Изобретение относится к области систем спутниковой связи и может быть использовано для приема сигналов подвижных спутниковых служб систем спутниковой связи (ССС) в условиях действия преднамеренных или не преднамеренных помех в диапазоне частот как самой системы связи, так и глобальных навигационных спутниковых систем (ГНСС), например, для приема сигналов низкоорбитальных систем спутниковой связи абонентскими терминалами телекоммуникационных систем, расположенных на подвижных носителях.
Для приема сигналов спутниковых систем связи в условиях действия преднамеренных или не преднамеренных помех используют возможности направленных свойств антенных систем. Однако для применения этих свойств необходимы сведения о пространственном (в том числе угловом) положении таких антенных систем, особенно, расположенных на подвижных носителях. Как правило, пространственное положение оценивается с применением навигационной аппаратуры потребителя (ПАП) ГНСС, которая в условиях действия помех может не обеспечивать требуемую точность.
Известен способ обеспечения помехозащищенности навигационного комплекса транспортного средства (1 - Антонов Д.А., Веремеенко К.К., Жарков М.В., Кузнецов И.М. Алгоритмическое обеспечение помехозащищенного навигационного комплекса транспортного средства // Известия ТулГУ. Технические науки, 2016. - Вып. 16. - С. 63-77).
Он заключается в одновременном приеме сигналов ГНСС и измерении параметров трехосным микромеханическим инерциальным блоком чувствительных элементов, одометрическим датчиком (ОД) и датчиком поворота рулевого колеса транспортного средства (ТС), пересчете значений всех измеренных параметров в единой системе координат, осуществлении с целью обнаружения скачкообразных изменений, превышающих установленный порог, допускового контроля - контроля максимально возможных приращений псевдодальностей и псевдоскоростей между эпохами, определении порога, исходя из ограничений на динамику ТС, осуществлении допускового контроля по уровню соотношения сигнал/шум и углам возвышения навигационных космических аппаратов (НКА) с целью исключения из решения сигналов НКА с уровнем соотношения сигнал/шум ниже установленного порога и углом возвышения меньше угла маскирования, реализации двухканальной бесплатформенной инерциальной навигационной системы (БИНС) и системы счисления горизонтальных координат по показаниям одометра, реализации начальной выставки БИНС и системы счисления координат по показаниям ОД, учете кинематических особенностей динамики ТС, вычислении прогнозируемых значений псевдодальностей и псевдоскоростей, формировании групп «рабочих», «сопровождаемых» и опорного НКА, контроле приращений псевдодальностей и псевдоскоростей между текущей и предыдущей эпохой на основе измерений ГНСС приемника и прогноза псевдодальностей/псевдоскоростей и дисперсий ошибок их прогноза на базе рекуррентного оптимального стохастического фильтра Калмана по данным группы «рабочих» НКА, выявлении на основе контроля приращений скачкообразных и быстронарастающих погрешностей в определении псевдодальностей и псевдоскоростей, выявлении медленно нарастающих погрешностей в определении псевдодальностей и псевдоскоростей на основе оптимального дискретного фильтра Калмана с использованием волнового представления погрешностей «сопровождаемых» и опорного НКА, перераспределении НКА по группам «рабочих», «сопровождаемых» и «исключенных», перестройке вектора состояния, оценивании вектора состояния на основе дискретного стохастического фильтра Калмана.
Способ позволяет обеспечить помехозащищенность навигационного комплекса ТС на основе оценки погрешности и, при необходимости, исключения из решения до (m - 4) НКА одновременно (m - число НКА рабочего созвездия).
Недостатками способа являются необходимость дополнительно с приемом сигналов ГНСС измерения параметров трехосным микромеханическим инерциальным блоком чувствительных элементов, ОД и датчиком поворота рулевого колеса ТС, что усложняет техническую реализацию, а также невозможность определения пространственной ориентации объекта и осуществления помехозащищенного приема сигналов ССС на основе пространственной селекции сигналов и помех.
Известен способ формирования однолучевой диаграмм направленности с максимальным коэффициентом направленного действия (КНД) (2, с. 148 - Зелкин Е.Г., Соколов В.Г. Методы синтеза антенн: Фазированные антенные решетки и антенны с непрерывным раскрывом. - М.: Сов. радио, 1980. - 296 с.). Он основан на взвешивании сигналов принятых каждым из антенных элементов (АЭ) антенной решетки (АР) с последующим их суммированием, при котором вектор весовых коэффициентов (ВВК) АР находят как главный вектор пучка эрмитовых форм, соответствующий наибольшему характеристическому числу пучка, причем при определении главного вектора пучка используют априорную информацию об угловой ориентации (направлении) максимума диаграммы направленности (ДН), а в качестве первой и второй эрмитовых форм пучка используют соответственно квадрат модуля ДН в направлении максимума луча и среднее значение ДН по мощности.
Способ обеспечивает формирование многолучевых ДН с максимальным КНД. Однако он не учитывает изменение сигнально-помеховой обстановки и, следовательно, не обеспечивает высокую помехозащищенность. Кроме того, он не позволяет выполнить определение пространственной ориентации объекта и помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции не только полезных сигналов, но и помех.
Известен способ формирования многолучевых диаграмм направленности с максимальным КНД (3 - Патент РФ №2249890, МПК: H01Q 3/26. Способ формирования многолепестковых диаграмм направленности антенной решетки. Патентообладатели и авторы - Мануйлов Б.Д., Башлы П.Н., Безуглов Ю.Д., Кузнецов А.А. Опубл. - 10.04.2005 г., 4 - Патент РФ №2614030, МПК: H01Q 3/26. Способ формирования многолучевой диаграммы направленности самофокусирующейся адаптивной антенной решетки. Патентообладатель - ФГБУ «ЦНИИ ВВКО Минобороны России». Зайцев А.Г. Опубл. - 22.03.2017 г.). Он основан на взвешивании сигналов принятых каждым из АЭ АР с последующим их суммированием и обеспечивает формирование многолучевых ДН с максимальным КНД при приеме сигналов с линейными волновыми фронтами [3] или при наличии амплитудно-фазовых флуктуаций сигналов источников излучения на элементах АР [4].
Поскольку этот способ не учитывает изменение сигнально-помеховой обстановки, он не обеспечивает высокую помехозащищенность. Кроме того, он не обеспечивает определение пространственной ориентации объекта и помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции не только полезных сигналов, но и помех.
Известен способ адаптивной пространственной фильтрации сигналов, реализованный в адаптивной АР (5 - Патент США №4713668, МПК: G01S 3/16, G01S 3/28. Adaptive antenna. Date of Patent - 15.12.1987). Он заключается в приеме сигналов N пространственно-разнесенными АЭ, расчете весовых коэффициентов (ВК) и взвешенном суммировании принятых сигналов. При этом расчет ВК осуществляется по алгоритму максимизации отношения сигнал/(шум + помеха) на выходе адаптивной антенной решетки, согласно выражению

где Wt(t) - текущее значение i-го ВК;
Δt - интервал временной дискретизации;
μ - коэффициент передачи;
Vyi - значение i-го управляющего сигнала;
Y(t) - взвешенно суммированный (выходной) сигнал;
 - сигнал, принятый i-м АЭ;
- сигнал, принятый i-м АЭ;
* - знак операции комплексного сопряжения.
Однако применение этого способа основывается на предположении, что управляющие сигналы Vyi,  точно определяют направление прихода полезного сигнала, его частоту и учитывают характеристики АЭ, их расположение и взаимное влияние, в частности, на предположении выполнения равенств
точно определяют направление прихода полезного сигнала, его частоту и учитывают характеристики АЭ, их расположение и взаимное влияние, в частности, на предположении выполнения равенств
где Vci,  - сигналы, описывающие волновой фронт полезного сигнала.
- сигналы, описывающие волновой фронт полезного сигнала.
Поскольку в реальных условиях направление прихода полезного сигнала θс известно, как правило, лишь с точностью до некоторого углового сектора θс∈[θу1,θу2], где θу1,θу2 - левая и правая границы сектора, в пределах которого ожидается приход полезного сигнала, то эти равенства не выполняются и применение способа может привести к непреднамеренному подавлению полезного сигнала. Глубина непреднамеренного подавления полезного сигнала прямо пропорционально зависит от входного отношения сигнал/(шум + помеха) и величины ошибки в априорных данных о направлении прихода полезного сигнала.
В связи с этим недостатком является то, что способ имеет низкую помехозащищенность, и кроме того, он не обеспечивает определение пространственной ориентации объекта и помехозащищенный прием сигналов ССС на основе пространственной селекции не только полезных сигналов, но и помех.
Известен способ адаптивной пространственной фильтрации сигналов, реализованный в адаптивной АР (6 - Патент РФ №2141706, МПК: H01Q 21/00. Способ и устройство адаптивной пространственной фильтрации сигналов. Патентообладатель - Военная академия связи. Комарович В.Ф., Марчук Л.А., Прасько А.Д., Спирин С.В. Опубл. - 20.11.1999 г.). Он заключается в приеме сигналов в N пространственно разнесенных точках, где N>2, генерации первого и второго опорного сигналов с частотами ω1 и ω2, где ω1<ω0-Δω, ω2>ω0+Δω, ω0 - несущая частота принимаемого полезного сигнала, Δω - ширина спектра принимаемого полезного сигнала, разделении каждого из них на N равноамплитудных составляющих, сдвиге по фазе каждой составляющей на предварительно заданную величину фазы, суммировании i-го принятого сигнала с i-ми составляющими первого и второго опорного сигналами, расчете ВК по формуле

где  - суммарный сигнал от сложения z'-го принятого сигнала и i-x составляющих первого и второго опорных сигналов, взвешенном суммировании принятых сигналов.
