Изобретение относится к способу и устройству для обработки сигналов, характеризующих волны, которые отражены или пропущены объемной структурой, с целью проведения исследования и анализа этой структуры.
В частности, оно применимо для создания аппаратуры типа эхографов, приборов неразрушающего контроля, гидролокаторов и других подобных устройств, вплоть до радиолокационных станций.
В традиционных системах этого типа обычно применяются передающие средства, которые излучают волну, падающую на подлежащую исследованию среду, и приемные средства, использующие при необходимости целиком или частично передающие средства (гомодинные системы), которые принимают волны, отраженные структурами, встретившимися на пути падающей волны. Кроме того, используются средства для преобразования и обработки сигналов, принятых приемными средствами, и для их представления в форме, удобной для пользователя, например в виде изображения, позволяющего определить положение препятствий, создающих отражения падающей волны.
Для получения указанных результатов наиболее распространен способ, который заключается в таком использовании импульсных волн, когда осуществляют передачу импульса в некотором направлении ("выстреливание"), обнаруживают вернувшиеся эхо-сигналы, измеряют время, прошедшее между передачей и приемом, и исходя из этого определяют расстояние и, следовательно, положение препятствий, породивших каждый эхо-сигнал. Затем описанную операцию "выстреливания" повторяют в других направлениях, следуя заданному закону сканирования.
После завершения такого сканирования появляется возможность получить (например, с помощью стандартной системы индикации) изображения, на которых показаны обнаруженные с помощью эхо-сигналов препятствия, положение которых уже известно.
В разнообразной аппаратуре такого рода применяется так называемый "последовательный" метод, согласно которому структура исследуется построчно с помощью подвижного луча, при этом строка сканирования смещается между каждыми двумя следующими друг за другом "выстрелами".
В этих условиях скорость сканирования возрастает с увеличением сечения развертывающего пучка и частоты повторения импульсов. Однако известно, что сечение пучка ограничено требуемой пространственной разрешающей способностью, а частота повторения импульсов - временем, необходимым для возврата к зонду всех отраженных эхо-сигналов.
Например, при исследовании алюминиевой пластины, в которой требуется обнаружить дефекты диаметром 1 мм с разрешающей способностью, равной 3 мм, сечение пучка не должно превышать 2 мм, а частота повторения импульсов, учитывая явление реверберации, должна быть ниже 1000 Гц.
С учетом сказанного, скорость обследования поверхности не может превышать 2 мм • 2 мм • 1000 = 4000 мм2/с, или 4/1000 м2/с, то есть 4/1000 • 3600 = 14,4 м2 за один час. На выходе технологической линии эта скорость часто оказывается слишком низкой, из-за этого замедляется производственный процесс, в результате чего иногда приходится запускать параллельно несколько установок.
Во многих других сферах применения, таких как контроль трубопроводов, рельсовых путей и прочего оборудования, подобные ограничения оказываются еще более строгими.
Ранее для устранения этих недостатков было предложено передавать в направлении исследуемого объекта практически плоскую волну сравнительно большого сечения, генерируемую зондирующим устройством (зондом), который образован системой из множества малогабаритных, размером преимущественно менее длины волны, приемо-передающих элементов, с тем чтобы получить максимально широкую диаграмму направленности, причем указанные передающие элементы приводятся в действие одновременно, параллельно друг другу. При приеме каждый приемо-передающий элемент работает независимо от остальных и, следовательно, принимает по отдельности волны, отраженные встретившимися на пути луча препятствиями в зоне приема. После преобразования в цифровую форму информации, выданной этими передающими элементами ("поле отраженных волн"), она записывается в запоминающие устройства, считывание из которых производится в порядке, обратном порядку записи.
После этого считанные сигналы подаются на специальное устройство восстановления отраженных волн, которое содержит ряд передающих элементов, распределенных по схеме, подобной схеме распределения приемо-передающих элементов вышеупомянутого зонда. Подача считанных сигналов на эти передающие элементы осуществляется в соответствии с передачей в запоминающее устройство сигналов записи из приемо-передающих элементов.
Назначение устройства восстановления состоит в воспроизведении поля отраженной волны в какой-либо вспомогательной среде в целях воспроизведения изображения объекта с разрешающей способностью, которая определяется длиной падающей волны и размерами элементов зонда.
