Изобретение относится к средствам управления для приведения в действие органов управления самолетом, предназначенных для изменения или поддержания его положения.
Известна система управления самолетом, которая включает в себя датчики параметров полета, аэродинамические органы управления с приводами и датчики положений управляющих и управляемых органов, систему отклонения вектора тяги маршевых двигателей, а также имеет каналы управления положением самолета относительно осей связанной системы координат с вычислителями. Описанная система раскрыта в полезной модели РФ 4109, кл. В 64 С 30/00, опубл. 16.05.1997. Однако эта система управления не обеспечивает всестороннее расширение функциональных возможностей самолета.
Из уровня техники также известна система управления самолетом, содержащая аэродинамические поверхности, используемые как органы управления, устройства управления вектором тяги двигателей с приводами, вычислители продольного и путевого управления аэродинамическими поверхностями, корректоры сигналов управления приводами устройств управления вектором тяги, а также датчики углов атаки, скоростного напора и высоты (см. патент РФ 2122963, кл. В 64 С 15/02, опубл. 10.12.1998). Данная система позволяет отклонять вектор тяги двигателей только в случаях исчерпания возможностей по управлению положением самолетом аэродинамическими органами управления.
Возможности указанной системы управления ограничены и потому расширение функциональных возможностей самолета в процессе маневрирования и крейсерского полета не может быть реализовано в полном объеме. Указанный недостаток системы управления связан с тем, что в ней не предусмотрена взаимосвязь средств изменения направления вектора тяги со средствами управления аэродинамическими органами управления.
Предлагаемое изобретение направлено на расширение функциональных возможностей системы управления самолетом и, как следствие, расширение возможностей самолета при выполнении маневров. Для этого система управления самолетом содержит задатчики изменения положения самолета относительно осей связанной системы координат, датчики угловых скоростей самолета относительно осей связанной системы координат, углов атаки и скольжения, высоты полета, скоростного напора и перегрузки, положения и обжатия опор шасси, приводы аэродинамических органов управления положением самолета относительно осей связанной системы координат и устройств, изменяющих направление вектора тяги двигателей, а также подключенное к упомянутым выше задатчикам и датчикам средство управления указанными приводами с выходами для подключения последних. Упомянутое средство управления включает в себя вычислители каналов управления по тангажу, крену и курсу, формирующие управляющие сигналы для изменения положения самолета относительно осей связанной системы координат, сумматоры сигналов вычислителей каналов управления по тангажу и крену, связывающие указанные вычислители с выходами средства управления приводами для подключения флаперонов и/или консолей хвостового цельноповоротного горизонтального оперения или элевонов, а также установленные в линии связи вычислителя канала управления по тангажу с выходом средства управления приводами для подключения приводов устройств, изменяющих направление вектора тяги, корректоры сигналов управления приводами указанных устройств, одним из которых является корректор по скоростному напору и высоте, или снабжено средствами формирования указанных вычислителей, корректоров и сумматоров.
На тех режимах, когда аэродинамические органы управления самолетом малоэффективны или недостаточны для создания требуемых моментов относительно осей связанной системы координат, а также на режимах, при которых потери на балансировку с использованием аэродинамических органов превышают потери с использованием для балансировки отклонения вектора тяги, средство управления приводами формирует и выдает параллельно с управляющими сигналами аэродинамическим органам управления соответствующие управляющие сигналы на приводы устройств, изменяющих направление вектора тяги двигателей.
Для эффективного управления устройствами, изменяющими направление вектора тяги двигателей на некоторых режимах, вычислитель канала управления по тангажу связан с выходом средства управления приводами для подключения приводов устройств, изменяющих направление вектора тяги двигателей, посредством нелинейного корректора, соединенного с корректором по скоростному напору и высоте, выход которого соединен с корректором по положению шасси, соединенным с ограничителем управляющего сигнала, или снабжено средствами формирования таких корректоров и ограничителя и их связей между собой, с вычислителем канала управления по тангажу и указанным выше выходом или выполнено с возможностью выполнения функций, соответствующих сочетанию указанных корректоров и ограничителя.
На самолетах, имеющих регулируемое переднее горизонтальное оперение, средство управления приводами включает в себя вычислитель-корректор по углу атаки, скоростному напору и высоте полета, связывающий вычислитель канала управления по тангажу с выходом средства управления приводами для подключения привода регулируемого переднего горизонтального оперения, либо снабжено средствами формирования такого вычислителя-корректора и его связей с датчиками угловых скоростей самолета относительно осей связанной системы координат, углов атаки и скольжения, высоты полета, скоростного напора и перегрузки, положения и обжатия опор шасси, а также с указанным вычислителем и выходом для подключения привода регулируемого переднего горизонтального оперения.
