Изобретение относится к области гидроакустики и может быть использовано для обнаружения слабошумящей подводной цели в натурном водоеме.
Известно устройство, аналогичного назначения - активный гидролокатор, содержащий гидроакустический приемо-передающий преобразователь, формирователь узкой характеристики направленности преобразователя, блок обработки и блок регистрации [1].
Недостатком активного гидролокатора является отсутствие скрытости в его работе.
Известен шумопеленгатор, работающий на пассивном принципе обнаружения цели [2], принятый за прототип. Прототип содержит гидрофон и подключенные к его выходу блок обработки информации с блоком регистрации.
Недостатком известного шумопеленгатора является трудность регистрации слабошумящей цели.
Техническим результатом, получаемым от внедрения изобретения, является возможность регистрации малошумящих целей.
Данный технический результат достигается за счет того, что известный гидроакустический шумопеленгатор, содержащий гидрофон и подключенные к его выходу блок обработки информации с блоком регистрации, дополнительно содержит последовательно установленные и оптически согласованные лазерный источник локального нагрева жидкости, формирователь лазерного луча и дефлектор, при этом гидрофон выполнен с равномерной характеристикой направленности и расположен на оптической оси лазера за дефлектором.
Формирователь лазерного луча выполнен в виде зеркальной телескопической системы, которая, в свою очередь, может быть выполнена в виде последовательно расположенных за лазерным источником вогнутого и выпуклого зеркал, при этом выпуклое зеркало обращено к лазерному источнику и вогнутому зеркалу, которое выполнено с отверстием и с возможностью изменения взаимного расстояний между зеркалами.
Шумопеленгатор может дополнительно содержать N лазерных источников локального нагрева жидкости и оптический объединитель лазерных лучей с N + 1 входов, установленный перед формирователем лазерного луча.
В качестве лазерного источника локального нагрева жидкости используются импульсные рубиновый или неодимовый лазеры.
На фиг.1 представлена схема шумопеленгатора; на фиг. 2 - вариант выполнения формирователя лазерного луча; на фиг. 3 - схема объединителя лазерных лучей; на фиг.4,5 - диаграммы для пояснения принципа работы шумопеленгатора.
Шумопеленгатор содержит гидрофон 1 с подключенными к его выходу блоком обработки информации и блоком регистрации (не показаны), а также последовательно установленные и оптически согласованные лазерный источник 2 локального нагрева жидкости, формирователь 3 лазерного луча 4 с полой сердцевиной, поворотное зеркало 5 и дефлектор 6. При этом гидрофон 1 выполнен с равномерной характеристикой направленности и расположен на оптической оси лазера 2.
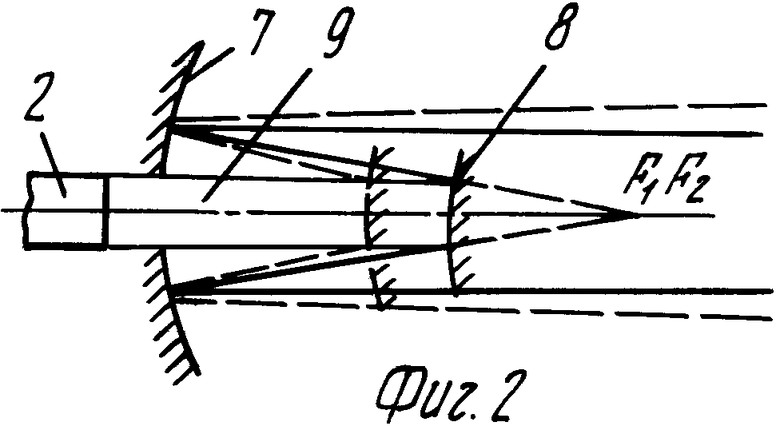
Формирователь лазерного луча может быть выполнен в виде телескопической системы [3] в виде (фиг.2) последовательно расположенных за лазерным источником 2 вогнутого и выпуклого зеркал 7, 8, при этом выпуклое зеркало 8 обращено к лазерному источнику и вогнутому зеркалу 7, которое выполнено с отверстием 9 и с возможностью изменения взаимного расстояния между зеркалами.
Шумопеленгатор может дополнительно содержать N лазерных источников 2 локального нагрева жидкости (на фиг. 3-два) и оптический объединитель лазерных лучей с N + 1 входов 10 (на фиг. 3-с тремя входами). Оптический объединитель лазерных лучей может быть выполнен волоконным [4].