- суммарный сигнал от сложения z'-го принятого сигнала и i-x составляющих первого и второго опорных сигналов, взвешенном суммировании принятых сигналов.
Способ позволяет повысить помехозащищенность приема полезных сигналов при отсутствии точной априорной информации о направлении прихода полезного сигнала. Недостаток способа - он не обеспечивает определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью, а также помехозащищенный прием сигналов ССС на основе пространственной селекции не только полезных сигналов, но и помех.
Известен способ помехозащищенного приема сигналов антенными решетками (7, с. 14 - Ратынский М.В. Адаптация и сверхразрешение в антенных решетках. М.: Радио и связь, 2003. - 200 с), реализованный в изделии «Комета» (8 - Малогабаритная адаптивная антенная решетка. ВНИИР-Прогресс // http://www.vniir-progress.ru/upload/gnss.pdf, 9 - Патент РФ на полезную модель №124517, МПК: H01Q 23/00. Малогабаритная адаптивная антенная решетка. Патентообладатель - ОАО «ВНИИР-Прогресс. Харисов В.Н., Ефименко B.C., Пастухов А.В., Головин П.М., Павлов B.C. Опубл. - 27.01.2013 г., 10 - Патент РФ на полезную модель №154701, МПК: G12B 9/02, H01Q 21/00, H01Q 23/00. Малогабаритная адаптивная моноблочная антенная система. Патентообладатель - Российская Федерация, от имени которой выступает Министерство промышленности и торговли РФ. Харисов В.Н., Ефименко B.C., Пастухов А.В., Головин П.М., Павлов B.C., Чеботарев А.В. Опубл. - 16.03.2015 г.), обеспечивающий помехозащищенный прием полезных сигналов на основе пространственной селекции только помеховых сигналов. Он реализуется путем формирования провалов диаграмм направленности антенных решеток. Максимальное количество подавляемых пространственно-разнесенных помех определяется в общем случае количеством АЭ АР N и составляет N-1.
Недостаток способа - он не обеспечивает определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью, а также помехозащищенный прием сигналов ССС на основе пространственной селекции не только помех, но и пространственно-разнесенных источников полезных сигналов.
Известен способ помехозащищенного приема АР одного полезного сигнала с заданного направления (11 - Патент РФ №2314610, МПК: H01Q 3/26, H01Q 21/00. Способ энергетической оптимизации фазированной антенной решетки. Патентообладатели и авторы - Башлы П.Н., Мануилов Б.Д. Опубл. - 10.01.2008 г., 12 - Патент РФ №2507646, МПК: H01Q 3/26. Способ формирования провалов в диаграммах направленности фазированных антенных решеток в направлениях источников помех. Патентообладатель - ФГУП «РНИИРС». Мануйлов Б.Д., Падий А.Ю. Опубл. - 20.02.2014 г., 13 -Патент РФ №2559763, МПК: H01Q 3/00. Способ формирования провалов в направлениях источников помех в диаграммах направленности плоских фазированных антенных решеток с непрямоугольной границей раскрыва. Патентообладатель - ФГУП «РНИИРС». Мануйлов Б.Д., Падий А.Ю. Опубл. -27.12.2014 г., 14 - Патент РФ №2713715, МПК: H01Q 3/26. Способ формирования провалов в диаграммах направленности активных фазированных антенных решеток в направлениях источников помех. Патентообладатель - ФГУП «РНИИРС». Бородовский С.А., Мануйлов Б.Д., Мануйлов Д.Б., Падий А.Ю. Опубл. - 26.04.2019 г.). Он реализуется путем формирования провалов диаграмм направленности антенных решеток, а для повышения оперативности управления диаграммной направленности в нем сокращается число управляемых элементов АР.
Недостаток способа - он не обеспечивает определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью, а также помехозащищенный прием сигналов ССС на основе пространственной селекции не только помех, но и пространственно-разнесенных источников полезных сигналов.
Известен способ помехозащищенного приема АР одного полезного сигнала с заданного направления, реализуемый путем формирования провалов диаграмм направленности антенных решеток с удвоенным максимальным количеством подавляемых пространственно-разнесенных помех (15 - Патент РФ №2287880, МПК: H01Q 21/29, H01Q 3/26. Способ формирования диаграммы направленности адаптивной антенной решетки. Патентообладатель - Военная академия связи. Комарович В.Ф., Марчук Л.А., Прасько А.Д., Спирин С.В. Опубл. - 20.11.1999 г.).
Способ позволяет обеспечить помехозащищенный прием сигналов ГНСС или ССС на основе пространственной селекции помех. Недостаток - он не обеспечивает определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью, а также помехозащищенный прием сигналов ССС на основе пространственной селекции не только помех, но и пространственно-разнесенных источников полезных сигналов.
Известен способ помехозащищенного приема сигналов, реализованный в цифровых антенных решетках (16 - Пономарев Л.И., Вечтомов В.А., Милосердов А.С. Бортовые цифровые многолучевые антенные решетки для систем спутниковой связи. М.: Издательство МГТУ им. Н.Э. Баумана, 2016. -197 с, 17 - Патент РФ №2697194, МПК: G01S 13/00. Способ построения активной фазированной антенной решетки. Патентообладатель - ФГУП «РНИИРС». Косогор А.А., Задорожный В.В., Ларин А.Ю., Омельчук И.С. Опубл. - 13.08.2019 г., 18 - Зимин А.С., Криницкий Г.В. Применение многоантенных систем для повышения помехозащищенности систем спутниковой радионавигации на подвижных объектах // Электронный журнал «Труды МАИ». - Выпуск №51) на основе пространственной селекции одновременно как полезных, так и помеховых сигналов. Он строится путем формирования ДН АР с локальными максимумами в направлении полезных сигналов и локальными минимумами в направлении помеховых сигналов.
Способ позволяет обеспечить помехозащищенный прием сигналов ГНСС или ССС на основе пространственной селекции как полезных сигналов, так и помех. При этом число формируемых локальных экстремумов ДН АР определяется числом АЭ. Недостаток способа - он не обеспечивает определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью, а также помехозащищенный прием сигналов одновременно ССС и ГНСС на основе пространственной селекции помех и полезных сигналов при существенно изменяющихся условиях приема.
Известен способ помехозащищенной спутниковой навигации высоко динамичного маневрирующего в вертикальной плоскости объекта, реализованный в системе спутниковой навигации крылатой ракеты (19 - Патент РФ №2650582, МПК: H01Q 1/28. Система спутниковой навигации крылатой ракеты (варианты). Патентообладатель - АО «Военно-промышленная корпорация «Научно-производственное объединение машиностроения». Леонов А.Г., Матросов А.В., Титов А.П. Опубл. 16.04.2018 г.), обеспечивающий определение пространственной ориентации объекта в движении, использующий дополнительные антенные элементы для приема сигналов спутников ГНСС при существенно изменяющихся условиях приема. Антенна основной антенной системы, размещенная в верхней части крылатой ракеты под радиопрозрачным обтекателем, осуществляет прием сигналов спутников ГНСС в режиме горизонтального полета. В случае смены режима полета от маршевого (горизонтального) к переходу в пикирование и дальнейшему вертикальному полету (пикированию) навигационный помехозащищенный приемник обрабатывает сигнал от дополнительной антенной системы, размещенной в передней торцевой части крылатой ракеты по окружности корпуса под радиопрозрачным обтекателем.
Таким образом, прием и обработка сигналов с использованием дополнительных антенных элементов позволяют в случае существенного изменения условий приема - смены режима полета с горизонтального на вертикальный, обеспечить помехоустойчивость и определение углового положения высокодинамичного объекта в движении с требуемой точностью и оперативностью.
Недостаток - этот способ не позволяет определять угловое положение неподвижного объекта, а также не позволяет реализовать одновременный помехозащищенный адаптивный по количеству источников помех прием сигналов ССС и ГНСС на основе пространственной селекции помех и полезных сигналов.
Известны способы управления полетом летательного аппарата по сигналам ГНСС, описанные в способе навигационной системы GPS летательного аппарата с двойным резервированием и защитой от помех (20 -Патент РФ №2336537, МПК: G01S 1/00. Архитектура и способ навигационной системы GPS летательного аппарата с двойным резервированием и защитой от помех. Патентообладатель - Нортроп Грамман Корпорейшн. Лоджеринг Г.С. Опубл. - 20.10.2008 г.), обеспечивающие определение пространственной ориентации объекта в движении, использующие дополнительные антенные системы и навигационные блоки для одновременного применения различных способов подавления помех. Первый из них включает этапы использования первой антенны для приема сигнала системы глобального позиционирования и использования второй антенны для приема сигнала системы глобального позиционирования, дополненные этапами подавления помехи в сигнале системы глобального позиционирования с использованием первого способа подавления помехи для формирования первого сигнала системы глобального позиционирования с подавленной помехой, управления первым навигационным блоком в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой, подавления помехи в сигнале системы глобального позиционирования с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, для формирования второго сигнала системы глобального позиционирования с подавленной помехой, управления вторым навигационным блоком в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой, и использования, по меньшей мере, одного из первого и второго навигационных блоков для управления полетом летательного аппарата.