В случае, когда мы имеем дело с ультразвуковыми падающими волнами, самое простое решение заключается в том, чтобы сформировать изображение в оптически прозрачной среде и затем осуществить его визуальную индикацию шлирен-методом.
К сожалению, описанный способ непригоден для промышленной эксплуатации и, кроме того, он не является линейным и не позволяет восстановить высокочастотные составляющие.
В соответствии с другой методикой изображение снимают со специального третьего зонда и изменяют частоту считывания таким образом, чтобы изображение структуры всегда было "законченным" в момент поступления соответствующих сигналов на этот зонд.
Выяснилось, однако, что подобная система слишком сложна и требует работы с очень широкополосными зондами. Кроме того, при прохождении сигнала через три зонда подряд происходит ухудшение его характеристик. В случае же использования наклонного или круглого зонда возникают и другие проблемы.
Таким образом, конкретной задачей изобретения является устранение указанных недостатков.
При его осуществлении используется тот факт, что в ходе выполнения процедуры, типа описанной выше, каждая точка исследуемого объекта является источником соответствующей отраженной волны, которая записывается в ячейки запоминающих устройств, распределенные в виде дуг гипербол, параметры которых являются функцией расстояния от точки до зонда и диаграммы направленности каждого элемента (теоретически такие гиперболы для точек, расположенных напротив зонда, сходятся к двум асимптотам).
Способ согласно изобретению состоит, во-первых, в том, что для точки объекта рассчитывают адреса считывания таким образом, чтобы они строго соответствовали сигналу, записанному в данный момент, таким образом эти адреса распределяются в полевом запоминающем устройстве, содержащем указанные зоны, по гиперболическому закону, и, во-вторых, в том, что осуществляют повторное считывание из полевого запоминающего устройства с соблюдением указанного закона, с тем чтобы каждой точке исследуемого объекта привести в соответствие результат расчета, выполненного на том множестве отдельных точек полевого запоминающего устройства, в котором записана информация о поле, отраженном или видоизмененном точкой объекта. Все строки полевого запоминающего устройства считываются параллельно, а полученные значения суммируются (либо непосредственно в цифровой форме, либо в аналоговой - после цифро-аналогового преобразования) с целью формирования напряжения Vp, значение которого вводится в запоминающее устройство "изображения", содержащее множество точек, каждой из которых соответствует некоторый, например гиперболический, закон считывания, параметры которого определяются координатами этой точки.
Таким образом, предложен способ обработки сигналов, характеризующих волны, которые отражены или пропущены некоторым объектом, для исследования и анализа структуры этого объекта, включающий излучение по меньшей мере одной волны, падающей на указанный объект, прием волн, отраженных или пропущенных структурами, встретившимися на пути падающей волны внутри объекта, рядом независимых друг от друга обнаруживающих элементов, преобразование информации, выданной приемными средствами, в цифровую форму с ее последующей записью в полевое запоминающее устройство и воспроизведение и/или анализ структуры объекта на основе данных, считанных из полевого запоминающего устройства, при этом согласно изобретению для каждой точки объекта рассчитывают позиции ячеек, занимаемых в полевом запоминающем устройстве сигналами, обнаруженными в данный момент указанными элементами, каждый из которых подключен к соответствующей ему области полевого запоминающего устройства через соответствующий аналого-цифровой преобразователь, и соответствующими волнам, которые отражены или пропущены данной точкой объекта, а затем производят повторное считывание из полевого запоминающего устройства так, чтобы каждой точке объекта привести в соответствие результат расчета, выполненного на том множестве отдельных ячеек полевого запоминающего устройства, в котором записана информация о поле, отраженном или видоизмененном точкой объекта, при этом выполняют над всеми данными, содержащимися в ячейках, где хранится информация, относящаяся к каждой точке объекта, ряд операций, результат которых определяет амплитуду волны, отраженной или переданной соответствующей точкой объекта, причем впоследствии этот результат обрабатывают или хранят в отдельном запоминающем устройстве.
Учитывая то обстоятельство, что расчет каждого закона считывания занимает слишком много времени, для того чтобы его можно было выполнить в реальном масштабе времени, его производят предварительно, а результаты хранят в специальных так называемых "адресных" запоминающих устройствах, приданных каждой строке "полевого" запоминающего устройства.
