Изобретение относится к медицинской хирургической технике и предназначено для использования при общехирургических, но особенно при эндохирургических, например, лапароскопических или торакоскопических операциях.
Известен (1) многообразный хирургический инструмент типа захватов, ножниц или зажимов, содержащий непосредственно рабочий орган, корпус, тягу и ручки управления рабочим органом. У всех этих инструментов подвижность ручек осуществляется пальцами руки хирурга как при сведении их осуществляя зажим, так и при разведении их осуществляя разжим. Основной недостаток этих инструментов заключается в том, что усилие зажима рабочих частей этих инструментов зависит прямо от величины прикладываемого хирургом усилия при сведении ручек.
В этом случае усилие не контролируемо и может привести к травмированию тканей оперируемого или к поломке инструмента.
Известен также хирургический инструмент (2), содержащий рабочий орган, корпус, тягу и ручки управления рабочим органом, но при этом имеется пружина, взаимодействующая с ручками, обеспечивая самовозврат их в исходное положение, после осуществления операционного действия и снятия прикладываемого хирургом усилия. Таким образом хирург прикладывает усилие, осуществляя только зажим, а при снятии усилия разжим осуществляется действием пружины. Однако использование этого инструмента, как и инструмента (1), не позволяет контролировать усилие сжатия рабочих частей, а значит, не исключает травмирование тканей оперируемого или поломку инструмента. Известные инструменты могут иметь замок, фиксирующий положение ручек инструмента.
Суть изобретения заключается в том, что предлагаемый инструмент конструктивно выполнен иначе и полностью исключает недостатки известных, поскольку снабжен компенсационно-возвратной пружиной обеспечивающей только необходимое усилие сжатия рабочих органов (частей) инструмента при осуществлении зажима, захвата или другого хирургического действия и возврат инструмента в исходное положение после снятия сжимающего усилия. Это достигается тем, что подвижная ручка через ось соединена непосредственно с пружиной, которая жестко связана с другой неподвижной ручкой, а подвижная ручка при этом взаимосвязана с тягой и имеет возможность поворота относительно соединения с ней.
На чертеже показан общий вид хирургического инструмента с компенсационно-возвратной пружиной.
Хирургический инструмент состоит из рабочего органа 1, корпуса 2, в котором расположена подвижная тяга 3, соединенная с рабочим органом 1 и через ось 4 с подвижной ручкой 5, которая через ось 6 соединена с пружиной 7, другой конец которой соединен с неподвижной ручкой 8. Инструмент может иметь фиксирующий замок 9.
Работа инструмента осуществляется следующим образом. При использовании инструмента для зажима или захвата ткани оперируемого хирург прикладывает усилие сжатия ручек 5 и 8 инструмента, при этом подвижная ручка 5 поворачивается сначала на оси 6 и ее нижняя часть сближается с неподвижной ручкой 8, а верхняя часть ручки 5 тянет тягу 3, расположенную подвижно в корпусе 2 и обеспечивает смыкание разомкнутых рабочих частей рабочего органа 1, а следовательно, захват или зажим ткани оперируемого, но при дальнейшем сжатии ручек 5 и 8 инструмента усилие сжатия рабочих частей органа 1 не изменится, поскольку пружина 7 вместе с ручкой 5 начнет сближаться с неподвижной ручкой 8, но поворачиваясь теперь уже на оси 4 и компенсируя излишнее усилие прикладываемое к ручке 5, сохраняя неизменным положение тяги 3, а следовательно, неизменным и усилие сжатия рабочих частей органа 1. При необходимости хирург может фиксировать положение рабочих частей при зажиме или захвате фиксирующим замком 9, но если усилие сжатия при зажиме или захвате ткани оперируемого снять и освободить фиксацию замка 9, то ручка 5, а с ней тяга 3 и рабочие части органа 1 под действием пружины 7 вернутся в первоначальное положение.
Литература
1. Каталог фирмы "KARL STORZ" ADDITIONAL INSTRUMENTS FOR OPERATIVE LAPAROSCOPY, 3-89, р. 13-14.