Дефлектор 6 может быть выполнен по любому известному принципу [5].
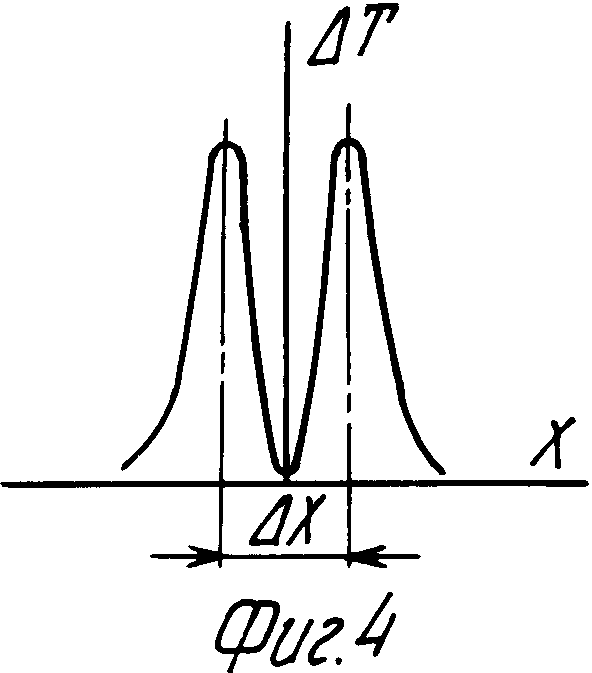
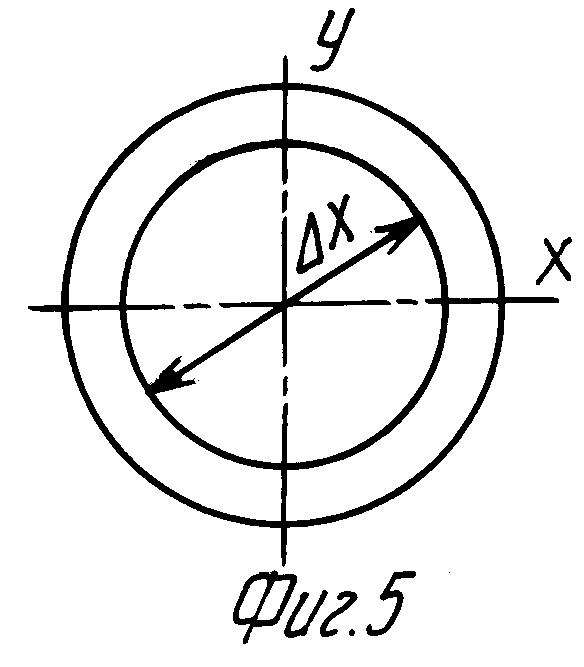
Работа шумопеленгатора основана на том, что в жидкости формируется полая температурная зона (фиг.4, 5) в виде перегретой на периферии зоны жидкости. Поскольку скорость звука в натурном водоеме изменяется на 3,5-4 м/с на 1oC [6] , то даже небольшого температурного превышения температуры жидкости (в десятые доли градуса) достаточно для того, чтобы звуковая волна отражалась от перегретых слоев жидкости. В связи с этим перегретая зона в виде полой цилиндрической или конической поверхности образует звукопроводный канал 11 (фиг.1) наподобие естественного подводного звукового канала в океане [7].
Длина волны лазерного источника 2 подбирается исходя из расстояния между гидрофоном 1 и целью 12 (фиг.1), а также, исходя из поперечных размеров Δx формируемого звукопроводного канала (фиг.4,5).
Поглощение лазерного излучения водой происходит экспоненциально по закону Бугера I = I0•e-μl, , где I, I0 - интенсивности лазерного излучения на глубине l и нулевой глубине соответственно; μ - коэффициент поглощения водой лазерного излучения.
Коэффициент поглощения света водой на длине волны 1,06 мкм неодимового лазера составляет величину порядка 10 м-1 [8]. При этом лазерный импульс порядка нескольких десятков джоулей нагревает воду в зоне облучения на 1-10oC на длине порядка 10 м.
При расстояниях между гидрофоном и целью порядка 100 м целесообразно применение лазера на рубине с длиной волны около 0,7 мкм, на которой коэффициент поглощения лазерного излучения водой порядка 1 м-1 [8]. Поэтому для получения того же перегрева воды в зоне облучения потребуется энергия порядка тысяч джоулей в импульсе.
