Изобретение относится к лазерной локации, квантовой электронике и системам наблюдения и может быть использовано в различных локационных и наблюдательных комплексах и системах для обнаружения оптических и оптикоэлектронных приборов наблюдения, расположенных и замаскированных на местности в реальных условиях, а также для обнаружения различных предметов и объектов на охраняемой местности, например, транспортных средств, предметов вооружения, специальной аппаратуры.
Известно устройство обнаружения оптоэлектронных объектов [1], содержащее излучающий канал, включающий источник излучения (лазер) линзу и отражающую призму, приемный канал, включающий объектив, фотоприемный блок, телевизионную камеру, управляемую диафрагму с приводом, блок автоматической регулировки усиления, блок записи изображения. К недостаткам устройства следует отнести невысокую эффективность обнаружения объектов, низкую вероятность правильного обнаружения, невозможность распознавания наблюдаемых объектов. Указанные недостатки обусловлены низкой информативностью данного устройства, в котором обнаружение объектов осуществляется по единственному признаку - величине отраженного оптического сигнала - и на основе простой пороговой обработки принимаемого сигнала в узком спектральном диапазоне подсвечивающего лазерного излучения. Известно устройство обнаружения оптических и оптоэлектронных средств наблюдения [2], содержащее импульсно-периодический лазер, модулятор лазера, интерференционный фильтр, объектив, видеокамеру, ЭОП, блок затворных импульсов, блок обработки сигналов, синхронизатор и блок управления. К недостаткам данного устройства следует отнести низкую эффективность обнаружения объектов, отсутствие возможности распознавания объектов, что обусловлено малой информативностью устройства, в котором обнаружение осуществляется по величине интенсивности отраженного сигнала в узком спектральном диапазоне. В качестве прототипа выбрана лазерная система обнаружения оптоэлектронных объектов по патенту РФ [3], содержащая оптически связанные лазерный генератор - частотно-импульсный лазер, формирователь лазерного пучка (объектив), фотоприемный блок, объектив, сканер лазерного излучения с блоками управления (платформа с шарниром колебательно-вращательного движения), блок управления и обработки информации и формирователь управляющих импульсов, блок определения координат ОЭО, счетчик импульсов, а также датчик углового положения, пороговое устройство интенсивности лазерного излучения, интерференционный фильтр, сигнальное устройство. К недостаткам данного устройства следует отнести невысокую вероятность и эффективность правильного обнаружения объектов наблюдения - приборов и средств оптического и оптико-электронного типа, а также и других объектов на охраняемой местности, например, транспортных средств, замаскированной специальной аппаратуры. Это обусловлено низкой информативностью данного устройства, в котором обнаружение объектов осуществляется в узком спектральном диапазоне на одной длине волны, генерируемой лазерным генератором. Обнаружение объектов осуществляется посредством единичной пороговой обработки принятого лазерного излучения. Это исключает возможность распознавания обнаруженных объектов и определение их принадлежности к оптикоэлектронным (ОЭ) приборам соответствующих классов, снижает достоверность получаемой информации и вероятность правильного обнаружения объектов. Вследствие этого данное устройство не реализует возможность извлечения из принимаемых оптических сигналов большого объема информации, содержащейся в структуре отраженного излучения. Отсутствует также возможность точной привязки координат обнаруженных объектов к единой глобальной навигационной системе (географических) координат, что затрудняет использование данного устройства для проведения контрольно-поисковых и разведывательных операций в заданных районах и участках охраняемой местности.
Рассмотренные устройства-аналоги способны осуществлять обнаружение оптических и оптоэлектронных средств наблюдения при наличии яркого отраженного пятна-блика от наблюдаемого ОЭ прибора, т.е. при наличии так называемой бликовой ситуации. Однако современные оптические и ОЭ приборы как правило снабжаются специальными антибликовыми прозрачными покрытиями, при облучении которых отражательный блик отсутствует в узком спектральном диапазоне или сведен до минимума в широком спектральном диапазоне. В этом случае обнаружение объектов с помощью указанных устройств-аналогов становится малоэффективным, а распознавание объектов оказывается вообще невозможным.
В предлагаемой системе для обнаружения объектов решена задача наиболее полного извлечения информации из принимаемого излучения, отраженного от обнаруженного объекта в контролируемом объеме пространства (КОП). Эта задача решена на основе осуществления подсвета КОП единым сканирующим пучком лазерного излучения (ЛИ) в видимом диапазоне длин волн, в инфракрасном диапазоне длин волн, а также одновременно в СВЧ-диапазоне длин волн. При этом решается задача регистрации тонкой временной структуры отраженных от КОП сигналов лазерных излучений в видимом и ИК диапазонах длин волн и в СВЧ-диапазоне. В результате реализуется более высокая информативность получаемых результатов обработки принимаемых сигналов. Этим обеспечивается более высокая эффективность обнаружения объектов, реализуется повышение вероятности обнаружения и распознавания объектов, обеспечивается возможность определения характера наблюдаемых объектов и отнесение их к объектам соответствующего класса (типа). При этом указанные результаты реализованы в предлагаемой системе при отсутствии бликовой ситуации. Таким образом предлагаемая система обеспечивает высокую эффективность обнаружения и возможность распознавания современных оптических и оптикоэлектронных (ОЭ) приборов со специальными антибликовыми покрытиями, обнаружение которых представляет значительную проблему и малоэффективно для известных устройств наблюдения и обнаружения ОЭ-приборов.
