Изобретение относится к деталям машин и может быть использовано в составе изделий авиационной и ракетной техники.
Известен волновой привод, содержащий корпус с крышкой, установленные в нем волновую передачу с неподвижным гибким колесом и жестким колесом, размещенным на валу привода, плату с по меньшей мере одним электродвигателем, вал которого через редуктор связан с генератором волн волновой передачи, установленным на валу привода на подшипниках [1]. Недостатком такого волнового привода является значительные габариты и масса, что обусловлено наличием корпуса в виде цилиндра большого диаметра с двумя дисками.
Этого недостатка частично лишен волновой привод, содержащий корпус с втулкой, установленный в ней на двух подшипниках выходной вал, связанный с гибким колесом волновой передачи с неподвижным жестким колесом, размещенным на корпусе, генератор волн и плату с n (n=1, 2 и т.д.) электродвигателями, размещенными внутри гибкого колеса, при этом генератор волн установлен на корпусе и снабжен зубчатым венцом, входящим в зацепление с зубчатыми колесами электродвигателей, выбранный в качестве прототипа [2].
Недостатком такого волнового привода является значительные радиальные габариты и масса, что обусловлено большим диаметром гибкого колеса, вызванным необходимостью размещения внутри него выходного вала и электродвигателей, так что диаметр гибкого колеса выбирается не из прочностных, а из геометрических соображений, и имеет значительный запас по передаваемому моменту. Увеличение диаметра гибкого колеса ведет, в свою очередь, к увеличению его длины, исходя из принятых соотношений диаметра и длины гибкого колеса, и увеличению диаметра корпуса, что приводит к увеличению радиальных и осевых габаритов и массы привода. В условиях авиационной и особенно ракетной техники наличие избыточной массы и габаритов крайне нежелательно, что объясняется малыми располагаемыми для размещения агрегатов объемами и высокой удельной стоимостью вывода груза на орбиту.
Техническим результатом, достигаемым с помощью заявленного изобретения, является снижение радиальных габаритов без увеличения осевых габаритов и снижение массы.
Этот результат достигается за счет того, что в известном волновом приводе, содержащем корпус с втулкой, установленный в ней на двух подшипниках выходной вал, связанный с гибким колесом волновой передачи с неподвижным жестким колесом, размещенным на корпусе, генератор волн и плату с n (n=1, 2 и т.д.) электродвигателями, размещенными внутри гибкого колеса, при этом генератор волн установлен на корпусе и снабжен зубчатым венцом, входящим в зацепление с зубчатыми колесами электродвигателей, согласно изобретению плата выполнена в виде стакана, присоединенного дном к одному из торцев выходного вала и снабженного узлом фиксации к гибкому колесу, выполненному в виде тонкостенного кольца, а электродвигатели установлены внутри стакана на его дне, при этом на стенке стакана выполнены n пазов для размещения фланцев электродвигателей. Совокупность всех указанных существенных признаков позволяет уменьшить диаметры и длины гибкого колеса. Все это приводит к существенному снижению массы и радиальных габаритов без увеличения осевых габаритов.
На чертеже приведен пример конкретного выполнения волнового привода, продольный разрез.
Волновой привод содержит корпус 1 с втулкой 2, установленный в ней на двух подшипниках 3 выходной вал 4, связанный с гибким колесом 5 волновой передачи 6 с неподвижным жестким колесом 7, размещенным на корпусе 1. На корпусе 1 на подшипнике 8 установлен генератор волн 9, снабженный зубчатым венцом 10. Волновой привод содержит также плату 11 с n (n=1, 2 и т.д.) электродвигателями 12, размещенными внутри гибкого колеса 5. На валах электродвигателей 12 установлены зубчатые колеса 13. Зубчатый венец 10 входит в зацепление с зубчатыми колесами 13 электродвигателей 12. Плата 11 выполнена в виде стакана 14, присоединенного дном 15 к торцу 16 выходного вала 4. В данном примере конкретного выполнения стакан 14 выполнен заодно с выходным валом 4, но он может быть присоединен к валу, например, посредством фланцевого соединения. Стакан 14 снабжен узлом фиксации 17 к гибкому колесу 5, выполненному в виде тонкостенного кольца 18. Узел фиксации 17 выполнен в виде шлицевой муфты 19. Электродвигатели 12 установлены внутри стакана 14 на его дне 15, при этом на стенке 20 стакана 14 выполнены n пазов 21 для размещения фланцев 22 электродвигателей 12. Электропитание электродвигателей 12 осуществляется через их провода 23. Осевая фиксация гибкого колеса 5 к стакану 14 осуществляется проволочным кольцом 24.
