Изобретение относится к области точного приборостроения и может быть использовано в системах управления подвижными объектами различного назначения, а также в качестве измерителя и индикатора движения объекта.
Микромеханические гироскопы (ММГ) предназначены для измерения угловой скорости движения основания. Принцип их действия заключается в воздействии Кориолисова момента на вибрирующую инерционную массу (чувствительный элемент). Чувствительный элемент такого гироскопа совершает колебательные движения относительно оси первичных колебаний, при воздействии угловой скорости по оси чувствительности, возникает момент Кориолиса, вызывающий колебания относительно оси, перпендикулярной первым двум (ось вторичных колебаний). Амплитуда вторичных колебаний, модулированных частотой первичных колебаний, пропорциональна действующей угловой скорости. Колебания чувствительного элемента по осям первичных и вторичных колебаний могут описываться как колебания двух осцилляторов, связанных между собой некоторой функциональной зависимостью, соответственно первичного осциллятора и вторичного осциллятора. Чувствительность ММГ определяется добротностью колебаний чувствительного элемента гироскопа, а также рассогласованием частот первичных и вторичных колебаний. Для получения максимальной чувствительности ММГ должен быть вакуумирован и иметь одинаковые частоты по обеим осям (резонансная настройка). Обеспечить равенство мод первичных и вторичных колебаний технологическими способами не представляется возможным из-за погрешностей изготовления геометрии чувствительного элемента, поэтому эффективным путем обеспечения резонансной настройки является использование системы управления ММГ для сопряжения частот.
Известны микромеханические вибрационные гироскопы [RU 2178548 C1, WO 02/103364 А2, WO 2004/038332 A1, WO 01/27559 A2].
По наибольшему числу общих существенных признаков в качестве прототипа принят ММВГ RU 2178548 C1, содержащий инерционную массу, датчики углов и моментов по осям первичных и вторичных колебаний, а также систему управления по оси первичных колебаний, выполняющую функции возбуждения и стабилизации первичных колебаний, и систему управления по оси вторичных колебаний, выполняющую функции стабилизации частоты вторичных колебаний на двойной частоте по отношению к частоте первичных колебаний.
Недостатком прототипа является снижение чувствительности датчика к угловой скорости за счет разнесения частот.
Задачей предлагаемого изобретения является увеличение чувствительности ММГ за счет совмещения частоты вторичных колебаний с частотой первичных колебаний.
Задача решается с использованием системы управления ММГ по оси вторичных колебаний на основе фазового детектора.
Анализ методов совмещения частот, проведенный авторами, позволил сделать вывод о том, что лучшие результаты дает метод, основанный на анализе фазового сдвига между вторичными и первичными колебаниями. При высокой добротности измерительного канала фазовый детектор обладает очень высокой чувствительностью и способен реагировать на частоту расстройки, измеряемую долями герц.
Преимуществом фазового детектора является его нечувствительность к величине амплитуд входных сигналов, что важно для обеспечения требуемой динамики и устойчивости контура сопряжения частот в широком диапазоне измеряемой прибором угловой скорости. Кроме того, структура фазового детектора сравнительно просто реализуется в цифровой электронике.
Сущность изобретения поясняется чертежом 1, на котором приведена функциональная схема ММВГ, где
1 - первичный осциллятор;
2 - датчик угла по оси первичных колебаний (ДУПК);
3 - система управления первичными колебаниями (СУПК);
4 - датчик момента по оси первичных колебаний (ДМПК);
5 - датчик угла по оси вторичных колебаний (ДУВК);
6 - фазочувствительный выпрямитель (ФЧВ);
7 - блок дифференцирования сигнала;
8 - фазовый детектор (ФД);
9 - позиционно-интегральный регулятор;
10 - блок, изменяющий знак коэффициента обратной связи;
11, 12 - умножители;
13 - датчик угла по оси вторичных колебаний;
14 - вторичный осциллятор;
My - управляющий момент;
Uвых - выходной сигнал ММГ.
Входы и выходы блоков, перечисленных выше, обозначены на чертеже как
вх1, вх2 - для входов 1 и 2;
вых1, вых2 - для выходов 1 и 2.
