Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает приоритет по предварительной заявке США № 61/032852, поданной 28 февраля 2008 г. и озаглавленной «УСТАНОВЛЕНИЕ ПРЕДПОЛАГАЕМОГО ВРЕМЕНИ ДЛЯ GPS ПРИЕМНИКА», которая, таким образом, включена в данный документ посредством ссылки во всей своей полноте.
Уровень техники
Многие системы беспроводной связи используют расширенный прямой последовательностью спектр, чтобы передавать информацию. Коды, используемые для расширения сигнала, в основном являются псевдослучайными кодами. Приемник обычно восстанавливает лежащую в основе информацию путем корреляции расширяющего кода с локально сгенерированным кодом.
Иногда приемник может использовать смещение времени, связанное с кодами, чтобы установить временную привязку, которая может использоваться, чтобы выполнить определение местоположения. Определение местоположения, основанное на синхронизации, установленной исходя из псевдослучайных расширенных сигналов, выполняется в различных системах определения местоположения.
Навигационная система системы глобального позиционирования (GPS) является примером спутниковой системы позиционирования (SPS), которая использует спутники, которые находятся на орбите вокруг Земли. Любой пользователь GPS, где угодно на Земле, может получать точную навигационную информацию, включающую в себя 3-мерное местоположение, 3-мерную скорость и время. Система GPS включает в себя до 32 спутников, которые развертываются на круговых орбитах с радиусами 26-600 километров в шести плоскостях, расположенных под углом 55° относительно экватора и расположенных с интервалами в 120° относительно друг друга. Обычно от четырех до шести спутников равномерно расположены в пределах каждой из шести плоскостей орбиты. Определения местоположения, с использованием GPS, основаны на измерениях времен задержки распространения сигналов GPS, широковещательно переданных с орбитальных спутников на GPS приемник. Как правило, прием сигналов от 4 спутников требуется для точного определения местоположения в 4 измерениях (широта, долгота, высота, и время). Как только приемник измерил соответствующие задержки распространения сигнала, дальность до каждого спутника вычисляется путем умножения каждой задержки на скорость света. Затем, местонахождение и время находятся посредством решения системы из четырех уравнений с четырьмя неизвестными, охватывающими измеренные дальности и известные местоположения спутников. Определенные способности GPS системы поддерживаются посредством бортовых атомных часов для каждого спутника и наземными станциями слежения, которые непрерывно выполняют мониторинг и корректируют спутниковые часы и параметры орбиты.
Каждый GPS спутник передает, по меньшей мере, два кодированных прямой последовательностью сигнала с расширенным спектром в диапазоне L: сигнал L1 на несущей частоте 1,57542 ГГц и сигнал L2 на 1,2276 ГГц. Сигнал L1 состоит из двух фазоманипулированных (PSK) сигналов с расширенным спектром, модулированных со сдвигом фаз на девяносто градусов: сигнал P-кода (P-точный) и сигнал C/A-кода (C/A-грубого обнаружения). Сигнал L2 содержит только сигнал P-кода. Коды P и C/A являются повторными псевдослучайными последовательностями битов (также называемые «элементарными посылками»), которыми модулируются несущие. Подобный таковому сигналу характер этих кодов используется приемником при выполнении измерений задержки времени. Эти коды для каждого спутника являются уникальными, позволяя приемнику различать, какой спутник передал данный код, несмотря на то, что они все на одной и той же несущей частоте. Также модулированным на каждой несущей является поток данных в 50 бит/секунду, который содержит информацию о системном статусе и параметрах орбиты спутника, которые необходимы для навигационных вычислений. Сигналы P-кода зашифрованы и, в общем случае, не являются доступными для коммерческих и частных пользователей. C/A сигнал является доступным для всех пользователей.
Операции, выполняемые в GPS приемнике, по большей части типичны для операций, выполняемых в любом приемнике расширенного прямой последовательностью спектра. Расширяющий эффект модуляции псевдослучайных кодов должен быть удален из каждого сигнала путем умножения его на выровненную по времени, локально сгенерированную копию кода, в процессе, известном как сжатие. Так как соответствующее выравнивание времени, или задержка кода, вряд ли будет известна при запуске приемника, оно должно быть определено путем поиска в течение начальной фазы «вхождение в синхронизм» работы GPS приемника. После того, как определено, надлежащее временное выравнивание кода поддерживается в течение фазы «отслеживание» работы GPS приемника.
После того, как принятый сигнал подвергся сжатию, каждый сигнал состоит из PSK сигнала в 50 бит/секунду на промежуточной несущей частоте. Точная частота этого сигнала является неопределенной из-за эффекта Доплера, вызванного относительным перемещением между спутником и оконечным устройством, и локальной ошибки генератора опорных импульсов GPS приемника. В течение начального установления синхронизации с сигналом должен также осуществляться поиск этой доплеровской частоты, так как она обычно неизвестна до вхождения в синхронизм. Как только доплеровская частота приблизительно определена, демодуляция несущей продолжается.
После демодуляции несущей выбор времени на передачу бита данных выводится контуром битовой синхронизации, и поток данных, наконец, обнаруживается. Навигационное вычисление может быть осуществлено, как только сигналы от четырех спутников обнаружены и с ними выполнена синхронизация, необходимая временная задержка и доплеровские измерения сделаны, и достаточное число битов данных (достаточное, чтобы определить GPS привязку по времени и параметры орбиты) было принято.
Одним недостатком GPS системы для определения местоположения и, в общем, большинства SPS систем, является длительное время, необходимое для начальной фазы установления синхронизации с сигналом. Как упомянуто выше, прежде чем четыре спутниковых сигнала могут быть отслежены, они должны быть найдены в двумерном «пространстве» поиска, измерения которого представляют собой задержку фазы кода и смещение доплеровской частоты. Как правило, если нет никаких предварительных сведений о местоположении сигнала в этом поисковом пространстве, как имело бы место после «холодного запуска» приемника, большое число задержек кода (приблизительно 2000) и доплеровских частот (возможно, 15 или больше) должно быть найдено для каждого спутника, который должен обнаруживаться и отслеживаться. Таким образом, для каждого сигнала должны быть исследованы вплоть до 30000 или более местоположений в пространстве поиска. Обычно эти местоположения исследуются по одному последовательно, что представляет собой процесс, который может занять несколько минут. Время обнаружения дополнительно увеличивается, если идентификаторы (т.е. PN-коды) четырех спутников в пределах обзора приемной антенны неизвестны.
В случае, когда SPS приемник уже получил спутниковые сигналы и затем находится в режиме отслеживания, процесс определения местоположения, в общем, может быть выполнен во временном кадре, который является намного меньшим, чем временной кадр, требуемый для обнаружения. Однако при обычном использовании терминалов беспроводной связи, пользователи включают питание и быстро начинают работу. Это может иметь место, когда подразумевается осуществление связи при чрезвычайных ситуациях. В таких ситуациях задержка времени, связанная с обнаружением сигнала SPS спутника в течение нескольких минут, обусловленного холодным запуском SPS/беспроводного оконечного устройства, прежде чем определение местонахождения может быть получено, ограничивает время отклика системы.
Таким образом, сохраняется потребность в системе и способе для повышения способности определять время, связанное с сигналами SPS спутников, и представлять определение местоположения в SPS/беспроводном оконечном устройстве.
Раскрытие изобретения
Способы и устройства для улучшения SPS выполнения определения местоположения. Способы и устройства, описанные здесь, могут использоваться, чтобы улучшить время установления местоположения, определенного SPS, и обеспечить способность определять установление местоположения в слабых, затененных или других трудных зонах покрытия. SPS приемник способен выполнять определение местоположения в ситуациях, когда от двух до четырех или более спутниковых сигналов могут быть приняты, но только один момент времени спутника может быть успешно демодулирован. Приемник может использовать успешно декодированную привязку по времени, чтобы определить время, связанное с переходами края (фронта) бита для сигналов от этого спутника. Приемник использует переход края бита от спутника с известным временем, чтобы установить время, по меньшей мере, для одного перехода края бита для сигналов от других спутников, для которых время не демодулируется. Приемник устанавливает время до переходов края бита, возникающих в пределах предопределенного окна, включающего в себя переход края бита с известным временем. Местоположение может быть определено на основании времени. Недемодулированные спутниковые времена и размещение окна могут быть изменены после ошибочных гипотез решений местоположения.
Аспекты изобретения включают в себя способ определения местоположения в устройстве беспроводной связи. Способ включает в себя прием сигнала, расширенного псевдошумовым кодом, от каждого из, по меньшей мере, двух искусственных спутников, определение времени края перехода бита для каждого сигнала, расширенного псевдошумовым кодом, определение привязки по времени для, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом, и определение решения по определению местоположения для устройства беспроводной связи на основании привязки по времени и времени края перехода бита для сигнала, расширенного псевдошумовым кодом, от каждого из по меньшей мере двух искусственных спутников.
Аспекты изобретения включают в себя способ определения местоположения в устройстве беспроводной связи. Способ включает в себя прием сигнала, расширенного псевдошумовым кодом, от каждого из по меньшей мере двух искусственных спутников спутниковой системы позиционирования (SPS), определение времени края перехода бита для каждого сигнала, расширенного псевдошумовым кодом, определение привязки по времени для первого сигнала, расширенного псевдошумовым кодом, определение времени, связанного с первым переходом бита для первого сигнала, расширенного псевдошумовым кодом, конфигурирование временного окна, которое захватывает первый переход бита для первого сигнала, расширенного псевдошумовым кодом, и по меньшей мере один переход бита из второго сигнала, расширенного псевдошумовым кодом, для которого привязка по времени неизвестна, генерирование гипотезы времени для, по меньшей мере, одного битового перехода из второго сигнала, расширенного псевдошумовым кодом, определение решения по определению местоположения для устройства беспроводной связи на основании времени, связанного с первым переходом бита, и гипотезы времени для по меньшей мере одного битового перехода из второго сигнала, расширенного псевдошумовым кодом, и подтверждение правильности решения по определению местоположения.
