Изобретение относится к авиационной технике и может использоваться при создании скоростных летательных аппаратов вертикального взлета и посадки типа конвертоплан на базе подъемно-несущей схемы вертолетов с продольным расположением несущих винтов.
Известны комбинированные вертолеты, относящиеся к категории конвертопланов, например «Ротодайн» США и КА-22 Россия, которые содержат основные конструктивные узлы вертолета - двигательную установку с редуктором и несущие винты. Кроме того, они снабжены аэродинамическими плоскостями крыльев и тянущими винтами, имеющими привод от основного или вспомогательных двигателей. Взлет и посадку они производят как вертолет, используя подъемную силу несущих винтов, а в горизонтальном полете несущие винты работают в режиме авторотации за счет тяги тянущих винтов. При этом плоскости крыльев существенно разгружают несущие винты, что дает возможность увеличить скорость горизонтального полета до 400 км/час.
Однако дальнейшее повышение их скорости полета ограничивается значительным сопротивлением встречному потоку воздуха «наступающих» лопастей и снижением подъемной силы «отступающих» лопастей несущих винтов. Кроме того, конструкция существующих конвертопланов получается довольно сложной и громоздкой из-за наличия большого числа промежуточных звеньев в механической трансмиссии, передающей крутящий момент к тянущим винтам (П.Бауэрс, Летательные аппараты нетрадиционных схем. М., Мир, 1991 г., стр.211).
Известен летательный аппарат вертикального взлета и посадки, включающий установленные на валу корпус, состоящий из двух частей, кабину, два несущих винта, двигатели, посадочное устройство и систему управления. Несущие винты вращаются в противоположных направлениях и установлены на валу один за другим, вал разделен на части сателлитами для его стабилизации, кабина закреплена на верхней части вала, выступая над корпусом, лопасти верхнего винта прямые и их наружные концы подвижно скреплены между собой плоским горизонтальным кольцом, образуя верхнюю открытую часть корпуса, а нижний винт расположен в корпусе и наружные части его лопастей скреплены по кольцу вертикальной полосой, верхняя и нижняя части корпуса жестко скреплены, а в щелевых отверстиях между ними расположены лепестки управления.
В данном летательном аппарате технический результат повышения горизонтальной скорости полета также не достигается, несмотря на наличие двух двигателей, которые при работе создают повышенный шум и вибрации, обусловленные эффектом «биения» приводных валов с различными скоростями вращения (Патент №36345 на полезную модель «Летательный аппарат вертикального взлета и посадки», В64С 27/00, В64С 29/00, 2003 г., опубл. 10.03.2004 г.).
Наиболее близким по технической сущности к предлагаемому изобретению является беспилотный летательный аппарат, содержащий фюзеляж, шасси, несущие аэродинамические поверхности, закрепленные на передней части фюзеляжа, привод вентиляторных установок, установленных за указанными поверхностями параллельно друг другу, которые состоят из винта в кольце со спрямляющим устройством и отклоняющими дефлекторами. Входной диаметр вентиляторных установок равен размаху передних аэродинамических поверхностей, а размещены они в средней части фюзеляжа, выполненного в виде несущего крыла, боковые стенки которого образованы вогнутыми поверхностями, частично охватывающими вентиляторные установки. В кормовой части фюзеляжа дополнительно установлена омываемая истекающим из вентиляторных установок потоком воздуха цельноповоротная несущая аэродинамическая поверхность, на внешних кромках которой закреплены вертикальные рули направления (Патент №2209746 на изобретение «Летательный аппарат», B64D 27/02, В64С 9/08, опубл. 10.08.2003 г.).
Недостатком такого летательного аппарата является сложная и недостаточно эффективная конструкция вентиляторных установок, в случае отказа которых он не может безопасно спланировать и приземлиться без парашюта, что ограничивает их применение областью беспилотных летательных аппаратов.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении универсальности и эффективности летательного аппарата - разработка универсальной конструкции летательного аппарата с небольшим крылом, обладающего высокой скоростью и дальностью горизонтального полета при возможности вертикального взлета и посадки с малых площадок и безопасной посадки с отказавшим приводом винтов.
