Изобретение относится к системам управления с одним управляемым и несколькими управляющими органами и электромеханическими приводами.
Преимущественной областью применения изобретения являются транспортные средства, в том числе самолеты.
В электродистанционных системах управления по патентам SU - 427412, FR - 2748584, GB - 2012080 и 2283582 (все G 05 G 11/00) формирование управляющего сигнала с учетом усилий, прилагаемых двумя операторами, не предусмотрено. Поэтому надежность управления, при прочих равных условиях, понижена.
В основу изобретения положено решение задачи создать электродистанционную систему управления повышенной надежности за счет согласования величины регулирующего воздействия на управляемый орган с усилиями, прилагаемыми двумя операторами к управляющим органам.
Решение задачи достигнуто тем, что в электродистанционной системе управления
- каждый из двух управляющих органов имеет датчик усилия, прилагаемого его оператором,
- каждый из двух электромеханических приводов имеет возможность выполнения функции интегрирующего звена и снабжен датчиком положения,
- устройство управления электромеханическими приводами подключено к выходам обоих датчиков положения и содержит сумматор, соединенный с выходами датчиков усилий, прилагаемых операторами,
- управляемый орган подключен к выходу одного из датчиков положения.
Каждый из операторов воздействует на управляющий орган усилием, соответствующим его представлению о степени отклонения величины регулируемого параметра от требуемой. Суммирование сигналов усилий операторов обеспечивает возможность одному из них скорректировать или нейтрализовать неадекватное усилие другого оператора. При этом устройство управления приводами обеспечивает равенство перемещений приводов и выходных сигналов датчиков положений, поскольку рассогласование этих сигналов приводит к корректировке управляющих сигналов на приводы. Скорость перемещения приводов и подвижных элементов датчиков положений определена интегралом суммы усилий операторов. Чем больше эта сумма, тем больше скорость.
Возможна модификация системы, когда управляющий вход одного из электромеханических приводов соединен через усилитель с выходом сумматора сигналов датчиков усилий, прилагаемых операторами, а управляющий вход другого электромеханического привода соединен через усилитель с выходом сумматора сигналов датчиков положения. Равенство перемещений приводов и выходных сигналов датчиков положений достигается вследствие корректировки сигнала на перемещение одного из приводов при рассогласовании сигналов датчиков положений. Положение подвижного элемента одного из них определено суммой усилий, приложенных операторами. При несовпадении положений приводов и соответствующих подвижных элементов датчиков формируется сигнал на коррекцию перемещения привода, управляемого по сумме сигналов датчиков положений. Интегрирование сигналов происходит раздельно реализацией способности каждого привода выполнять функцию интегрирующего звена.
Возможна модификация системы, когда устройство управления электромеханическими приводами содержит интегрирующий элемент, который
включен между выходом сумматора сигналов датчиков усилий, прилагаемых операторами,
и входами двух управляющих сумматоров, в каждом из которых другой вход соединен с выходом датчика положения соответствующего привода,
а выход - с управляющим входом этого же привода.
Равенство перемещений приводов и положений подвижных элементов датчиков положений обусловлено подачей одинаковых сигналов на управляющие сумматоры, являющиеся усилителями. Из-за наличия обратной связи с датчиком положения способность каждого привода выполнять функцию интегрирующего звена не реализуется. Эту функцию выполняет интегрирующий элемент. Обратная связь на второй вход каждого из управляющих сумматоров с выхода соответствующего датчика положения обеспечивает коррекцию сигнала на управляющий вход электромеханического привода при случайных рассогласованиях положений.
Надежность управления может быть повышена, если между выходом каждого датчика усилия, прилагаемого оператором, и входом сумматора сигналов датчиков усилий включен нелинейный элемент зоны нечувствительности.
Нелинейные элементы отсеивают случайные воздействия, создаваемые вибрацией и непроизвольными усилиями операторов.
При реализации изобретения во многих случаях удобно, если каждый электромеханический привод снабжен редуктором и соединен с датчиком положения посредством одного из управляющих органов и датчика усилия, прилагаемого его оператором.
Соединение привода и датчика положения через управляющий орган приводит к синхронизации перемещения обоих управляющих органов на величину хода, соответствующую перемещению электромеханического привода и датчика положения. Операторы воспринимают свое воздействие, как воздействие непосредственно на перемещение управляющего органа и подвижного элемента датчика положения. Редуктор же предотвращает возможность перемещения оператором привода и создает требуемое увеличение силы, необходимой для перемещения и удерживания управляющего органа.