Необходимые для реализации шумопеленгатора лазерные источники в настоящее время свободно продаются в специализированных магазинах. Длительность лазерного импульса у лазерного источника 2 не должна быть меньше 10-4с, иначе произойдет пробой воды.
Если энергии лазерного источника будет не хватать для формирования соответствующей температурной зоны, возможно применение нескольких лазерных источников.
От поперечных размеров формируемой температурной зоны зависит нижняя граница пропускаемого каналом спектра шума, излучаемого целью.
Для регистрации шумоизлучения в частотном диапазоне f≥ 1,5 кГц поперечный размер Δx звукопроводного канала должен быть не менее Δx ≅ c/f = 1500/1500~1•м, где с - скорость звука в воде. А для частотного диапазона f≥ 150 Гц, Δx - уже порядка 10 м.
Шумопеленгатор работает следующим образом.
Гидрофон 1 с равномерной характеристикой направленности работает в пассивном режиме слежения за повышением цели 12 в контролируемой зоне водоема. При обнаружении последней включается лазерный источник 2, излучение которого с помощью формирователя 3 преобразует асимметричный луч с полой сердцевиной (фиг. 5). Если формирователь 3 выполнен в виде зеркальной телескопической системы (фиг.2), то в зависимости от положения выпуклого зеркала 8 луч будет цилиндрической (если фокусы F1, F2 зеркал 7, 8 совпадают) или конической формы [3] (в любом другом случае).
С помощью поворотного зеркала 5 лазерный луч направляется на дефлектор 6, который автоматически или вручную изменяет положение формируемого в жидкости звукопроводного канала в виде зоны с повышенной по периферии температурой (фиг.4). Когда лазерный луч займет положение 13 (фиг.1), произойдет резкое усиление высокочастотной составляющей шума, что укажет на наличие цели 12 в данной области натурного водоема.
Возможен другой режим работы шумопеленгатора - режим непрерывного сканирования звукопроводного канала.
В этом режиме формирователь 3 лазерного луча формирует конический луч, который дефлектор 6 непрерывно сканирует по контролируемому пространству натурного водоема. При попадании подводного шумящего объекта в зону звукопроводного канала 13 регистратор шумопеленгатора фиксирует наличие цели, даже если уровень шумоизлучения ее мал для регистрации гидрофоном 1 в обычных условиях без звукопроводного канала.
Большая часть акустической энергии шумоизлучения цели локализуется в звукопроводном канале. При этом коническая форма канала позволяет не только увеличить зону обзора шумопеленгатора, но и дополнительно усилить звуковой сигнал в зоне расположения гидрофона 1 за счет пространственной локализации звукового давления (получается как бы звуковой рупор).
В дальнейшем поперечные размеры зоны облучения можно уменьшить для более точного определения координат цели.
Таким образом, с помощью шумопеленгатора можно обнаруживать и сопровождать малошумные цели в пассивном режиме работы акустического устройства.
Источники информации.
1. Патент США N 4319348, кл. 367-87 (G 01 S 15/04), 1982.
2. Заявка Франции N 2414732, кл. G 01 S 3/80, 1979 - прототип.
3. А.Н.Изнар, А.В.Павлов, Б.Ф.Федоров. Оптико-электронные приборы космических аппаратов. М.: Машиностроение, 1972, с.79, рис.329а.
4. С. Е.Здор, В.Б.Широков. Оптический поиск и распознавание. М.: Наука, 1973, с.160, рис. 7. 7.
5. Ю.К.Ребрин. Управление оптическим лучом в пространстве. М.: Сов. радио, 1977.
6. M. Greenspan, C.E.Tschiego. Table of speed of sound in water, J.Acoust.Soc.Amer., 1959, 31, N 1, p.75-76.
7. А. П. Евтютов, А.Е.Колесников и др. Справочник по гидроакустике. Л. Судостроение, 1982, с.65-69.