Если же самолет имеет убираемое переднее горизонтальное оперение, то средство управления приводами содержит вычислитель, формирующий сигнал складывания регулируемого переднего горизонтального оперения, связанный с выходом для подключения привода складывания, либо снабжено средствами формирования такого вычислителя и его связей с датчиками угловых скоростей самолета относительно осей связанной системы координат, углов атаки и скольжения, высоты полета, скоростного напора и перегрузки, положения и обжатия опор шасси и выходом средства управления приводами для подключения привода складывания, или выполнено с возможностью выполнения функций указанного вычислителя.
На самолетах, выполненных по схеме "бесхвостка", в средстве управления приводами выходы для подключения приводов щитков руля высоты связаны с вычислителем канала управления по тангажу.
На режимах достаточной эффективности аэродинамических органов управление по тангажу или крену может осуществляется флаперонами. Для этого средство управления приводами имеет два сумматора, установленные в линии связи вычислителей каналов управления по тангажу и крену с выходами для подключения приводов флаперонов.
На некоторых самолетах одновременно с флаперонами или независимо от них управление по тангажу или крену может осуществляться хвостовым цельноповоротным горизонтальным оперением. В этом случае средство управления приводами имеет два сумматора, связывающие вычислители каналов управления по тангажу и крену с выходами для подключения приводов консолей хвостового цельноповоротного горизонтального оперения.
При наличии на самолете элевонов средство управления приводами содержит два сумматора, связывающие вычислители каналов управления по тангажу и крену с выходами для подключения приводов элевонов.
Структурная схема одного из возможных вариантов системы управления самолетом показана на прилагаемом чертеже.
В описываемую систему входят:
1 - задатчик изменения положения самолета относительно поперечной оси связанной системы координат;
2 - задатчик изменения положения самолета относительно продольной оси связанной системы координат;
3 - задатчик изменения положения самолета относительно нормальной оси связанной системы координат;
4 - датчик угла атаки;
5 - датчик угла скольжения;
6 - датчик скоростного напора;
7 - датчик угловой скорости самолета относительно поперечной оси связанной системы координат;
8 - датчик высоты полета;
9 - датчик угловой скорости самолета относительно нормальной оси связанной системы координат;
10 - датчик положения опор шасси самолета;
11 - датчик угловой скорости самолета относительно продольной оси связанной системы координат;
12 - датчик обжатия опор шасси;
13 - датчик поперечной перегрузки;
14 - датчик вертикальной перегрузки. Описываемая система управления содержит:
15 - привод правого флаперона;
16 - привод левого флаперона;
17 - привод правого элевона;
18 - привод левого элевона;
19 - привод устройства, изменяющего направление вектора тяги правого двигателя;
20 - привод устройства, изменяющего направление вектора тяги левого двигателя;
21 - привод правого щитка руля высоты или правой консоли хвостового цельноповоротного горизонтального оперения;
22 - привод левого щитка руля высоты или левой консоли хвостового цельноповоротного горизонтального оперения;
23 - привод руля направления;
24 - привод регулируемого переднего горизонтального оперения;
25 - привод складывания переднего горизонтального оперения;
26 - средство управления указанными приводами.
Средство 26 управления приводами может состоять из совокупности элементов в виде аналоговых блоков:
27 - вычислитель канала управления по тангажу;
28 - вычислитель канала управления по крену;
29 - вычислитель канала управления по курсу;
30 - нелинейный корректор;
31 - корректор по скоростному напору и высоте;
32 - корректор по положению шасси;
33 - ограничитель управляющего сигнала;
34, 35, 36, 37, 38, 39 - сумматоры;
40 - вычислитель-корректор по высоте, углу атаки и скоростному напору;
41 - вычислитель складывания переднего горизонтального оперения.
