Изобретение относится к подшипникам для машин, которые являются опорами и под воздействием которых элементы машин приводятся в нутационное движение.
В данном описании нутационное движение элемента машины относительно неподвижной рамы определяется как движение элемента, ось которого пересекается со стационарной осью неподвижной рамы и описывает коническую поверхность вокруг нее. В общем случае совершающий нутационное движение элемент производит вращательное движение вокруг своей оси относительно неподвижной рамы с траекторией в виде сетки. Специальным случаем нутационного движения является движение, в котором совершающий нутационное движение элемент не совершает вращательного движения с траекторией в виде сетки.
Машины, совершающие нутационное движение, могут иметь различные применения, включая применения, в которых требуются передача инерционных нагрузок, передача сил высоких давлений и те случаи, когда требуется характерное движение, описывающее коническую поверхность. Применения, включающие передачу инерционных нагрузок, могут включать приводные механизмы для вибрационных сит и уплотнителей, вибрационных жидкостных и порошковых смесителей и вибрационных мельниц. Машины, совершающие нутационное движение, могут создавать большие инерционные силы вследствие амплитуды вращения оси совершающего нутационное движение элемента вокруг стационарной оси. Скорости движения поверхностей и общая кинетическая энергия совершающих нутационное движение элементов обычно относительно малы по сравнению с эксцентриковыми вращающимися машинами, создающими эквивалентные инерционные силы. Применения для передачи сил высоких давлений могут включать оборудование для измельчения, аналогичное валковым дробилкам высокого давления, в которых материал сжимается между двумя соприкасающимися по одной линии поверхностями до тех пор, пока не произойдет его разрушение.
Было установлено, что машины, совершающие нутационное движение, особенно целесообразны для применения в процессах измельчения высокой интенсивности. В этом случае камера приводится в нутационное движение, чтобы создать поле сил центробежного ускорения внутри камеры, в которой находятся свободные мелющие тела и твердые частицы, подлежащие измельчению. Движение и усилия внутри массы мелющих тел вызывают постепенное разрушение твердых частиц со скоростью, определяемой центробежным ускорением камеры, совершающей нутационное движение. Характеристикой высокоинтенсивных машин для измельчения является то, что очень высокие поверхностные нагрузки имеют место на опорных поверхностях, под воздействием которых камера приводится в нутационное движение. Результатом этого могут быть чрезмерные потери энергии и износ, вызываемый высокими скоростями скольжения контактирующих поверхностей, если контактирующие поверхности не имеют соответствующих соотношений размеров. Применение машин, совершающих нутационное движение, геометрия которых описана в данном изобретении, дает возможность иметь низкие потери энергии, результатом чего является высокая механическая эффективность машины.
Подшипники для машины, совершающей нутационное движение, сконструированные в соответствии с известным уровнем техники, создают большие потери энергии и износ опорных поверхностей. Настоящее изобретение обеспечивает простое и эффективное средство для преодоления этих недостатков.
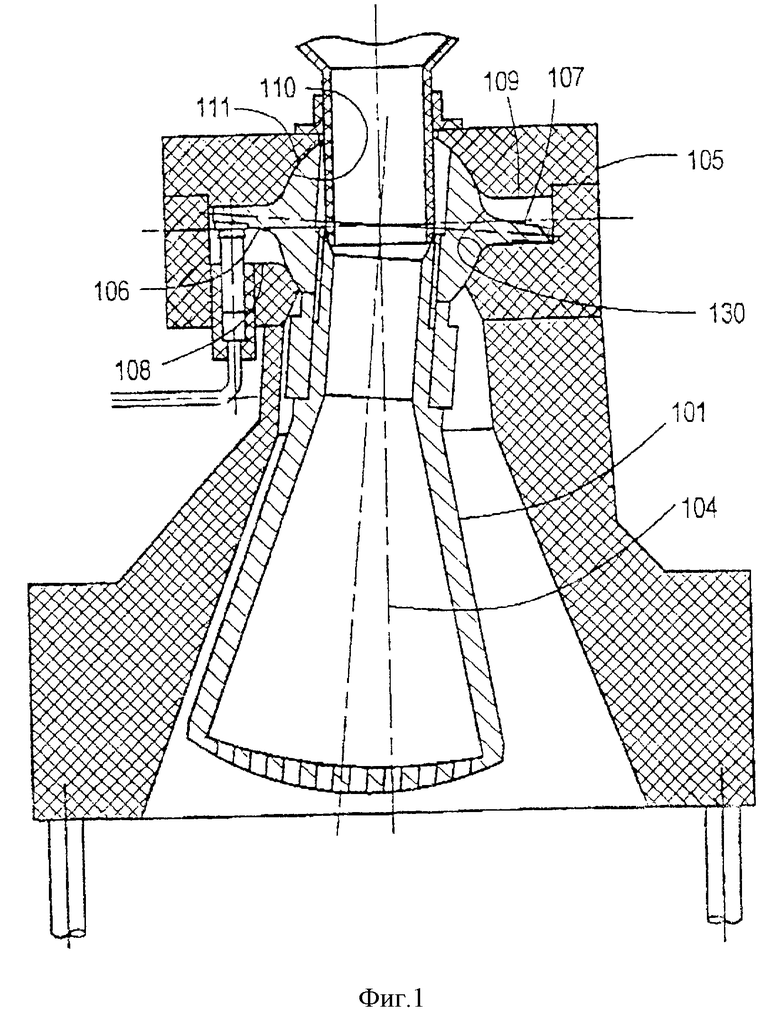
На фиг. 1 показан пример выполнения опорных подшипников по известному уровню техники, обычно используемых в машинах, совершающих нутационное движение, того типа, к которому может быть применено настоящее изобретение. На фиг. 1 показан опорный подшипник для машины, совершающей нутационное движение, описанный в Австралийской заявке на патент 568949. Элемент 101 приводится в нутационное движение вокруг стационарной оси 104 под воздействием дополнительных пар опорных поверхностей 106, 108 и 107, 109. В этом примере траектории контакта на дополнительных парах опорных поверхностей 106, 108 и 107, 109 не подвергаются воздействию для того, чтобы отношения длин траекторий контакта были равны. Вследствие этого на опорных поверхностях имеет место значительное скольжение контактирующих поверхностей с последующими значительным