При одной из возможных реализаций изобретения на самолете к сумматору сигналов датчиков усилий подключены датчики усилий, прилагаемых членами экипажа самолета к рычагам управления его двигателем, каждый из датчиков положения является датчиком положения соответствующего рычага управления двигателем, а управляемый орган является приводом насоса-регулятора этого двигателя.
Совместное управление двигателем создает возможность обучения одного из членов экипажа либо предотвращения аварии при потере одним из них работоспособности.
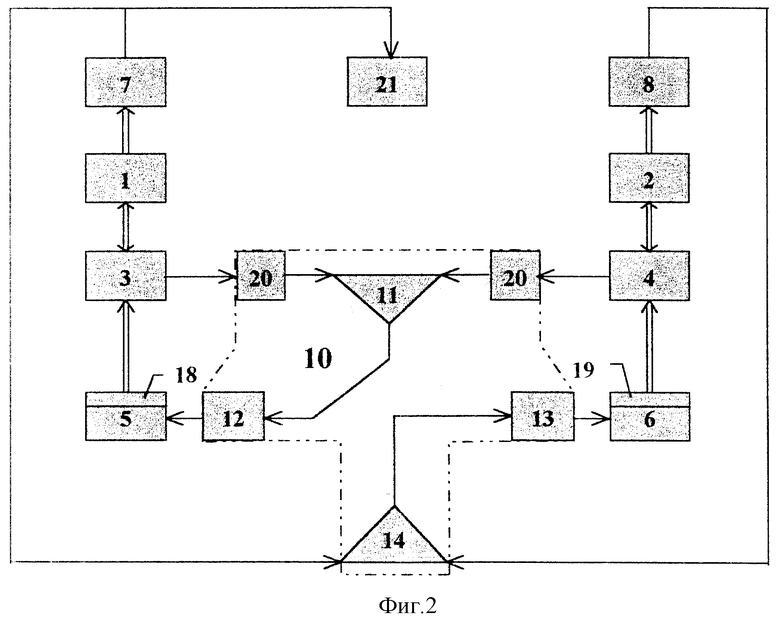
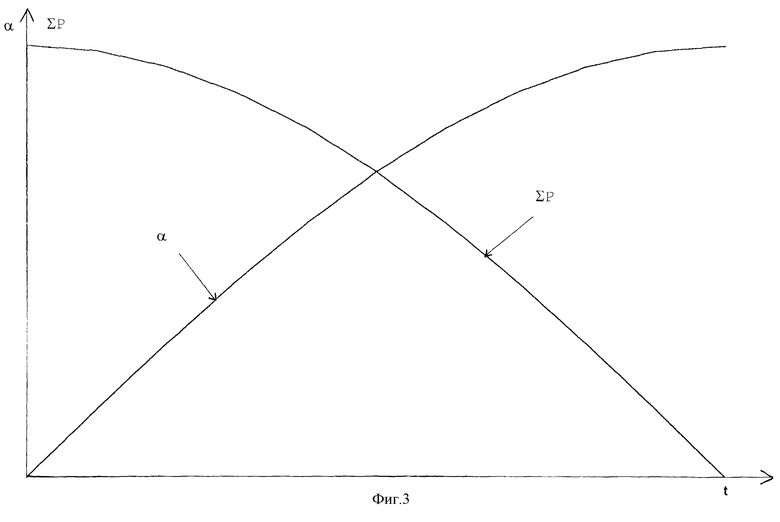
Далее изобретение поясняется описанием конкретных примеров его выполнения со ссылками на прилагаемые чертежи, на фиг. 1 и 2 которых изображены две модификации электродистанционной системы управления согласно изобретению, а на фиг. 3 - график изменения усилий и положения приводов.
В любой модификации изобретения каждый из двух управляющих органов 1 и 2 имеет датчик 3 или 4 усилия, прилагаемого его оператором.
В любой модификации изобретения каждый из двух электромеханических приводов 5 и 6 имеет датчик 7 или 8 его положения и выполнен с возможностью выполнения функции интегрирующего звена.
Устройство 9 или 10 управления электромеханическими приводами 5 и 6 содержит сумматор 11, соединенный с выходами датчиков 3 и 4.
Устройства 9 и 10 подключены к выходам обоих датчиков положения. Управляемый орган 21 подключен к выходу одного из датчиков положения.
Каждый из операторов воздействует на управляющий орган усилием, соответствующим его представлению о степени отклонения величины регулируемого параметра от требуемой. Суммирование сигналов усилий обеспечивает возможность одному из операторов нейтрализовать неадекватное усилие другого оператора. При этом устройство 9 или 10 управления приводами 5 и 6 обеспечивает равенство перемещений приводов и выходных сигналов датчиков 7 и 8 положений, поскольку рассогласование этих сигналов приводит к корректировке управляющих сигналов на приводы. Скорость перемещения приводов и подвижных элементов датчиков положений определена интегралом суммы усилий операторов. Чем больше эта сумма, тем больше скорость.