Второй из рассмотренных в [20] способов включает этапы использования первой антенны для приема сигнала системы глобального позиционирования и использования второй антенны для приема сигнала системы глобального позиционирования, дополненные этапами подавления помехи в сигнале системы глобального позиционирования с использованием первого способа подавления помехи для формирования первого сигнала системы глобального позиционирования с подавленной помехой, управления первым навигационным блоком в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой, подавления помехи в сигнале системы глобального позиционирования с использованием второго способа подавления помех, отличающегося от первого способа подавления помех, для формирования второго сигнала системы глобального позиционирования с подавленной помехой, управления вторым навигационным блоком в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой, и управления третьим навигационным блоком в соответствии с первым сигналом системы глобального позиционирования с подавленной помехой, управления четвертым навигационным блоком в соответствии со вторым сигналом системы глобального позиционирования с подавленной помехой, и использования, по меньшей мере, одного из первого, второго, третьего и четвертого навигационных блоков для управления полетом летательного аппарата.
Третий из рассмотренных в [20] способов составляет первый или второй способы, в которых первый способ подавления помех представляет собой способ управления провалом диаграммы направленности антенны, и второй способ подавления помех представляет собой способ различия по поляризации волнового фронта.
Четвертый из рассмотренных в [20] способов составляет первый или второй способы, в которых первая антенна представляет собой антенну с управляемой диаграммой направленности излучения антенны.
Эти способы на основе избыточности антенн и навигационных блоков обеспечивают повышение помехозащищенности за счет расширения возможных вариантов помеховой обстановки.
Недостатком способов [20] является то, что они не обеспечивают определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью при отсутствии движения носителя, а также одновременный помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции помех и полезных сигналов.
Известен способ повышения помехозащищенности системы спутниковой навигации передвижного ракетного комплекса (21 - Патент РФ №2674403, МПК: G01C 21/00, H01Q 1/40. Система спутниковой навигации передвижного ракетного комплекса. Патентообладатель - АО «Военно-промышленная корпорация «Научно-производственное объединение машиностроения». Дергачев А.А., Измалкин О.С., Буланников В.В., Рябов Д.А., Матросов А.В., Титов А.П. Опубл. - 7.12.2018 г.), обеспечивающий определение местоположения объекта при изменении помеховой обстановки.
В соответствии с [21], система спутниковой навигации передвижного ракетного комплекса содержит аппаратуру спутниковой навигации и антенную систему, выполненную помехозащищенной в виде независимых блоков: антенны системы спутниковой навигации и блока обработки информации, при этом антенна выполнена в виде отдельных, в количестве N (не менее четырех) основных антенных элементов приема спутниковых сигналов, предназначенных для обеспечения работы одного канала спутниковой связи, каждый антенный элемент независимо соединен с блоком обработки информации, причем антенна размещена в верхней части элементов комплекса под радиопрозрачным защитным кожухом. Кроме того, для обеспечения приема спутниковых сигналов по дополнительному каналу спутниковой связи антенна системы спутниковой навигации содержит не менее одного дополнительного антенного элемента приема спутниковых сигналов, соединенного с блоком обработки информации независимым кабелем, причем количество независимых кабелей соответствует количеству дополнительных антенных элементов.
При увеличении количества пространственно-распределенных источников помех относительно N-1 на величину М, подсоединяются М дополнительных антенных элементов приема спутниковых сигналов и в блоке обработки информации формируется N+M-1 провалов диаграммы направленности в направлении на источники помех.
Этот способ на основе избыточности антенн и использования дополнительных входов блока обработки информации (навигационного блока) обеспечивает повышение помехозащищенности за счет расширения возможных вариантов помеховой обстановки.
Недостаток способа - он не обеспечивает определение пространственной ориентации объекта (антенной решетки) с требуемой точностью и оперативностью при отсутствии движения носителя, а также одновременный помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции помех и полезных сигналов.
Известен способ определения угловой ориентации объекта (22 - Степанов О.А., Кошаев Д.А. Исследование методов решения задачи ориентации с использованием спутниковых систем // Гироскопия и навигация. - 1999. - №2. - С. 30-55; 23 - Патент РФ №2578671, МПК: (2010.01) G01S 5/02. Способ определения угловой ориентации летательного аппарата в среде глобальных радионавигационных систем. Патентообладатель - ОАО «Научно-исследовательский институт точных приборов». Корнев В.В., Чмутин Н.Ф. Опубл. - 27.03.2016 г.; 24 - Патент РФ №2276384, МПК: (2006.01) G01S 5/00. Способ определения угловой ориентации объекта. Патентообладатель - Тульский государственный университет. Богданов М.Б., Прохорцов А.В., Савельев В.В. Опубл. - 10.05.2006 г.; 25 - Патент РФ №2422844, МПК: (2006.01) G01S 5/00. Способ определения угловой ориентации объекта. Патентообладатель - ГОУ ВПО Тульский государственный университет. Богданов М.Б., Савельев В.В., Смирнов В.А., Прохорцов А.В., Чепурин А.А. Опубл. - 20.07.2010 г.), основанный на приеме сигналов от спутников ГНСС на пространственно-разнесенные антенны с известным взаимным расположением, выделении информации о положении спутников ГНСС, определении углового положения спутников по разности фаз сигналов, поступающих от спутников на разнесенные антенны, формировании угловой ориентации объекта по данным о положении спутников ГНСС и об угловом положении спутников относительно антенн в случае приема сигналов не менее тремя антеннами от не менее трех спутников ГНСС [22], [23]. Если количество приемных антенн или число спутников ГНСС меньше трех, то для определения угловой ориентации объекта используется дополнительная информация от инерциальной навигационной системы [24], [25].
Способ позволяет определить угловую ориентацию объекта по сигналам спутников ГНСС как подвижного, так и неподвижного объекта. Недостаток - он не обеспечивают защиту от действия помех при определении пространственного положения объекта, а также одновременный помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции помех и полезных сигналов.
Известен способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов (26 - Патент РФ №2618520, МПК: (2006.01) G01S 1/00, (2010.01) G01S 5/02. Способ угловой ориентации объекта по радионавигационным сигналам космических аппаратов. Патентообладатель - Федеральное государственное автономное образовательное учреждение высшего образования «Сибирский федеральный университет». Тяпкин В.Н., Ратушняк В.Н., Дмитриев Д.Д., Гладышев А.Б., Кремез Н.С. Опубл. - 04.05.2017 г.), обеспечивающий помехоустойчивое определение пространственной ориентации объекта с повышенной точностью как в процессе его движения, так и во время его стоянки, принятый за прототип.
Он заключается в приеме аддитивной смеси помехи и сигналов от K навигационных космических аппаратов тремя или более приемными каналами, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны двум или более осям объекта, суммировании сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех, выделении радионавигационных сигналов от K навигационных космических аппаратов, восстановлении их исходных параметров в каждом приемном канале, измерении фазовых сдвигов между сигналами от каждого из n навигационных космических аппаратов между парами приемных каналов и определении углового положения объекта, причем перед суммированием сигналов осуществляют их дискретную временную задержку, а весовые коэффициенты вычисляют для каждой дискреты задержки и восстанавливают исходные параметры радионавигационных сигналов от K навигационных космических аппаратов с учетом соответствующей дискретной задержки.
Способ позволяет осуществить формирование провалов в направлении источников помех, например, итерационным расчетом, за счет использования рекуррентного алгоритма подстройки текущих весовых коэффициентов, направленного на уменьшение ошибки оценивания процесса адаптации и компенсации помех. Весовые коэффициенты вычисляются на основе рекуррентной оценки обратной корреляционной матрицы помех. Обратная корреляционная матрица помех содержит всю информацию об угловых положениях источников помех и излучаемой ими спектральной плотности мощности помехи. Увеличение коэффициента подавления помеховых колебаний и компенсация помех достигается путем пространственно-временной обработки сигналов приемных каналов за счет расчета весовых коэффициентов в каждом из отводов многоотводной линии задержки каждого канала. Именно вычисление весового коэффициента в каждой линии многоотводной линии задержки с определенным временем задержки и компенсирует межканальную задержку помехи каждого приемного канала и согласовывает в целом геометрию расположения приемных антенн с плоским волновым фронтом принимаемых помех. Вследствие такой пространственно-временной обработки сигналов повышается межканальный коэффициент корреляции помех в приемных каналах и максимизируется их подавление. Результирующее время задержки соответствует максимальному времени распространения помехи между разнесенными приемными антеннами.
Кроме того, при цифровой обработке сигналов происходит разделение радионавигационных сигналов каждого из навигационных космических аппаратов, а также поиск, захват сигналов по частоте, коррекция фазовых соотношений и задержек, частотная автоподстройка, синхронизация по метке времени и границе бита служебной информации, прием и декодирование служебной информации и измерение радионавигационных параметров радионавигационного сигнала. При приеме радионавигационных сигналов производится оптимальная оценка начальных фаз сигналов, принятых антеннами, вычисляются значения фазовых сдвигов сигналов, которые в дальнейшем используются для определения углового положения объекта (курс, крен, тангаж).
Таким образом, способ позволяет определить угловое положение объекта по сигналам спутников ГНСС как подвижного, так и неподвижного объекта, обеспечивает защиту от действия помех при определении пространственного положения объекта на основе пространственной селекции помех и полезных сигналов.
Недостатком способа-прототипа является невозможность реализовать одновременный помехозащищенный адаптивный по количеству источников помех прием сигналов ССС и ГНСС на основе пространственной селекции помех и полезных сигналов.