износом и потерями энергии. На фиг. 1 также показаны дополняющие добавочные сферические опорные поверхности 110 и 111 на элементе 101 и элементе рамы 105 соответственно, которые находятся в тесном контакте и воздействуют на положение элемента 101 посредством совмещения центров сферических поверхностей 110 и 111. Важной функцией опорных поверхностей 110 и 111 является передача сил реакции, направленных перпендикулярно к стационарной оси 104, от элемента 101 к элементу 105 в любой плоскости, содержащей стационарную ось 104. Радиусы 130 совершающего нутационное движение элемента 101 по фиг. 1 меньше, чем соответствующие примыкающие радиусы элемента рамы 105 и поэтому на этих поверхностях нет контакта и не происходит передачи нагрузок.
В соответствии с настоящим изобретением предусмотрен опорный подшипник для совершающего нутационное движение элемента, имеющего ось нутации, который под воздействием подшипника совершает нутационное движение вокруг стационарной оси, пересекающейся с осью нутации в точке симметрии нутации, причем указанный подшипник включает две пары опорных поверхностей, каждая пара которых содержит неподвижную опорную поверхность, расположенную на неподвижном опорном элементе, и совершающую нутационное движение опорную поверхность, расположенную на совершающем нутационное движение элементе, причем каждая неподвижная опорная поверхность выполнена с возможностью контакта с соответствующей совершающей нутационное движение опорной поверхностью в плоскости, содержащей стационарную ось и ось нутации, при этом каждая пара опорных поверхностей описывает дополнительные траектории контакта в форме окружности на соответствующих поверхностях, а дополнительные траектории контакта в каждой из пар опорных поверхностей имеют, по существу, равные отношения средней длины траектории на неподвижной опорной поверхности к средней длине траектории на соответствующей совершающей нутационное движение опорной поверхности.
На практике было обнаружено, что отношение длины траектории на неподвижных опорных поверхностях к длине траектории на соответствующих поверхностях совершающего нутационное движение элемента, измеренных по средним линиям зон контакта, должно находиться в пределах 0,8% и, предпочтительно, должно находиться в пределах 0,4%. Значения вне этих пределов связаны с высоким скольжением на контактных поверхностях с соответствующими чрезмерным износом и расходом энергии.
В одном варианте осуществления изобретения предусмотрены средства для того, чтобы удержать элемент, совершающий нутационное движение, от вращения с траекторией в виде сетки вокруг его оси нутации относительно неподвижного элемента рамы. В этом конструктивном исполнении отношение длин траекторий в каждой из пар дополняющих траекторий контакта поддерживается, по существу, равным единице. Нутационное движение элемента без вращения требуется не для всех рассматриваемых применений машины, совершающей нутационное движение. Например, при применениях в инерционных вибрационных приводных механизмах может быть целесообразно некоторое проскальзывание при вращении совершающего нутационное движение элемента вокруг стационарной оси для того, чтобы свести к минимуму износ опорных поверхностей и равномерно распределить этот износ,
В другом варианте осуществления изобретения совершающий нутационное движение элемент не удерживается от вращения вокруг его оси нутации. В этом изобретении отношение длин траекторий каждой пары дополняющих траекторий контакта может отличаться от единицы, при этом обеспечивается, что это отношение поддерживается по существу постоянным, как заранее определенное, для всех пар траекторий контакта. Совершающий нутационное движение элемент совершает вращение с траекторией в виде сетки относительно его оси нутации, прямо пропорциональное отклонение от единицы отношений длин траекторий контакта на опорных поверхностях. Если все отношения траекторий контакта равны, совершающий нутационное движение элемент катится по элементу рамы на опорных поверхностях контакта, при этом отсутствует скольжение. Если отношения траекторий контакта на опорных поверхностях не равны, имеет место скольжение на всех поверхностях контакта с соответствующими износом и расходом энергии.