Возможна модификация системы (фиг. 2), когда интегрирование реализуется самими электромеханическими приводами. В этом случае управляющий вход электромеханического привода 5 соединен через усилитель 12 с выходом сумматора 11 сигналов датчиков усилий, прилагаемых операторами, а управляющий вход электромеханического привода 6 соединен через усилитель 13 с выходом сумматора 14 сигналов датчиков положения.
Равенство перемещений приводов 5 и 6 и выходных сигналов датчиков 7 и 8 положений достигается вследствие корректировки сигнала на перемещение одного из приводов при рассогласовании сигналов датчиков положений. Положение подвижного элемента датчика 7 определено интегралом суммы усилий, приложенных операторами. При несовпадении положений приводов 5 и 6 и соответствующих подвижных элементов датчиков 7 и 8 формируется сигнал на коррекцию перемещения привода 6, управляемого по сумме сигналов датчиков 7 и 8. Интегрирование сигналов происходит раздельно.
Возможна модификация системы (фиг. 1), когда интегрирующий элемент 15 устройства 9 управления электромеханическими приводами включен между выходом сумматора 11 сигналов датчиков 3 и 4 и входами двух управляющих сумматоров 16 и 17. В каждом из сумматоров 16, 17 другой вход соединен с выходом датчика 7 или 8 соответственно, а выход - с управляющим входом привода 5 или 6.
Равенство перемещений приводов 5 и 6 и положений подвижных элементов датчиков 7 и 8 положений обусловлено подачей одинаковых сигналов на управляющие сумматоры 16, 17. Обратная связь на второй вход каждого из управляющих сумматоров с выхода соответствующего датчика положений обеспечивает коррекцию сигнала на управляющий вход электромеханического привода при случайных рассогласованиях положений.
Надежность управления может быть повышена, если между выходом каждого датчика усилия, прилагаемого оператором, и входом сумматора сигналов датчиков усилий включен нелинейный элемент 20 зоны нечувствительности.
Нелинейные элементы отсеивают случайные воздействия, создаваемые вибрацией и непроизвольными усилиями операторов.
Каждый электромеханический привод 5 и 6 снабжен редуктором 18, 19 и соединен с датчиком 7, 8 положения посредством одного из управляющих органов 1, 2 и датчика 3, 4 усилия, прилагаемого его оператором.
Соединение привода и датчика положения через управляющий орган приводит к синхронизации перемещения обоих управляющих органов на величину хода, соответствующую перемещению электромеханического привода и датчика положения. Каждый оператор считает, что, воздействуя на управляющий орган, он перемещает его и подвижный элемент датчика положения. Редуктор предотвращает возможность перемещения оператором привода и создает требуемое увеличение силы, необходимой для перемещения и удерживания управляющего органа.
При реализации изобретения на самолете к сумматору сигналов датчиков усилий подключены датчики усилий, прилагаемых членами экипажа самолета к рычагам управления его двигателем. Каждый из датчиков положения является датчиком положения соответствующего рычага управления двигателем, а управляемый орган является приводом насоса-регулятора этого двигателя.
Совместное управление двигателем создает возможность обучения одного из операторов либо предотвращения аварии при потере одним из них работоспособности.
При реализации изобретения на самолете электромеханический привод перемещает механически соединенные между собой датчик усилий, рычаг управления и датчик положения рычага до тех пор, пока сигнал датчика положения не станет равным сигналу с выхода интегрирующего элемента 15. Аналогично другой электромеханический привод перемещает другой датчик усилий, рычаг управления и датчик положения, пока сигнал с датчика положения не сравняется с сигналом интегрирующего элемента. В результате оба рычага займут синхронное положение, соответствующее сигналу с выхода интегрирующего элемента. Поскольку на вход интегрирующего элемента 15 поступает сигнал, равный алгебраической сумме усилий, прилагаемых членами экипажа, то в случае разнонаправленности этих усилий, оба рычага будут перемещаться в сторону большего усилия до тех пор, пока сигнал суммы усилий на выходе сумматора не обнулится. Таким образом достигается синхронное положение и перемещение обоих рычагов в сторону большего усилия в случае их разнонаправленности. Система имитирует механическую связь между двумя постами управления. Каждый оператор получает визуальную и/или слуховую информацию об отклонении регулируемого параметра от нормы. Силовое воздействие операторов на управляющие органы продолжается до тех пор, пока регулируемый параметр не достигнет нормы.