В этом случае процесс считывания протекает следующим образом.
Для каждой точки запоминающего устройства "изображения" координаты этой точки параллельно передаются во все "адресные" запоминающие устройства. Последние сразу же выдают, также одновременно, адреса для каждой строки "полевого" запоминающего устройства, позволяющие генерировать соответствующий закон считывания (например, по гиперболе). При этом соответствующее напряжение Vp записывается в запоминающее устройство "изображения" по адресу указанной точки.
Ниже в качестве примера, не имеющего ограничительного характера, описывается один из вариантов осуществления изобретения со ссылками на чертежи, на которых
фиг. 1 изображает схему устройства для исследования и анализа объемной структуры;
фиг. 2 представляет собой схематическую иллюстрацию принципа действия устройства, показанного на фиг. 1.
Устройство на фиг. 1 можно использовать в ультразвуковых приборах, работающих с отражением импульсов, для неразрушающего контроля материалов или формирования и обработки изображений в медицине.
В нем применен зонд 1, образованный прямолинейной планкой, состоящей из ряда приемо-передающих элементов D1-Dn небольших размеров (1 мм) в количестве, равном, например, 128. Благодаря этому один и тот же зонд 1 можно использовать как для передачи, так и для приема.
Каждый элемент D1-Dn подключен с одной стороны к какой-либо области (в данном случае соответствующей строке L1-Ln) полевого запоминающего устройства МС через предварительный усилитель А и аналого-цифровой преобразователь CAN и с другой стороны - к передатчику Е через два встречно-параллельно соединенных диода 2, 3 с порогом проводимости порядка долей вольта.
Таким образом, когда передатчик Е вырабатывает переменное напряжение, которое может достигать сотни вольт, диоды 2 и 3, связанные со всеми приемопередающими элементами D1-D9, находятся в явно проводящем состоянии и, по сути дела, коротко замкнуты, в результате чего все элементы D1-D9 параллельно возбуждаются передатчиком Е, вырабатывая при этом плоскую волну.
При приеме же каждый из элементов D1-D9 работает независимо и возбуждает предварительный усилитель А, с которым он соединен. На практике сигналы, обнаруживаемые этими элементами, довольно незначительны (порядка десятков милливольт).
Благодаря такой мере достигается дополнительное преимущество, заключающееся в том, что снижается входной шум за счет развязки предварительных усилителей А от цепи передачи.
Далее сигналы с каждого из предварительных усилителей А поступают на соответствующий аналого-цифровой преобразователь CAN и после преобразования в цифровую форму хранятся в строках L1-Ln памяти по адресам записи, предоставляемым адресным запоминающим устройством МА, адресация которого, в свою очередь, осуществляется счетчиком CR, управляемым тактовым генератором СК. Указанные счетчик CR и тактовый генератор СК являются общими для всех адресных запоминающих устройств МА, связанных со строками запоминающих устройств L1-Ln.
При записи в строки запоминающих устройств L1-Ln выходы адресных запоминающих устройств соответствуют адресу, то есть дело обстоит так, как если бы счетчик CR параллельно обращался к строкам L1-Ln полевых запоминающих устройств.
Целесообразно выбирать количество N позиций запоминающих устройств, используемых в процессе записи, из степеней числа два, например 512, 1024 и т. д.
Так, например, если N равно 512, то записаны будут ячейки 0-511 полевого запоминающего устройства.
Сразу после записи запоминающие устройства L1-Ln переключаются на режим считывания с помощью триггерной схемы В, управляемой десятым разрядом счетчика CR.
Начиная с адреса 512, выходы строк запоминающих устройств L1-Ln уже не являются одинаковыми, а рассчитываются таким образом, чтобы адресуемые ячейки запоминающих устройств соответствовали какому-то заданному порядку (гиперболе считывания).
