Изобретение относится к хирургической инструментальной технике и предназначено для использования при изготовлении хирургического инструмента типа ножниц или диссекторов, используемых при эндохирургических операциях и, в частности, при лапароскопических.
Известен применяемый хирургический инструмент с различным углом наклона ручек управления к оси инструмента. Однако ручки с углом наклона к оси 90 - 130o нарушают координацию движений и ограничивают подвижность инструмента во вращении до 90o при управлении рукой хирурга.
Известен также хирургический инструмент, используемый при лапараскопических операциях, у которого недостаток ограниченной подвижности во вращении самого инструмента частично компенсирован поворотностью только рабочего органа вокруг оси на 360o с помощью "барашка", поворачиваемого пальцем хирурга, а неподвижность самих ручек в пространстве остается ограниченной во вращении, что затрудняет проведение операции, а незначительные перемещения руки хирурга с инструментом в момент поворота "барашка" приводят к большим перемещениям рабочего органа, что не исключает возможное травмирование оперируемого. Кроме того, в этом случае поворотный рабочий орган инструмента и неповоротные ручки находятся в разных плоскостях, что также ухудшает координацию движения инструмента.
Известен хирургический инструмент для рассечения тканей по описанию к а. с. СССР 980703 A 61 B 17/32 1982 г., взятый в качестве прототипа, как и предлагаемый содержит рабочий орган, трубчатую штангу, внутри которой проходит подвижная тяга, корпус и подвижные относительно корпуса ручки, однако ручки этого инструмента имеют возможность только вращения вокруг своей продольной оси, что ограничивает и делает невозможным выбор наиболее удобного и необходимого пространственного положения руки хирурга и инструмента.
Суть предлагаемого инструмента с подвижными и поворотными ручками принципиально отличается от известных инструментов и заключается в том, что ручки выполнены подвижными и могут занимать соосное или несоосное, а под углом к оси положение, при этом одна из ручек - опорная - имеет вилкообразную часть, посредством которой через ось соединена подвижно с вилкообразной частью корпуса, в пространстве которой размещена другая подвижная - управляющая ручка, соединенная через подвижную тягу с рабочим органом и через другую ось с опорной ручкой, что позволяет увеличить подвижность инструмента во вращении до 270o с изменением положения подвижных ручек относительно оси от 70o до соосного положения, при этом обеспечивается выбор наиболее удобного и необходимого положения руки хирурга и инструмента с сохранением полной синхронности их движения, что улучшает качество операции и снижает возможное травмирование тканей или органов оперируемого.
На фиг. 1 показан общий вид инструмента.
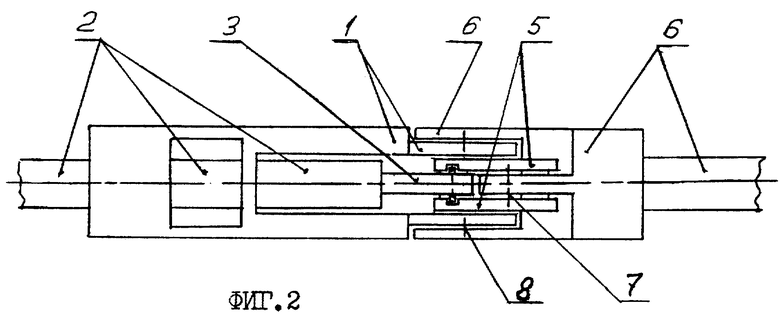
На фиг. 2 - узел соединения ручек и корпуса инструмента.
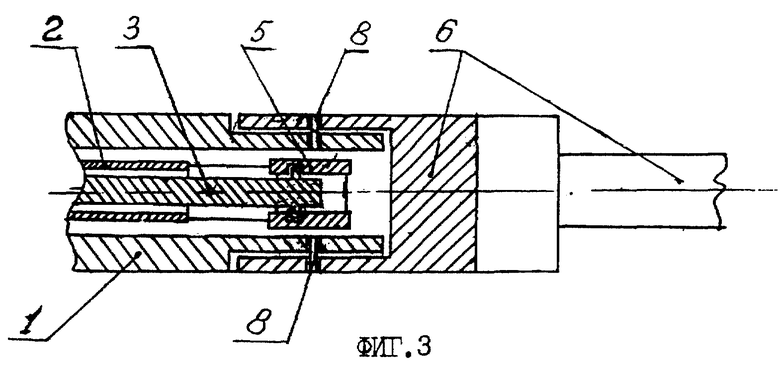
На фиг. 3 - соединение ручек с корпусом по сечению "a-a".
Инструмент по фиг. 1 - 3 состоит из корпуса 1, трубчатой штанги 2, внутри которой находится подвижная тяга 3, одним концом соединенная с рабочим органом 4, а другим концом с управляющей ручкой 5, которая осью 7 соединена с опорной ручкой 6, а она своей вилкообразной частью соединена осью 8 с вилкообразной частью корпуса 1.