При изменении суммы усилий ( Σ P на фиг. 3) соответственно изменяется перемещение электромеханических приводов и датчиков их положений и привода насоса-регулятора ( α на фиг. З). Аналогично изменяется и перемещение рычагов управления двигателем и датчиков усилий, прилагаемых членами экипажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СПОСОБ ОБУЧЕНИЯ УПРАВЛЕНИЮ ТРАНСПОРТНЫМ СРЕДСТВОМ И ТРЕНАЖЕР | 1995 |
|
RU2131623C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МАРШЕВЫХ ДВИГАТЕЛЕЙ САМОЛЕТА | 1998 |
|
RU2122510C1 |
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 1998 |
|
RU2128127C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЗДУХОЗАБОРНИКОМ ДВИГАТЕЛЯ САМОЛЕТА | 1997 |
|
RU2131051C1 |
| ВОЗДУХОЗАБОРНИК ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2140378C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПОЛОЖЕНИЯ РУКОЯТКИ УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2193991C1 |
Изобретение относится к электродистанционным системам управления. Технический результат заключается в повышении надежности управления. Каждый из двух управляющих органов имеет датчик усилия, прилагаемого его оператором. Каждый из двух электромеханических приводов имеет датчик его положения и выполнен с возможностью выполнения функции интегрирующего звена. Устройство управления электромеханическими приводами содержит сумматор, соединенный с выходами датчиков усилий, и подключено к выходам обоих датчиков положения. Управляемый орган подключен к выходу одного из датчиков положения. Управляющий вход одного из приводов может быть соединен с выходом сумматора сигналов датчиков усилий, а управляющий вход другого привода - с выходом сумматора сигналов датчиков положения. Между выходом сумматора сигналов датчиков усилий и входами двух управляющих сумматоров может быть включен интегрирующий элемент. В каждом из управляющих сумматоров другой вход соединен с выходом датчика положения соответствующего привода, а выход - с управляющим входом этого же привода. Каждый привод может быть снабжен редуктором и соединен с датчиком положения посредством одного из управляющих органов и датчика усилия. 2 с. и 4 з.п.ф-лы, 3 ил.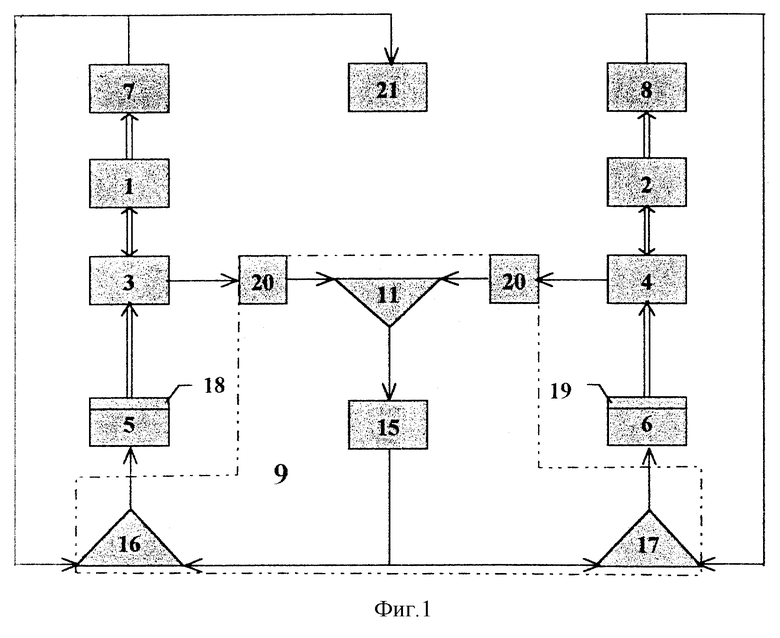
| МНОГОРЯДНЫЙ ПЕРЕКЛЮЧАТЕЛЬ С АВТОМАТИЧЕСКИМ СБРОСОМ | 1972 |
|
SU427412A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ОБЪЕКТА | 1991 |
|
RU2018914C1 |
| СИСТЕМА ДАТЧИКА ГАЗА | 2019 |
|
RU2748584C1 |
| ОРУДИЕ ДЛЯ ПРИКАТЫВАНИЯ ПОЧВЫ | 2021 |
|
RU2762412C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕРАБОТКИ ТВЕРДЫХ РАДИОАКТИВНЫХ ОТХОДОВ | 1992 |
|
RU2012080C1 |
| КАПЕЛЬНЫЙ ВОДОВЫПУСК | 2005 |
|
RU2283582C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕСУЩЕЙ СПОСОБНОСТИ ГРУНТА ПРИ ЗАБИВКЕ СВАЙ | 1994 |
|
RU2102562C1 |