Достигаемым новым техническим результатом является повышение эффективности обнаружения и вероятности правильного обнаружения и распознавания объектов - оптических и оптикоэлектронных приборов и средств наблюдения, повышение точности определения координат обнаруженных объектов и привязки их координат к единой глобальной навигационной системе координат. Указанный технический результат достигается следующим.
1. В системе обнаружения объектов, содержащей последовательно установленные на первой оптической оси, оптически связанные первый лазерный генератор, формирователь лазерного пучка, отражательное зеркало, сканер лазерного излучения, первый и второй блоки управления сканером, первый фотоприемный блок, оптически связанный с первым объективом, оптический вход которого посредством отражательного зеркала связан со сканером лазерного излучения, формирователь управляющих импульсов, выход которого подключен к управляющему входу первого лазерного генератора, блок управления и обработки информации, выходы которого подключены к формирователю управляющих импульсов, первому и второму блокам управления сканером, введены первый дефлектор лазерного излучения, установленный на первой оптической оси между оптическим выходом первого лазерного генератора и оптическим входом первого формирователя лазерного пучка, установленные на второй оптической оси оптически связанные второй генератор лазерного излучения, второй дефлектор лазерного излучения, второй формирователь лазерного пучка, выход которого посредством отражательного зеркала связан со сканером лазерного излучения, установленные на третьей оптической оси оптически связанные третий генератор лазерного излучения, третий дефлектор лазерного излучения и третий формирователь лазерного пучка, выход которого посредством отражательного зеркала связан со сканером лазерного излучения, оптически связанные второй фотоприемный блок и второй объектив, оптический вход которого посредством отражательного зеркала связан со сканером лазерного излучения, приемо-передатчик СВЧ-диапазона, снабженный сканером, подсоединенный своим выходом к блоку обработки сигналов приемо-передатчика, первый многоканальный усилитель, электрически связанный с первым многоканальным блоком памяти, второй многоканальный усилитель, электрически связанный со вторым многоканальным блоком памяти, блок обработки оперативной информации, первый и второй приемники сигналов спутниковой глобальной навигационной системы, первый и второй блоки связи, блок эталонных отражателей, первый блок динамической спектральной фильтрации с блоком управления, установленный на четвертой оптической оси перед первым объективом, второй блок динамической спектральной фильтрации с блоком управления, установленный на пятой оптической оси перед вторым объективом, при этом выходы первого и второго фотоприемных блоков подключены соответственно к первому и второму многоканальным усилителям, выходы первого и второго многоканальных блоков памяти подсоединены ко входам блока обработки оперативной информации, выходы первого приемника сигналов спутниковой глобальной навигационной системы и первого блока связи подключены к блоку обработки оперативной информации, выход блока управления и обработки сигналов приемопередатчика СВЧ-диапазона подключен к блоку обработки оперативной информации, выход которого подключен к блоку управления и обработки информации, управляющие входы второго и третьего лазерных генераторов подключены к формирователю управляющих импульсов, вход которого подключен к выходу блока управления и обработки информации, управляющие входы первого, второго и третьего дефлекторов лазерного излучения подключены к блоку управления и обработки информации, управляющий вход сканера приемо-передатчика СВЧ-диапазона подсоединен к блоку управления и обработки информации, управляющие входы первого и второго фотоприемных блоков, первого и второго блоков динамической спектральной фильтрации подключены к блоку управления и обработки информации, выход второго приемника сигналов спутниковой глобальной навигационной системы подключен ко второму блоку связи.
2. В системе по пункту 1, первый и второй фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
3. В системе по пункту 1 блок эталонных отражателей выполнен на основе совместно расположенных уголковых отражателей оптического видимого диапазона длин волн, ИК-диапазона длин волн и СВЧ-диапазона длин волн.
4. В системе по пункту 1 блок эталонных отражателей, второй приемник сигналов спутниковой глобальной навигационной системы и второй блок связи расположены совместно и конструктивно объединены.
5. В системе по пункту 1 первый и второй динамические спектральные фильтры выполнены на основе акустооптической ячейки, в которой под воздействием блока управления возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
6. В системе по пункту 1 в качестве лазерных генераторов видимого диапазона длин волн и инфракрасного диапазона длин волн использованы лазерные генераторы с перестройкой длин волн генерации в указанных диапазонах.
Сущность изобретения поясняется схемой системы обнаружения, приведенной на фиг.1, а также осциллограммами, приведенными на фиг.2 и 3.
В блок-схеме системы на фиг.1 обозначены следующие элементы.
1. Первый лазерный генератор.
2, 3. Второй и третий лазерные генераторы.
4, 5, 6. Первый, второй и третий дефлекторы лазерного излучения (ЛИ).