Технической проблемой является отсутствие технических средств одновременного помехозащищенного адаптивного по сигнально-помеховой обстановке приема сигналов ССС и ГНСС на основе пространственной селекции помех, полезных сигналов и определения пространственной ориентации антенной системы с требуемой точностью и оперативностью, расположенной как на подвижном, так и неподвижном носителе.
Для решения технической проблемы предлагается способ помехозащищенного приема сигналов систем спутниковой связи, при котором принимают аддитивную смесь помех и сигналов от K навигационных космических аппаратов L2 приемными каналами, L2≥2, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны Р осям объекта, Р равно 3, осуществляют дискретную временную задержку сигналов ГНСС, вычисляют весовые коэффициенты для каждой дискреты задержки, выполняют суммирование сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех, выделяют радионавигационные сигналы от K навигационных космических аппаратов, восстанавливают исходные параметры радионавигационных сигналов от K навигационных космических аппаратов с учетом соответствующей дискретной задержки, измеряют фазовые сдвиги между сигналами от каждого из K навигационных космических аппаратов между парами приемных каналов, определяют угловое положение объекта-носителя.
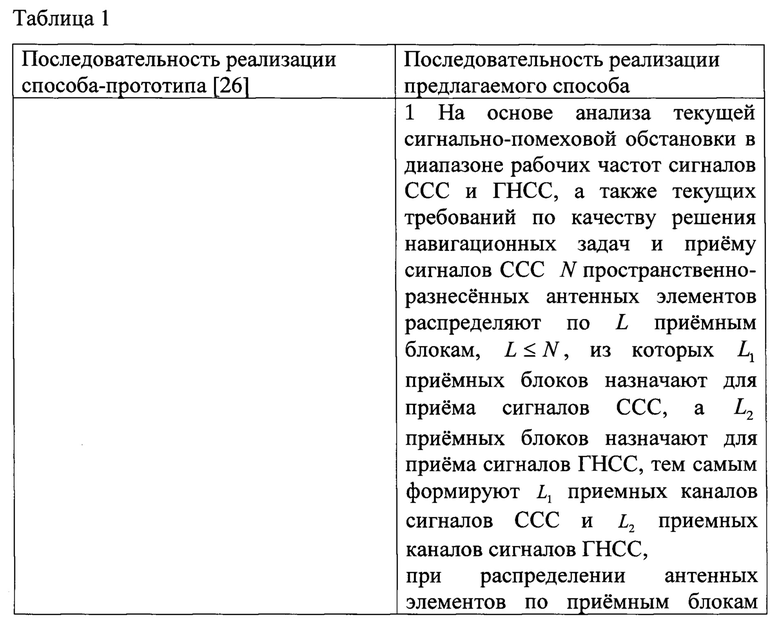
Согласно изобретению, дополнительно, до приема аддитивной смеси помех и сигналов от навигационных космических аппаратов на основе анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов ССС и ГНСС, а также текущих требований по качеству решения навигационных задач и приему сигналов ССС N пространственно-разнесенных антенных элементов распределяют по L приемным блокам (L≤N), из которых L1 приемных блоков назначают для приема сигналов ССС, a L2 приемных блоков назначают для приема сигналов ГНСС, тем самым формируют L1 приемных каналов сигналов ССС и L2 приемных каналов сигналов ГНСС, при распределении антенных элементов по приемным блокам учитывают топологию антенных элементов, их расположение на носителе и пространственное положение носителя, одновременно с приемом сигналов от навигационных космических аппаратов принимают аддитивную смесь помех и сигналов от Q космических аппаратов ССС L1 приемными каналами, до определения углового положения объекта-носителя, если текущее количество источников помеховых сигналов в диапазоне частот ГНСС равно М2, то из числа L2 приемных каналов формируют группы каналов по М2+1 каналов, одну из групп определяют как базовую, остальные - как «роверы», на основе помехозащищенного приема сигналов, реализованного на основе пространственной селекции М2 помех и полезных сигналов ГНСС, каждой группы каналов, обрабатываемых как оценки режима RTK, формируются RTK-оценки местоположения условных центров групп каналов, определение углового положения объекта-носителя выполняют на основе раздельных или совместных оценок по фазовым сдвигам или RTK-оценкам местоположения, после определения углового положения объекта-носителя для принятой аддитивной смеси помех и сигналов от Q космических аппаратов ССС L1 приемными каналами на основе данных о пространственном, включая угловое, положении объекта-носителя формируют Q диаграмм направленности антенной системы, каждая с максимумом в направлении своего космического аппарата ССС и до L1-1 провалов в направлении источников помех, действующих в диапазоне частот ССС, оценивают текущее качество приема сигналов ССС и, при необходимости, адаптивно перераспределяют антенные элементы по приемным блокам, а приемные каналы между приемом сигналов ГНСС и ССС.
Техническим результатом является адаптивный по сигнально-помеховой обстановке одновременный помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции помех, полезных сигналов и определение пространственной ориентации антенной системы с требуемой точностью и оперативностью, расположенной как на подвижном, так и неподвижном носителе.
Указанный технический результат достигают за счет введения новых операций: до приема аддитивной смеси помех и сигналов от навигационных космических аппаратов на основе анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов ССС и ГНСС, а также текущих требований по качеству решения навигационных задач и приему сигналов ССС N пространственно-разнесенных антенных элементов распределяют по L приемным блокам, L≤N, из которых L1 приемных блоков назначают для приема сигналов ССС, a L2 приемных блоков назначают для приема сигналов ГНСС, тем самым формируют L1 приемных каналов сигналов ССС и L2 приемных каналов сигналов ГНСС, при распределении антенных элементов по приемным блокам учитывают топологию антенных элементов, их расположение на носителе и пространственное положение носителя, одновременно с приемом сигналов от навигационных космических аппаратов принимают аддитивную смесь помех и сигналов от Q космических аппаратов ССС L1 приемными каналами, до определения углового положения объекта-носителя если текущее количество источников помеховых сигналов в диапазоне частот ГНСС равно М2, то из числа L2 приемных каналов формируют группы каналов по М2+1 каналов, одну из групп определяют как базовую, остальные - как «роверы», на основе помехозащищенного приема сигналов, реализованного на основе пространственной селекции М2 помех и полезных сигналов ГНСС, каждой группы каналов, обрабатываемых как оценки режима RTK, формируются RTK-оценки местоположения условных центров групп каналов, определение углового положения объекта-носителя выполняют на основе раздельных или совместных оценок по фазовым сдвигам или RTK-оценкам местоположения, после определения углового положения объекта-носителя для принятой аддитивной смеси помех и сигналов от Q космических аппаратов ССС L1 приемными каналами на основе данных о пространственном, включая угловое, положении объекта-носителя формируют Q диаграмм направленности антенной системы, каждая с максимумом в направлении своего космического аппарата ССС и до L1-1 провалов в направлении источников помех, действующих в диапазоне частот ССС, оценивают текущее качество приема сигналов ССС и при необходимости адаптивно перераспределяют антенные элементы по приемным блокам, а приемные каналы между приемом сигналов ГНСС и ССС.
На чертеже приведена структурная схема устройства, реализующего предлагаемый способ помехозащищенного приема сигналов систем спутниковой связи.
Сочетание отличительных признаков и свойств предлагаемого способа из литературы не известны, поэтому он соответствует критериям новизны и изобретательского уровня.
Способ помехозащищенного приема сигналов систем спутниковой связи реализуется следующим образом:
1. На основе анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов ССС и ГНСС, а также текущих требований по качеству решения навигационных задач и приему сигналов ССС N пространственно разнесенных антенных элементов распределяют по L приемным блокам, L≤N, из которых L1 приемных блоков назначают для приема сигналов ССС, a L2 приемных блоков назначают для приема сигналов ГНСС, тем самым формируют L1 приемных каналов сигналов ССС и L2 приемных каналов сигналов ГНСС, при распределении антенных элементов по приемным блокам учитывают топологию антенных элементов, их расположение на носителе и пространственное положение носителя.