В вариантах осуществления изобретения, описанных здесь, дополнительные опорные поверхности частично сферической формы, имеющие непригнанный радиальный зазор, предусмотрены на неподвижном опорном элементе и совершающем нутационное движение элементе симметрично относительно точки симметрии нутации, под воздействием которых элемент совершает нутационное движение.
В одном варианте осуществления по изобретению опорный подшипник включает первую пару контактных опорных поверхностей, имеющих пригнанные друг к другу вогнутый и выпуклый профили в радиальной плоскости, содержащей стационарную ось и ось нутации совершающего нутационное движениe элемента, причем указанные вогнутый и выпуклый профили имеют точно пригнанную кривизну в областях их контакта, и вторую пару опорных поверхностей контакта, имеющую пригнанные друг к другу профили по существу конической формы.
В другом варианте осуществления изобретения опорный подшипник включает две примыкающие пары опорных поверхностей контакта, имеющих пригнанные друг к другу вогнутый и выпуклый профили в радиальной плоскости, содержащей стационарную ось и ось симметрии совершающего нутационное движение элемента, и третью пару опорных поверхностей контакта, имеющих пригнанные друг к другу профили по существу конической формы.
В вариантах осуществления, описанных выше, по существу коническая форма опорных поверхностей может включать углы раствора конуса больших величин, включая в крайнем случае 180o, что также охватывает плоскую поверхность.
Несмотря на то, что диапазон изобретения может охватывать любые другие формы, одна предпочтительная форма изобретения будет описана со ссылкой на. прилагаемые чертежи, на которых:
фиг. 1 изображает осевое сечение по стационарной оси машины, совершающей нутационное движение, по известному уровню техники, на которую дана предварительная ссылка;
фиг. 2 - осевое сечение по стационарной оси одного конструктивного исполнения по изобретению, содержащего машину для высокоинтенсивного измельчения;
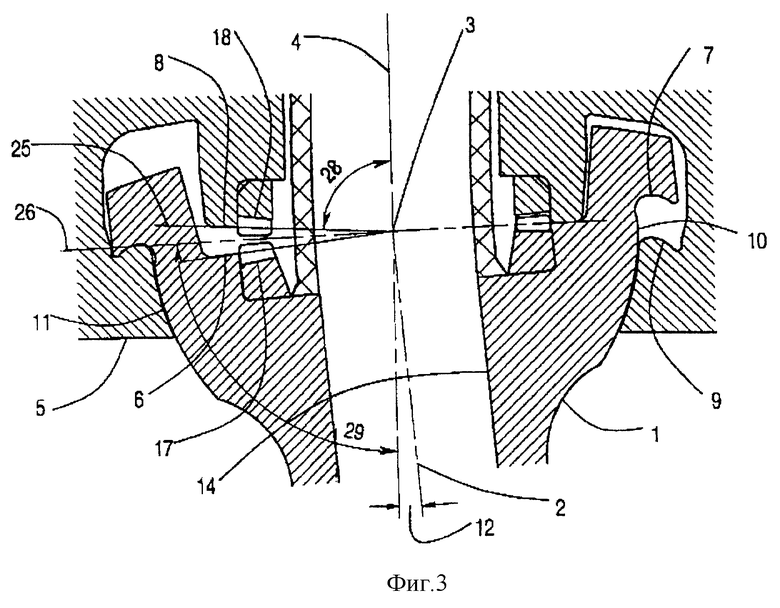
фиг. 3 - увеличенный вид опорного подшипника, образующего часть машины, показанной на фиг. 2;
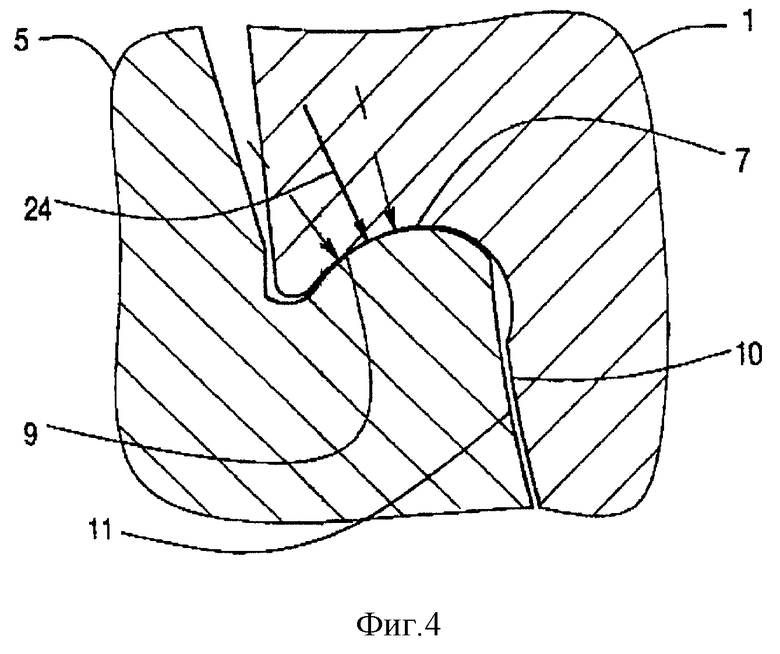
фиг. 4 - увеличенный вид пригнанных друг к другу вогнутой и выпуклой опорных поверхностей, образующих часть подшипника, показанного на фиг. 3, в котором опорные поверхности имеют один точечный контакт;