7, 8, 9. Первый, второй и третий формирователи лазерных пучков.
10. Сканер лазерного излучения.
11. Первый блок управления сканером (в азимутальном направлении).
12. Второй блок управления сканером (в вертикальной плоскости).
13. Первый фотоприемный блок.
14. Второй фотоприемный блок.
15. Первый многоканальный усилитель.
16. Второй многоканальный усилитель.
17. Первый многоканальный блок памяти.
18. Второй многоканальный блок памяти.
19. 20. Первый и второй объективы.
21. Первый динамический спектральный фильтр с блоком
управления 22.
23. Второй динамический спектральный фильтр.
24. Блок управления второго динамического спектрального фильтра.
25. Блок обработки оперативной информации.
26. Блок управления и обработки информации.
27. Приемо-передатчик СВЧ-диапазона.
28. Блок управления и обработки сигналов приемо-передатчика.
29. Сканер приемо-передатчика.
30. Первый приемник сигналов спутниковой глобальной навигационной системы.
31. Первый блок связи.
32. Блок эталонных отражателей.
33. Второй приемник сигналов спутниковой глобальной навигационной системы.
34. Второй блок связи.
35. Отражатель приемо-передатчика СВЧ-диапазона.
36. Облучатель.
37. Формирователь управляющих импульсов.
38-42. Отражательные зеркала.
43, 44, 48. Эталонные отражатели оптического диапазона.
45, 46. Эталонные отражатели СВЧ-диапазона.
47. Контролируемый объем пространства (КОП).
(Нумерация оптических осей на фиг.1 осуществляется, начиная от первой оптической оси, связанной с отражательным зеркалом 38, сверху вниз, а также слева направо вниз от зеркала сканера лазерного излучения 10.)
Далее рассмотрим последовательно принцип функционирования системы. Следует отметить, что до начала штатного функционирования предлагаемой системы осуществляется этап функционального контроля, при котором осуществляется пространственное совмещение диаграмм направленности лазерных излучений, формируемых в данной системе, а также излучения передатчика СВЧ-диапазона на одном геометрическом направлении в пространстве предметов, а также осуществляют пространственную привязку визирных осей сканера ЛИ, сканера приемо-передатчика и формируемых ЛИ и СВЧ-излучения к единой глобальной навигационной системе координат.
Данную привязку координат осуществляют с помощью блока эталонных отражателей и первого и второго приемников сигналов спутниковой глобальной навигационной системы. Указанный этап функционального контроля и настройки системы рассмотрен ниже. Вначале рассматривается этап собственно штатного функционирования системы, при этом описание работы системы излагается в предположении, что совмещение визирных осей лазерных пучков и СВЧ-излучения осуществлено, а также осуществлена пространственная привязка визирных осей сканера ЛИ и сканера приемо-передатчика и измеряемых пространственных координат объектов к глобальной навигационной системе координат.
Функционирование системы в штатном режиме начинается с облучения контролируемого объема пространства (КОП) 47 сканируемым лазерным излучением на двух длинах волн видимого диапазона и на одной длине волны ПК диапазона. Одновременно осуществляется облучение КОП на одной длине волны СВЧ-диапазона (СВЧ диапазон миллиметровых волн). Для этого осуществляется генерация ЛИ с помощью первого и второго лазерных генераторов поз.1 и 2 на фиг.1 (видимый диапазон) и генерация ЛИ ИК диапазона с помощью третьего лазерного генератора поз.3. Генерация излучения СВЧ-диапазона осуществляется посредством приемопередатчика СВЧ-диапазона 27. При этом лазерные генераторы 1-3 генерируют периодическую последовательность коротких импульсов ЛИ под управлением формирователя коротких импульсов 37. Сканирование ЛИ в некотором ограниченном диапазоне пространственных углов осуществляют с помощью дефлекторов ЛИ поз.4, 5, 6 видимого (поз.4, 5) и ИК (поз.6) диапазонов длин волн. При этом сканирование ЛИ осуществляется по вертикали и горизонтали - угол места и азимут. Сканирование осуществляется с помощью двухкоординатных дефлекторов ЛИ 4-6, управляемых от блока 26 управления и обработки информации. Далее ЛИ с выходов дефлекторов 4-6 поступает на отражательное зеркало сканера лазерного излучения 10, который осуществляет сканирование ЛИ в более широком диапазоне пространственных углов с помощью первого блока управления сканером ЛИ поз.11 - в азимутальном направлении, - и с помощью второго блока управления сканером ЛИ 12 в вертикальной плоскости. Формирователи лазерных пучков 7, 8, 9 осуществляют формирование пучков ЛИ заданной расходимости и площади сечения с выходов дефлекторов ЛИ 7-9. Таким образом, с помощью лазерных генераторов, двухкоординатных дефлекторов ЛИ и сканера ЛИ 10 осуществляется сканирование КОП 47 лазерным излучением на трех длинах волн. При этом характер сканирования может быть выбран любым, в зависимости от заданной программы в блоке 26 управления и обработки информации, например, построчное сканирование КОП, сканирование в виде спиральной развертки лазерных пучков. При этом сканер ЛИ 10 осуществляет относительно медленное сканирование визирной оси устройства с дискретным большим перемещением и дискретными остановками, а дефлекторы ЛИ 4-6 осуществляют быстрое сканирование ЛИ в небольшом