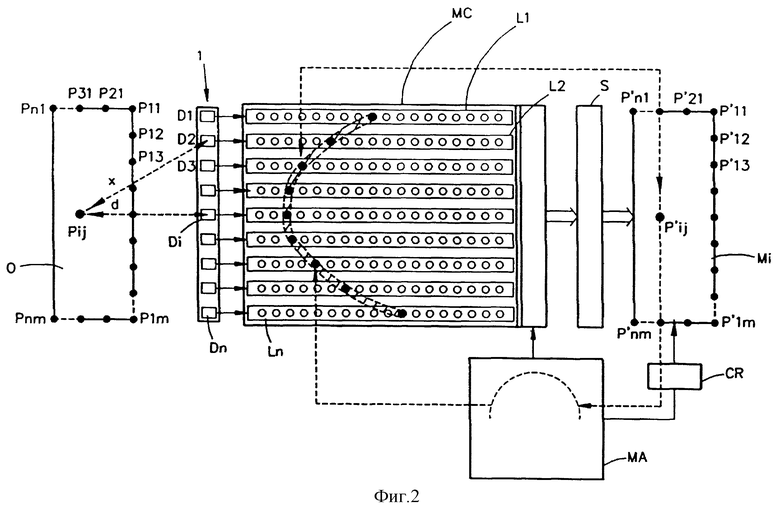
Этот расчет выполняется следующим образом. Начиная с адреса 512, счетчик CR задает адрес ячейки P'ij запоминающего устройства Mi (фиг. 2). Каждой точке от Р'11 до P'nm этого запоминающего устройства Mi ставится в соответствие какая-либо позиция от Р11 до Pnm исследуемого объекта О с тем, чтобы запоминающее устройство Mi можно было впоследствии использовать для получения изображения объекта О.
Для каждой из указанных точек Р'11, P'nm рассчитывают положения, которые в строках L1-Ln запоминающего устройства занимает отраженный ультразвуковой импульс, учитывая при этом форму излучаемого поля, частоту преобразования в цифровую форму, скорость звука и положение объекта относительно зонда. Таким образом, для точки объекта Pij, которая соответствует точке P'ij запоминающего устройства "изображения" Mi, ячейки, занимаемые в полевом запоминающем устройстве МС, располагаются по гиперболе, показанной на диаграмме штриховкой.
Если зонд 1 находится в прямом контакте с объектом, то преобразование в цифровую форму может начинаться одновременно с передачей. При работе же с акустической ретрансляцией начало преобразования может быть сдвинуто на время, равное прохождению сигнала через ретранслятор и обратно.
Значения, считанные из различных ячеек памяти (например, значения, содержащиеся в ячейках строк, которые находятся на гиперболе Н, соответствующей точке Pij), складываются в суммирующей схеме S и передаются в выбранную ячейку запоминающего устройства Mi (например, позицию P'ij).
Как было сказано выше, данные, содержащиеся в запоминающем устройстве Mi, можно использовать по-разному.
Они могут послужить для формирования изображения на экране дисплея V традиционного типа.
Их можно также подвергнуть обработке, например, в логических схемах, обеспечивающих выявление и регистрацию вида дефектов, обнаруженных в процессе неразрушающего контроля.
Адресные запоминающие устройства МА могут представлять собой раз и навсегда запрограммированные запоминающие устройства (постоянные запоминающие устройства (ПЗУ), программируемые ПЗУ, перепрограммируемые ПЗУ), однако по соображениям как скорости, так и гибкости эксплуатации предпочтительнее применять запоминающие устройства, которые после их установки в схему могут быть перепрограммированы, например типа запоминающих устройств с произвольным доступом.
При этом программирование может осуществляться в момент запуска. Предварительный расчет может быть выполнен мини-ЭВМ в соответствии с условиями исследования и используемой моделью зонда. Можно также предварительно рассчитать и сохранить данные на дисках или в программируемом ПЗУ. Затем результаты традиционным способом последовательно переносятся в запоминающее устройство МА. Этот перенос может происходить очень быстро (в течение нескольких секунд).
Приведем пример расчета адресов в адресных запоминающих устройствах МА применительно к схеме фиг. 2.
Пусть точка Pij находится на расстоянии d от зонда на одной линии с обнаруживающим элементом Di и этой точке Pij ставится в соответствие ячейка P'ij запоминающего устройства "изображения" Mi и, следовательно, некоторый адрес, задаваемый счетчиком CR.
Пусть также х - расстояние между элементом D1 зонда 1 и элементом Di, находящимся на одной линии с точкой Pij, а с - скорость звука в среде объекта.