Работа инструмента по фиг. 1 - 3 осуществляется следующим образом. Хирург, в руке которого находится инструмент, введенный под наблюдением телескопа через троакар в оперируемую полость, например, живота имеет возможность, удерживая опорную ручку 6 и перемещая относительно ее управляющую ручку 5, соединенную через тягу 3 с рабочим органом 4, например, лезвиями ножниц, осуществлять операционные действия при данном положении инструмента. Но, если хирургу требуется повернуть инструмент, а следовательно, и его рабочий орган 4, изменяя положение руки, но сохраняя координацию движения и удобство работы, хирург, поворачивая инструмент, одновременно меняет положение ручек 5 и 6, изменяя угол наклона их относительно оси инструмента.
Инструмент, ручки 5 и 6 которого находятся в руке хирурга, а все движения рабочего органа, находящегося в полости оперируемого, контролируются через телескоп, хирургом может быть повернут еще настолько, насколько нужно в интервале не менее чем до 270o с одновременным изменением положения ручек 5 и 6 до соосного инструменту положения, что совершенно исключено при использовании известных инструментов.
При любом из описанных положений подвижных на осях 7 и 8 ручек 5 и 6 обеспечивается единая, координированная управляемость инструментом и его рабочим органом 4, которым в данном случае являются лезвия ножниц. Предлагаемый инструмент пригоден и для обычных хирургических операций и с другими видами рабочих органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1997 |
|
RU2178992C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2000 |
|
RU2187249C2 |
| СПОСОБ ЭНДОУРОЛОГИЧЕСКОЙ ОПЕРАЦИИ И ИНСТРУМЕНТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2294154C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2121310C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2001 |
|
RU2240740C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2005 |
|
RU2320276C2 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| ИГЛОДЕРЖАТЕЛЬ ХИРУРГИЧЕСКИЙ | 2002 |
|
RU2223053C1 |
| ДИССЕКТОР | 2004 |
|
RU2264191C1 |
| УСТРОЙСТВО А.Н.ЧУГУНОВА ДЛЯ ДИССЕКЦИИ БИОЛОГИЧЕСКИХ ТКАНЕЙ | 1999 |
|
RU2249435C2 |
Изобретение относится к хирургической инструментальной технике и предназначено для использования при изготовлении инструмента типа ножниц или диссекторов, используемых при эндохирургических и, в частности, при лапароскопических операциях. Инструмент содержит рабочий орган, трубчатую штангу с внутренней подвижной тягой, корпус и подвижные относительно корпуса ручки. Ручки установлены с возможностью изменения положения от 70o до соосного. Опорная ручка имеет вилкообразную часть, которая соединена через ось с вилкообразной частью корпуса. В пространстве вилкообразной части корпуса расположена управляемая ручка. Управляющая ручка соединена через подвижную тягу с рабочим органом и через другую ось с опорной ручкой. В результате обеспечивается выбор наиболее удобного и необходимого положения ручки хирурга и инструмента с сохранением полной синхронности их движения, что улучшает качество операции и снижает возможное травмирование тканей или органов оперируемого. 3 ил.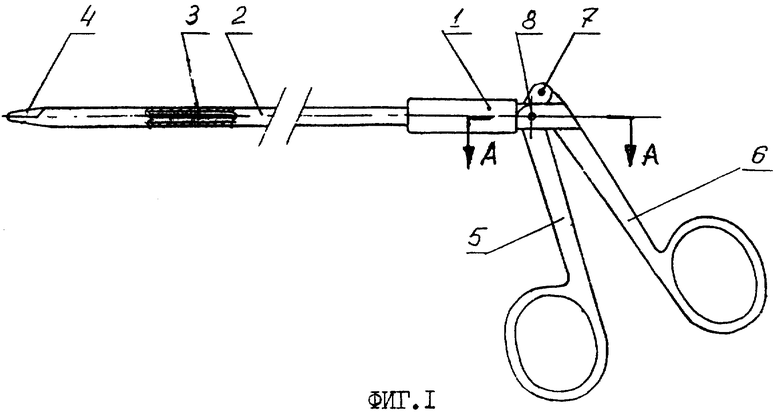
Хирургический инструмент, содержащий рабочий орган, трубчатую штангу, внутри которой проходит подвижная тяга, корпус и подвижные относительно корпуса ручки, отличающийся тем, что подвижные ручки установлены с возможностью изменения положения от 70o до соосного, при этом, опорная ручка имеет вилкообразную часть, соединенную через ось с вилкообразной частью корпуса, в пространстве которой расположена управляющая ручка, соединенная через подвижную тягу с рабочим органом и через другую ось с опорной ручкой.
| Устройство для рассечения тканей | 1980 |
|
SU980703A1 |
| МИКРООПЕРАЦИЙ НА СРЕДНЕМ УХЕ | 0 |
|
SU192346A1 |
| US 4722338 A, 02.02.1988 | |||
| DE 3447769 А, 10.07.1986. | |||