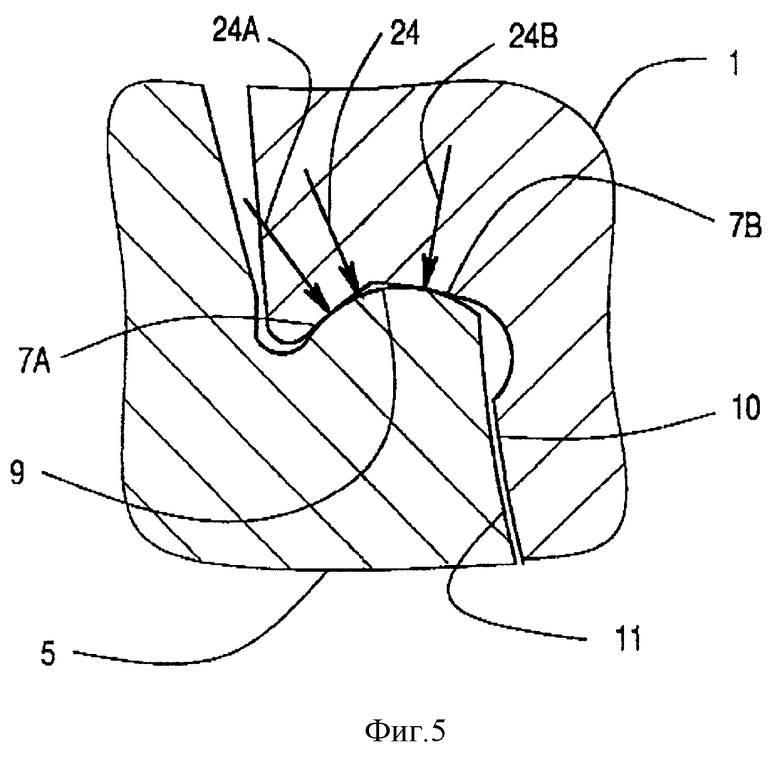
фиг. 5 - альтернативное конструктивное исполнение пригнанных друг к другу вогнутой и выпуклой опорных поверхностей, показанных на фиг. 3, в котором опорные поверхности имеют два точечных контакта;
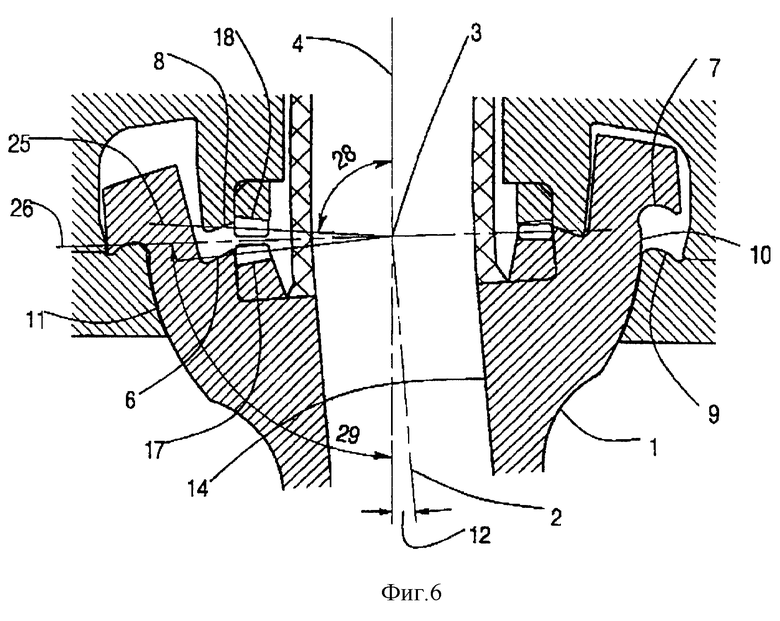
фиг. 6 - дополнительное конструктивное исполнение опорного подшипника, показанного на фиг. 3, на котором показана альтернативная геометрия пригнанных друг к другу конических опорных поверхностей;
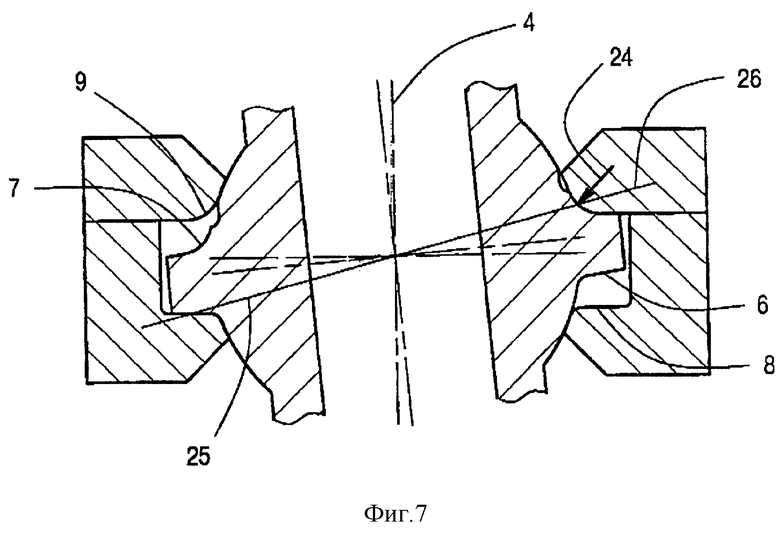
фиг. 7 - другое конструктивное исполнение опорного подшипника, показанного на фиг. 3;
Способы осуществления изобретения
На фиг. 2 показана машина для высокоинтенсивного измельчения, содержащая относительно стационарную ось вращения4, которая отклонена под углом 12 от оси симметрии нутации 2, пересекающей ось 4 в точке симметрии нутации 3; совершающий нутационное движение узел 1, включающий помольную камеру 13 и проход для исходного материала 14, симметричный относительно оси 2, разгрузочную решетку 15, подводящий приводной вал 16, который предназначен для приведения помольной камеры 13 в нутационное движение вокруг относительно стационарной оси вращения 4, и опорные средства, содержащие элемент или элементы рамы 5, приспособленные для создания опоры помольной камеры и для передачи сил и моментов, создаваемых при его работе, на соответствующие фундаменты. В этом конструктивном исполнении вращение совершающего нутационное движение узла 1 вокруг оси симметрии нутации 2 предотвращается крутящим удерживающим механизмом, содержащим совершающее нутационное движение коническое зубчатое колесо 17, прикрепленное к совершающему нутационное движение узлу 1, которое входит в зацепление с неподвижным коническим зубчатым колесом 18, прикрепленным к элементу рамы 5. Совершающий нутационное движение проход для исходного материала 14 соединен с элементом рамы 5, а отсюда с отверстием для исходного материала 19 на его верхнем конце.