Если предположить, что волна, испускаемая зондом 1, плоская и распространяется перпендикулярно его поверхности, то время t(x), нужное импульсу для достижения какого-либо обнаруживающего элемента, например D3, после отражения от точки Pij, будет равно сумме d/c (время, затрачиваемое излучаемой волной для прибытия в точку Pij) и квадратного корня величины (х2+d2)/c: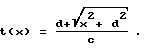
Если обозначить частоту записи символом f и если запись начинается одновременно с передачей, то отраженный сигнал будет храниться в ячейке полевого запоминающего устройства МС, находящейся по абсциссе х в позиции f•t(x).
В этих условиях в запоминающее устройство МА для использования в ходе операции считывания будет введено именно приведенное выше значение f•t(x).
Если же распространение волны происходит не перпендикулярно зонду (зондирование с наклонным падением) или если это не плоская волна (круговая волна в случае секторного зондирования), то расчет выполняется практически так же, меняется лишь время, затрачиваемое волной на прибытие в точку Pij. Здесь это время зависит уже не только от d, но и от бокового положения точки Pij по отношению к зонду 1. Если мы имеем дело с наклонной волной, то время линейно изменяется в функции бокового положения Хр, при этом время, затрачиваемое излученной волной на прибытие в точку Pij, равно (d•cos(θ)+Xp•sinθ)/c, где θ - угол испускаемого луча относительно нормали к зонду 1.
Когда волны, генерируемые зондом 1, являются незатухающими или частично незатухающими и имеют вид волнового пакета с длительностью, достаточной для охвата всего объекта, каждая точка будет служить источником отраженной волны с такой длительностью, при которой она будет записана почти во все ячейки строк запоминающих устройств МС, а данные, соответствующие разным точкам, будут накладываться друг на друга.
В этих условиях можно предположить, что некоторый "слой" этих запоминающих устройств будет содержать все данные, относящиеся к объекту, с того момента, когда этот слой будет иметь достаточную "толщину" для того, чтобы он мог включать в себя наибольшую из гипербол.
Следовательно, считывания одного этого слоя будет достаточно для воссоздания изображения объекта.
Это считывание можно выполнить путем постепенного изменения формы гипербол считывания, либо "настроив" систему на зону, находящуюся на заданном расстоянии.
В этом случае преобразование сигнала в цифровую форму придется выполнять с большим количеством уровней, с тем чтобы получить качественное различение разной информации.
Можно также для упрощения электронных схем предусмотреть последовательную адресацию запоминающего устройства МС в ходе записи, хотя повторное считывание будет по-прежнему производиться параллельно (при этом понадобятся единственный предварительный усилитель и единственный аналого-цифровой преобразователь).
В этом случае скорость сбора данных существенно снижается, однако разрешающая способность остается еще на высоком уровне. Подобное решение может быть целесообразным в тех случаях, когда стремление к высокой скорости не является первоочередной задачей. Можно применить и какие-либо смешанные варианты типа параллельной записи в группы запоминающих устройств, тогда адресация таких групп будет производиться последовательно.
В описанном выше примере запись ультразвукового сигнала производится перед детектированием, то есть на высокочастотном уровне. Частота выборки должна по меньшей мере в три раза превышать ультразвуковую частоту, то есть для ультразвуковой волны частотой, например, 3 МГц она должна составлять 10 МГц.
Таким образом, при необходимости прозондировать сталь на глубину 10 см максимальное время прямого и обратного хода сигнала равно приблизительно 60 микросекундам, или по 600 дискретно выбранных точек на каждую строку.
Следовательно, для изображения, состоящего из 100 строк, потребуется выполнить расчет 600•100= 60000 точек.
В этом случае расчет сводится к простому считыванию из запоминающего устройства с последующим суммированием.
При современной схемотехнике такую операцию можно выполнить за 1/100 мкс. Нетрудно подсчитать, что все изображение будет рассчитано за 60000/100= 600 мкс.
Запись поля в память займет 60 мкс и, следовательно, полное время получения изображения составит 660 мкс, а соответствующая частота может превышать 1000 Гц.
Если эта скорость оказывается недостаточной, ее можно повысить разными способами:
а) путем разделения полевого запоминающего устройства на несколько параллельно считываемых "подпамятей";
б) выбирая и обрабатывая лишь одну область запоминающего устройства, содержащую полезную информацию.