диапазоне углов вблизи каждого фиксированного положения визирной оси ЛИ, задаваемой сканером ЛИ 10. Отраженное от КОП 37 ЛИ возвращается назад и от главного зеркала сканера ЛИ 10 поступает на оптические входы первого и второго фотоприемных блоков 13, 14, где осуществляется регистрация (прием) ЛИ и преобразование его в электрические сигналы. Аналогичным образом осуществляется сканирование КОП импульсно-периодическим излучением СВЧ-диапазона с помощью приемо-передатчика СВЧ-диапазона 27. Генерация радиоизлучения и его прием осуществляется с помощью блока управления и обработки сигналов 28 приемо-передатчика СВЧ-диапазона. Сканирование радиоизлучения осуществляется с помощью сканера 29 приемо-передатчика в горизонтальной и вертикальной плоскостях. Следует отметить, что при сканировании КОП лазерным излучением на трех длинах волн и излучением СВЧ-диапазона осуществляется совмещение всех четырех видов излучений на одном и том же участке (элементе) КОП с помощью сканера ЛИ 10, дефлекторов 4-6 и сканера приемо-передатчика 29. В результате приема ЛИ и излучения СВЧ-диапазона, отраженных от КОП, регистрируется информация, характеризующая отражательные характеристики каждого отдельного конкретного участка (элемента) КОП на трех длинах волн ЛИ и на длине волны СВЧ-диапазона. В совокупности данная информация на четырех длинах волн характеризует свойства объекта, находящегося в соответствующей точке участка КОП. Эта информация используется для обнаружения объекта, возможно находящегося в этой точке, а также для идентификации обнаруженного объекта. Прием ЛИ, отраженного от КОП на трех длинах волн, осуществляется с помощью двух фотоприемных блоков 13, 14. Первый фотоприемный блок 13 осуществляет прием и регистрацию ЛИ в видимом диапазоне на двух длинах волн последовательно во времени. Второй фотоприемный блок 14 осуществляет прием и регистрацию ЛИ на одной длине волны в инфракрасном диапазоне. Объективы 19, 20 осуществляют формирование изображения некоторого участка (элемента) из КОП в плоскости фоточувствительных площадок первого и второго фотоприемных блоков 13, 14. Каждый из динамических спектральных фильтров 21, 23 осуществляет выделение соответствующей узкой спектральной полосы из принимаемого ЛИ, отраженного от КОП, в соответствии со спектральным составом ЛИ, генерируемого лазерными генераторами 1, 2, 3. Лазерные генераторы осуществляют генерацию коротких импульсов ЛИ на соответствующих длинах волн последовательно во времени. На оптические входы - фоточувствительные площадки -фотоприемных блоков 13, 14 в каждый момент времени поступает только какой-либо один импульс ЛИ, отраженный от КОП. Динамические спектральные фильтры 21, 23 осуществляют узкополосную спектральную фильтрацию лазерного излучения, отраженного от КОП, соответствующего ЛИ, генерируемого лазерными генераторами 1-3. Длины волн спектральной фильтрации динамических спектральных фильтров 21, 23 соответствуют длинам волн ЛИ, генерируемого лазерными генераторами 1-3. Длина волны спектральной полосы фильтрации динамического спектрального фильтра 23 соответствует длине волны излучения лазерного генератора 3 в ИК-диапазоне. Динамический спектральный фильтр 21 вначале осуществляет выделение спектральной полосы генерации лазерного генератора 1, а затем осуществляется его быстрая перестройка для выделения длины волны генерации лазерного генератора 2. Оба лазерных генератора 1 и 2 работают в видимом диапазоне, но на различных длинах волн. Использование динамических спектральных фильтров позволяет осуществлять прием излучения во всем видимом диапазоне длин волн с помощью одного фотоприемного блока 13, имеющего чувствительность в видимом диапазоне, путем осуществления быстрой подстройки длины волны фильтруемой полосы пропускаемого ЛИ в динамическом спектральном фильтре 21 в соответствии с длиной волны генерируемого ЛИ от соответствующего лазерного генератора 1, 2. Соответственно при использовании лазерных генераторов 1-3 с перестройкой длины волны генерации (дискретно по времени) динамические спектральные фильтры осуществляют оперативную подстройку узкой полосы своего пропускания в соответствии с длиной волны ЛИ, генерируемой соответствующим лазерным генератором с перестройкой длины волны генерации ЛИ. Это осуществляется в видимом (динамический фильтр 21) и в ИК-диапазоне длин волн (динамический фильтр 23). Перестройка динамических спектральных фильтров осуществляется по управляющим сигналам от блоков управления 22, 24. Динамические спектральные фильтры 21, 23 осуществляют дополнительную функцию стробирования по времени принимаемого ЛИ, так как пропускание оптического сигнала, проходящего через динамический спектральный фильтр, осуществляется только в момент времени поступления на этот динамический фильтр управляющего импульса от соответствующего блока управления 22, 24. Таким образом, импульсы от указанных блоков управления обеспечивают стробирование принимаемого ЛИ, отраженного от КОП, в некотором диапазоне дальностей на заданную глубину анализируемого пространства в КОП. Одновременно динамические спектральные фильтры 21, 23 осуществляют функцию защиты фотоприемных блоков 13, 14 от помехи обратного рассеивания, возникающей