При работе машины, показанной на фиг. 2, подводящий приводной вал 16 приводится во вращательное движение, которое преобразуется в нутационное движение помольной камеры 13 посредством промежуточного приводного механизма (не показан). Твердые частицы исходного материала 20 подаются в отверстие для подачи 19, откуда они под действием силы тяжести движутся через проход для исходного материала 14 в помольную камеру 13. Частицы исходного материала взаимодействуют со свободными мелющими телами 21 и постепенно измельчаются до частиц более мелких фракций. Фракции измельченных исходных частиц 20 выгружаются из помольной камеры 13 через отверстия в решетке 15.
Совершающий нутационное движение узел 1 по фиг. 2 размещен вокруг оси вращения 4 и приводится в заданное нутационное движение вокруг этой оси в результате непрерывного контакта качения поверхностей 6, 8 и 7, 9 совершающего нутационное движение подшипника, показанного на фиг. 3 и 4. Совершающий нутационное движение узел 1 эксцентрично опирается на пары дополняющих опорных поверхностей 6, 8 и 7, 9 по отношению к его центроиде 23, причем неподвижные опорные поверхности 8 и 9 симметрично расположены вокруг противоположных крайних точек стационарной оси 4 относительно точки симметрии нутации 3. Геометрия подшипника имеет такую конфигурацию, которая дает возможность соответствующим дополняющим опорным поверхностям 7 и 9 передать силы реакции, направленные перпендикулярно стационарной оси 4, от элемента 1 на элемент 5 в плоскости, содержащей ось симметрии совершающего нутационное движение элемента 2 и стационарную ось 4.
Использование и работа предлагаемого подшипника
Совершающий нутационное движение узел 1 на фиг. 2 размещен вокруг оси вращения 4 и приводится в заданное нутационное движение вокруг этой оси в результате непрерывного контакта качения между двумя парами контактирующих опорных поверхностей на совершающем нутационное движение узле 1 и элементе рамы 5. Нутационное движение, в которое приводится совершающий нутационное движение узел 1, осуществляется под воздействием совершающей нутационное движение тороидальной опорной поверхности 1, которая катится по противолежащей неподвижной тороидальной опорной поверхности 9 на элементе рамы 5, и совершающей нутационное движение конической опорной поверхности 6, которая катится по противолежащей неподвижной конической опорной поверхности 8 на элементе рамы 5. Опорные поверхности 6 и 8 могут быть выпуклыми, чтобы компенсировать ошибки несоосности путем приближения конических опорных поверхностей к выпуклым профилям с большим радиусом.