Следует заметить, что ультразвуковые колебания часто имеют форму кратковременного импульса, содержащего несколько периодов. При этом может оказаться целесообразным использовать несколько гипербол, пересекающих чередующиеся полупериоды. Если длительность импульса невелика и он содержит только один полный период, то одну гиперболу можно использовать для повторного считывания положительного полупериода и, на расстоянии, соответствующем одному полуперироду, для повторного считывания отрицательного полупериода. Если значения, полученные в результате этих повторных считываний, равны Рр и Рm, то записано будет значение Р= Рр-Рm. Благодаря такому решению можно повысить отношение сигнал/шум и разрешающую способность системы. Эти два считывания можно производить последовательно, что приведет к снижению скорости, или параллельно, с использованием двух групп запоминающих устройств.
В вышеописанном примере осуществления способа осуществлялся прием отраженных волн. Однако, предложенный способ может опираться и на прием волн, пропущенных объектом, с использованием отдельных передающей и приемной антенн, располагаемых по разные стороны от исследуемого объекта.
Способ согласно изобретению обладает по сравнению с последовательными методиками рядом преимуществ.
Скорость. При каждом "выстреле" производится исследование значительной поверхности - порядка 100•5 мм, тогда как последовательный метод дает результат лишь 3•3 мм.
Скорость развертки может быть увеличена по сравнению с последовательной методикой в 50-100 раз, что представляет очень существенный выигрыш.
Быстродействие системы открывает дорогу многочисленным применениям, например в получении трехмерных изображений и в формировании изображений путем обработки доплеровских сигналов.
Трехмерные изображения легко получить, пользуясь матричным зондом, но при этом приходится работать с исключительно громоздкими электронными схемами, поскольку количество элементов такого зонда очень велико. Однако его можно существенно уменьшить, если применить случайное распределение этих элементов по поверхности зонда, что позволит разнести их на большее расстояние без разрастания побочных лепестков. При работе с линейным зондом возможна быстрая запись целого ряда плоскостей "разреза" путем смещения плоскости разреза между каждыми двумя следующими друг за другом "выстрелами". При рабочей частоте 100 Гц можно записать 100 плоскостей разреза в течение 1/10 с. После этого можно приступить к работе с запоминающими устройствами с целью получения трехмерного изображения или вида в разрезе в любой плоскости.
Что касается доплеровского формирования изображений, то возможность применения изобретения в этой сфере объясняется тем, что могут быть подвергнуты сравнению последовательные изображения. При записи высокочастотного сигнала возможно выявление (например, методом вычитания) и показ малейших различий между двумя изображениями.
Разрешающая способность. Система работает с исключительно большой апертурой. На практике пространственное разрешение ограничено лишь большим из двух значений - длины волны и размера одного элемента. Так, в приведенном выше примере большим из этих значений было значение длины волны, равное 2 мм. При частоте 10 МГц таковым было бы значение размера элемента - в данном случае 1 мм.
Воспроизводимость. Изменение чувствительности системы в зависимости от положения препятствия перед зондом очень невелико, к тому же поле излучается в виде плоской волны. Кроме того, изменение чувствительности системы в зависимости от положения может быть вычислено и, следовательно, скорректировано, так как точно известно положение каждого препятствия относительно зонда.