Схема содержит два замкнутых контура: контур первичных колебаний, образованный блоками 1-4, и контур вторичных колебаний (блоки 5-13). Контур первичных колебаний выполняет функции разгона и поддержания требуемой амплитуды колебаний первичного осциллятора 1. Для этого к выходу первичного осциллятора 1 подключен ДУПК 2, с помощью которого амплитуда первичных колебаний преобразуется в напряжение. Выход ДУПК 2 подключен к входу СУПК 3, выполняющей функции возбуждения и стабилизации первичных колебаний в контуре. Для создания управляющих моментов выход СУПК 3 подключен к входу ДМПК 4, выход которого подключен к входу первичного осциллятора 1. Контур вторичных колебаний выполняет функции выделения сигнала о действующей угловой скорости и сопряжения частот первичных и вторичных колебаний. К вторичному осциллятору 14 подключен ДУВК 5, с помощью которого амплитуда вторичных колебаний преобразуется в напряжение. Для выделения полезного сигнала сигнал с выхода ДУВК 5 поступает на первый вход ФЧВ 6. На второй вход ФЧВ 6 поступает сигнал, пропорциональный угловой скорости первичных колебаний, формируемый на выходе блока дифференцирования 7, к входу которого подключен ДУПК 3. ФВЧ 6 вырабатывает так называемую синфазную составляющую сигнала вторичных колебаний, несущую информацию о действующей на прибор угловой скорости Uвых. Для сопряжения частот используется система управления частотой вторичных колебаний, содержащая фазовый детектор 8, позиционно-интегральный регулятор 9, блок, изменяющий знак коэффициента обратной связи 10, умножители 11 и 12.
На первый вход фазового детектора 8 подается сигнал с ДУВК 5, а на второй - сигнал, пропорциональный угловой скорости первичных колебаний, формируемый на выходе блока дифференцирования 7. Выходной сигнал фазового детектора 8 подается на вход позиционно-интегрального регулятора 9, который формирует коэффициент обратной связи гироскопа по вторичным колебаниям. Параметры регулятора выбираются таким образом, чтобы обеспечить работу фазового детектора в рабочей зоне  с требуемыми динамическими характеристиками системы сопряжения частот.
с требуемыми динамическими характеристиками системы сопряжения частот.
Для исключения зависимости знака фазового сдвига от направления измеряемой угловой скорости в схему введен блок, изменяющий знак коэффициента обратной связи 10. На вход блока 10 подается сигнал с выхода ФЧВ 6. Сигнал с выхода блока 10 подается на первый вход первого умножителя 11. На второй вход первого умножителя 11 подается сигнал с позиционно-интегрального регулятора 9. Выход первого умножителя 11 подключен к первому входу второго умножителя 12, который формирует окончательный вид управляющего момента My. На второй вход второго умножителя 12 подается сигнал с выхода ДУВК 5. Выход второго умножителя 12 подключен к входу ДМВК 13, выход которого подключен к входу вторичного осциллятора 14 и замыкает контур управления вторичными колебаниями.
Приведенные схемотехнические нововведения позволяют увеличить чувствительность ММГ к угловой скорости до 1000 раз (при вакуумировании) в зависимости от изначального рассогласования частот.
Технико-экономические преимущества изобретения по сравнению с прототипом, характеризующим существующий уровень техники, заключаются в повышении чувствительности ММГ к угловой скорости, и повышении соотношения сигнал-шум для ММГ.
Расчетно-теоретические исследования и моделирование, проведенные в ЦНИИ "Электроприбор", подтвердили высокую техническую эффективность предложенного устройства.
Изобретение предназначено для использования в системах управления подвижными объектами, а также в качестве измерителя и индикатора движения объекта. Микромеханический гироскоп содержит механическую часть, состоящую из ротора, датчиков углов и моментов по осям первичных и выходных колебаний, и электрическую часть, состоящую из системы возбуждения и стабилизации первичных колебаний, и системы сопряжения частот первичных и вторичных колебаний. При этом система сопряжения частот построена на базе фазового детектора, входящего в контур обратной связи по оси вторичных колебаний. Техническим результатом является увеличение чувствительности микромеханического гироскопа к угловой скорости за счет совмещения первичных и выходных колебаний электрическим способом с помощью системы сопряжения частот. 1 з.п. ф-лы, 1 ил.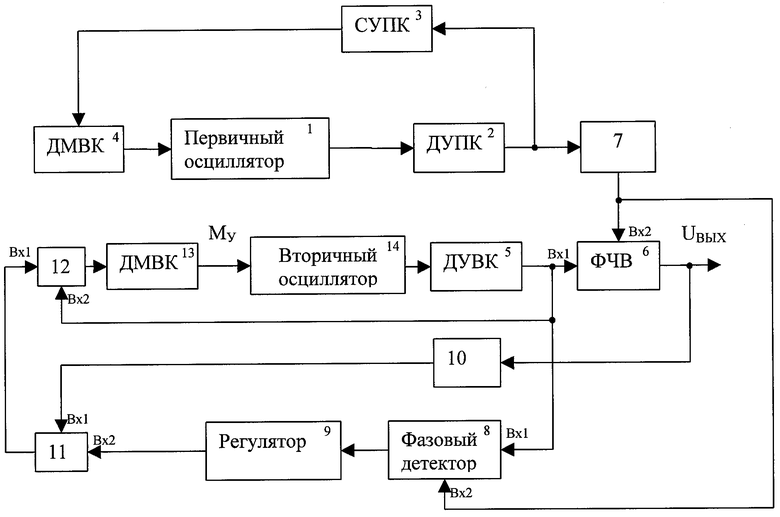
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2000 |
|
RU2178548C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2272994C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| JP 2001188011 A, 10.07.2001. | |||