при распространении сформированных лазерных излучений от сканера ЛИ 10 до КОП. Наличие узкой спектральной полосы пропускания в динамических спектральных фильтрах 21, 23 обеспечивает также защиту фотоприемных блоков от засветки внешним фоновым излучением, что обуславливает возможность эффективной работы предлагаемой системы обнаружения объектов в дневное время суток при повышенном уровне естественного фонового излучения. Фотоприемные блоки 13, 14 представляют собой матричные многоэлементные фотоприемники, типа матричных ФЭУ, регистрирующие с высоким временным разрешением тонкую временную структуру отраженного от КОП лазерного излучения. Многоканальные усилители 15, 16 осуществляют усиление электрических сигналов с каждого из выходов фотоприемных блоков. Далее усиленные сигналы поступают на входы первого 17 и второго 18 многоканальных блоков памяти, в которых осуществляется одновременная и параллельная оцифровка и запоминание усиленных электрических сигналов со всех выходов каналов многоканальных усилителей 15, 16. В запоминающих регистрах многоканальных блоков памяти 17, 18 запоминается весь массив информации, принятый фотоприемными блоками 13, 14 в результате приема (регистрации) лазерных излучений на трех длинах волн. Данная информация, как было отмечено, характеризует отражательные свойства (параметры) некоторой точки (области) в КОП, на которую была направлена визирная ось сканера ЛИ 10, при облучении КОП сформированным лазерным излучением. Далее зарегистрированная информация с выходов многоканальных блоков памяти 17, 18 считывается и поступает в блок обработки оперативной информации 25. В последнем осуществляется оперативная обработка информации, поступающей от отдельных элементов (участков) КОП на каждой из трех длин волн по некоторому заданному алгоритму (программе) от светоотражающих объектов, расположенных в КОП. Одновременно в блоке 25 осуществляется измерение дальности до обнаруженного объекта по стандартному алгоритму измерения данной величины на основании измерения временной задержки принятого импульса относительно излученного импульса ЛИ. Аналогичным образом с помощью приемо-передатчика СВЧ-диапазона 27 осуществляется облучение и сканирование КОП импульсно-периодическим СВЧ-излучением, осуществляется прием излучения СВЧ-диапазона, отраженного от соответствующих элементов (участков) КОП синхронно и одновременно с облучением этих участков лазерным излучением на трех длинах волн, генерируемых лазерными генераторами 1,2,3. Сканирование КОП лазерным излучением на трех длинах волн осуществляется синхронно и одновременно со сканированием КОП излучением СВЧ-диапазона с помощью сканера приемо-передатчика 29. Блок управления и обработки сигналов приемопередатчика 28 СВЧ-диапазона осуществляет генерацию импульсно-периодического излучения соответствующего диапазона СВЧ длин волн (порядка 1-10 мм), прием, усиление и регистрацию импульсов отраженного от КОП радиоизлучения, для чего в блоке 28 имеются соответствующие средства генерации, усиления, детектирования и запоминания коротких импульсов с необходимой разрешающей временной способностью. Принятые и запомненные электрические импульсные сигналы с выхода блока 29 поступают на вход блока обработки оперативной информации 25. Таким образом, в блоке 25 для каждого элемента (участка) КОП 47, на который в каждый отдельный момент времени направлена визирная линия сканера ЛИ 10 и одновременно визирная линия приемо-передатчика СВЧ -радиодиапазона 27, образуется информация о характере оптического сигнала ЛИ, отраженного от этого элемента, и одновременно о характере сигнала СВЧ-диапазона, отраженного от этого же элемента (участка) КОП, а также информация о величине дальности до этого элемента. Информация о дальности до элемента (объекта) вместе с информацией о пространственном направлении визирных осей сканера ЛИ и приемо-передатчика СВЧ-диапазона образуют пространственные координаты указанного элемента (участка КОП), в формате глобальной навигационной системы координат. При этом регистрируется не только величина интенсивности излучения, отраженного от соответствующего элемента, но и тонкая временная структура отраженного сигнала, содержащая информацию об отражательных характеристиках этого элемента вглубь от фронтальной (картинной) плоскости КОП. Это достигается за счет высокой временной разрешающей способности в каждом фоточувствительном элементе фотоприемных блоков 13, 14 типа матричных ФЭУ (фотоэлектронных умножителей), и вследствие запоминания этих принятых сигналов с помощью многоканальных блоков памяти 17, 18 и запоминающих регистров в блоке 28 управления и обработки сигналов приемо-передатчика. При этом многоэлементные фотоприемники фотоприемных блоков 13, 14 осуществляют указанную регистрацию ЛИ одновременно в нескольких элементах разрешения оптической приемной системы, включающей объективы 19, 20 и фоточувствительные площадки фотоприемных блоков 13, 14. Это позволяет регистрировать структуру отраженного от КОП сигнала ЛИ по всему сечению пятна (пучка) ЛИ, освещающего в данный момент времени КОП, при данном конкретном положении визирной оси сканера ЛИ 10 и визирной оси сканера 29 приемопередатчика. При