Аспекты изобретения включают в себя способ определения местоположения в устройстве беспроводной связи. Способ включает в себя определение времени переходов края бита для каждого из множества SPS сигналов, определение привязки по времени для, по меньшей мере, одного перехода края бита, генерирование гипотезы времени для множества из переходов края бита на основании гипотезы времени и привязки по времени и определение решения определения местоположения на основании гипотезы времени.
Аспекты изобретения включают в себя устройство определения местоположения в пределах устройства беспроводной связи. Устройство включает в себя приемник, выполненный с возможностью приема множества сигналов, расширенных псевдошумовым кодом, от множества искусственных спутников SPS, контроллер, выполненный с возможностью определения времени переходов края бита из каждого из множества сигналов, расширенных псевдошумовым кодом, декодер сообщения хронирования, выполненный с возможностью определения привязки по времени для, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом, селектор гипотез, выполненный с возможностью определения времени края бита от каждого из множества сигналов, расширенных псевдошумовым кодом, и модуль решения местоположения, выполненный с возможностью находить решение определения местоположения на основании привязки по времени и гипотезы времени для края бита от каждого из множества сигналов, расширенных псевдошумовым кодом.
Краткое описание чертежей
Признаки, задачи и преимущества вариантов осуществления раскрытия станут более очевидными из подробного описания, изложенного ниже, при совместном рассмотрении с чертежами, на которых подобные элементы имеют одинаковые ссылочные позиции.
Фиг.1 представляет собой упрощенную диаграмму системы варианта осуществления системы определения местоположения.
Фиг.2 представляет собой упрощенную диаграмму функциональных блоков варианта осуществления приемника определения местоположения.
Фиг.3 представляет собой упрощенную диаграмму функциональных блоков варианта осуществления модуля проверки действительности.
Фиг.4 представляет собой упрощенную блок-схему последовательности операций варианта осуществления способа определения местоположения при помощи установления гипотетического времени.
Фиг.5 представляет собой упрощенную блок-схему последовательности операций варианта осуществления способа проверки действительности решения местоположения.
Фиг.6 представляет собой упрощенную временную диаграмму примера решения местоположения при помощи установления гипотетического времени.
Фиг.7 представляет собой упрощенную временную диаграмму примера решения о местоположении при помощи установления гипотетического времени.
Осуществление изобретения
В данной заявке описываются способ и устройства для определения решения местоположения спутниковой системы позиционирования (SPS) на основании получения только одной привязки по времени для сигнала, расширенного псевдошумовым кодом, для искусственного спутника. SPS приемник может принимать два или более сигналов, расширенных псевдошумовым кодом, от искусственных спутников и может коррелировать сигналы с локально сгенерированными последовательностями псевдошумового кода, чтобы определить идентификаторы искусственных спутников и определить относительное хронирование перехода края бита для каждого из сигналов. Приемник может демодулировать только один из спутниковых сигналов для определения привязки по времени, из которой может быть определено ассоциированное хронирование переходов края бита.
Хотя GPS система используется здесь с целью пояснения, будет понятно, что SPS может включать в себя другие спутниковые системы позиционирования, такие как система GLONASS, применяемая Россией, система Galileo, разрабатываемая Европейским союзом, и проекты глобальной спутниковой навигации, такие как система COMPASS, запланированная для будущего развертывания Китаем.
Дополнительно, SPS может включать в себя зональную навигационную спутниковую систему, которая обслуживает конкретную географическую зону («зона покрытия»), определяемую орбитами ее конкретных спутников. Например, RNSS может включать в себя широкозонную усиливающую систему (WAAS), покрывающую Соединенные Штаты, Европейскую геостационарную дополнительную навигационную систему (EGNOS), покрывающую Европу и окружающие зоны, MTSAT спутниковую усиливающую систему (MSAS), обслуживающую Японию, и квазизенитную спутниковую систему (QZSS). Понятно, что RNSS может также включать в себя другие зональные спутниковые системы, такие как системы GPS при содействии геоусиленой навигации (GAGAN) и индийской зональной навигационной спутниковой системы (IRNSS), разрабатываемые Индией, и другие подобные системы. Когда способы и устройства, описанные здесь, основываются или иначе используют сигналы SPS искусственных спутников, сигналы SPS искусственных спутников могут исходить от единственной SPS или комбинации SV из множества SPS.
Приемник, имея сведения о хронировании переходов края бита для одного спутника и относительного хронирования переходов края бита для других спутников, может сконфигурировать временное окно, имеющее предопределенную продолжительность, и расположить временное окно, чтобы вмещать, по меньшей мере, один переход края бита, имеющего известное хронирование. Приемник может исследовать гипотезу, в которой время переходов края бита во временном окне устанавливаются на основе перехода края бита, имеющего известное хронирование.
Приемник может выполнить попытку установления местоположения с помощью установления времени гипотезы и подтверждения правильности решения для местоположения. Решение может быть подтверждено путем проверки решения местоположения и параметров, связанных с решением для местоположения, по отношению к одному или более предопределенных ограничений. Решение по местоположению, которое удовлетворяет всем ограничениям, считают действительным решением по местоположению.
Решение о местоположении, которое не в состоянии удовлетворить некоторое предопределенное количество ограничений, можно считать недействительным решением о местоположении. Приемник может повторно расположить временное окно и может обновить гипотезу хронирования в ответ на недействительное решение о местоположении. Решение о местоположении снова предпринимается и проверяется на действительность. Приемник может повторять процесс повторного расположения временного окна, обновления гипотезы хронирования и выполнения попытки решения о местоположении до тех пор, пока действительное решение о местоположении не будет получено, или все отдельные конфигурации временного окна и гипотезы хронирования не будут проверены.
Возможность демодулировать больше чем одну привязку по времени из ассоциированных спутниковых сигналов сокращает количество отдельных конфигураций временного окна и таким образом понижает общее количество гипотез хронирования, которые необходимо протестировать перед определением действительного решения или исчерпыванием всех возможностей.
В общем случае приемник запрашивает сигналы, по меньшей мере, от четырех отдельных SPS искусственных спутников, когда приемник сконфигурирован с возможностью определения трехмерного установления местоположения исключительно на основании сигналов от SPS искусственных спутников. Приемник может быть в состоянии определить установление местоположения при помощи сигналов меньше чем от четырех отдельных SPS искусственных спутников при условиях, которые более ограничены, чем общий случай.
Приемник может определить установление местоположения при помощи сигналов только от трех отдельных SPS искусственных спутников с дополнительными сведениями, относящимися к местоположению или системному хронированию. Например, если приемник имеет сведения о высоте, предполагает высоту или иным образом должен только определить двумерное установление местоположения, приемнику могут потребоваться лишь сигналы от трех отдельных SPS искусственных спутников. Дополнительно, приемник может определять местоположение, с использованием сигналов только от трех отдельных SPS искусственных спутников, когда приемник не имеет сведений о начальном местоположении, но имеет сведения о времени SPS системы. Приемник может иметь сведения о времени SPS системы, например, через предшествующую разрешающую способность по времени, определенную в предшествующих установлениях местоположения, используя локальный тактовый сигнал, который синхронизирован с системным временем, путем приема информации о системном времени от внешнего источника и т.п., или некоторой комбинацией этого.
Приемник может быть в состоянии определить установление местоположения при помощи сигналов только от двух отдельных искусственных спутников, когда приемник имеет сведения или иначе предполагает высоту в комбинации со сведениями о псевдодальностях и доплеровском сдвиге для этих двух искусственных спутников для вычисления местоположения.
В большинстве случаев приемнику требуется получать достаточную информацию, чтобы найти неизвестные (x, y, и z в декартовой системе координат) трехмерного местоположения, и системное время. Приемник может сократить количество сигналов отдельных SPS искусственных спутников, требуемых для определения решения о местоположении, когда одно или более из трехмерного местоположения или системного времени являются известными или иным образом могут быть независимо определены.
Приемник должен только определить или иначе вывести хронирование переходов края бита для одного искусственного спутника в каждой из вышеупомянутых ситуаций, чтобы определить действительное установление трехмерного местоположения. Хронирование переходов края бита для сигналов от одного или более дополнительных спутников может быть определено на основании тестирования гипотезы совместно с любой дополнительной релевантной информацией о местоположении или параметром, таким как высота, псевдодальность и доплеровский сдвиг, или некоторый другой параметр.
Функциональность SPS приемника улучшается из-за возможности определить действительное установление местоположения, в случае наличия только одного сигнала искусственного спутника с достаточным качеством сигнала для демодулирования привязки по времени. Остающиеся спутниковые сигналы, необходимые для определения местоположения, могут быть относительно слабыми сигналами, когда необходима лишь возможность определения переходов края бита. Возможность определить успешное решение о местоположении остается действительной независимо от какой-либо неопределенности начального местоположения. Таким образом, способы и устройство могут быть реализованы в устройствах глобального роуминга, когда неопределенность начального местоположения может быть большой или иначе неизвестной, но когда эфемеридные данные спутника могут быть легко приняты или определены. Время до начального установления, производительность и точность SPS приемника улучшается из-за возможности использовать сигналы от слабых искусственных спутников. Возможность определять удачное решение о местоположении может быть особенно полезной в ситуациях, когда вспомогательные данные или начальные предположения являются неточными, такие как информация, принятая в ориентированной на страну таблице поддержки.