Технический результат достигается тем, что в универсальном летательном аппарате, содержащем фюзеляж с боковым профилем несущего крыла, колесным шасси и приводом двух винтов, управляемые аэродинамические поверхности вертикального руля и горизонтального оперения, закрепленные на передней части фюзеляжа, боковые стенки которого образованы вогнутыми поверхностями в его средней части с несущим крылом, а в кормовой части фюзеляжа установлена обдуваемая в полете воздушным потоком винтов V-образная аэродинамическая поверхность с управляемыми закрылками стабилизатора, новым является то, что привод кормового реверсируемого винта имеет общий продольный вал, кинематически соединяющий его с передним тянущим винтом, радиус вращения которого меньше высоты Т-образного несущего крыла «верхнеплана», снабженного опущенными законцовками, установленными с возможностью управляемого поворота в пределах 90 градусов, как и верхний киль Т-образного крыла, установленный на горизонтальной оси в верхней части фюзеляжа.
Кормовой винт постоянного шага соединен с передним оппозитным винтом и общим приводным валом через реверс-редуктор, вариатор и муфту сцепления.
Кормовой винт регулируемого шага соединен с общим приводным валом и передним оппозитным винтом через реверс-редуктор и муфту сцепления.
Кормовая аэродинамическая поверхность с закрылками стабилизатора выполнена по схеме «низкоплан» типа обратное V и снабжена заднеприводными колесами шасси, как и передний поворотный руль, закрепленный на нижней части фюзеляжа.
В горизонтальном плане кромки Т-образного крыла образованы двумя гиперболами с эксцентриситетом задней гиперболы больше, чем у передней.
В предлагаемом универсальном летательном аппарате формируется нисходящий воздушный поток с управляемым вектором тяги при помощи двух оппозитных и пуш-пульно работающих винтов с общим приводом, расположенных в передней и кормовой части фюзеляжа, и Т-образного крыла с опущенными законцовками, установленными в средней части «приталенного» фюзеляжа с возможностью управляемого поворота в пределах 90 градусов, как и верхний киль Т-образного крыла.
Сравнение заявленного технического решения с уровнем техники по научно-технической и патентной документации в основной и смежных рубриках показывает, что совокупность существенных признаков заявляемого решения не была известна, следовательно, предложенная схема и конструкция вертолета соответствуют условию патентоспособности - критерию «новизна».
Анализ известных технических решений в данной области техники также показал, что предложенное техническое решение имеет признаки, которые отсутствуют в известных устройствах, а использование их в заявленной совокупности признаков дает возможность получить новый технический эффект, следовательно, предложенное техническое решение обладает и изобретательским уровнем.