этом, как отмечалось, регистрируется тонкая временная структура принятых сигналов ЛИ, отраженных от КОП, то есть реализуется высокая разрешающая способность по дальности в каждом элементе приема фоточувствительных матричных фотоприемников фотоприемных блоков 13, 14 на трех длинах волн ЛИ. На этом в предложенной системе заканчивается этап сканирования КОП лазерным излучением на трех длинах волн и излучением СВЧ-диапазона. Далее в блоке 25 обработки оперативной информации производится обработка полученного массива информации, в результате чего осуществляется обнаружение объектов, находящихся в КОП, и определяется принадлежность обнаруженных объектов к соответствующему классу (типу) объектов. Вначале в блоке 25 осуществляется предварительная обработка полученной информации, представляющая собой пороговую обработку зарегистрированных сигналов. Пороговая обработка заключается в том, что при превышении величиной зарегистрированного сигнала некоторого порогового уровня в блоке 25 выносится решение о предварительном обнаружении некоторого объекта в некоторой области КОП, координаты которой, полученные и измеренные относительно глобальной системы координат, также фиксируются в блоке 25. Далее в блоке 25 осуществляется подробный анализ параметров и характеристик сигналов, соответствующих области в КОП, в которой обнаружен объект на основе простого превышения порогового уровня. При этом анализируется тонкая временная структура зарегистрированных сигналов, соответствующая отражательным характеристикам данной области (элемента) КОП в трех фиксированных длинах волн видимого и ИК диапазонов и на одной длине волны СВЧ-диапазона. На основании анализа указанных электрических сигналов, а также сравнения их характеристик с банком данных эталонных отражательных характеристик сигналов, хранящихся в блоке 25, в последнем выносится окончательное решение об обнаружении объекта в КОП и о принадлежности этого объекта к некоторому классу известных объектов, например, о принадлежности к оптикоэлектронным или наблюдательным приборам конкретного типа (бинокль, стереотруба, ОЭ разведывательный прибор и т.п.). Высокая информативность получаемых и регистрируемых сигналов в различных диапазонах длин волн, анализ тонкой структуры сигналов обуславливает повышение эффективности обнаружения объектов различных классов, обеспечивает увеличение достоверности и вероятности правильного обнаружения и распознавания объектов с помощью предлагаемой системы обнаружения. Далее информация об обнаруженных объектах, их координатах в системе глобальных координат и их принадлежности к известному классу объектов из блока 25 поступает в блок 26, отображается на дисплее этого блока, а также поступает различным потребителям данной информации, например, на центральный пункт наблюдения. На этом цикл обнаружения объектов в КОП и их распознавания завершается.
Далее рассмотрим операцию совмещения визирных осей ЛИ видимого и ИК диапазонов длин волн и СВЧ-диапазона, которая, как отмечалось выше, выполняется на начальном этапе работы системы обнаружения до осуществления сканирования КОП. Решение данной задачи необходимо для обеспечения эффективной работы системы обнаружения и получения высокоинформативных сигналов ЛИ и СВЧ излучений, отраженных от одного и того же элемента (участка) КОП. Указанная задача решается в рассматриваемой системе обнаружения с помощью блока эталонных отражателей 32 (фиг.1). Блок эталонных отражателей 32 представляет собой единую компактную конструкцию, которая содержит уголковые отражатели (световозвращатели) видимого и ИК диапазонов длин волн поз.43, 44, 48 и расположенные совместно с ними уголковые отражатели СВЧ-диапазона 45, 46. Блок 32 при облучении его лазерным излучением видимого и ИК диапазонов длин волн, а также излучением СВЧ-диапазона создает некоторый отраженный эталонный сигнал, по которому осуществляется настройка и тестирование направлений в пространстве визирных осей сканера ЛИ 10 и сканера приемо-передатчика 29 СВЧ-диапазона. Это обусловлено тем, что уголковые отражатели в блоке 32 имеют известные эталонные отражательные характеристики в соответствующих диапазонах длин волн. Блок 32 снабжен также приемником сигналов спутниковой глобальной навигационной системы 33 и блоком связи 34, обеспечивающим передачу координат места расположения блока 32 через первый блок связи 31 в блок обработки оперативной информации 25. Блок эталонных отражателей 32 расположен на реальной местности по направлению линии, соединяющей оптическую часть предлагаемой системы - сканер ЛИ 10, - и КОП 47, на некотором фиксированном расстоянии от сканера ЛИ 10, например, на расстоянии - 100 метров. Возможно также другое расположение блока эталонных отражателей 32, например, на линии, перпендикулярной линии, соединяющей сканер ЛИ 10 и КОП 47. В этом случае сканер ЛИ 10 и сканер приемо-передатчика 29 должны быть повернуты на угол 90 градусов относительно указанной линии, соединяющей сканер ЛИ 10 и КОП. Далее сканер ЛИ 10 и сканер приемопередатчика 29 осуществляют одновременное сканирование лазерного излучения и излучения СВЧ-диапазона в пределах участка пространства, в котором расположен блок эталонных отражателей 