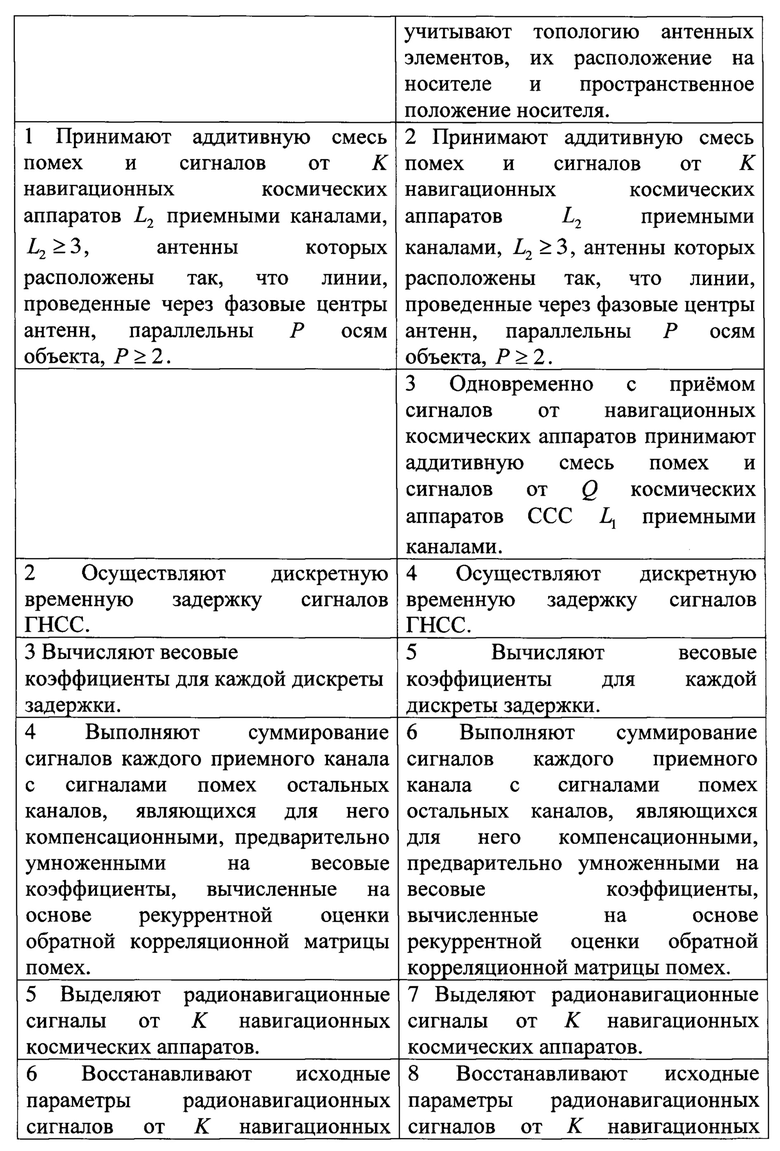
2. Принимают аддитивную смесь помех и сигналов от K навигационных космических аппаратов L2 приемными каналами, L2≥3, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны Р осям объекта, Р≥2.
3. Одновременно с приемом сигналов от навигационных космических аппаратов принимают аддитивную смесь помех и сигналов от Q космических аппаратов ССС L1 приемными каналами.
4. Осуществляют дискретную временную задержку сигналов ГНСС.
5. Вычисляют весовые коэффициенты для каждой дискреты задержки.
6. Выполняют суммирование сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех.
7. Выделяют радионавигационные сигналы от K навигационных космических аппаратов.
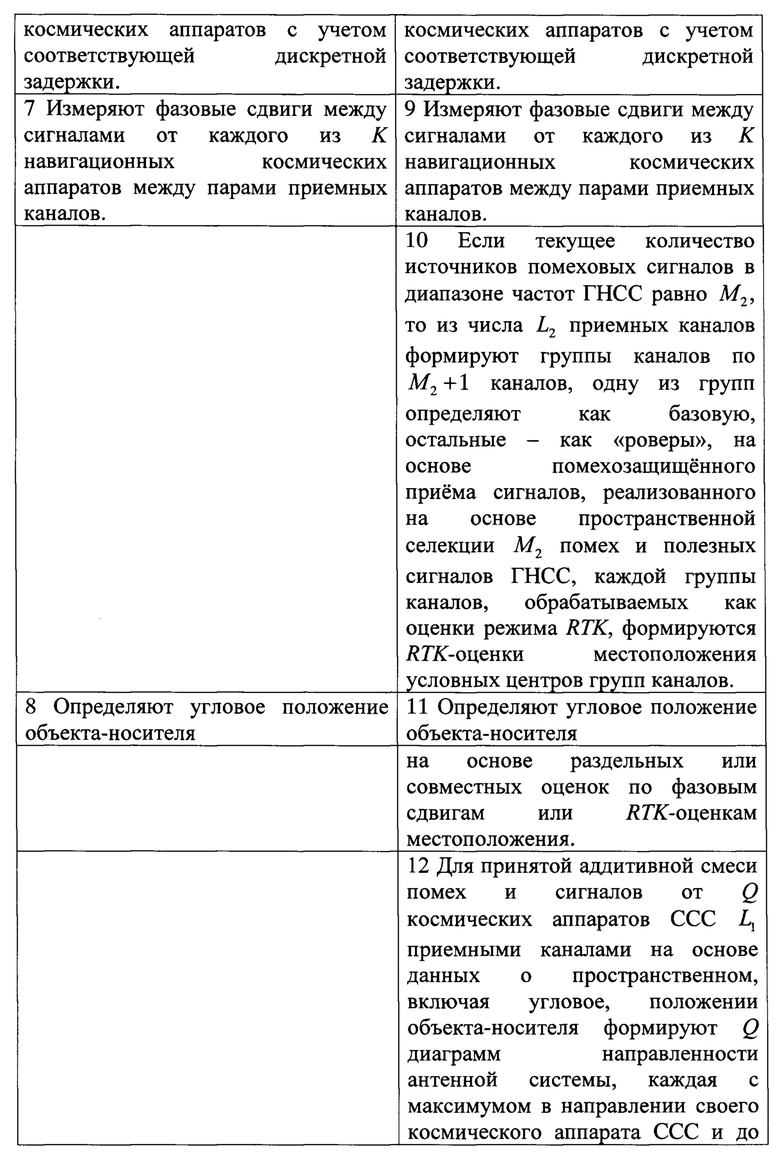
8. Восстанавливают исходные параметры радионавигационных сигналов от K навигационных космических аппаратов с учетом соответствующей дискретной задержки.
9. Измеряют фазовые сдвиги между сигналами от каждого из K навигационных космических аппаратов между парами приемных каналов.
10. Если текущее количество источников помеховых сигналов в диапазоне частот ГНСС равно М2, то из числа L2 приемных каналов формируют группы каналов по М2+1 каналов, одну из групп определяют как базовую, остальные - как «роверы», на основе помехозащищенного приема сигналов, реализованного на основе пространственной селекции М2 помех и полезных сигналов ГНСС, каждой группы каналов, обрабатываемых как оценки режима RTK, формируются RTK-оценки местоположения условных центров групп каналов.
11. Определяют угловое положение объекта-носителя на основе раздельных или совместных оценок по фазовым сдвигам или RTK-оценкам местоположения.
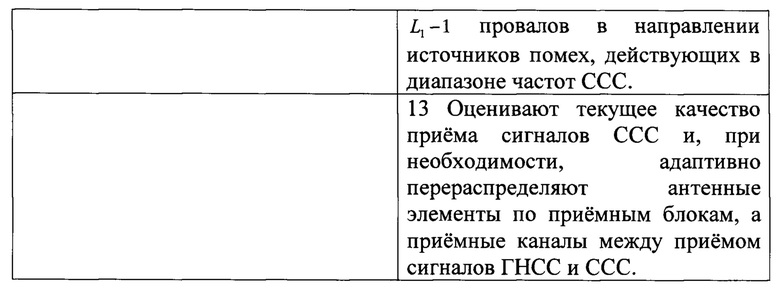
12. Для принятой аддитивной смеси помех и сигналов от Q космических аппаратов ССС L1 приемными каналами на основе данных о пространственном, включая угловое, положении объекта-носителя формируют Q диаграмм направленности антенной системы, каждая с максимумом в направлении своего космического аппарата ССС с максимумом в направлении своего космического аппарата ССС и до L1-1 провалов в направлении источников помех, действующих в диапазоне частот ССС.
13. Оценивают текущее качество приема сигналов ССС и, при необходимости, адаптивно перераспределяют антенные элементы по приемным блокам, а приемные каналы между приемом сигналов ГНСС и ССС.
Для реализации пункта 1 - анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов ССС и ГНСС, и на его основе, а также текущих требований по качеству решения навигационных задач и приему сигналов ССС, распределения N пространственно-разнесенных антенных элементов по L приемным блокам, назначения L1 приемных блоков для приема сигналов ССС, a L2 приемных блоков для приема сигналов ГНСС - сначала выполняют обнаружение излучений источников помех и определение их углового положения в связанной с объектом-носителем системе координат. На начальном этапе для решения этой задачи могут быть использованы L пространственно-разнесенных антенных элементов с L приемными блоками. Они формируют пеленгатор, в частности, корреляционный интерферометр (27 - Радио мониторинг - задачи, методы, средства /Под ред. A.M. Рябовского. 2-е изд., перераб. и доп.- М.: Горячая линия-Телеком, 2010. - 624 с.; 28 - Аверьянов А.В., Романцова Ю.А., Строев А.А., Сухенький И.А. Двухэтапный алгоритм работы многоканального корреляционно-интерферометрического пеленгатора, Общие вопросы радиоэлектроники. Ростов-на-Дону: ФГУП «РНИИРС», 2016, Вып. 1, с. 35-49.; 29 - Аверьянов А.В., Строев А.А. Обобщенная модель функционирования векторного многоканального корреляционного измерителя углового положения объекта и алгоритм его работы // Сборник трудов XXIII Международной научно-технической конференции «Радиолокация, навигация, связь». - Том 1. Воронеж: Издательство «Научно-исследовательские публикации». - 2017. - С. 160-171), который позволяет получить оценки углового положения источников помех в связанной с объектом-носителем системе координат. Для повышения точности оценок углового положения предварительно должна быть выполнена калибровка, например, на основе способа калибровки мобильного пеленгатора-корреляционного интерферометра с применением навигационной аппаратуры потребителя глобальной навигационной спутниковой системы (30 - Патент РФ №2573819, МПК: (2006.01) G01S 7/40. Способ калибровки мобильного пеленгатора-корреляционного интерферометра с применением навигационной аппаратуры потребителя глобальной навигационной спутниковой системы. Патентообладатель - ФГУП «РНИИРС». Колесников С.С., Строцев А.А., Сухенький И.А. Опубл. -27.01.2016 г.) или способа комплексной калибровки пеленгатора-корреляционного интерферометра на мобильном носителе (31 - Патент РФ №2640354, МПК: (2006.01) G01S 7/40. Способ комплексной калибровки пеленгатора-корреляционного интерферометра на мобильном носителе. Патентообладатель - ФГУП «РНИИРС». Емельянов Р.В., Житник М.А., Колесников С.С., Строцев А.А. Опубл. - 28.12.2017 г.).