Разработанные математические модели предложенного устройства и его виртуальная компьютерная продувка показывают, что предложенное техническое решение может быть изготовлено промышленным способом, работоспособно, осуществимо и воспроизводимо, следовательно, соответствует условию патентоспособности - промышленная применимость.
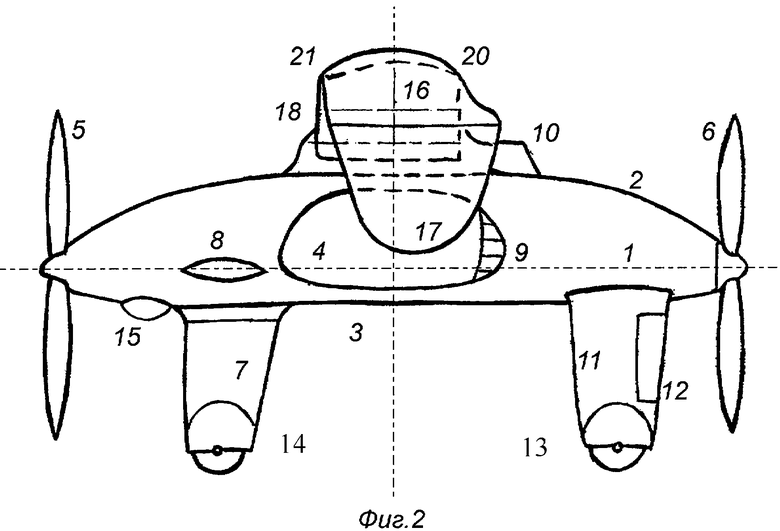
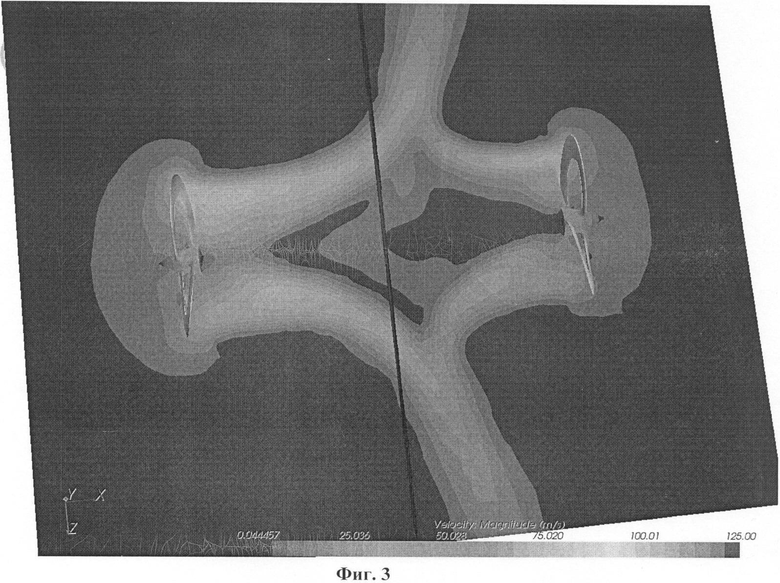
Сущность изобретения поясняется на фиг.1 - фиг.3, где фиг.1 - боковая проекция летательного аппарата; фиг.2 - вид спереди; фиг.3 - скалярное поле скоростей потока воздуха у пуш-пульно работающих оппозитных винтов.
Предлагаемый универсальный летательный аппарат «Пуш-пулет» содержит фюзеляж 1, выполненный с профилем несущего крыла, имеющего выпуклую верхнюю поверхность 2, более плоскую нижнюю поверхность 3 и боковые стенки 4, образованные в средней части фюзеляжа вогнутыми во внутрь цилиндрическими или коническими поверхностями, которые придают фюзеляжу «приталенный» вид. Фюзеляж 1 снабжен внутренним механическим приводом (двигателем внутреннего сгорания) двух воздушных винтов 5 и 6, расположенных в его передней и кормовой оконечностях, между которыми установлены управляемые аэродинамические поверхности вертикального руля 7 и переднего горизонтального оперения 8. В кормовой части фюзеляжа имеется воздухозаборник 9 внутреннего привода и его выхлопное отверстие 10, а также установлена обдуваемая воздушным потоком винтов аэродинамическая поверхность 11 «низкоплана» в виде перевернутого V с закрылками стабилизатора 12 и заднеприводными колесами неубирающееся шасси 13, у которого переднее рулевое колесо 14 установлено на вертикальном руле 7, расположенном позади навигационного обтекателя 15. В средней части фюзеляжа 1 над его вогнутыми поверхностями 4 установлено Т-образное крыло «верхнеплана» 16 с опущенными законцовками 17, способными поворачиваться на угол α в пределах 90 градусов, как и вертикальный киль 18 Т-образного крыла, установленного на продольной горизонтальной оси 19 в верхней части фюзеляжа под углом γ так, что его высота Н над приводным валом больше радиуса вращения винтов R.
В горизонтальном плане кромки крыла 16 образованы двумя гиперболами с эксцентриситетом задней гиперболы 20 больше, чем у передней 21. Передний носовой тянущий винт постоянного шага 5 кинематически соединен с таким же, но реверсируемым кормовым винтом 6 через общий приводной вал, проходящий вдоль всего фюзеляжа 1, реверс-редуктор, вариатор и муфту сцепления, которые находятся внутри фюзеляжа и на чертеже не показаны.
Вместо вариатора может использоваться кормовой винт 6 регулируемого шага, способный работать в реверсивном режиме «тяни-толкай», по-английски - «пуш-пуль», что и предлагается использовать для квалификационного названия такого летательного аппарата как «пуш-пулет».