Система управления содержит аэродинамические органы управления - флапероны, элевоны, цельноповоротный дифференциальный хвостовой стабилизатор или щитки руля высоты, переднее оперение, руль направления. Также в систему управления входят устройства, изменяющие направление вектора тяги двигателей, - поворотные сопла. Аэродинамические органы управления могут быть раздельными (каждый из аэродинамических органов создает управляющий момент в своем канале управления) либо совмещенными, т.е. создающими управляющие моменты в нескольких каналах управления. Совмещенными аэродинамическими органами управления являются флапероны, элевоны, цельноповоротный дифференциальный хвостовой стабилизатор. Приводы 15-25 органов управления связаны с соответствующими выходами подключения средства 26 управления этими приводами. Последнее средство 26 управления приводами соединено с задатчиками 1-3 изменения положения самолета относительно осей связанной системы координат и датчиками 4-14 угловых скоростей самолета относительно осей связанной системы координат, углов атаки и скольжения, высоты полета, скоростного напора и перегрузки, положения и обжатия опор шасси.
Средство 26 управления приводами органов управления включает в себя вычислители 27-29 каналов управления по тангажу, крену и курсу соответственно. Указанные вычислители формируют управляющие сигналы для изменения положения самолета относительно осей связанной системы координат, которые поступают на выходы подключения соответствующих органов управления.
На входы вычислителя 27 канала управления по тангажу подаются сигналы от задатчиков 1 и 3 изменения положения самолета относительно поперечной и нормальной осей связанной системы координат, а также датчиков 4, 6, 7, 8, 10, 12 и 14 угла атаки, скоростного напора, угловой скорости самолета относительно поперечной оси связанной системы координат, высоты полета, положения опор шасси самолета, обжатия опор шасси и вертикальной перегрузки соответственно.
Вырабатываемые сигналы управления от вычислителя 27 канала управления по тангажу средства 26 управления приводами органов управления поступают на сумматоры 34, 39, 35, 38, 36, 37 аэродинамических органов управления - правого и левого флаперонов, правого и левого элевонов, правого и левого щитков руля высоты или правой и левой консолей хвостового цельноповоротного горизонтального оперения соответственно. Каждый из перечисленных органов управления связан с вычислителем 27 канала управления по тангажу через соответствующий сумматор. Сигнал управления, поступающий на сумматоры 36 и 37 консолей хвостового цельноповоротного горизонтального оперения или щитков руля высоты, также поступает на нелинейный корректор 30, установленный в линии управления устройствами, изменяющими направление вектора тяги. Сигнал управления, выдаваемый вычислителем 27 канала управления по тангажу, преобразуется в последовательно соединенных друг с другом нелинейном корректоре 30, корректоре 31 по скоростному напору и высоте, корректоре 32 по положению шасси и ограничитель 33 управляющего сигнала. Этот сигнал поступает на приводы средств, изменяющих направление вектора тяги. Кроме того, средство 26 управления приводами может быть снабжено средствами формирования таких корректоров и ограничителя и их связей между собой, с вычислителем 27 канала управления по тангажу и указанным выше выходом. Введение указанных элементов позволяет с увеличением скоростного напора или высоты уменьшить величину управляющего сигнала.
В зависимости от положения опор шасси устанавливаются три режима отклонения вектора тяги - взлетный, полетный или посадочный.
В случае наличия у самолета регулируемого переднего горизонтального оперения средство 26 управления приводами дополнительно включает вычислитель-корректор 40 по углу атаки, скоростному напору и высоте полета, через который вычислитель 27 канала управления по тангажу связан с выходом средства 26 управления приводами для подключения привода 24 переднего горизонтального оперения. На вычислитель-корректор 40 по высоте, углу атаки и скоростному напору поступают сигналы от вычислителя 27 канала управления по тангажу, датчиков 4, 6, 8 угла атаки, скоростного напора, высоты полета и от вычислителя 41 складывания переднего горизонтального оперения. Сигнал, поступающий на вычислитель-корректор 40 от вычислителя 27 канала управления по тангажу, является тем же сигналом, что поступает и на сумматоры 36, 37 приводов консолей хвостового горизонтального оперения и на нелинейный корректор 30. С выхода вычислителя-корректора 40 по высоте, углу атаки и скоростному напору управляющий сигнал поступает на вход привода 24 регулируемого переднего горизонтального оперения.
Если переднее горизонтальное оперение выполнено складывающимся, то средство 26 управления приводами содержит вычислитель 41. На входы вычислителя 41 поступают сигналы с выходов датчиков 6, 8 скоростного напора и высоты полета соответственно. На основе получаемых сигналов в указанном вычислителе 41 формируется сигнал управления приводом 25 складывания переднего горизонтального оперения.