Система может работать с излучаемыми волнами, имеющими любые фронты (плоские, плоские наклонные, цилиндрические). Достаточно лишь рассчитать в каждом конкретном случае форму гипербол считывания в соответствии с их положением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Генератор упругих импульсов для разрушения почечных камней и камней в мочевом пузыре | 1986 |
|
SU1639421A3 |
| Устройство для локального разрушающего воздействия на структуру биообъекта | 1989 |
|
SU1804315A3 |
| Устройство для ультразвуковой обработки | 1989 |
|
SU1829928A3 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Устройство для анализа структурной характеристики показателя преломления атмосферы | 1991 |
|
SU1800426A1 |
| Устройство для селекции изображений объектов | 1988 |
|
SU1583949A1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2007 |
|
RU2362210C1 |
| СПОСОБ КОММУТАЦИИ ШИРОКОПОЛОСНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1987 |
|
RU2105428C1 |
| ФОТОКОЛОРИМЕТР-РЕФЛЕКТОМЕТР | 2001 |
|
RU2187789C1 |
Способ и устройство предназначены для обработки сигналов, характеризующих волны, которые отражены или пропущены некоторым объектом (О), для проведения анализа структуры этого объекта. Способ включает излучение волн, падающих на указанный объект, прием волн, отраженных или пропущенных структурами, встретившимися на пути падающей волны внутри объекта (О), рядом независимых друг от друга обнаруживающих элементов (D1, Dn); преобразование полученной информации в цифровую форму с ее последующей записью в полевое запоминающее устройство (МС), расчет для каждой точки (Pij) объекта позиций ячеек, которые заняты в полевом запоминающем устройстве сигналами, обнаруженными указанными элементами (D1, Dn) в данный момент и соответствующими волнами, которые отражены или пропущены точкой (Pij), и, наконец, проведение над всеми содержащимися в полевом запоминающем устройстве данными, относящимися к каждой точке (Pij), операций, результат (Vp) которых позволяет определить амплитуду волны, отраженной или пропущенной точкой (Pij). Техническим результатом является упрощение способа исследования и анализа структуры объектов. 2 с. и 15 з. п. ф-лы, 2 ил.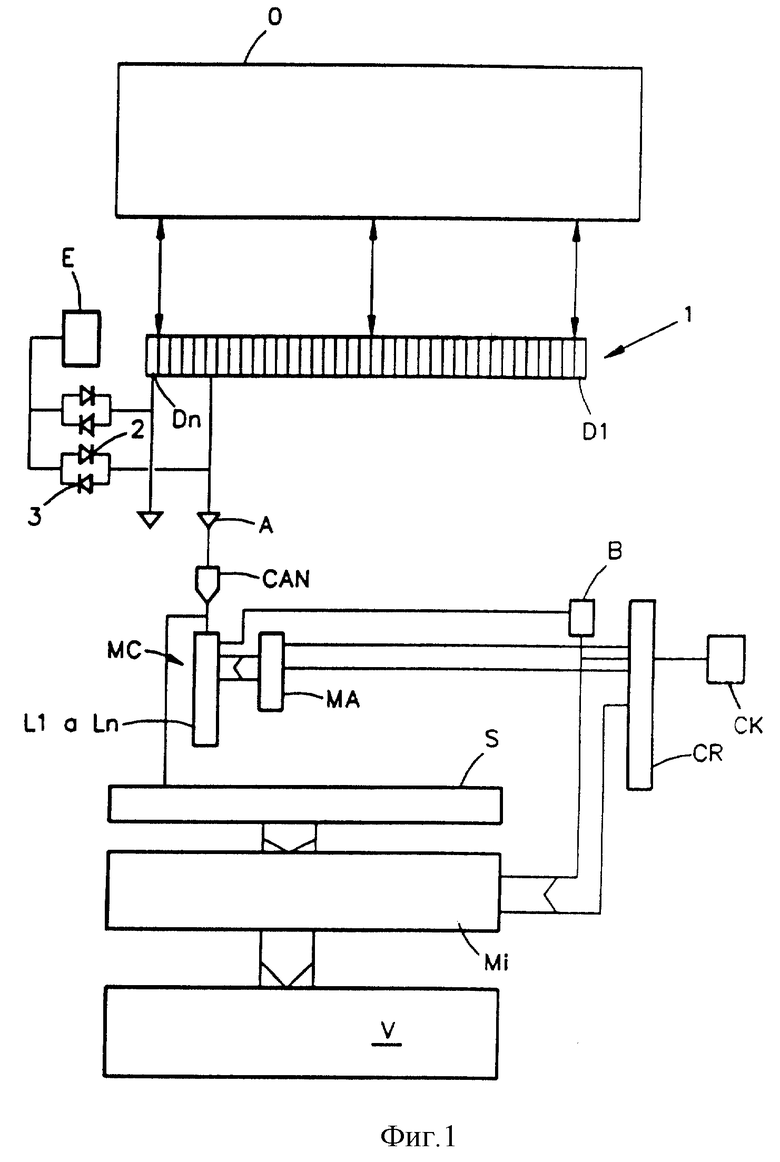
| RU 94006268 А1, 20.12.1995 | |||
| RU 94013378 А1, 10.06.1996 | |||
| ЕР 0612502 А1, 30.08.1994 | |||
| US 4452082 А, 05.06.1984. |