32. Осуществляется стандартная генерация ЛИ посредством лазерных генераторов 1-3 и генерация излучения СВЧ-диапазона с помощью генератора приемопередатчика СВЧ-диапазона 27, входящего в состав блока 28 управления и обработки сигналов приемо-передатчика, а также прием указанных излучений, отраженных от блока эталонных отражателей 32, в фотоприемных блоках 13, 14 и в блоке 28. В результате сканирования блока эталонных отражателей 32 в блоке обработки оперативной информации 25 образуется информация о параметрах позиционирования пучков лазерного излучения на трех длинах волн и параметрах позиционирования СВЧ-излучения в собственных системах координат сканера ЛИ 10, дефлекторов ЛИ 4-6 и сканера приемо-передатчика 29 при приеме и регистрации сигналов, отраженных от блока эталонных отражателей 32. Указанная информация о позиционировании соответствует сигналам управления, поступающим на данные сканеры от блока управления и обработки информации 26, а также соответствует информации о состоянии позиционирования указанных сканеров в момент времени приема отраженных сигналов от блока 32 эталонных отражателей. Данная информация поступает от указанного блока 26 в блок 25 и информирующей блок 25 о состоянии позиционирования указанных сканеров в каждый конкретный момент времени. Здесь используется информация от датчиков углового положения сканеров, поступающая от каждого сканера в блок 26. Датчиками углового положения снабжен каждый сканер. Одновременно в блок 25 поступает информация от фотоприемных блоков 13, 14 о параметрах лазерного излучения, отраженного от блока эталонных отражателей 32, и параметрах соответствующих оптических сигналов, зарегистрированных отдельными фоточувствительными элементами блоков 13, 14. В блоке 25 осуществляется анализ этой информации, что позволяет определить, какому положению оси визирования сканера ЛИ 10 соответствует полное освещение блока эталонных отражателей 32 пучком сформированного ЛИ на трех длинах волн. Аналогично анализируется результат освещения блока 32 излучением СВЧ-диапазона от приемо-передатчика 27 при поступлении в блок 25 сигналов от блока управления и обработки сигналов приемо-передатчика 28 и от сканера приемо-передатчика 29 через блок управления и обработки информации 26. Одновременно с этим второй приемник 33 сигналов спутниковой глобальной навигационной системы формирует информацию об абсолютных координатах нахождения блока эталонных отражателей 32 относительно глобальной навигационной системы Земных координат и передает эту информацию по блокам связи 34, 31 в блок 25. Первый приемник сигналов спутниковой глобальной навигационной системы 30 получает и формирует информацию об абсолютных координатах нахождения собственно предлагаемой системы обнаружения относительно указанной глобальной навигационной системы координат и передает эту информацию также в блок 25. В блоке 25 при обработке указанных массивов информации устанавливается взаимное и однозначное соответствие между параметрами позиционирования в пространстве в области расположения блока 32 трех лазерных пучков на трех длинах волн, а также параметрами позиционирования СВЧ-излучения, и параметрами координат отдельных отражательных элементов в блоке 32, получаемых и регистрируемых первым и вторым фотоприемными блоками 13, 14 и приемо-передатчиком СВЧ-диапазона 27. Вначале фиксация указанного соответствия параметров позиционирования осуществляется в собственных системах координат фотоприемных блоков 13, 14, сканера ЛИ 10 и приемо-передатчика СВЧ-диапазона 27. В последнем позиционирование фиксируется по положению отражателя 35 приемо-передатчика радиодиапазона, устанавливаемого с помощью сканера 29 приемо-передатчика, сигналы о фиксации положения которого поступают от сканера 29 в блок 26 и далее в блок 25. При необходимости осуществляется подстройка положения оси визирования соответствующего лазерного пучка, формируемого одним из лазерных генераторов 1-3 с помощью соответствующего дефлектора ЛИ 4-6. Далее в блоке 25 вырабатывается (констатируется) решение о достижении факта совмещения трех лазерных пучков и, соответственно, трех осей визирования ЛИ в пределах области блока эталонных отражателей 32, а также факта совмещения пучка СВЧ-излучения от приемо-передатчика СВЧ-диапазона 27 и его оси визирования в области блока 32. После принятия этого решения полученные координаты и позиционные параметры комплексируются (объединяются) с абсолютными координатами блока эталонных отражателей 32 и координатами собственно системы обнаружения относительно глобальной навигационной системы координат, полученными с помощью приемников сигналов спутниковой глобальной навигационной системы 31, 34. В результате осуществляется привязка параметров позиционирования линий визирования сканера ЛИ 10 и приемо-передатчика СВЧ-диапазона 27 к системе координат глобальной навигационной системы координат Земли. При этом используются также такие дополнительные данные, как дальность от сканера ЛИ 10 до блока 32 эталонных отражателей, измеренная при приеме ЛИ, отраженного от блока 32, расстояние от сканера ЛИ 10 до приемо-передатчика СВЧ-диапазона 27 - параллакс источников ЛИ и излучения