Более того, простота получения решения о местоположении позволяет раскрытым способам и устройству использоваться как верификация определения местоположения, выполненного другими техниками определения местонахождения. Способы и устройство могут быть реализованы в автономном SPS приемнике, таком как персональное навигационное устройство, и не требуют получения данных поддержки.
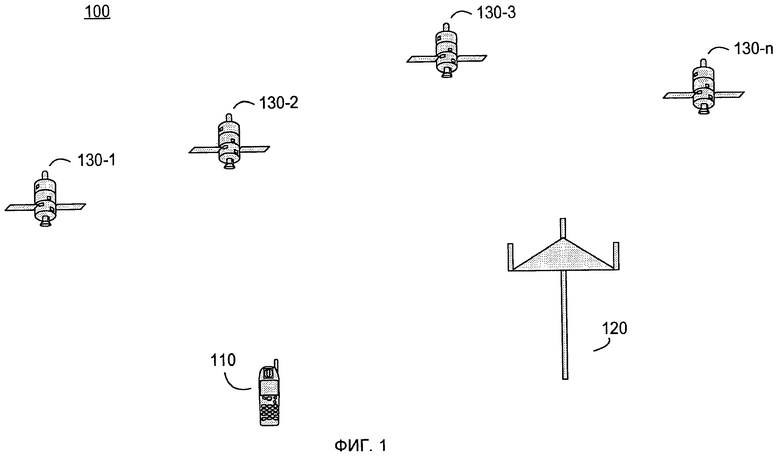
Фиг.1 представляет собой упрощенную системную схему варианта воплощения системы 100 определения местоположения. Система 100 определения местоположения включает в себя множество спутников 130. Система 100 определения местоположения может также включать в себя один или более наземных радиомаяков 120, псевдоспутники или другие передатчики сигналов. В варианте воплощения по фиг.1 наземный радиомаяк 120 изображен в качестве базовой станции, такой как базовая станция системы беспроводной связи. Базовая станция может обеспечить, например, сигналы хронирования, которые могут использоваться в гибридной системе определения местоположения, такой как гибридная GPS. Альтернативно или дополнительно, базовая станция может быть источником определения начального местоположения для снижения неопределенности местоположения и может быть сконфигурирована с возможностью обеспечения данных поддержки, таких как GPS данные поддержки. Данные поддержки могут включать в себя, но не ограничены этим, идентификаторы спутников выше горизонта, предлагаемые начальные точки поиска и/или диапазоны фазы кода, GPS данные каталога, эфемеридные данные спутника и т.п. или некоторую комбинацию этого.
Устройство 110 беспроводной связи может определять свое местоположение, если оно получает два отдельных сигнала хронирования. Хотя обсуждение сосредотачивается на определении нахождения местоположения исключительно на основании сигналов искусственного спутника, некоторые системы определения местоположения или разновидности систем определения местоположения, такие как гибридная GPS, могут использовать сигналы от наземного радиомаяка 120 как часть определения местоположения.
Устройство 110 беспроводной связи может принять сигналы, расширенные псевдослучайным кодом, от каждого, по меньшей мере, из двух искусственных спутников, например, 130-1 и 130-n, которые являются частью совокупности спутников, такой как совокупность GPS спутников. Число отдельных спутниковых сигналов, затребованных устройством 110 беспроводной связи для установления действительного местоположения, основывается на количестве дополнительной релевантной информации о местоположении, доступной устройству 110 беспроводной связи. Как отмечено выше, когда устройство 110 беспроводной связи определяет установление трехмерного местоположения, основываясь исключительно на сигналах от искусственных спутников, устройство 110 беспроводной связи запрашивает сигналы, по меньшей мере, от четырех отдельных искусственных спутников, 130-1, 130-2, 130-3, и 130-n. Устройство 110 беспроводной связи может запросить сигналы только от двух отличных искусственных спутников, например 130-1 и 130-n, когда устройство 110 беспроводной связи имеет сведения или иначе может определить дополнительную релевантную информацию о местоположении.
Устройство 110 беспроводной связи может коррелировать принятые сигналы по отношению к локально сгенерированным версиям последовательностей псевдошумового кода, которые могут быть сдвинуты по частоте, чтобы учесть доплеровские сдвиги. Устройство 110 беспроводной связи может идентифицировать спутники на основании результатов корреляции.
Устройство 110 беспроводной связи может также определять относительные переходы края бита для каждого из спутниковых сигналов. Переходы края бита происходят при переходах базового информационного сигнала, модулирующего спутниковые сигналы. Базовая информация может включать в себя, например, навигационное сообщение, данные каталога, эфемеридные данные спутника и информацию о временной отметке или привязке по времени. В общем случае устройство беспроводной связи может точно определять переходы края бита и может повышать чувствительность определения перехода края бита путем увеличения времени интегрирования принятого сигнала. В сигнале GPS спутника так же, как сигнале спутника GLONASS, базовые данные следуют с частотой в 50 Гц, таким образом переходы края бита могут происходить каждые 20 миллисекунд. В предложенной спутниковой системе Galileo битовые продолжительности возникают с интервалами в 4 миллисекунды.
Устройство 110 беспроводной связи может предпринять попытку демодулировать базовое сообщение и декодировать временное сообщение от каждого из спутников 130. Временное сообщение в GPS сигналах, расширенных псевдослучайным кодом, повторяются каждые шесть секунд. Таким образом, возможность декодировать временное сообщение возникает только однажды в каждом шестисекундном интервале. Однако устройство 110 беспроводной связи может быть не в состоянии успешно декодировать информацию о временном сообщении от всех спутников 130, например, ввиду слабых спутниковых сигналов. Устройство 110 беспроводной связи может выполнить точное определение местоположения, если оно в состоянии декодировать, по меньшей мере, одно временное сообщение в дополнение к идентификации относительного хронирования перехода края бита, по меньшей мере, для одного другого искусственного спутника.
Предположим, что устройство 110 беспроводной связи в состоянии успешно декодировать временное сообщение из сигналов от первого искусственного спутника 130-1. Устройство 110 беспроводной связи может использовать временное сообщение в качестве привязки по времени, с которой может быть связано время переходов края бита для этого искусственного спутника. Таким образом, устройство 110 беспроводной связи имеет сведения о хронировании перехода края бита на основании возможности декодировать сообщение хронирования.
Поскольку устройство 110 беспроводной связи также знает относительное хронирование перехода края бита для каждого из искусственных спутников, для которых временное сообщение еще должно быть декодировано, устройство 110 беспроводной связи может определить время каждого перехода края бита по отношению к известным переходам края бита для первого искусственного спутника 130-1.
Хронирование сигналов от каждого из искусственных спутников от 130-1 до 130-n синхронизируется с той же самой временной осью GPS. Однако сигналы, достигающие устройства 110 беспроводной связи, могут изменяться с течением времени из-за различных задержек распространения, испытываемых различными спутниковыми сигналами. Поэтому, хотя устройство 110 беспроводной связи знает время о переходах края бита для первого спутника 130-1 исходя из декодирования сообщения хронирования, устройство беспроводной связи не знает, опережают или запаздывают ли сигналы от каждого из других искусственных спутников сигнала от первого искусственного спутника 130-1. Таким образом, устройство беспроводной связи неспособно немедленно вывести время каждого перехода края бита для второго до n-го спутников 130-2 до 130-n. Устройство 110 беспроводной связи лишь в состоянии немедленно определить время каждого перехода бита с ошибкой, кратной 20 миллисекундам.
Устройство 110 беспроводной связи может разрешить неоднозначность в переходах края бита путем оконной обработки переходов края бита и тестирования гипотезы. Устройство 110 беспроводной связи может наложить окно на переходы края бита продолжительностью меньшей, чем ожидаемое изменение времени.
Эмпирические исследования и моделирование показали, что задержка распространения от искусственного спутника GPS до фактически любой точки на земле, где этот спутник видим, изменяется от абсолютного минимума приблизительно 65 миллисекунд к абсолютному максимуму приблизительно 88 миллисекунд, при условии, что спутники выше горизонта нулевого градуса. Маловероятно, что одно и то же местоположение одновременно будет испытывать как минимальные, так и максимальные спутниковые задержки распространения. Однако окно может быть установлено на основании разностей в максимальной задержке распространения и минимальной задержке распространения. Таким образом, размер окна может быть меньше, чем приблизительно 22 миллисекунды, меньше чем приблизительно 23 миллисекунды, или некоторым другим значением. Использование недостаточной продолжительности окна может привести к неспособности определять гипотезу времени, которая приводит к определению действительного местоположения. Тем не менее расширение времени окна чрезмерно создает многочисленные гипотезы времени для проверки, что не приведет к разумному определению действительного местоположения. Размер окна приблизительно в 20, 21 или 22 миллисекунды удобен не только потому, что оно охватывает по существу весь диапазон задержек распространения, но потому что продолжительность имеет величину порядка единственного битового периода в 20 миллисекунд. Таким образом, повторная установка размера окна приблизительно в 20, 21 или 22 миллисекунды по всем возможным вариантам приводит не менее чем к трем различным переходам края бита от единственного искусственного спутника, которые необходимо учитывать при тестировании гипотез времени.
Устройство 110 беспроводной связи позиционирует окно по переходам края бита для каждого из принятых спутниковых сигналов и позиционирует окно, чтобы вмещать, по меньшей мере, один известный переход края бита от первого спутника 130-1. Устройство 110 беспроводной связи может затем определить набор из гипотезы времени на основании местонахождения окна, время известного перехода края бита и местоположения переходов края бита для других спутников относительно известного перехода края бита.
