt2, фронт каждого импульса которой соответствует фронту импульса исследуемой последовательности импульсов, появившегося сразу после фронта соответствующего импульса первой последовательности импульсов, после фронта каждого импульса второй последовательности импульсов и окончания действующего во время этого фронта импульса образцовой частоты или окончания возникшего после этого же фронта импульса образцовой частоты на фронте очередного импульса образцовой частоты начинают выполнять с тактом Ti, равным периоду То следования импульсов образцовой частоты, тактируемую последовательность операций, причем на первом такте Т1 запрещают счет n импульсов исследуемой последовательности импульсов и N счетных импульсов, на втором такте Т2 фиксируют значения чисел n и N, полученные в результате предыдущего счета соответственно импульсов исследуемой последовательности импульсов и счетных импульсов, на третьем такте Т3 формируют сигнал RDY готовности зафиксированных значений чисел n, N и осуществляют подготовку нового счета, обеспечивающую со следующего такта счет n импульсов исследуемой последовательности и N счетных импульсов, начиная со значения, равного 0, на четвертом такте Т4 начинают новый одновременный счет n импульсов исследуемой последовательности и N счетных импульсов, а определение частоты Fx исследуемых сигналов осуществляют по сигналу RDY готовности зафиксированных значений чисел n и N или в любое время в течение нового одновременного счета n импульсов исследуемой последовательности и N счетных импульсов, причем перед началом определения частоты Fx к зафиксированному значению числа N прибавляют число ΔN, равное числу периодов следования счетных импульсов, укладывающихся в интервале времени, определяемом суммой длительностей трех тактов, в течение которых действует запрет счета импульсов.
| ЦИФРОВОЙ ЧАСТОТОМЕР | 2001 |
|
RU2210785C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2003 |
|
RU2240565C1 |
| RU 2003108 C1, 15.11.1993 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ВРАЩЕНИЯ | 2002 |
|
RU2224259C2 |
| ИЗМЕРИТЕЛЬ ЧАСТОТЫ ВРАЩЕНИЯ ВАЛА | 1993 |
|
RU2084899C1 |
| Устройство для цифрового измерения частоты | 1989 |
|
SU1666965A2 |
| Измеритель частоты вращения вала | 1988 |
|
SU1583845A1 |
| US 6864672 А, 08.03.2005 | |||
| DE 3727636 A1, 21.04.1988 | |||
| US 5235287 А, 10.08.1993. | |||