Работа предложенного устройства основана на взаимодействии встречных потоков оппозитных винтов, переднего 5 и кормового 6, которые при вертикальном взлете или посаде создают единый радиально расходящийся поток воздуха в вертикальной плоскости в виде тонкого диска или конической воронки, если мощности этих потоков различны (фиг.3). При этом радиально расходящийся воздушный поток своей нижней частью упирается в землю, а верхней - в Т-образное крыло 16 с опущенными под углом законцовками 17, которые преобразуют боковые части расходящегося потока в нисходящие потоки воздуха. Аэродинамическая реакция результирующего потока воздуха создает на правой и левой половинках крыла 16 соответствующие компоненты подъемной силы P1 и Р2, которые определяют скорость вертикального подъема летательного аппарата и его бокового перемещения в зависимости от угла наклона всего Т-образного крыла 16 вместе с его вертикальным килем 18.
В режиме вертикального взлета и зависания балансировка по тангажу и крену обеспечивается передним горизонтальным оперением 8 за счет их синфазного или противофазного поворота и закрылками стабилизатора 12 кормовой V-образной аэродинамической поверхности 11, а по курсу - вертикальным рулем 7. Все эти поверхности интенсивно обдуваются винтами 5 и 6 и поэтому эффективно управляются электрическим или гидравлическим приводом любого типа.
Переход от вертикального движения в горизонтальный режим полета происходит за счет плавного перераспределения мощности привода между передним 5 и кормовым 6 винтами при помощи вариатора или поворота лопастей кормового винта регулируемого шага. При этом радиально расходящийся воздушный поток в середине фюзеляжа 1 превращается в тупой конус, который пересекается с горизонтальной плоскостью Т-образного крыла 16 по гиперболам с различным эксцентриситетом для передней 21 и задней 20 кромок этого крыла.
После горизонтального разгона управление летательным аппаратом происходит по-«самолетному», так как набегающий поток воздуха достаточно эффективно создает подъемную силу на всех его аэродинамических поверхностях, что позволяет просто отключить муфтой сцепления привода кормовой винт 6, который при свободном вращении играет роль дополнительного стабилизатора полета, или перевести его в толкающий режим для форсированного увеличения скорости и высоты полета. При этом законцовки 17 Т-образного крыла 16 устанавливаются в горизонтальное положение, обеспечивающее максимальный размах крыла, который необходим и для безопасного планирования в случае отказа механического привода винтов 5 и 6. Таким образом, взлет и посадку предлагаемый летательный аппарат может совершать и по-«самолетному» с ультракоротким пробегом и разгоном при помощи приводных колес шасси, рулевое колесо которого позволяет в наземном положении пользоваться этим аппаратом как обычным автомобилем.
Благодаря горизонтальному расположению осей тянитолкающих винтов у предлагаемого аппарата принципиально отсутствует разница между «наступающими и отступающими» лопастями винтов, которые выполняют и функции несущих винтов с одним общим приводом. Следовательно, при прочих равных условиях скорость горизонтального полета и эффективность активного управления на всех режимах полета предлагаемого вертолета будет значительно выше, чем у аналогов, поскольку схема управления вектором тяги воздушного потока получается гораздо проще, удобнее и дешевле в эксплуатации, чем громоздкие и сложные автоматы перекоса лопастей несущих винтов у существующих вертолетов или дефлекторов прототипа. Поэтому данный летательный аппарат можно без серьезных проблем изготовить с применением известных технологий и конструкций «самолетных» винтов как в единичном производстве, так и малыми сериями на любом авиационном предприятии.