Вычислитель 28 канала управления по крену средства 26 управления приводами органов управления получает сигналы от задатчика 2 изменения положения самолета относительно продольной оси связанной системы координат, датчиков 4-6, 8-12 угла атаки, угла скольжения, скоростного напора, высоты полета, угловой скорости самолета относительно нормальной оси связанной системы координат, положения опор шасси самолета, угловой скорости самолета относительно продольной оси связанной системы координат и обжатия опор шасси. С вычислителя 28 канала управления по крену сигналы управления поступают на сумматоры 34-39 аэродинамических органов управления - флаперонов, элевонов, консолей хвостового горизонтального оперения или щитков руля направления, где складываются с сигналами вычислителя 27 канала управления по тангажу.
В вычислитель 29 канала управления по курсу поступают сигналы от задатчиков 1 и 2 изменения положения самолета относительно поперечной и продольной осей связанной системы координат соответственно, и от датчиков 4, 5, 6, 7, 8, 9, 10, 12 и 13 - угла атаки, угла скольжения, скоростного напора, угловой скорости самолета относительно поперечной оси связанной системы координат, высоты полета, угловой скорости самолета относительно нормальной оси связанной системы координат, положения опор шасси, обжатия опор шасси и поперечной перегрузки соответственно. Сигнал управления от вычислителя 29 канала управления по курсу поступает на привод 23 руля направления. Этот сигнал пропорционален требуемому углу отклонения органа управления - руля направления.
Средство 26 управления приводами органов управления может быть цифровой электронной вычислительной машиной, снабженной соответствующей программой, обеспечивающей формирование указанных элементов средства 26 управления приводами и их связей.
Использование предлагаемой системы осуществляют следующим образом.
При взлете самолета после достижения скорости разбега, при которой аэродинамические органы управления становятся эффективны, пилот переводит задатчик 3 изменения положения самолета относительно нормальной оси связанной системы координат в положение увеличения угла атаки. Вычислитель 27 канала управления по тангажу формирует в соответствии с сигналами задатчика 3 изменения положения самолета относительно нормальной оси связанной системы координат и датчиков 4, 6, 7, 8, 10, 12, 14 угла атаки, скоростного напора, угловой скорости самолета относительно поперечной оси связанной системы координат, высоты, положения опор шасси самолета, обжатия опор шасси, вертикальной перегрузки, соответственно, управляющий сигнал. Управляющий сигнал подается на сумматоры 35, 36, 37, 38 и вычислитель-корректор 40 по высоте, углу атаки и скоростному напору, а также на нелинейный корректор 30. При отсутствии сигнала с задатчика 2 изменения положения самолета относительно продольной оси связанной системы координат на вычислитель 28 канала управления по крену управляющий сигнал поступает на выходы средства 26 управления приводами для подключения приводов 17, 18 правого и левого элевонов и 21, 22 правого и левого щитков руля высоты или правой и левой консолей хвостового цельноповоротного горизонтального оперения. Хвостовое горизонтальное оперение может быть выполнено дифференциальным. Одновременно вычислитель-корректор 40 по высоте, углу атаки и скоростному напору формирует управляющий сигнал, поступающий на выход для подключения привода 24 регулируемого переднего горизонтального оперения. После этого с помощью соответствующих приводов отклоняются аэродинамические органы управления, а именно элевоны, щитки руля высоты или консоли дифференциального стабилизатора и переднее горизонтальное оперение на кабрирование. При достижении скорости разбега, близкой к той, при которой момент сил, создаваемый совместно отклоненными аэродинамическими органами управления и вектором тяги, достаточен для отрыва от взлетно-посадочной полосы (ВПП) передней опоры шасси самолета, управляющий сигнал поступает на выходы средства 26 управления приводами органов управления для подключения приводов 19 и 20 устройств, изменяющих направление вектора тяги двигателей.
После отрыва передней опоры шасси от ВПП пилот переводит задатчик 3 изменения положения самолета относительно нормальной оси связанной системы координат в положение, при котором угол атаки соответствует возможному увеличению коэффициента подъемной силы за счет экранного эффекта близости ВПП, и в дальнейшем поддерживает такой угол атаки до отрыва от ВПП основных опор шасси самолета. При этом средство 26 управления приводами органов управления формирует соответствующие управляющие сигналы на приводы 17, 18, 19, 20, 21, 22, 24 аэродинамических органов управления и устройств, изменяющих направление вектора тяги двигателей. В процессе разбега с поднятой передней опорой шасси балансировка самолета по тангажу осуществляется отклонением вектора тяги, а аэродинамические органы управления устанавливаются в положение, соответствующее наибольшему из возможных значению коэффициента подъемной силы.