В конструктивном исполнении, показанном на фиг. 2 и 3, в котором совершающий нутационное движение узел 1 удерживается от вращения вокруг его оси 2, каждая группа траекторий контакта, которые описываются дополняющими парами опорных поверхностей 7, 9 и 6, 8 соответственно, имеет общую длину траектории, отличную от длины траектории другой пары, так что поверхности катятся без скольжения, чему соответствуют низкие потери на трение и минимальный износ. Две пары дополняющих траекторий контакта не должны приводиться к одинаковому размеру и могут значительно различаться по длине соответствующих траекторий, обеспечивая при этом, чтобы длины траекторий внутри каждой пары опорных поверхностей были одинаковыми. В некоторых других конструктивных исполнениях изобретения вращение совершающего нутационное движение узла 1 вокруг его оси симметрии 2 может допускаться. В этом случае равенство длин траекторий в траекториях пар контакта, которое создается дополняющими парами опорных поверхностей 7, 9 и 6, 8, несущественно. Недостаточное совпадение длин траекторий контакта приводит к тому, что совершающий нутационное движение узел 1 приводится во вращение вокруг его оси симметрии 2 силами трения, действующими на поверхностях контакта. Скольжение при вращении поверхностей контакта 7 и 6 по поверхностям 9 и 8 соответственно служит для равномерного распределения износа от трения по поверхностям контакта. В тех случаях, когда скольжение по поверхностям контакта допустимо, проскальзывание на поверхностях контакта, расход энергии и износ опорных поверхностей 6, 7, 8 и 9 сводятся к минимуму путем обеспечения равного отношения длины траектории контакта на неподвижных опорных поверхностях 9 и 8 и на соответствующих совершающих нутационное движение опорных поверхностях 7 и 6 соответственно, которое определяется следующим образом:
L9/L7 = sin(угол 29)/sin(угол 29 + угол 12) = L8/L6 = sin(угол 28)/sin (угол 28 + угол 12),
где L7 - длина траектории контакта, описываемой на опорной поверхности 7 и т. п. Это требование удовлетворяется, когда зоны контакта неподвижных опорных поверхностей 8 и 9 лежат на воображаемых прямых круговых конических поверхностях 25 и 26 соответственно, которые имеют оси, совпадающие со стационарной осью 4, имеют вершины в точке симметрии нутации 3, расположены около противоположных крайних точек стационарной оси 4 относительно точки симметрии нутации 3 и имеют равные половины углов раствора конуса 28 и 29 соответственно. Данный случай, когда проскальзывание при вращении совершающего нутационное движение узла 1 относительно узла рамы 5 не допускается, как в конструктивном исполнении, показанном на фиг. 2, представляет конкретный случай вышеупомянутого отношения для длины траектории контакта, где
L7= L9 и L6= L8
Это требование удовлетворяется, когда половины углов раствора конусов 28 и 29 гипотетических прямых круговых конических поверхностей 25 и 26 имеют значения, определяемые следующим образом:
угол 28 = угол 29 = 90o - 0,5 * угол 12
Динамическое воздействие совершающего нутационное движение узла 1, который совершает движение вокруг стационарной оси 4, может быть представлено как реакция инерционной силы 22, которая является результатом воздействия центробежного ускорения, которое действует через центроиду 23 совершающего нутационное движение узла 1 и направлено радиально от стационарной оси 4. Как показано на фиг. 2, динамическая сила 22 передается от совершающего нутационное движение узла 1 к элементу рамы 5 на дополняющие опорные поверхности 7, 9 и 6, 8. Эксцентриситет силы 22 по отношению к опорным поверхностям 7 и 9, и 6 и 8 приводит к передаче момента пары сил на элемент рамы 5 в дополнение к силе 22 в форме сил реакции, приложенных к опорным поверхностям 8 и 9. Дополняющие опорные поверхности 7 и 9 содержат профили вогнутой и выпуклой формы на радиальном участке, имеющем точно пригнанный радиус кривизны, как показано на фиг. 4. В соответствии с геометрией этого участка, точка контакта опорных поверхностей 7 и 9 может перемещаться на существенное радиальное расстояние относительно стационарной оси 4, как показано на фиг. 4, с соответственно большим изменением угла наклона вектора 24, перпендикулярного к опорным поверхностям в точке контакта, посредством небольшого радиального смещения совершающего нутационное движение узла 1 относительно стационарной оси 4. Вектор 24 соответствует направлению результирующей силы реакции, передаваемой от совершающего нутационное движение узла 1 на элемент рамы 5 через опорные поверхности 7 и 9. Допустимый диапазон угла наклона вектора 24 дает возможность по существу передавать инерционную силу 22 элементу рамы 5 через выпуклую опорную поверхность 9, причем на коническую опорную поверхность 8 передается главным образом момент сил, который является результатом эксцентриситета силы 22. Величина инерционной силы 22 постепенно изменяется с увеличением срока службы помольной камеры 13, так как ее вес уменьшается в связи с абразивным износом. Соответственно зона контакта опорных поверхностей 7 и 9 непрерывно регулируется путем небольшого радиального смещения совершающего нутационное движение узла 1, чтобы сохранить совпадение результирующей силы реакции в этой точке контакта и перпендикулярного к поверхности вектора 24.
На фиг. 5 показано другое конструктивное исполнение изобретения, показанного на фиг. 3, в котором пригнанные друг к другу вогнутая и выпуклая опорные поверхности образуют контакт в двух точках вместо контакта в одной точке, характерного для фиг. 3. В этом конструктивном исполнении привод нутационного движения снабжен двумя вогнутыми опорными поверхностями 7А и 7В, которые создают контакт качения с дополняющей выпуклой опорной поверхностью 9. Силы передаются от привода нутационного движения 1 к раме 5 в точках контакта опорных поверхностей, как показано посредством векторов сил 24А и 24В. Суммарный эффект от этих двух сил реакции показан в виде результирующего вектора силы 24. Из фиг. 5 очевидно, что наклон вектора силы 24 может изменяться в широком диапазоне путем изменения компонентов силы 24А и 24В, причем не требуется никакого радиального смещения совершающего нутационное движение узла 1, как описано выше для подшипника, показанного на фиг. 4.