Если требования к временным режимам приема и обработки ССС не позволяют выполнить временное накопление цифровых отсчетов для применения указанных расчетных схем, тогда применяется способ пеленгования источника радиоизлучения (32 - Патент РФ №2603356, МПК: (2006.01) G01S 5/04, G01S 3/10. Способ пеленгования источника радиоизлучения. Патентообладатель - Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации. Аверьянов А.В., Емельянов Р.В., Строцев А.А. Опубл. - 27.11.2016 г.), основанный на корреляции пространственных спектров одномоментных когерентных отсчетов комплексных амплитуд на выходах широкополосных пеленгационных каналов (33 - Аверьянов А.В., Строцев А.А. Методика оценки азимутальных пеленгов источников радиосигналов на основе корреляции пространственных спектров одномоментных когерентных отсчетов комплексных амплитуд на выходах широкополосных пеленгационных каналов // Труды XXI Международной НТК «Радиолокация, навигация и связь». - 2015. - С. 1521-1531.).
Выбор реализации пеленгатора может быть осуществлен на основе подхода, рассмотренного в работе (34 - Аверьянов А.В., Строцев А.А. Сравнительный анализ эффективности применения алгоритмов оценки углового положения источников сверхширокополосных сигналов // Радиотехника, т. 83, №7(9), 2019. - С. 32-40.).
При решении задачи оценки углового положения источников помех в связанной с объектом-носителем системе координат в текущей обстановке приема сигналов ССС и ГНСС для ее реализации выделяется L-L1-L2 приемных каналов.
Если для решения задачи оценки углового положения источников помех в связанной с объектом-носителем системе координат в текущей обстановке может быть выделен только один приемный канал, а объект-носитель движется, то оценить угловое положение источника OFDM помех можно в соответствии со способом определения углового положения источника OFDM сигналов (35 - Патент РФ №2688927, МПК: (2006.01) G01S 5/00. Способ определения углового положения источника OFDM сигналов. Патентообладатель - Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации. Аверьянов А.В., Гончаров П.П., Емельянов Р.В., Строцев А.А. Опубл. - 23.05.2019 г.), реализуемого на основе обобщенных решетчатых структур (36 - Аверьянов А.В., Гончаров П.П., Строцев А.А. Обобщенные решетчатые структуры для оценки углового положения источников радиоизлучения // 19-я Международная конференция «Цифровая обработка сигналов и ее применение-DSPA-2017». Доклады. Выпуск XIX, т. 1. М.: РНТОРЭС им. А.С. Попова, 2017. - С. 41-45).
Если одновременно функционируют несколько источников помех (сигналов) на одной частоте, то может быть применен способ (37 - Патент РФ №2556699, МПК: (2006.01) G01S 5/04. Способ пеленгации источников радиоизлучения на одной частоте. Патентообладатель - ФГУП «РНИИРС» Емельянов Р.В., Строцев А.А., Сухенький И.А. Опубл. - 20.07.2015 г.; 38 - Емельянов Р.В., Строцев А.А., Сухенький И.А. Методика определения интервальных стохастически зависимых оценок результатов пеленгации нескольких источников радиоизлучения, работающих на одной частоте // Успехи современной радиоэлектроники, 2013. - №8. - С. 25-31).
В зависимости от текущей оценки количества пространственно-разнесенных источников помех формируют L1 приемных каналов сигналов ССС и L2 приемных каналов сигналов ГНСС, при распределении антенных элементов по приемным блокам учитывают топологию антенных элементов, их расположение на носителе и пространственное положение носителя.
Для реализации пункта 2 выполняют действия в соответствии со способом-прототипом - принимают аддитивную смесь помех и сигналов от К навигационных космических аппаратов L2 приемными каналами, L2≥3, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны Р осям объекта, Р≥2.
Для реализации пункта 3 одновременно с приемом сигналов от навигационных космических аппаратов принимают аддитивную смесь помех и сигналов от Q космических аппаратов ССС L1 приемными каналами, где L1 определяется на первом этапе предлагаемого способа. При этом приемные каналы образуют цифровую антенную решетку, а для ее реализации используются подходы, описанные в [7], [16], [17], [18] и (39 - Ковалев К.Б., Кузин Д.А., Строцев А.А. Методика выбора варианта построения цифровой антенной решетки для приема сигналов низкоорбитальной системы спутниковой связи // V Всероссийская Микроволновая конференция. Доклады. - М.: ИРЭ им. В.А. Котельникова РАН. - 29 ноября-1 декабря 2017 г. - С. 72-76.), на основе пространственной селекции одновременно как полезных, так и помеховых сигналов.
Кроме того для повышения качества приема выполняется калибровка, например, в соответствии с алгоритмом калибровки многолучевых цифровых антенных решеток для приема сигналов низкоорбитальных систем спутниковой связи, выполняемой в процессе эксплуатации (40 - Кузин Д.А., Строцев А.А., Тимошенко А.С. Алгоритм калибровки многолучевых цифровых антенных решеток для приема сигналов низкоорбитальных систем спутниковой связи, выполняемой в процессе эксплуатации // Общие вопросы радиоэлектроники. - 2017. - Вып. 1(25). - С. 17-26.).
Для реализации пунктов 4-9 выполняют действия в соответствии со способом-прототипом - осуществляют дискретную временную задержку сигналов ГНСС, вычисляют весовые коэффициенты для каждой дискреты задержки, выполняют суммирование сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех, выделяют радионавигационные сигналы от K навигационных космических аппаратов, восстанавливают исходные параметры радионавигационных сигналов от K навигационных космических аппаратов с учетом соответствующей дискретной задержки, измеряют фазовые сдвиги между сигналами от каждого из K навигационных космических аппаратов между парами приемных каналов.
Для реализации пункта 10 - формирования RTK-оценки местоположения - учитывают количество источников помеховых сигналов в диапазоне частот ГНСС.
Если текущее количество источников помеховых сигналов в диапазоне частот ГНСС равно М2, то из числа L2 приемных каналов формируют группы каналов по М2+1 каналов, одну из групп определяют как базовую, остальные - как «роверы». Если сформировано  групп каналов, то топология положения условных центров групп каналов может быть задана в левой связанной системе координат (ЛССК) ОЛСХЛСYЛСZЛС:
групп каналов, то топология положения условных центров групп каналов может быть задана в левой связанной системе координат (ЛССК) ОЛСХЛСYЛСZЛС:  Т - знак транспонирования. При этом для расстояний между условных центров групп каналов ГНСС
Т - знак транспонирования. При этом для расстояний между условных центров групп каналов ГНСС

выполняется условие

где  - максимальный линейный размер объекта-носителя.
- максимальный линейный размер объекта-носителя.
Без ограничения общности можно считать, что группа каналов, образующих «базу» режима RTK, имеет индекс «0».
Тогда посредством помехозащищенного приема сигналов, реализованного на основе пространственной селекции М2 помех и полезных сигналов ГНСС, каждой группы каналов, обрабатываемых как оценки режима RTK, формируются RTK-оценки местоположения условных центров групп каналов (Вj, Lj, Hj),  в геоцентрической эллипсоидальной системе координат (ГЭСК).
в геоцентрической эллипсоидальной системе координат (ГЭСК).
Если текущее количество источников помеховых сигналов М2 в диапазоне частот ГНСС равно 0, то группы каналов не формируют, а для получения максимально точных оценок углового положения на основе RTK-оценок местоположение антенных элементов для этих каналов выбирают максимально разнесенными друг от друга. Такие оценки формируются наиболее оперативно по сравнению с применением методов помехоустойчивого приема на основе пространственной селекции помех.
Для реализации пункта 11 определяется угловое положение объекта-носителя.
Для этого сначала получают частные оценки. Первая частная оценка углового положения формируется в соответствии со способом-прототипом по фазовым сдвигам. Вторая частная оценка углового положения формируется по RTK-оценкам местоположения.
Поскольку в процессе оценки требуется определение угловых величин, то координаты Вj, Lj, Нj, приемников ГНСС, должны быть преобразованы в координаты геоцентрической пространственной прямоугольной экваториальной системы координат (ГППЭСК) по выражениям (41 - Машимов М.М. Геодезия. Теоретическая геодезия. Справочное пособие/ Под ред. В.П. Савиных и В.Р. Ященко. М.: Недра - 1991.):



где  а и
а и  - большая полуось и сжатие эллипсоида соответствующей системы координат.
- большая полуось и сжатие эллипсоида соответствующей системы координат.
Тогда оценка углового положения на основе решения геодезической задачи [41, с. 18, 19] по данным пространственно-разнесенных приемников ГНСС определяется по выражениям:



где F - оператор формирования оценки углового положения;
 ,
,  - оценки азимута и угла места вектора, образованного точками с координатами Х0, Y0, Z0 и Xj, Yj, Zj.
- оценки азимута и угла места вектора, образованного точками с координатами Х0, Y0, Z0 и Xj, Yj, Zj.