В одном варианте осуществления устройство 110 беспроводной связи строит гипотезу о хронировании каждого неизвестного хронирования перехода края бита, происходящего наиболее близко к известному времени края бита, с временем известного времени края бита. Устройство 110 беспроводной связи определяет решение о местоположении для гипотезы времени. Устройство 110 беспроводной связи может осуществить, например, фактически любой тип решения о местоположении на основании измерения псевдодальности. Устройство 110 беспроводной связи может иметь сведения о местоположениях спутников на основании, например, достоверных эфемеридных данных для спутников или на основании алгоритма предсказания орбиты спутника.
Устройство 110 беспроводной связи может осуществить, например, технику повторяющегося решения о местоположении, такую как метод взвешенных наименьших квадратов, метод минимальных наименьших квадратов, взвешенная регрессия, калмановскую фильтрацию и т.п. или некоторую комбинацию указанного. Устройство 110 беспроводной связи может подтвердить правильность решения о местоположении. Если решение о местоположении успешно подтверждается, то оно представляет собой решение о местоположении для устройства 110 беспроводной связи. Однако, если решение о местоположении не действительно, устройство 110 беспроводной связи выполняет сдвиг или иначе обновляет позицию окна и обновляет гипотезу времени. Устройство 110 беспроводной связи повторяет решение о местоположении и процесс подтверждения действительности, сопровождаемые процессом повторного размещения окна, пока все отдельные размещения окна и гипотезы времени не будут протестированы или пока не определено действительное решение о местоположении.
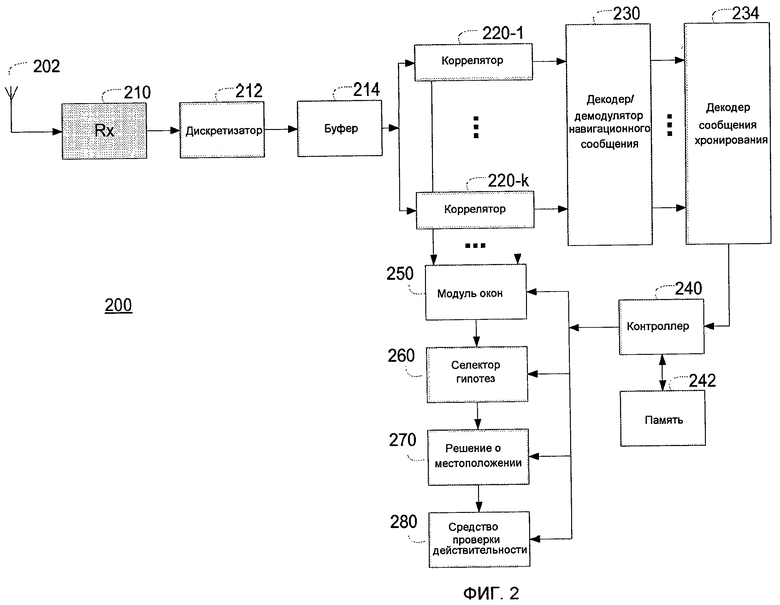
Фиг.2 представляет собой упрощенную диаграмму функциональных блоков варианта осуществления приемника 200 определения местоположения. Приемник 200 определения местоположения может быть осуществлен, например, в устройстве беспроводной связи по фиг.1, чтобы выполнять определение местоположения.
Приемник 200 включает в себя антенну 202, соединенную с приемным входным каскадом 210. Вывод приемного входного каскада соединяется с дискретизатором 212. Вывод дискретизатора 212 присоединяется к буферу 214.
Приемный входной каскад 210 сконфигурирован с возможностью подстройки к номинальной частоте приема сигналов GPS спутников, чтобы принять составной сигнал, который может включать в себя множество сигналов, расширенных псевдослучайным кодом, соответствующих множеству искусственных спутников. Приемный входной каскад 210 выполняет фильтрацию, усиливает и преобразует по частоте составной принятый сигнал. Дискретизатор 212 может быть сконфигурирован с возможностью дискретизировать выход приемного входного каскада и преобразовывать аналоговый сигнал, выведенный из приемного входного каскада в цифровое представление. Дискретизатор 212 может быть сконфигурирован с возможностью дискретизировать принятые сигналы с частотой, которая выше, чем частота элементарной посылки, связанная с псевдошумовым кодом. Например, дискретизатор 212 может быть сконфигурирован с возможностью выполнения дискретизации с частотой элементарной посылки, удвоенной частотой элементарной посылки, четырхкратной частотой элементарной посылки, или некоторым другим кратным или некратным частоты элементарной посылки. Дискретизатор 212 может быть сконфигурирован с возможностью запоминания отсчетов в буфере 214.
К содержимому буфера 214 может быть осуществлен доступ множеством корреляторов 220-1 до 220-k, которые могут быть сконфигурированы по существу параллельно, чтобы ускорить получение сигналов. Каждый коррелятор 220 может быть сконфигурирован с возможностью осуществления поиска отдельного пространства шумоподобного кода. Альтернативно, множество корреляторов 220 могут быть сконфигурированы с возможностью осуществления поиска одинакового пространства шумоподобного кода, но могут оперировать с отличными отсчетами из буфера 214. В некоторых вариантах осуществления различные подмножества корреляторов 220 конфигурируются для отличных пространственных поисков псевдошумового кода по различным группам отсчетов из буфера 214. Каждый коррелятор 220 может определить смещение фазы кода для конкретной фазы кода и может также определить переход края бита для конкретного спутникового сигнала, связанного с псевдошумовым кодом, для которого конфигурируется коррелятор 220.
Вывод от корреляторов 220 соединяется с демодулятором/декодером 230 навигационного сообщения, который может быть сконфигурирован с возможностью декодирования навигационного сообщения от каждого из искусственных спутников, для которых обнаруживается сигнал. Декодер 230 навигационного сообщения может быть соединен с декодером 234 сообщения хронирования, который может исследовать успешно демодулированные и декодированные навигационные сообщения и выполнять попытку декодирования сообщения хронирования от них.
Декодер 234 сообщения хронирования может быть соединен с контроллером 240. Декодер 234 сообщения хронирования может информировать или иначе передавать информацию о сообщении хронирования и связанную информацию об искусственном спутнике к контроллеру 240. На основании информация о сообщении хронирования контроллер 240 может назначить или иначе определить время переходов края бита от искусственного спутника, соответствующее сообщению хронирования. Время перехода края бита может представлять задержку распространения от искусственных спутников до приемника 200. Контроллер 240 не имеет необходимости, на данном этапе, в разрешении какой-либо неоднозначности в абсолютном времени хронирования перехода края бита, но вместо этого может выбрать хронирование перехода края бита таким образом, чтобы полная задержка распространения, измеренная в приемнике 200, находилась около центра ожидаемого диапазона задержки распространения. Фактическое хронирование перехода края бита может быть разрешено, когда определяется решение о местоположении.
Контроллер 240 может взаимодействовать с компьютерно-читаемым носителем, таким как память 242. Память может запоминать одну или более компьютерно-читаемых инструкций, которые предписывают контроллеру выполнять по существу некоторые или все способы, описанные здесь. В некоторых осуществлениях контроллер 240, совместно с инструкциями в памяти 242, может быть сконфигурирован с возможностью выполнения некоторых или всех функций модуля 250 окон, селектор 260 гипотез, модуль 270 решения местоположения, и средство 280 проверки действительности.
Модуль 250 окон присоединяется к каждому коррелятору 220 и принимает информацию о переходе края бита от корреляторов 220. Модуль 250 окон может быть сконфигурирован с возможностью фильтрования или иначе выбора только тех переходов края бита, которые происходят в пределах продолжительности окна.
Контроллер 240 может быть сконфигурирован с возможностью исходного позиционирования окна на основании местоположения известного по времени перехода края бита. Контроллер 240 или модуль 250 окон может повторно позиционировать окно после определения недействительных гипотез хронирования.
Селектор 260 гипотез сконфигурирован с возможностью приема переходов края бита, указателей на переходы края бита, или идентичности переходов края бита, от модуля 250 окон. Селектор 260 гипотез может быть сконфигурирован с возможностью установления хронирования для каждого из краев бита в пределах окна на основании времени известного перехода края бита. В одном варианте осуществления селектор 260 гипотез устанавливает каждый переход края бита в пределах окна на основании времени известного перехода края бита. Если больше чем один переход края бита для одного и того же искусственного спутника находится в пределах окна, селектор 260 гипотез может использовать арбитражное правило. Например, селектор 260 гипотез может быть сконфигурирован с возможностью установления перехода края бита, происходящего наиболее близко к известному переходу края бита, на основании времени известного перехода края бита.
Модуль 270 решения местоположения сконфигурирован с возможностью определения решения о местоположении на основании гипотезы хронирования, установленной селектором 260 гипотез. Здесь - измерения псевдодальностей для различных спутников являются не различимыми для модуля 270 решения местоположения по отношению к измерениям псевдодальностей, полученным при помощи обычного подхода. Таким образом, модуль 270 решения местоположения может быть сконфигурирован с возможностью определения решения о местоположении при помощи обычного метода, такого как метод решения местоположения, который может включать в себя метод взвешенных наименьших квадратов, минимальных наименьших квадратов, взвешенный регресс, калмановскую фильтрацию и т.п. или некоторую комбинацию этого.
Модуль 270 решения местоположения может определять решение в сочетании с информацией о местоположении спутника, которая может быть запомнена в памяти 242. Информация о местоположении спутника может быть запомнена, например, как одно или более из спутникового альманаха, спутниковых эфемерид, функции предсказания орбиты спутника или некоторой комбинации этого.
Средство 280 проверки действительности обрабатывает результат модуля 270 решения местоположения, чтобы определить, действительно ли решение. Если это так, то обработка завершается, и местоположение приемника 200 определяется. Если решение о местоположении является недействительным, модуль окон повторно позиционирует окно, и селектор 260 гипотез генерирует другую гипотезу хронирования, подлежащую тестированию. Средство 280 проверки действительности может определять недействительное решение, например, если повторяющийся алгоритм решения о местоположении отказывается сходиться после некоторого предопределенного числа итераций.