Опорная поверхность 10 совершающего нутационное движение узла 1, в основном сферической формы, входит в зацепление с дополняющей поверхностью 11 на элементе рамы 5, что обеспечивает центральное размещение совершающего нутационное движение узла 1 вокруг точки симметрии нутации 3 в направлении, перпендикулярном плоскости фиг. 2 и 3, и передает силы реакции от совершающего нутационное движение узла 1 на элемент рамы 5 в этом направлении. Размещение совершающего нутационное движение узла 1 в плоскости фиг. 2 и 3, содержащей оси 2 и 4, обеспечивается зацеплением пар опорных поверхностей 6, 8 и 7, 9. Мощность передается от совершающего нутационное движение узла 1 свободным мелющим телам 21 в камере 13, когда камера приводится в нутационное движение вокруг стационарной оси 4. Передача мощности осуществляется через силу взаимодействия между свободными мелющими телами 21 и стенкой помольной камеры 13, направленной радиально к стационарной оси 4, но в плоскости, смещенной около стационарной оси 1 от плоскости фиг. 2 и 3. В соответствии со смещением мощности, соответствующей силе взаимодействия, из плоскости фиг. 2 и 3, составляющая силы, перпендикулярная этой плоскости, не может быть передана на элемент рамы 5 через опорные поверхности 7 и 9 и дополняющие опорные поверхности 10 и 11 на совершающем нутационное движение узле 1 и элементе рамы 5 соответственно, или по существу сферическая форма вокруг точки симметрии нутации 3, предусмотрены для этой цели. По существу радиальный зазор предусмотрен между поверхностями реакции 10 и 11 для того, чтобы обеспечить малую величину радиального смещения совершающего нутационное движение узла 1 в плоскости фиг. 2 и 3, предотвращая контакт этих поверхностей.
В другом варианте осуществления изобретения, как показано на фиг. 6, геометрия одной пары дополняющих опорных поверхностей изменена, для того, чтобы изменить соотношение распределения нагрузок от инерционной силы 22 между двумя группами опорных поверхностей 7, 9 и 6, 8. В конструктивном исполнении, показанном на фиг. 6, вершина по существу конических опорных поверхностей 6 и 8 смещена от точки симметрии нутации 3. Путем соответствующего выбора угла конических опорных поверхностей 6 и 8 соотношение инерционной силы 22, передаваемой от совершающего нутационное движение узла 1 на элемент рамы 5, на этих контактных поверхностях можно регулировать для достижения максимальной нагрузки на машину. Хотя результатом наклона опорных поверхностей 6 и 8 в этом конструктивном исполнении является то, что их профили отличны от гипотетической конической поверхности 25, средняя точка зоны их контакта остается по существу примыкающей к поверхности 25. Результат этого конструктивного исполнения заключается в уменьшении радиального компонента силы реакции на опорных поверхностях 7 и 9 для заданной величины силы 22 и в уменьшении угла наклона вектора силы 24 к стационарной оси 4. Это уменьшает эксцентриситет нагрузки, передаваемой на опорную поверхность 7, и вследствие этого уровень нагрузки на участке этой поверхности, который является результатом изгибающих эффектов, соответственно уменьшается.
На фиг. 7 показан следующий вариант осуществления опорного подшипника, показанного на фиг. 3. Нутационное движение под воздействием совершающего нутационное движение элемента 1 обеспечивается тороидальной опорной поверхностью 7, которая катится по противолежащей неподвижной тороидальной опорной поверхности 9 на элементе рамы 5, и совершающей нутационное движение конической опорной поверхностью 6, которая катится по противолежащей неподвижной конической или плоской опорной поверхности 8 элемента рамы 5. Опорные поверхности 7 и 9 входят в зацепление по существу с линейным контактом с опорными поверхностями, имеющими по существу равные радиусы кривизны в плоскости фигуры. Точка приложения силы опорной реакции 24 может изменяться по всей опорной поверхности 7 для того, чтобы угловая ориентация силы реакции совпадала с вектором, перпендикулярным к поверхности в точке приложения силы. Этот подшипник удобен только в том случае, когда траектория в виде сетки совершающего вращательное нутационное движение элемента 1 может быть допустима в соответствии с геометрическими ограничениями, которые налагаются расположением опорных поверхностей 6 и 7 на совершающем нутационное движение элементе 1. Износ и затраты энергии сводятся к минимуму путем обеспечения по существу равного отношения длины траектории контакта на неподвижных опорных поверхностях 8 и 9 к длине траектории контакта на соответствующих поверхностях 6 и 7 совершающего нутационное движение элемента 1. Это требование удовлетворяется путем обеспечения равных углов наклона воображаемых линий контакта 25 и 26 относительно стационарной оси 4.