В качестве итоговой текущей оценки углового положения объекта-носителя может быть принята одна из частных или частные оценки могут быть объединены на основе комплексирования. Такое комплексирование может быть выполнено с использованием весового суммирования или на основе методики обработки сигналов ГНСС для определения углового положения разряженной антенной решетки навигационной аппаратуры потребителя (42 - Колесников С.С., Строцев А.А. Методика обработки сигналов ГНСС для определения углового положения разряженной антенной решетки навигационной аппаратуры потребителя // XI Всероссийская конференция «Радиолокация и радиосвязь». Сборник трудов. - М.: ИРЭ им. В.А. Котельникова РАН. - 27-29 ноября 2017 г. - С. 166-169), реализующей возможности совместного формирования оценки углового положения разряженной антенной решетки навигационной аппаратуры потребителя на основе решения геодезических задач и алгоритма корреляционного интерферометра.
Для реализации пункта 12, используя принятую L1 приемными каналами аддитивную смесь помех и сигналов от Q космических аппаратов ССС, на основе данных о пространственном, включая угловое, положении объекта-носителя формируют Q диаграмм направленности антенной системы. При этом каждая диаграмма направленности имеет максимум в направлении своего космического аппарата ССС с максимумом в направлении своего космического аппарата ССС и до L1-1 провалов в направлении источников помех, действующих в диапазоне частот ССС. Для реализации диаграмм направленности используются подходы, например, описанные в [7], [16], [17], [18] и [39].
Для реализации пункта 13 оценивают текущее качество приема сигналов ССС и, при необходимости, адаптивно перераспределяют антенные элементы по приемным блокам, а приемные каналы между приемом сигналов ГНСС и ССС.
Перераспределение может осуществляться на основе математической модели задачи принятия решений по реализации помехозащищенной навигационной аппаратуры потребителя глобальных навигационных спутниковых систем для различных условий ее разработки и применения (42 - Аверьянов А.В., Емельянов Р.В., Колесников С.С., Строцев А.А. Математическая модель задачи принятия решений по реализации помехозащищенной навигационной аппаратуры потребителя глобальных навигационных спутниковых систем для различных условий ее разработки и применения // Сборник трудов XXIII Международной научно-технической конференции «Радиолокация, навигация, связь». - Том 1. Воронеж: Издательство «Научно-исследовательские публикации». - 2017. - С. 153-159).
Таким образом, адаптивное распределение антенных элементов в предлагаемом способе позволяет с требуемой точностью и оперативностью сформировать пространственное положение носителя, тем самым обеспечить точное наведение луча диаграммы направленности на достаточно динамичный спутник низкоорбитальной системы спутниковой связи.
Предлагаемый способ имеет следующие отличительные признаки в последовательности его реализации от способа-прототипа, которые представлены в таблице 1.
Из представленной таблицы 1 сравнения последовательностей реализации способа-прототипа и предлагаемого способа видно, что в предлагаемом способе, относительно способа-прототипа, дополнительно до приема аддитивной смеси помех и сигналов от навигационных космических аппаратов на основе анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов ССС и ГНСС, а также текущих требований по качеству решения навигационных задач и приему сигналов ССС N пространственно-разнесенных антенных элементов распределяют по L приемным блокам, L≤N, из которых L1 приемных блоков назначают для приема сигналов ССС, a L2, приемных блоков назначают для приема сигналов ГНСС, тем самым формируют L1 приемных каналов сигналов ССС и L2 приемных каналов сигналов ГНСС, при распределении антенных элементов по приемным блокам учитывают топологию антенных элементов, их расположение на носителе и пространственное положение носителя, одновременно с приемом сигналов от навигационных космических аппаратов принимают аддитивную смесь помех и сигналов от Q космических аппаратов ССС L1 приемными каналами, до определения углового положения объекта-носителя, если текущее количество источников помеховых сигналов в диапазоне частот ГНСС равно М2, то из числа L2 приемных каналов формируют группы каналов по М2+1 каналов, одну из групп определяют как базовую, остальные - как «роверы», на основе помехозащищенного приема сигналов, реализованного на основе пространственной селекции М2 помех и полезных сигналов ГНСС, каждой группы каналов, обрабатываемых как оценки режима RTK, формируются RTK-оценки местоположения условных центров групп каналов, определение углового положения объекта-носителя выполняют на основе раздельных или совместных оценок по фазовым сдвигам или RTK-оценкам местоположения, после определения углового положения объекта-носителя для принятой аддитивной смеси помех и сигналов от Q космических аппаратов ССС L1 приемными каналами на основе данных о пространственном, включая угловое, положении объекта-носителя формируют Q диаграмм направленности антенной системы, каждая с максимумом в направлении своего космического аппарата ССС с максимумом в направлении своего космического аппарата ССС и до L1-1 провалов в направлении источников помех, действующих в диапазоне частот ССС, оценивают текущее качество приема сигналов ССС и при необходимости адаптивно перераспределяют антенные элементы по приемным блокам, а приемные каналы между приемом сигналов ГНСС и ССС.
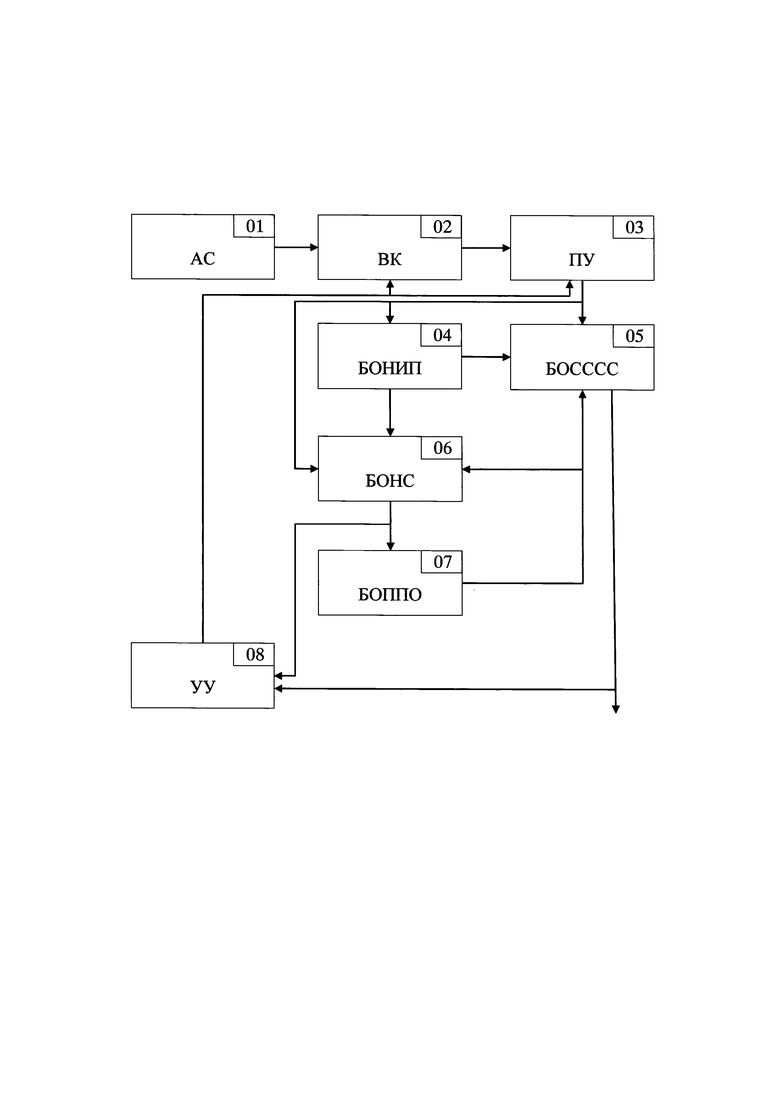
Структурная схема устройства, реализующего предлагаемый способ, изображена на фигуре. В состав устройства входят:
01 - антенная система (АС);
02 - высокочастотный коммутатор (ВК);
03 - приемное устройство с приемными блоками (ПУ);
04 - блок оценки направлений на источники помех (БОНИП);
05 - блок обработки сигналов систем спутниковой связи (БОСССС);
06 - блок обработки навигационных сигналов (БОНС);
07 - блок оценки пространственного положения объекта-носителя (БОППО);
08 - управляющее устройство (УУ).
Устройство содержит АС 01, выход которой соединен с информационным входом ВК 02, выход которого соединен с информационным входом ПУ 03. Выход ПУ 03 соединен со входом БОНИП 04 и с первыми входами БОСССС 05 и БОНС 06. Первый выход БОНИП 04 соединен со вторым входом БОСССС 05. Второй выход БОНИП 04 соединен со вторым входом БОНС 06. Выход БОНС 06 соединен со входом БОППО 07 и первым входом УУ 08. Выход БОППО 07 соединен с третьими входами БОСССС 05 и БОНС 06. Выход УУ 08 соединен с управляющими входами ВК 02 и ПУ 03. Выход БОСССС 05 соединен со вторым входом УУ 08 и является выходом устройства, на котором формируются результаты помехозащищенного приема сигналов ССС.