Волновой привод работает следующим образом: при включений электродвигателей 12 вращение установленных на их валах зубчатых колес 13 через зубчатый венец 10 передается на генератор волн 9. Генератор волн 9 деформирует гибкое колесо 5, вводит его в зацепление с жестким колесом 7 и приводит в движение гибкое колесо 5, связанный с ним шлицевой муфтой 19 стакан 14 и выполненный заодно с ним выходной вал 4. При этом вместе с выходным валом 4 вращаются и электродвигатели 12, установленные на дне 15 стакана 14. Провода 23, закрепленные неподвижно на электродвигателях 12 испытывают скручивание на величину, равную углу поворота выходного вала 4. Поскольку в агрегатах космической техники этот угол невелик - обычно не более 180°, длина проводов 23 значительна, а жесткость проводов на кручение мала, то деформации поворота проводов весьма несущественны, находятся в пределах упругой деформации и не приводят к нарушению их целостности. Пазы 21 позволяют уменьшить до минимума диаметр стакана 14 и гибкого колеса 5. При этом за счет значительного диаметра цилиндрической стенки 21 стакана 14 она обладает большим моментом сопротивления кручению и достаточным запасом прочности, что не повышает уровень напряжений в конструкции по сравнению с напряжениями кручения выходного вала 4 даже при наличии ослабляющих сечение стенки 21 стакана 14 пазов 21. Совокупность всех указанных существенных признаков позволяет уменьшить диаметр гибкого колеса 5 и корпуса 1 на величину, равную сумме диаметра выходного вала и двух толщин охватывающей его втулки в прототипе, т.е. около 20%. Увеличение общей длины привода за счет выступа втулки и выходного вала в сторону, противоположную гибкому колесу, компенсируется уменьшением длины гибкого колеса, т.к. обычно длина гибкого колеса в виде тонкостенного кольца равна его диаметру, и устранением части выходного вала, обращенной в сторону гибкого колеса в прототипе. Таким образом, снижение радиальных габаритов обеспечивается при сохранении осевых. По предварительным расчетам снижение массы составляет около 8%. Кроме того, использование гибкого колеса в виде тонкостенного кольца вместо тонкостенного стакана в прототипе позволяет снизить уровень напряжений в гибком колесе и повысить надежность волнового привода.
Указанные результаты позволяют рекомендовать заявленный привод к использованию в агрегатах авиационной и космической техники.
Литература
1. Патент Российской федерации N 1580088 по кл. F 16 H 1/00, 1993 г.