Таким образом, опорный подшипник для машины, совершающей нутационное движение, выполнен в относительно простой, компактной форме и обеспечивает низкие потери энергии, а также может продолжать работать надежно и эффективно, даже если имеет место постепенный износ опорных поверхностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежная дробилка | 1986 |
|
SU1704616A3 |
| Станок для пробивки в ленте отверстий и последующей намотки ее в рулон | 1979 |
|
SU1114322A3 |
| ДОЗИРОВАНИЕ И ЗАПОЛНЕНИЕ МОЛОТОГО КОФЕ | 2020 |
|
RU2807547C2 |
| ПОВОРОТНЫЙ ПОДШИПНИК | 1996 |
|
RU2137217C1 |
| ГИРОСКОПИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2295705C2 |
| СТАНОК ДЛЯ ОБРАБОТКИ ДОЛБЛЕНИЕМ ГЛУХИХ ПАЗОВ | 1991 |
|
RU2071875C1 |
| СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ ПАЗОВ В ОТВЕРСТИИ ДЕТАЛИ | 1992 |
|
RU2088385C1 |
| САМОВЫРАВНИВАЮЩИЙСЯ ПРИВОД С ВИРТУАЛЬНЫМ ЭЛЛИПСОМ | 2018 |
|
RU2753017C1 |
| МЕЛЬНИЦА И СПОСОБ РАЗМАЛЫВАНИЯ | 2008 |
|
RU2471562C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫПОЛНЕНИЯ ПРОФИЛЯ КРАЕВ ВХОДНОГО ВАЛА ПОВОРОТНОГО ЗОЛОТНИКА | 1993 |
|
RU2110390C1 |
Опорный подшипник для совершающего нутационное движение элемента, такого как устройство для измельчения высокой интенсивности, в котором опорный подшипник снабжен парами опорных поверхностей качения, такими что каждая пара дополняющих траекторий контакта, которые описываются парами опорных поверхностей, имеет одинаковое отношение длины траектории на неподвижной опорной поверхности к длине траектории на совершающей нутационное движение опорной поверхности. Изобретение обеспечивает надежность и эффективность работы при низких потерях энергии. 14 з. п. ф-лы, 7 ил.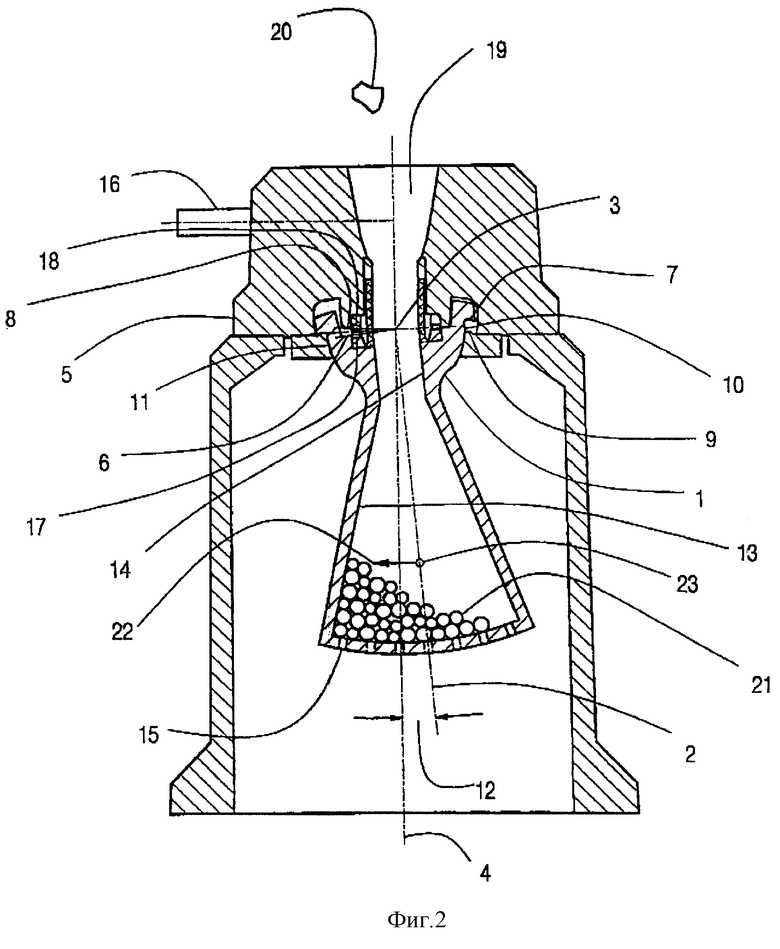
| Устройство для контроля параметров | 1975 |
|
SU568949A1 |
| УЗЕЛ ВАЛКА | 1991 |
|
RU2038880C1 |
| ВИБРАЦИОННАЯ МЕЛЬНИЦА | 0 |
|
SU268151A1 |
| СОЕДИНИТЕЛЬНЫЙ УЗЕЛ ДЛЯ МЕБЕЛИ | 2012 |
|
RU2608696C2 |
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| СВЕЧА ЗАЖИГАНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2043683C1 |
| DE 3412276 А1, 15.11.1984 | |||
| Способ изготовления тонкостенных обшивок двойной кривизны | 1972 |
|
SU441995A1 |