8. Ю. Н. Власов, В.М.Латышев, В.И.Савагов, А.М.Трохан. Оптический визуальный метод исследования течений жидкости. Теплофизика высоких температур, 1972, 10 N5, 1135-1137.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-АКУСТИЧЕСКИЙ ГИДРОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ БЕСШУМНЫХ ПОДВОДНЫХ ЦЕЛЕЙ В РЕЖИМЕ ПАССИВНОЙ ГИДРОАКУСТИКИ | 1997 |
|
RU2115938C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА | 1995 |
|
RU2105991C1 |
| ГИДРОЛОКАТОР ДЛЯ ОПТИКО-АКУСТИЧЕСКОГО ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 1997 |
|
RU2141676C1 |
| ТЕРМООПТИЧЕСКИЙ СПОСОБ ОБСЛЕДОВАНИЯ ПОДВОДНОГО ОБЪЕКТА | 2001 |
|
RU2192023C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ СЛАБОШУМЯЩИХ ОБЪЕКТОВ В ВОДНОЙ СРЕДЕ | 1997 |
|
RU2125731C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЕЙ ДАВЛЕНИЯ И ПРОСТРАНСТВЕННОГО РАСПОЛОЖЕНИЯ ИСТОЧНИКОВ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1993 |
|
RU2092802C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВОДНОЙ ЦЕЛИ | 1999 |
|
RU2154842C1 |
| ВОЛОКОННО-ОПТИЧЕСКАЯ ГИДРОАКУСТИЧЕСКАЯ ИЗМЕРИТЕЛЬНАЯ АНТЕННА | 1995 |
|
RU2112248C1 |
| ОПТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ГИДРОФОН | 2001 |
|
RU2185709C1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ШУМОИЗЛУЧЕНИЯ ПОДВОДНОГО ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2000 |
|
RU2178630C1 |

Использование: для обнаружения слабошумящей подводной цели в натурном водоеме. Сущность изобретения: с помощью лазерного луча, частично поглощаемого жидкостью, в водоеме формируется звукопроводный канал в форме полой конической или цилиндрической поверхности, представляющей собой перегретую относительно фона жидкость. Шумоизлучение от подводной цели, практически не ослабляясь, проходит по звукопроводному каналу до гидрофона. Сканирование лазерного луча позволяет осуществить обнаружение и сопровождение малошумящей цели в пассивном режиме. 5 з.п. ф-лы, 5 ил.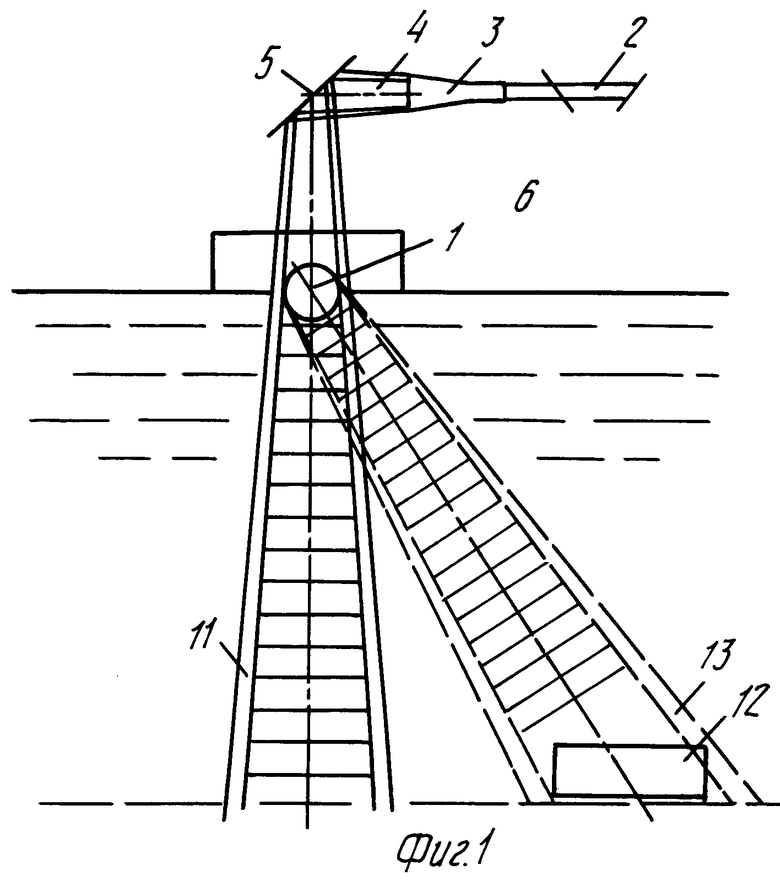
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US, патент, 4319348, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| FR, патент, 2414732, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