2. Патент Российской федерации N 2098691 по кл. F 16 H 1/00, 1997 г. прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВОЙ ПРИВОД | 1996 |
|
RU2098691C1 |
| ВОЛНОВОЙ ПРИВОД | 1996 |
|
RU2110711C1 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2136986C1 |
| ВОЛНОВАЯ ГЕРМЕТИЧНАЯ ПЕРЕДАЧА АБРАМОВА В.А. | 2012 |
|
RU2551556C2 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2285162C2 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2000 |
|
RU2174205C1 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2280798C2 |
| ВОЛНОВОЙ ПРИВОД | 2004 |
|
RU2285844C2 |
| ВОЛНОВАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 1998 |
|
RU2131544C1 |
Изобретение относится к машиностроению, в частности к деталям машин, и может быть использовано в составе изделий авиационной и ракетной техники. Волновой привод содержит корпус 1 c втулкой 2, выходной вал 4, гибкое колесо 5, неподвижное жесткое колесо 7, размещенное на корпусе 1, генератор волн 9 и плату 11 c n (n=1, 2 и т.д.) электродвигателями 12, размещенными внутри гибкого колеса 5. Генератор волн 9 установлен на корпусе 1 и снабжен зубчатым венцом 10, входящим в зацепление с зубчатыми колесами 13 электродвигателей 12. Плата 11 выполнена в виде стакана 14, присоединенного дном к торцу 16 выходного вала 4. Стакан снабжен узлом фиксации 17 к гибкому колесу 5, выполненному в виде тонкостенного кольца 18. Электродвигатели 12 установлены внутри стакана 14 на его дне 15. На стенке стакана 14 выполнены n пазов 21 для размещения фланцев 22 электродвигателей. Технический результат - снижение радиальных габаритов без увеличения осевых габаритов и снижение массы. 1 ил.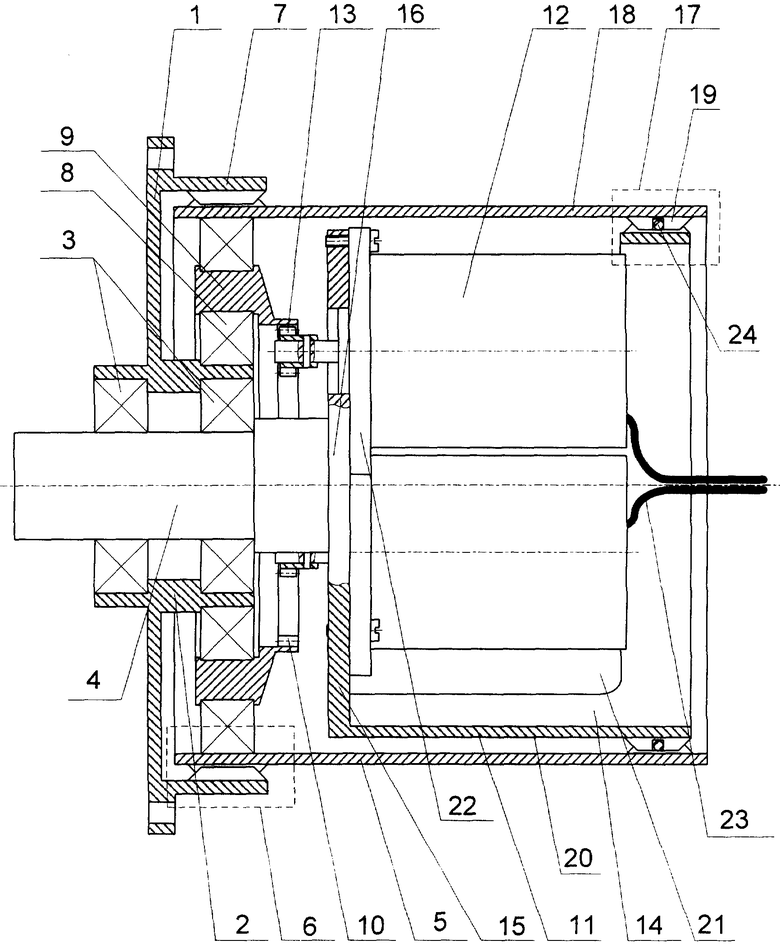
Волновой привод, содержащий корпус с втулкой, установленный в ней на двух подшипниках выходной вал, связанный с гибким колесом волновой передачи с неподвижным жестким колесом, размещенным на корпусе, генератор волн и плату с n (n=1, 2 и т.д.) электродвигателями, размещенными внутри гибкого колеса, при этом генератор волн установлен на корпусе и снабжен зубчатым венцом, входящим в зацепление с зубчатыми колесами электродвигателей, отличающийся тем, что плата выполнена в виде стакана, присоединенного дном к одному из торцов выходного вала и снабженного узлом фиксации к гибкому колесу, выполненному в виде тонкостенного кольца, а электродвигатели установлены внутри стакана на его дне, при этом на стенке стакана выполнены n пазов для размещения фланцев электродвигателей.
| ВОЛНОВОЙ ПРИВОД | 1996 |
|
RU2098691C1 |
| Волновой привод | 1988 |
|
SU1580088A1 |
| ПРИВОД | 1995 |
|
RU2094677C1 |