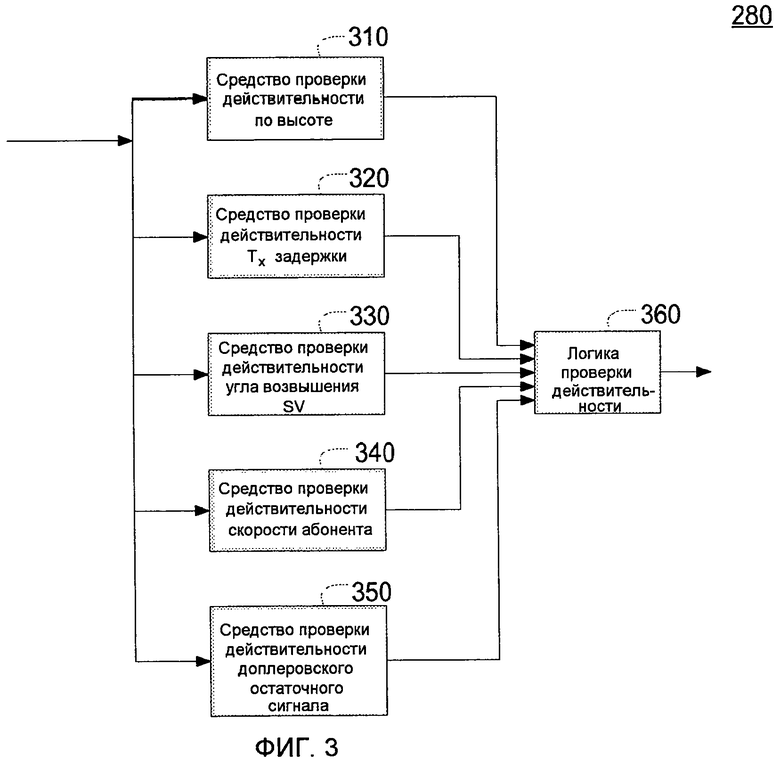
Фиг.3 представляет собой упрощенную диаграмму функциональных блоков варианта осуществления средства 280 проверки действительности. Средство 280 проверки действительности может быть, например, средством проверки действительности в приемнике по фиг.2. Средство 280 проверки действительности принимает информацию о решении местоположения от модуля решения местоположения и обрабатывает информацию согласно некоторому количеству ограничений, чтобы определить действительность решения о местоположении.
Средство 280 проверки действительности может включать в себя средство 310 проверки действительности высоты, средство 320 проверки действительности задержки передачи, средство 330 проверки действительности угла возвышения искусственного спутника, средство 340 проверки действительности скорости абонента, средство 350 проверки действительности доплеровского остаточного сигнала или некоторую комбинацию этого. Каждый из модулей средства 280 проверки действительности функционируют независимо друг от друга, или один или более могут зависеть друг от друга. Количество и тип модулей в пределах средства 280 проверки действительности не ограничиваются теми типами и системами расположениями, проиллюстрированными в варианте осуществления по фиг.3.
Средство 310 проверки действительности высоты может исследовать решение о местоположении и сравнить высоту решения о местоположении с пределами для минимальных и максимальных высот. Например, средство 310 проверки действительности высоты может включать в себя некоторую глубину ниже уровня моря, ниже которой действительные высоты не могут спадать. Подобным образом, средство 310 проверки действительности высоты может включать в себя предопределенную высоту, которую не могут превышать высоты действительных решений местоположении. Высоты, выходящие за пределы предопределенного диапазона, идентифицируются как недействительные решения.
В тех ситуациях, где приемник имеет сведения о высоте или иначе сконфигурирован с возможностью определения двумерного установления местоположения, средство 310 проверки действительности высоты может быть опущено, деактивировано или может игнорироваться иным образом.
Подобным образом, средство 320 проверки действительности задержки передачи исследует задержки распространения для скорректированного хронирования, как определено из решения о местоположении, и определяет, лежит ли какая-либо задержка распространения за пределами предопределенного диапазона. В качестве примера, диапазон задержек распространения для любой точки на земле оценивается, чтобы ранжироваться приблизительно от 65 миллисекунд до 88 миллисекунд, при условии, что искусственные спутники выше нулевого горизонта. Средство 320 проверки действительности задержки передачи может идентифицировать решение как недействительное, если скорректированные задержки распространения из решения о местоположении оказываются вне этого диапазона.
Средство 330 проверки действительности угла возвышения искусственного спутника может определить, находятся ли все искусственные спутники, используемые в решении о местоположении, выше нулевого горизонта. Средство 330 проверки действительности угла возвышения искусственного спутника может исследовать решение о местоположении по отношению к предполагаемым местоположениям искусственных спутников, используемых для получения решения о местоположении. Угол возвышения искусственных спутников может быть определен на основании сведений о решении местоположения и предполагаемом местоположении спутника. Средство 330 проверки действительности угла возвышения SV может идентифицировать решение как недействительное, если любой из углов возвышения искусственного спутника является меньшим, чем ноль.
Средство 340 проверки действительности скорости абонента может вычислять скорость устройства беспроводной связи на основании решения о местоположении и доплеровских значениях от каждого из этих четырех искусственных спутников. Скорость за пределами предопределенного диапазона может привести к идентификации средством проверки действительности скорости абонента решения о местоположении как недействительного.
Средство 350 проверки действительности доплеровского сдвига сравнивает вычисленную скорость изменения псевдодальности с измеренной. Средство 350 проверки действительности доплеровского остаточного сигнала может сравнивать измеренный доплеровский сдвиг с теоретическим доплеровским сдвигом на основании решения о местоположении и определять, больше ли остаточный сдвиг, чем предопределенный порог. Средство 350 проверки действительности доплеровского остаточного сигнала может идентифицировать решение о местоположении как недействительное, если остаточный сдвиг находится вне предопределенного диапазона.
Хотя каждое средство проверки может идентифицировать решение о местоположении как недействительное независимого от другого средства проверки, выходные значения средств проверки все предоставляются логике 360 проверки действительности, которая может принять окончательное решение относительно действительности решения о местоположении на основании одного или более указаний недействительности. Логика проверки действительности может быть сконфигурирована, например, чтобы указывать на недействительный результат единственного недействительного указания, множества недействительных указаний или на основании предопределенной комбинации недействительных указаний или взвешенных комбинаций недействительных указаний.
Фиг.4 является упрощенной блок схемой последовательности операций варианта осуществления способа 400 определения местоположения при помощи установления времени гипотезы. Способ 400 может быть осуществлен, например, приемником с фиг.2 в устройстве беспроводной связи по фиг.1.
Способ 400 начинается в блоке 410, где приемник принимает, по меньшей мере, два спутниковых сигнала, расширенных псевдошумовым кодом. Приемник переходит к блоку 412 и определяет идентификаторы искусственного спутника, например, коррелируя принятые сигналы с локально сгенерированными версиями последовательности псевдошумового кода.
Приемник переходит к блоку 414 и определяет переходы края бита для каждого из, по меньшей мере, двух спутниковых сигналов. Приемник может определить переходы края бита с использованием корреляции и может выполнить интеграцию по нескольким полным периодам псевдошумового кода, чтобы улучшить чувствительность обнаружения.
Приемник переходит к блоку 420 и декодирует, по меньшей мере, одну временную метку или иначе определяет привязку по времени, связанную, по меньшей мере, с одним из спутниковых сигналов. Приемник может, например, демодулировать навигационное сообщение и декодировать временное сообщение из спутникового сигнала.
Приемнику необходимо определить, по меньшей мере, одну привязку по времени, чтобы успешно выполнить способ 400. Однако количество неоднозначных гипотез времени, которое должно быть исследовано, сокращается с каждой дополнительной привязкой по времени. В пределе четырех привязок по времени, для обобщенного решения, основанного исключительно на спутниковых сигналах, способ 400 больше не является необходимым, и приемник может непосредственно определить псевдодальности. Однако приемник может все еще использовать способ для проверки действительности решения о местоположении с использованием пятого спутникового сигнала, для которого привязка по времени не является необходимой.
Приемник переходит к блоку 430 и конфигурирует временное окно относительно переходов края бита на основании позиции известного перехода края бита, соответствующего искусственному спутнику, для которого известна привязка по времени. Продолжительность окна может быть выбрана, чтобы быть приблизительно продолжительностью, которая соответствует разнице между максимальной и минимальной задержками распространения спутникового сигнала. В качестве примера, окно может иметь продолжительность меньше чем приблизительно 22 миллисекунды.
Приемник переходит к блоку 440 и определяет гипотезу хронирования для переходов края бита в пределах окна. Приемник может, например, предположить, что каждый из переходов края бита в окне происходит на основании времени известного перехода края бита.
Приемник переходит к блоку 450 и определяет решение о местоположении на основании измерений псевдодальностей и сведений о местонахождениях искусственных спутников, например, на основании данных альманаха, спутниковых эфемерид, прогноза спутниковых орбит или некоторой комбинации указанных данных. Решение о местоположении может также основываться на релевантной информации о местоположении, если таковая вообще имеется, которая доступна приемнику. Такая релевантная информация о положении может включать в себя, например, оценку высоты приемника, измерение доплеровского сдвига, наблюдаемого в приемнике, совместно с соответствующими псевдодальностями, и т.п. или некоторую комбинацию указанного.
Приемник может определить позицию, например, на основании повторяющегося алгоритма определения местоположения, такого как алгоритм по методу взвешенных наименьших квадратов. Приемник переходит к блоку 452 принятия решения, чтобы определить сходимость алгоритма определения местоположения по решению. В отсутствие сходимости решение недействительно. Приемник переходит к блоку 460.