Таким образом, предложенный летательный аппарат имеет повышенную стабильность вертикального взлета и посадки, безопасность планирования с отключенным приводом винтов, а также имеет увеличенные дальность и скорость горизонтального полета за счет исключения вредного эффекта «наступающих и отступающих» лопастей несущих винтов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ (ВАРИАНТЫ) | 2009 |
|
RU2397919C1 |
| КОНВЕРТОЛЕТ | 2008 |
|
RU2369525C2 |
| ДВИЖИТЕЛЬНАЯ СИСТЕМА ВЫСОКОСКОРОСТНОГО ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2015 |
|
RU2629635C2 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| СКОРОСТНОЙ ВИНТОКРЫЛ-АМФИБИЯ | 2016 |
|
RU2627965C1 |
| БЕСПИЛОТНЫЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2012 |
|
RU2502641C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2212358C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2636826C1 |
Изобретение относится к авиационной технике. Летательный аппарат выполнен с оппозитным расположением винтов с горизонтальными осями вращения на передней и кормовой оконечностях фюзеляжа, боковые стенки которого образованы вогнутыми поверхностями в средней части под Т-образным крылом с опущенными законцовками, установленными с возможностью управляемого поворота в пределах 90 градусов. В передней части фюзеляжа размещены аэродинамические поверхности горизонтального оперения и низкорасположенного вертикального руля. В кормовой части фюзеляжа размещены аэродинамические поверхности в виде перевернутого V с управляемыми закрылками стабилизатора и заднеприводными колесами неубирающегося шасси. Кормовой реверсируемый винт постоянного шага и передний винт могут быть соединены с общим приводным валом через реверс-редуктор, вариатор и муфту сцепления. Изобретение направлено на повышение стабильности вертикального взлета и посадки, безопасности планирования с отключенным приводом винтов, а также в увеличении дальности и скорости горизонтального полета. 4 з.п. ф-лы, 3 ил.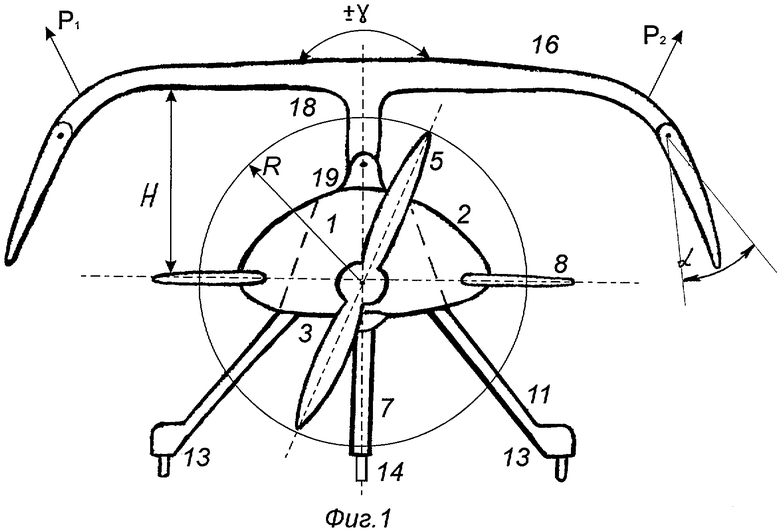
1. Универсальный летательный аппарат, содержащий фюзеляж с боковым профилем несущего крыла, колесным шасси и приводом двух винтов, управляемые аэродинамические поверхности вертикального руля и горизонтального оперения, закрепленные на передней части фюзеляжа, боковые стенки которого образованы вогнутыми поверхностями в его средней части с несущим крылом, а в кормовой части фюзеляжа установлена обдуваемая в полете воздушным потоком винтов V-образная аэродинамическая поверхность с управляемыми закрылками стабилизатора, отличающийся тем, что привод кормового реверсируемого винта имеет общий продольный вал, кинематически соединяющий его с оппозитно расположенным передним тянущим винтом, радиус вращения которого меньше высоты Т-образного несущего крыла по схеме верхнеплана, снабженного опущенными законцовками, установленными с возможностью управляемого поворота в пределах 90°, как и верхний киль Т-образного крыла, установленный на горизонтальной оси в верхней части фюзеляжа.
2. Универсальный летательный аппарат по п.1, отличающийся тем, что кормовой винт постоянного шага соединен с передним оппозитным винтом и общим приводным валом через реверс-редуктор, вариатор и муфту сцепления.
3. Универсальный летательный аппарат по п.1, отличающийся тем, что кормовой винт регулируемого шага соединен с общим приводным валом и передним оппозитным винтом через реверс-редуктор и муфту сцепления.
4. Универсальный летательный аппарат по п.1, отличающийся тем, что кормовая аэродинамическая поверхность с закрылками стабилизатора выполнена по схеме «низкоплан» типа обратное V и снабжена заднеприводными колесами шасси, а передний поворотный руль, закрепленный на нижней части фюзеляжа, снабжен передним рулевым колесом.
5. Универсальный летательный аппарат по п.1, отличающийся тем, что в горизонтальном плане кромки Т-образного крыла образованы двумя гиперболами с эксцентриситетом задней гиперболы больше, чем у передней.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2002 |
|
RU2209746C1 |
| АВТОМОБИЛЬНОЕ МОНТИРУЕМОЕ УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ ВЕЛОСИПЕДА | 2009 |
|
RU2406625C2 |
| US 4726546 А, 23.02.1988. | |||