Устройство работает следующим образом: АС 01 представляет собой совокупность N пространственно-разнесенных антенных элементов с известным положением в связанной с объектом-носителем системе координат, которые преобразуют радиосигналы в диапазоне частот ССС и ГНСС в электрические сигналы, поступающие по высокочастотным линиям на информационный вход ВК 02. ВК 02, выполненный по стандартной схеме высокочастотного коммутатора «NxL», в соответствии с сигналами управления УУ 08 подключает заданные УУ 08 L из N пространственно-разнесенных антенных элементов к L приемным блокам ПУ 03. ПУ 03 представляет собой L-канальный цифровой приемник диапазона частот ССС и ГНСС с независимыми приемными блоками, которые преобразуют аналоговый сигнал с заданными УУ 08, через управляющий вход параметрами в цифровую форму. Преобразованные цифровые отсчеты сигналов ССС и ГНСС с выхода ПУ 03 поступают на соответствующие входы БОСССС 05 и БОНС 06. Одновременно с этим по сигналам УУ 08 цифровые отсчеты в частотном спектре сигналов ССС и ГНСС с выхода ПУ 03 поступают в БОНИП 04. В нем реализуется один из элементов анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов ССС и ГНСС - обнаружение сигналов источников помех и определение их углового положения в связанной с объектом-носителем системе координат. Данные о текущих угловом положении и параметрах источников помех, действующих в диапазоне частот ССС, поступают в БОСССС 05, а о текущих угловом положении и параметрах источников помех, действующих в диапазоне частот ГНСС, поступают в БОНС 06. В БОСССС 05 на основе данных о текущих угловом положении и параметрах источников помех, действующих в диапазоне частот ССС, текущем пространственном положении объекта-носителя, данные о котором поступают из БОППО 07, преобразуют цифровые отсчеты сигналов ССС, формируя максимум диаграммы направленности в текущее угловое положение источника сигнала ССС, а минимумы - в направлении текущих угловых положений источников помех. В БОНС 06 на основе данных о текущих угловом положении и параметрах источников помех, действующих в диапазоне частот ГНСС, текущем пространственном положении объекта-носителя, данные о котором поступают из БОППО 07, преобразуя цифровые отсчеты сигналов ГНСС, формируют помехоустойчивую оценку текущего местоположения объекта-носителя, а также помехоустойчивые оценки углового положения по фазовым сдвигам и на основе RTK-решения. По этим данным БОППО 07, получив их от БОНС 06, формирует итоговую текущую оценку углового положения объекта-носителя. Данные с результатами работы БОНС 06 и результатами приема сигналов ССС из БОСССС 05, являющимися выходными данными устройства, поступают в УУ 08 для оценки текущего качества приема сигналов ССС. На основе этой оценки УУ 08, при необходимости, формирует управляющие сигналы в ВК 02 и ПУ 03 адаптивно перераспределяя антенные элементы по приемным блокам, а приемные каналы между приемом сигналов ГНСС и ССС. При этом БОНИП 04, БОСССС 05, БОНС 06, БОППО 07 и УУ 08 могут быть реализованы на базе аппаратно-программных (вычислительных) устройств.
Таким образом, предлагаемый способ, относительно способа-прототипа, позволяет реализовать одновременный помехозащищенный адаптивный по количеству источников помех прием сигналов ССС и ГНСС на основе пространственной селекции помех и полезных сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| Пространственно-распределенная система радиоподавления НАП ГНСС с функцией альтернативного координатно-временного обеспечения для санкционированных потребителей | 2017 |
|
RU2649407C1 |
| СПОСОБ И УСТРОЙСТВО ПРОСТРАНСТВЕННО-ВРЕМЕННОЙ РЕЖЕКЦИИ ПОМЕХ В АППАРАТУРЕ ПОТРЕБИТЕЛЕЙ ГЛОБАЛЬНЫХ НАВИГАЦИОННЫХ СПУТНИКОВЫХ СИСТЕМ | 2023 |
|
RU2804922C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2618520C1 |
| НАВИГАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2015 |
|
RU2613153C1 |
| Способ и устройство создания преднамеренных помех спутниковой системе глобального позиционирования | 2024 |
|
RU2832277C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ ГЛОБАЛЬНЫМ НАВИГАЦИОННЫМ СПУТНИКОВЫМ СИСТЕМАМ | 2024 |
|
RU2828474C1 |
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
| Частотный компенсатор для обеспечения электромагнитной совместимости отечественного передатчика радиопомех НАП ГНСС противника с отечественной НАП ГНСС при их одновременной работе на совпадающих частотах | 2016 |
|
RU2608584C1 |
Изобретение относится к области систем спутниковой связи и может быть использовано для приема сигналов подвижных спутниковых служб систем спутниковой связи (ССС) в условиях действия преднамеренных или не преднамеренных помех в диапазоне частот как самой системы связи, так и глобальных навигационных спутниковых систем (ГНСС), в частности, для приема сигналов низкоорбитальных ССС абонентскими терминалами телекоммуникационных систем, расположенных на подвижных носителях. Техническим результатом является адаптивный по сигнально-помеховой обстановке одновременный помехозащищенный прием сигналов ССС и ГНСС на основе пространственной селекции помех, полезных сигналов и определение пространственной ориентации антенной системы с требуемой точностью и оперативностью, расположенной как на подвижном, так и неподвижном носителе. В способе помехозащищенного приема сигналов ССС прием сигналов ССС и ГНСС обеспечивают посредством многолучевой антенной системы. Определяют угловое положение объекта-носителя на основе раздельных или совместных оценок по фазовым сдвигам или RTK-оценкам местоположения по сигналам ГНСС, после чего на основе данных о пространственном, включая угловое, положении объекта-носителя формируют диаграммы направленности антенной системы, предназначенной для приема сигналов ССС каждая с максимумом в направлении своего космического аппарата ССС с максимумом в направлении своего космического аппарата ССС и провалов в направлении источников помех, действующих в диапазоне частот ССС, оценивают текущее качество приема сигналов ССС и, при необходимости, адаптивно перераспределяют антенные элементы антенной системы для приема сигналов ГНСС и ССС. 1 табл., 1 ил.
Способ помехозащищенного приема сигналов систем спутниковой связи, при котором принимают аддитивную смесь помех и сигналов от K навигационных космических аппаратов L2 приемными каналами, L2≥3, антенны которых расположены так, что линии, проведенные через фазовые центры антенн, параллельны Р осям объекта, Р≥2, осуществляют дискретную временную задержку сигналов глобальных навигационных спутниковых систем, вычисляют весовые коэффициенты для каждой дискреты задержки, выполняют суммирование сигналов каждого приемного канала с сигналами помех остальных каналов, являющихся для него компенсационными, предварительно умноженными на весовые коэффициенты, вычисленные на основе рекуррентной оценки обратной корреляционной матрицы помех, выделяют радионавигационные сигналы от K навигационных космических аппаратов, восстанавливают исходные параметры радионавигационных сигналов от K навигационных космических аппаратов с учетом соответствующей дискретной задержки, измеряют фазовые сдвиги между сигналами от каждого из K навигационных космических аппаратов между парами приемных каналов, определяют угловое положение объекта-носителя, отличающийся тем, что дополнительно до приема аддитивной смеси помех и сигналов от навигационных космических аппаратов на основе анализа текущей сигнально-помеховой обстановки в диапазоне рабочих частот сигналов систем спутниковой связи и глобальных навигационных спутниковых систем, а также текущих требований по качеству решения навигационных задач и приему сигналов систем спутниковой связи N пространственно-разнесенных антенных элементов распределяют по L приемным блокам, L≤N, из которых L1 приемных блоков назначают для приема сигналов систем спутниковой связи, a L2 приемных блоков назначают для приема сигналов глобальных навигационных спутниковых систем, тем самым формируют L1 приемных каналов сигналов систем спутниковой связи и L2 приемных каналов сигналов глобальных навигационных спутниковых систем, при распределении антенных элементов по приемным блокам учитывают топологию антенных элементов, их расположение на носителе и пространственное положение носителя, одновременно с приемом сигналов от навигационных космических аппаратов принимают аддитивную смесь помех и сигналов от Q космических аппаратов систем спутниковой связи L1 приемными каналами, до определения углового положения объекта-носителя, если текущее количество источников помеховых сигналов в диапазоне частот глобальных навигационных спутниковых систем равно М2, то из числа L2 приемных каналов формируют группы каналов по М2+1 каналов, одну из групп определяют как базовую, остальные - как «роверы», на основе помехозащищенного приема сигналов, реализованного на основе пространственной селекции М2 помех и полезных сигналов глобальных навигационных спутниковых систем, каждой группы каналов, обрабатываемых как оценки режима RTK, формируются RTK-оценки местоположения условных центров групп каналов, определение углового положения объекта-носителя выполняют на основе раздельных или совместных оценок по фазовым сдвигам или RTK-оценкам местоположения, после определения углового положения объекта-носителя для принятой аддитивной смеси помех и сигналов от Q космических аппаратов систем спутниковой связи L1 приемными каналами на основе данных о пространственном, включая угловое, положении объекта-носителя формируют Q диаграмм направленности антенной системы, каждая с максимумом в направлении своего космического аппарата систем спутниковой связи с максимумом в направлении своего космического аппарата системы спутниковой связи и до L1-1 провалов в направлении источников помех, действующих в диапазоне частот систем спутниковой связи, оценивают текущее качество приема сигналов систем спутниковой связи и, при необходимости, адаптивно перераспределяют антенные элементы по приемным блокам, а приемные каналы между приемом сигналов глобальных навигационных спутниковых систем и систем спутниковой связи.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2013 |
|
RU2535923C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА ПО РАДИОНАВИГАЦИОННЫМ СИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2618520C1 |
| Многолучевая антенная система с одним выходом | 2017 |
|
RU2649096C1 |
| ПРОЦЕДУРА ПОВЫШЕНИЯ ДОСТУПНОСТИ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2009 |
|
RU2495543C2 |
| US 6075483 A, 13.06.2000. | |||