Если в блоке 452 принятия решения приемник определяет, что алгоритм определения местоположения возвратил решение о местоположении, приемник переходит к блоку 470 принятия решения и определяет, проходит ли решение процесс проверки действительности. Если нет, то приемник переходит к блоку 460.
В блоке 460 приемник сдвигает или иначе реконфигурирует положение окна, чтобы захватить другой набор гипотез перехода края бита. Приемник возвращается от блока 460 к блоку 440, чтобы повторить процесс решения о местоположении/гипотезы хронирования.
Если в блоке 470 принятия решения решение о местоположении удовлетворяет процессу проверки действительности, приемник переходит к блоку 480, чтобы возвратить решение о местоположении как местонахождение приемника.
Фиг.5 является упрощенной блок схемой последовательности операций варианта осуществления способа 470 проверки действительности решения о местоположении. Способ 470 может быть осуществлен приемником, выполняющим способ по фиг.5.
Способ 470 начинается в блоке 510 принятия решения, где приемник определяет, включает ли в себя решение о местоположении высоту в пределах предопределенных пределов. Если нет, то приемник переходит к блоку 560 и идентифицирует решение как недействительное.
Если приемник определяет, что ограничения по высоте удовлетворяются, приемник переходит к блоку 520 принятия решения, чтобы определить, находятся ли задержки распространения от искусственных спутников, используемых в определении решения о местоположении, в пределах предопределенного диапазона значений. Если нет, приемник переходит к блоку 560, чтобы идентифицировать решение как недействительное. Этот этап определения того, находится ли высота решения о местоположении в определенных рамках, конечно, пропускается, когда приемник выполняет двумерное решение о местоположении, используя известную или данную высоту.
Если приемник определяет, что условия ограничения задержки распространения удовлетворяются, приемник переходит к блоку 530 принятия решения, чтобы определить, находятся ли искусственные спутники, используемые в решении о местоположении, выше горизонта для устройства, расположенного в местоположении решения о местоположении. Если нет, приемник переходит к блоку 560, чтобы идентифицировать решение как недействительное.
Если приемник определяет, что условия ограничения возвышения искусственного спутника удовлетворяются, приемник переходит к блоку 540 принятия решения, чтобы определить, попадает ли скорость абонента в предопределенный диапазон или предел. Если нет, то приемник переходит к блоку 560, чтобы идентифицировать решение как недействительное.
Если приемник определяет, что скорость пользователя удовлетворяет ограничениям скорости, приемник переходит к блоку 550 принятия решения, чтобы определить, находятся ли доплеровские остаточные сигналы в предопределенных пределах. Приемник может сравнить измеренный доплеровский сдвиг с теоретическим доплеровским сдвигом на основании решения о местоположении и отклонения тактовой частоты приемника и определить, является ли остаточный сдвиг большим, чем предопределенный порог. Если это так, то приемник переходит к блоку 560, чтобы идентифицировать решение как недействительное. Иначе, приемник переходит к блоку 570 и идентифицирует решение о местоположении как действительное.
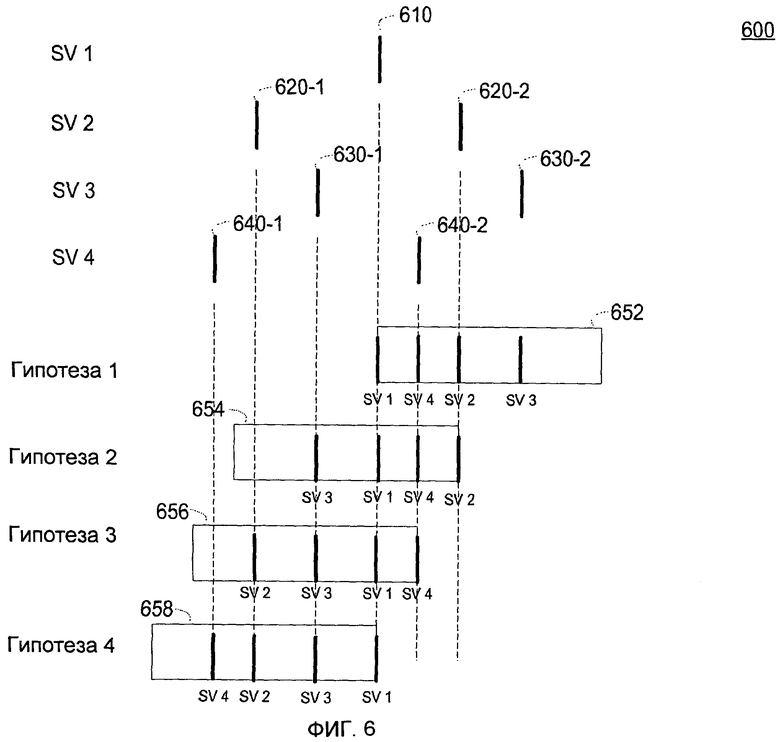
Фиг.6 является упрощенной временной диаграммой 600 примера решения о местоположении, с использованием установления времени гипотезы. Временная диаграмма 600 иллюстрирует переходы края бита для четырех искусственных спутников и четыре возможных гипотезы хронирования, которые могут быть сгенерированы для предопределенной продолжительности окна приблизительно в 22 миллисекунды.
Первый искусственный спутник, как предполагается, является искусственным спутником, для которого известна привязка по времени. Таким образом, переход 610 края бита первого SV является известным и однозначным по времени переходом края бита, и лишь один переход края бита должен быть проиллюстрирован. Время соседних переходов края бита для первого SV может быть определено путем вычитания или добавления 20 миллисекунд к известному переходу края бита, где 20 миллисекунд являются периодом каждого бита.
Второй искусственный спутник имеет два перехода 620-1 и 620-2 края бита, которые могут быть идентифицированы относительно известного перехода 610 края бита первого SV. Однако существует неоднозначность относительно того, синхронизируются ли более ранний переход 620-1 края бита или более поздний переход 620-2 края бита с известным переходом 610 края бита.
Подобным образом, два перехода 630-1 и 630-2 края бита для третьего искусственного спутника показаны относительно известного перехода 610 края бита первого SV. Два перехода 640-1 и 640-2 края бита для четвертого показаны относительно первого известного перехода 610 края бита первого SV.
Первая гипотеза хронирования иллюстрируется на основании первого положения временного окна 652. Каждый переход бита 610, 640-2, 620-2 и 630-2 в пределах окна 652 устанавливается относительно времени известного перехода края бита первого SV. Решение о местоположении может быть определено на основании псевдодальности от каждого искусственного спутника из гипотезы хронирования.
Вторая гипотеза хронирования иллюстрируется на основании второго положения временного окна 654. Временное окно смещается, чтобы захватить, по меньшей мере, один отдельный переход края бита, находящийся не в первом положении окна. Переходы бита 630-1, 610, 640-2 и 620-2 в пределах второго положения временного окна 654 устанавливаются относительно времени известного перехода края бита первого SV. Решение о местоположении может быть определено на основании псевдодальности от каждого искусственного спутника из второй гипотезы хронирования.
Третья гипотеза хронирования иллюстрируется на основании третьего положения временного окна 656. Временное окно смещается, чтобы захватить, по меньшей мере, один отдельный переход края бита. Переходы бита 620-1, 630-1, 610 и 640-2 в пределах третьего положения временного окна 656 устанавливаются относительно времени известного перехода края бита первого SV. Решение о местоположении может быть определено на основании псевдодальности от каждого искусственного спутника из третьей гипотезы хронирования.
Четвертая гипотеза хронирования иллюстрируется на основании четвертого положения временного окна 658. Временное окно смещается, чтобы захватить, по меньшей мере, один отдельный переход края бита. Переходы бита 640-1, 620-1, 630-1 и 610 в пределах четвертого положения временного окна 658 устанавливаются относительно времени известного перехода края бита первого SV. Решение о местоположении может быть определено на основании псевдодальности от каждого искусственного спутника из четвертой гипотезы хронирования.
Следует отметить, что существует всего четыре возможных гипотезы хронирования при использовании окна длительностью, показанной на фиг.6. Дополнительный сдвиг временного окна исключил бы известный переход края бита. Таким образом, приемник должен был бы предпринимать попытку максимум четырех решений о местоположении на основании четырех гипотез хронирования, прежде чем определить правильное решение о местоположении.
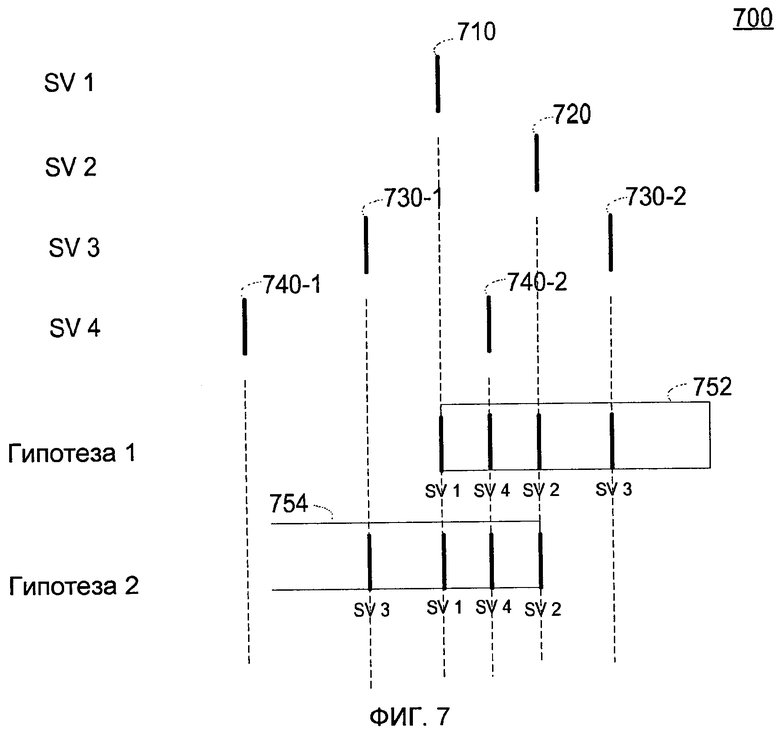
Фиг.7 является упрощенной временной диаграммой 700 примера решения о местоположении при использовании установления времени гипотезы. Временная диаграмма 700 фиг.7 иллюстрирует две известных привязки по времени для двух искусственных спутников. Временная диаграмма 700 иллюстрирует то, каким образом дополнительные сведения второй привязки по времени сокращают количество возможных гипотез хронирования до только двух, когда временное окно имеет длительность показанного порядка.