2. Каталог фирмы "KARL STORZ" ADDITIONAL INSTRUMENTS FOR OPERATIVE LAPAROSCOPY, 3-90, 26060.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1997 |
|
RU2178991C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2000 |
|
RU2187249C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2001 |
|
RU2240740C2 |
| СПОСОБ ЭНДОУРОЛОГИЧЕСКОЙ ОПЕРАЦИИ И ИНСТРУМЕНТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2294154C2 |
| УСТРОЙСТВО ДЛЯ ЭНДОХИРУРГИЧЕСКИХ МАНИПУЛЯЦИЙ | 1995 |
|
RU2096997C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 1995 |
|
RU2121310C1 |
| ИГЛОДЕРЖАТЕЛЬ ХИРУРГИЧЕСКИЙ | 2002 |
|
RU2223053C1 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2005 |
|
RU2320276C2 |
| СПОСОБ ФИКСАЦИИ ОРГАНОВ И ТКАНЕЙ ПРИ ЛАПАРОСКОПИЧЕСКИХ И ТОРАКОСКОПИЧЕСКИХ ОПЕРАЦИЯХ | 1994 |
|
RU2082324C1 |
| ДИССЕКТОР | 2004 |
|
RU2264191C1 |
Изобретение относится к медицинской технике и предназначено для использования при общехирургических эндохирургических, например, лапароскопических или торакоскопических операциях. Инструмент состоит из рабочего органа с ручками управления, корпуса, тяги и пружины. Пружина выполнена компрессионно-возвратной и соединена одним концом с неподвижной ручкой и другим концом через ось - с подвижной ручкой. Второй осью подвижной ручки служит соединение с тягой рабочего органа. В результате полностью исключаются недостатки известных инструментов, так как пружина обеспечивает только необходимое усилие сжатия рабочих органов (частей) инструмента при осуществлении зажима, захвата или другого хирургического действия и возврат инструмента в исходное положение после снятия сжимающего усилия. 1 ил.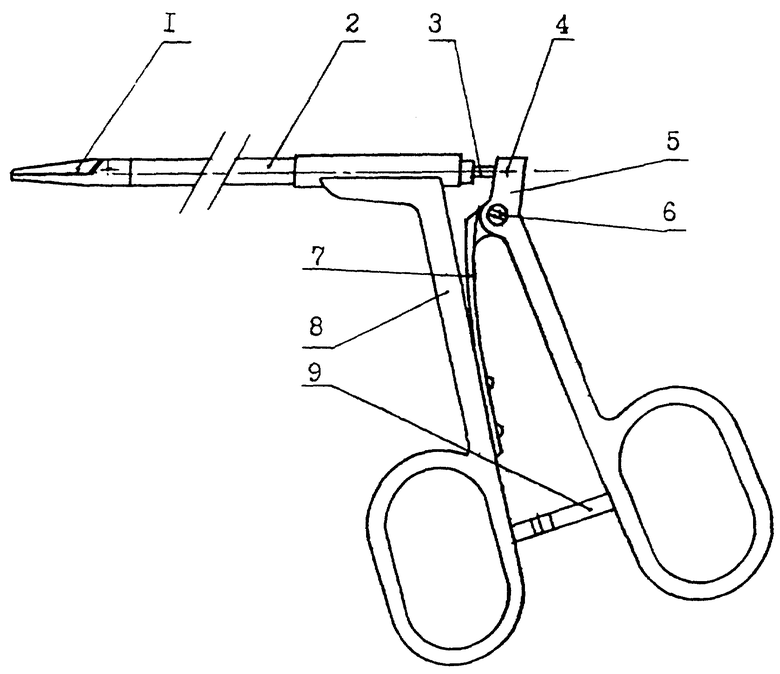
Хирургический инструмент, состоящий из рабочего органа, корпуса, тяги, ручек управления рабочим органом и пружины, отличающийся тем, что пружина выполнена компенсационно-возвратной, при этом пружина одним концом соединена с неподвижной ручкой инструмента, а другим концом через ось - с подвижной ручкой, второй осью которой служит соединение с тягой рабочего органа инструмента.
| КАТАЛОГ ФИРМЫ KARL STORZ "ADDITIONAL INSTRUMENTS FOR OPERATIVE LAPAROSCOPY", 3-90, 26060 | |||
| Смазочный материал | 1973 |
|
SU507622A1 |
| СПОСОБ ПОЛУЧЕНИЯ ФАРМАЦЕВТИЧЕСКОГО СОСТАВА | 1998 |
|
RU2203045C2 |
| Устройство для визуальной прицельной пункции основной пазухи | 1978 |
|
SU719622A1 |