После отрыва от ВПП основных опор шасси в процессе разгона самолета на воздушном участке взлета пилот посредством задатчика 3 изменения положения самолета относительно нормальной оси связанной системы координат поддерживает угол атаки и расстояние до земли, соответствующими наибольшему из возможных значению коэффициента подъемной силы, повышенному за счет экранного эффекта близости земли. При этом балансировку самолета по тангажу осуществляют отклонением вектора тяги, а аэродинамические органы управления устанавливают в положение, соответствующее наибольшему из возможных значению коэффициента подъемной силы, повышенному за счет экранного эффекта близости земли. При других режимах полета система управления функционирует аналогично изложенному в зависимости от сигналов, поступающих в вычислитель 28 канала управления по крену от указанных выше задатчиков и датчиков. Средство 26 управления приводами органов управления положением самолета формирует управляющие сигналы, которые поступают на соответствующие приводы, из условий обеспечения требуемых летно-технических характеристик самолета.
Применение описанной системы управления позволяет управлять самолетом на сверхмалых скоростях полета, производить маневры на больших углах атаки с увеличенными угловыми скоростями изменения положения, что позволяет сократить время на необходимые режимы пилотирования и улучшить динамические характеристики самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ МАРШЕВЫХ ДВИГАТЕЛЕЙ САМОЛЕТА | 1998 |
|
RU2122510C1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 1998 |
|
RU2128127C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| САМОЛЕТ | 1994 |
|
RU2107011C1 |
| ПРИЦЕЛЬНАЯ СИСТЕМА | 1998 |
|
RU2129696C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |
| САМОЛЕТ С СИСТЕМОЙ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2011 |
|
RU2472672C1 |
| САМОЛЁТ | 2002 |
|
RU2212359C1 |
Система содержит задатчики изменения положения самолета относительно осей связанной системы координат, датчики угловых скоростей относительно осей системы координат, углов атаки и скольжения, высоты полета, скоростного напора и перегрузки, положения и обжатия опор шасси, приводы аэродинамических органов управления положением самолета относительно осей системы координат и устройств, изменяющих направление вектора тяги двигателей, а также средство управления приводами. Последнее средство подключено к задатчикам и датчикам и включает в себя вычислители каналов управления по тангажу, крену и курсу, сумматоры сигналов вычислителей каналов управления по тангажу и крену, корректоры сигналов управления приводами устройств, изменяющих направление вектора тяги. Средство управления приводами может быть снабжено средствами формирования вычислителей, корректоров и сумматоров или выполнено с возможностью выполнения функций, соответствующих сочетаниям вычислителей, корректоров и сумматоров. Система позволяет управлять самолетом на сверхмалых скоростях полета, производить маневры на больших углах атаки с увеличенными угловыми скоростями изменения положения. 4 з.п. ф-лы, 1 ил.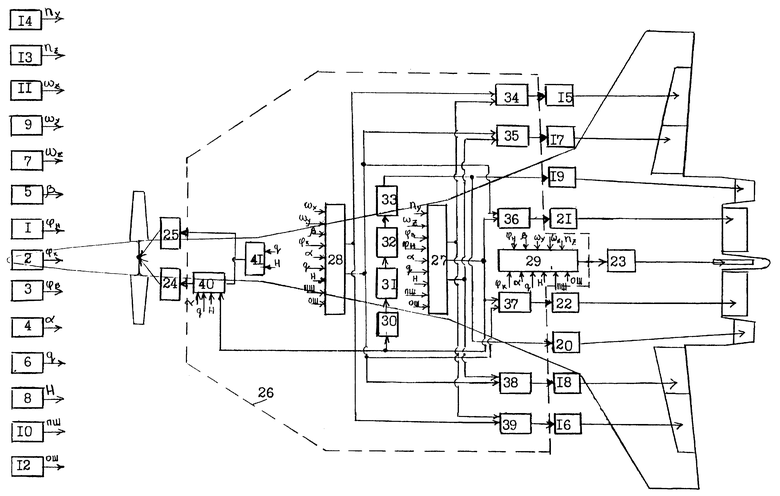
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122963C1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ПЕНОГОННОГО СРЕДСТВА ДЛЯ ТУШЕНИЯ ПОЖАРОВ И АППАРАТ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 1926 |
|
SU4109A1 |
| УПРАВЛЕНИЕ САМОЛЕТОМ ПОСРЕДСТВОМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ | 1998 |
|
RU2122511C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНОГО САМОЛЕТА | 1995 |
|
RU2084375C1 |