Временная диаграмма 700 иллюстрирует первый переход 710 края бита для первого искусственного спутника, для которого известна привязка по времени. Подобным образом, второй переход 720 края бита показан для второго искусственного спутника, для которого известна привязка по времени.
Показаны неоднозначные переходы 730-1 и 730-2 края бита для третьего искусственного спутника, а также неоднозначные переходы 740-1 и 740-2 края бита для четвертого искусственного спутника. Привязка по времени отсутствует или не может быть определена для третьего и четвертого искусственных спутников.
Первая гипотеза хронирования может быть сгенерирована путем размещения первого временного окна 752, чтобы захватить, по меньшей мере, первый и второй известные переходы 710 и 720 края бита, а также, по меньшей мере, один переход 740-2 и 730-2 края бита от каждого из искусственных спутников, не имеющих известной привязки по времени.
Вторая гипотеза хронирования может быть сгенерирована путем размещения второго временного окна 754, чтобы захватить, по меньшей мере, первый и второй известные переходы 710 и 720 края бита, а также, по меньшей мере, один переход 730-1 и 740-2 края бита от каждого из искусственных спутников, не имеющих известной привязки по времени. Как показано на фиг.7, существует всего две возможных гипотезы хронирования для временного окна этого размера и положений известных переходов 710 и 720 края бита. Дополнительный сдвиг временного окна исключил бы один из известных переходов края бита из окна.
Способы и устройство, описанные здесь, предназначены для определения решения по определению местоположения, когда известна только одна привязка по времени для множества сигналов SPS спутников, но где переходы края бита, по меньшей мере, для четырех спутниковых сигналов известны, и информация о положении спутника доступна. Способы и устройство позволяют приемнику определять решение о местоположении в средах с плохим покрытием, где информация времени в навигационном сообщении для множества спутниковых сигналов не может быть демодулирована.
Как используется в данной заявке, термин «связанный» или «соединенный» используется, чтобы означать косвенную связь, а также прямую связь или соединение. В том случае, когда два или более блоков, модулей, устройств или средств связаны, может существовать один или более промежуточных блоков между двумя связанными блоками.
Различные иллюстративные логические блоки, модули и схемы, описанные применительно к вариантам осуществления, раскрытым здесь, могут быть осуществлены или выполнены универсальным процессором, процессором цифровой обработки сигналов (DSP), процессором вычислительной машиной с сокращенным набором команд (RISC), интегральной схемой прикладной ориентации, программируемой пользователем вентильной матрицей (FPGA) или другим программируемым логическим устройством, логическим элементом на дискретных компонентах или транзисторными логическими схемами, дискретными аппаратными компонентами или любой комбинацией этого, предназначенной для выполнения функций, описанных здесь. Процессор общего назначения может быть микропроцессором, но в качестве альтернативы, процессор может быть любым обычным процессором, контроллером, микроконтроллером или конечным автоматом. Процессор может также быть осуществлен как комбинация вычислительных устройств, например комбинация DSP и микропроцессора, множества микропроцессоров, одного или более микропроцессоров в соединении с DSP ядром, или любая другая такая конфигурация.
Этапы способа, процесса или алгоритма, описанного применительно к вариантам осуществления, раскрытым здесь, могут быть воплощены непосредственно в аппаратных средствах, в программном модуле, исполняемом процессором, или в комбинации того и другого. Различные этапы или действия в способе или процессе могут быть выполнены в показанном порядке или могут быть выполнены в другом порядке. Дополнительно, один или более процессов или этапы способа могут быть опущены или один или более процессов или этапов способа могут быть добавлены к способам и процессам. Дополнительный этап, блок или действие могут быть добавлены в начале, конце или между существующими элементами способов и процессов.
В одном или более примерных вариантах осуществления описанные функции могут быть осуществлены в аппаратных средствах, программном обеспечении, программируемом оборудовании или любой комбинации этого. При осуществлении в программном обеспечении, функции могут быть сохранены на физическом машиночитаемом носителе как одна или более инструкций, информации или кода, закодированных на носителе. Машиночитаемые носители включают в себя физические компьютерные носители хранения. Носитель хранения данных может быть любым доступным физическим носителем, к которому можно осуществить доступ посредством компьютера. В качестве примера, но не ограничения, такие считываемые компьютером носители могут содержать RAM, ROM, EEPROM, CD-ROM или другое хранилище на оптических дисках, хранилище на магнитных дисках или другие магнитные запоминающие устройства, или любую другую среду, которая может использоваться для переноса или хранения желаемого программного кода в форме инструкций или структур данных и к которой можно осуществить доступ посредством компьютера. Диски, как используется в данной заявке, включают в себя компакт-диск (CD), лазерный диск, оптический диск, цифровой универсальный диск (DVD), гибкий диск и Blu-ray диск, где магнитные диски (disks) обычно воспроизводят данные магнитным способом, в то время как оптические диски (discs) обычно воспроизводят данные оптически при помощи лазеров.
Предшествующее описание раскрытых примеров обеспечено, чтобы позволить любому специалисту в данной области техники осуществить или использовать настоящее изобретение. Различные модификации этих примеров будут полностью очевидны для специалистов в данной области техники, и основные принципы, определенные здесь, могут быть применены к другим примерам, не отступая от сущности или объема изобретения. Таким образом, настоящее изобретение не предназначается, чтобы быть ограниченным примерами, показанными здесь, но должно согласовываться с широким объемом, совместимым с принципами и новыми признаками, раскрытыми здесь.ф

Изобретение относится к беспроводной связи. Технический результат - повышение точности определения местонахождения. Предложенные способы и устройства предназначены для улучшения выполнения определения местоположения, особенно в слабых зонах покрытия. SPS приемник имеет возможность решать задачу определения местоположения в ситуациях, когда, по меньшей мере, два спутниковых сигнала могут быть приняты, но только одна временная метка может быть успешно демодулирована. Приемник может использовать успешно декодированную привязку по времени, чтобы определить время, связанное с переходами края бита для сигналов от этого спутника. Приемник использует переход края бита с известным временем, чтобы установить время, по меньшей мере, для одного перехода края бита для сигналов от других спутников, для которых временная метка не демодулируется. Приемник устанавливает гипотезу времени для переходов края бита, возникающих в пределах предопределенного окна, включающего в себя переход края бита с известным временем. Местоположение может быть определено на основании гипотезы времени. Гипотеза времени и размещение окна могут быть изменены после ошибочных решений местоположения. 6 н. и 23 з.п. ф-лы, 7 ил.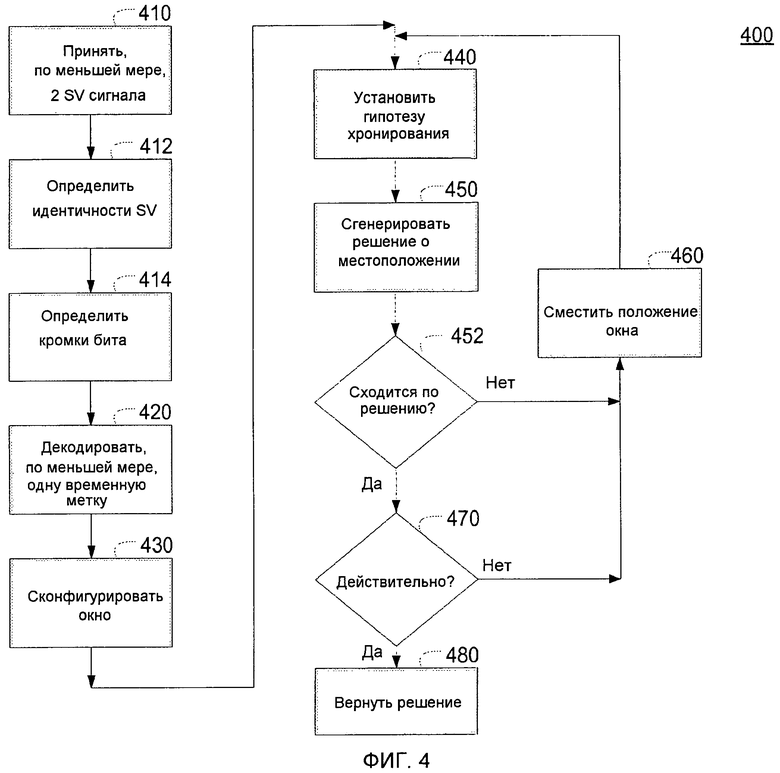
1. Способ определения местоположения, осуществляемый приемником беспроводной связи, причем способ содержит этапы, на которых:
принимают сигнал, расширенный псевдошумовым кодом, от каждого, по меньшей мере, из двух искусственных спутников;
определяют хронирование края перехода бита для каждого сигнала, расширенного псевдошумовым кодом;
определяют привязку по времени для, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом; и
определяют решение по определению местоположения для устройства беспроводной связи на основании упомянутой привязки по времени и хронирования края перехода бита для сигнала, расширенного псевдошумовым кодом, от каждого из, по меньшей мере, двух искусственных спутников.
2. Способ по п.1, дополнительно содержащий этап, на котором коррелируют сигналы, расширенные псевдошумовым кодом, с локально сгенерированной последовательностью псевдошумового кода, чтобы идентифицировать, по меньшей мере, два искусственных спутника.
3. Способ по п.1, дополнительно содержащий этап, на котором определяют время, ассоциированное с краем бита, связанным с привязкой по времени.
4. Способ по п.1, в котором этап приема сигнала, расширенного псевдошумовым кодом, заключается в том, что принимают навигационное сообщение системы глобального позиционирования, расширенное псевдошумовым кодом, соответствующим искусственному спутнику.
5. Способ по п.1, в котором этап определения хронирования края перехода бита содержит этапы, на которых:
коррелируют сигнал, расширенный псевдошумовым кодом, с локально сгенерированной последовательностью псевдошумового кода; и
определяют хронирование перехода инверсии фазы корреляции.
6. Способ по п.1, в котором этап определения привязки по времени заключается в том, что декодируют некоторое или все из навигационного сообщения из, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом.
7. Способ по п.1, в котором этап определения решения по определению местоположения содержит этапы, на которых:
определяют известное время, ассоциированное с краем бита, связанного с привязкой по времени;
конфигурируют временное окно, охватывающее переход бита сигнала, расширенного псевдошумовым кодом, от каждого из, по меньшей мере, двух искусственных спутников;
генерируют гипотезы времени для, по меньшей мере, одного перехода бита в пределах окна для сигнала от, по меньшей мере, одного искусственного спутника, для которого привязка по времени неизвестна; и определяют решение по определению местоположения на основании известного времени и гипотезы времени.
8. Способ по п.7, дополнительно содержащий этапы, на которых:
смещают положение временного окна;
генерируют обновленную гипотезу времени; и
определяют обновленное решение по определению местоположения на основании известного времени и обновленной гипотезы времени.
9. Способ по п.1, дополнительно содержащий этап, на котором выполняют проверку действительности решения по определению местоположения.
10. Способ по п.9, в котором этап проверки действительности решения содержит, по меньшей мере, одно из проверки действительности высоты, проверки действительности задержки распространения передатчика, проверки действительности угла возвышения искусственного спутника, проверки действительности скорости устройства и проверки действительности доплеровского остаточного сигнала.
11. Способ по п.9, в котором этап проверки действительности решения содержит этап, на котором определяют, сходится ли повторяющееся решение о местоположении в пределах предопределенного числа итераций.
12. Способ определения местоположения, осуществляемый приемником беспроводной связи, при этом способ содержит этапы, на которых:
принимают сигнал, расширенный псевдошумовым кодом, от каждого из, по меньшей мере, двух передатчиков сигнала, расширенного псевдошумовым кодом;
определяют хронирование края перехода бита для каждого сигнала, расширенного псевдошумовым кодом;
определяют привязку по времени для первого сигнала, расширенного псевдошумовым кодом;
определяют время, ассоциированное с первым переходом бита для первого сигнала, расширенного псевдошумовым кодом;
конфигурируют временное окно, которое захватывает первый переход бита и, по меньшей мере, один переход бита от второго сигнала, расширенного псевдошумовым кодом, для которого привязка по времени неизвестна;
генерируют гипотезу времени для, по меньшей мере, одного перехода бита от второго сигнала, расширенного псевдошумовым кодом;
определяют решение по определению местоположения для устройства беспроводной связи на основании времени, ассоциированного с первым переходом бита и гипотезой времени для, по меньшей мере, одного перехода бита от второго сигнала, расширенного псевдошумовым кодом; и
выполняют проверку действительности решения по определению местоположения.
13. Способ по п.12, дополнительно содержащий этапы, на которых:
выполняют смещение положения временного окна;
генерируют обновленную гипотезу времени; и
определяют обновленное решение по определению местоположения на основании времени, ассоциированного с первым переходом бита, и обновленной гипотезы времени.
14. Способ по п.12, в котором этап конфигурирования временного окна содержит этап, на котором конфигурируют временное окно продолжительностью, меньшей, чем 22 мс.
15. Способ определения местоположения, осуществляемый приемником беспроводной связи, при этом способ содержит этапы, на которых:
определяют хронирование переходов края бита для каждого из множества сигналов спутниковой системы позиционирования (SPS);
определяют привязку по времени для, по меньшей мере, одного перехода края бита;
генерируют гипотезу времени для множества переходов края бита на основании гипотезы времени и привязки по времени; и
определяют решение по определению местоположения на основании гипотезы времени.
16. Устройство определения местоположения устройства беспроводной связи, содержащее:
приемник, выполненный с возможностью приема множества сигналов, расширенных псевдошумовым кодом, от множества искусственных спутников спутниковой системы позиционирования;
коррелятор, выполненный с возможностью определения хронирования переходов края бита от каждого из множества сигналов, расширенных псевдошумовым кодом;
декодер сообщения хронирования, выполненный с возможностью определения привязки по времени для, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом;
селектор гипотез, выполненный с возможностью определения гипотезы времени для края бита от каждого из множества сигналов, расширенных псевдошумовым кодом; и
модуль решения о местоположении, выполненный с возможностью определения решения по определению местоположения на основании привязки по времени и гипотезы времени для края бита от каждого из множества сигналов, расширенных псевдошумовым кодом.
17. Устройство по п.16, дополнительно содержащее:
модуль окон, выполненный с возможностью определения временного окна, в котором, по меньшей мере, один край бита возникает от каждого из, по меньшей мере, двух сигналов, расширенных псевдошумовым кодом, и
в котором селектор гипотез определяет гипотезу времени для краев бита, возникающих в пределах временного окна.
18. Устройство по п.17, в котором временное окно содержит временное окно с длительностью, меньшей, чем 22 мс.
19. Устройство по п.16, дополнительно содержащее средство проверки действительности, сконфигурированное с возможностью проверки действительности решения по определению местоположения на основании, по меньшей мере, одного предопределенного ограничения.
20. Устройство по п.19, в котором, по меньшей мере, одно предопределенное ограничение содержит, по меньшей мере, одно из ограничения по высоте, ограничения задержки распространения передатчика, ограничения угла возвышения искусственного спутника, ограничения скорости устройства и ограничения доплеровского остаточного сигнала.
21. Устройство по п.16, в котором селектор гипотез обновляет гипотезу времени для края бита от каждого из множества сигналов, расширенных псевдошумовым кодом, если средство проверки действительности указывает на недействительное решение о местоположении.
22. Устройство по п.16, в котором декодер сообщения хронирования определяет привязку по времени путем декодирования сообщения, закодированного на первом из множества сигналов, расширенных псевдошумовым кодом.
23. Устройство по п.16, в котором селектор гипотезы устанавливает время, связанное с краем бита от каждого множества сигналов, расширенных псевдошумовым кодом, на то же самое время.
24. Устройство по п.23, в котором то же самое время определяется на основании привязки по времени и первого края бита для, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом, для которых привязка по времени ассоциирована.
25. Устройство определения местоположения в пределах устройства беспроводной связи, устройство содержащее:
средство для приема сигнала, расширенного псевдошумовым кодом, от каждого из, по меньшей мере, двух искусственных спутников;
средство для определения хронирования края перехода бита для каждого сигнала, расширенного псевдошумовым кодом;
средство для определения привязки по времени для, по меньшей мере, одного из сигналов, расширенных псевдошумовым кодом; и
средство для определения решения по определению местоположения для устройства беспроводной связи на основании привязки по времени и хронирования края перехода бита для сигнала, расширенного псевдошумовым кодом, от каждого из, по меньшей мере, двух искусственных спутников.
26. Устройство по п.25, в котором средство для определения решения по определению местоположения содержит:
средство для определения известного времени, ассоциированного с краем бита, связанного с привязкой по времени;
средство конфигурирования временного окна, охватывающего переход бита сигнала, расширенного псевдошумовым кодом, от каждого из, по меньшей мере, двух искусственных спутников;
средство для генерирования гипотезы времени для, по меньшей мере, одного перехода бита в пределах окна для сигнала, по меньшей мере, от одного искусственного спутника, для которого привязка по времени неизвестна; и
средство для определения решения по определению местоположения на основании известного времени и гипотезы времени.
27. Устройство по п.26, дополнительно содержащее:
средство для смещения положения временного окна;
средство для генерирования обновленной гипотезы времени; и
средство для определения обновленного решения по определению местоположения на основании времени, ассоциированного с первым переходом бита, и обновленной гипотезы времени.
28. Устройство по п.25, дополнительно содержащее средство для проверки действительности решения по определению местоположения.
29. Машиночитаемый носитель, закодированный одной или более машиночитаемыми инструкциями, которые, при исполнении компьютером, побуждают компьютер выполнять действия по:
определению хронирования края перехода бита для каждого сигнала, расширенного псевдошумовым кодом, от множества сигналов, расширенных псевдошумовым кодом;
определению привязки по времени для, по меньшей мере, одного из множества сигналов, расширенных псевдошумовым кодом; и
определению решения по определению местоположения для устройства беспроводной связи на основании привязки по времени и хронирования края перехода бита для каждого из сигналов, расширенных псевдошумовым кодом.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ БЕСПРОВОДНОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ МНОЖЕСТВЕННОГО ДОСТУПА С КОДОВЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1999 |
|
RU2235341C2 |
| RU 2006102370 А, 27.06.2006 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 6266533 B1, 24.06.2001 | |||
| US 6856282 B2, 15.02.2005 | |||
| US 6563461 B1, 13.05.2003. | |||