СВЧ-диапазона, расстояние (параллакс) между визирными осями фотоприемных блоков 13, 14 при их отражении от главного зеркала сканера ЛИ 10, а также расстояние между эталонными отражателями 43-46 в блоке эталонных отражателей 32, известные из конструкции последнего. Следует отметить, что в процессе определения координат отдельных эталонных отражателей, расположенных в блоке 32, в блоке обработки оперативной информации 25 определяется также величина крутизны пространственной характеристики сканирования визирных осей лазерных излучений на каждой длине волны при управлении перемещением ЛИ с помощью сканера ЛИ 10 и дефлекторов 4-6, а также аналогичная крутизна для сканера приемопередатчика 29. Данная крутизна определяется, например, величиной смещения визирной оси сканера ЛИ 10, под воздействием управляющих сигналов от блоков управления 11, 12, приводящей к перемещению пучка лазерного излучения с одного из отражателей поз.43 в блоке эталонных отражателей 32 на соседний эталонный отражатель поз.48 на фиг.1. Полученные результаты позиционирования визирных осей сканера ЛИ и сканера приемо-передатчика 29 СВЧ-диапазона, а также результаты измерения и тестирования величин крутизны характеристик сканирования позволяют с высокой точностью направлять совмещенный пучок лазерных излучений на трех длинах волн и излучения СВЧ-диапазона в любую точку (область) контролируемого объема пространства (в верхней полусфере), заданную в системе глобальных навигационных координат, что является преимуществом предложенной системы обнаружения объектов. Высокая точность позиционирования обусловлена тем, что привязка к глобальной навигационной системе координат осуществлена в двух точках, а именно: первая точка привязки задана координатами, представляемыми первым приемником сигналов спутниковой глобальной навигационной системы поз.30, расположенным собственно внутри системы обнаружения объектов. Вторая точка привязки задана координатами, представляемыми вторым приемником сигналов спутниковой глобальной навигационной системы поз.33, расположенным в блоке эталонных отражателей 32, который находится на достаточно большом расстоянии от собственно аппаратуры системы обнаружения - от сканера ЛИ 10, которое составляет, как было отмечено, порядка 100 метров. Величина этого расстояния, представляющего геометрическую измерительную базу, известна и измерена с высокой точностью при приеме сигналов ЛИ, отраженных от блока 32 (параметр дальности). При этом, как известно, две фиксированные точки в пространстве задают линию (прямую), определяющую масштаб и поле направлений в пространстве. Таким образом в предлагаемой системе обнаружения осуществлена привязка координат и поля направлений, создаваемых сканером ЛИ 10 и сканером приемо-передатчика 29, к системе координат глобальной навигационной системы и привязка к единому полю направлений указанной глобальной системы. При этом указанная геометрическая база, зафиксированная двумя точками, координаты которых определены в формате координат глобальной навигационной системы, используется далее как базовое направление в пространстве. Относительно этого направления осуществляется отсчет заданного направления в пространстве при позиционировании визирных осей сканера ЛИ 10 и сканера приемо-передатчика 29. Позиционирование в вертикальной плоскости осуществляют с помощью датчика вертикали - специального прибора типа гравитационного отвеса, входящего в состав сканера ЛИ 10 и сканера приемо-передатчика 29. Базовая вертикальная плоскость образована пересечением линии вертикали и указанной линии (прямой) базового направления. Базовая горизонтальная плоскость образуется плоскостью, перпендикулярной установленной базовой вертикальной плоскости. Таким образом, полученное базовое направление образует полярную систему координат в формате глобальной навигационной системы координат, в рамках которой осуществляется позиционирование визирных осей сканера ЛИ 10 и сканера приемо-передатчика 29 и определение пространственных координат обнаруженных объектов. На этом этап совмещения визирных осей лазерных излучений и излучения СВЧ-диапазона и привязки получаемых координат наблюдаемых объектов к координатам спутниковой глобальной навигационной системы завершен.
Далее продолжим рассмотрение отдельных аспектов работы предлагаемой системы обнаружения объектов по осуществлению сканирования КОП, определения координат обнаруженных объектов и выдачи этих координат потребителям в формате координат глобальной навигационной системы географических координат Земли. Как было отмечено, результаты позиционирования визирных осей сканера ЛИ 10, сканера приемопередатчика 29, а также определения крутизны характеристик позиционирования указанных сканеров, и фиксации поля направлений сканеров относительно поля направлений глобальной навигационной системы, позволяют осуществлять направление (нацеливание) визирных осей сканера ЛИ 10 и сканера приемо-передатчика 29 в любую точку (область) КОП, заданную в системе глобальных навигационных координат Земли. При этом осуществляется динамическое совмещение визирных осей и пучков лазерных излучений на трех длинах волн и СВЧ-излучения при их направлении в любую указанную заданную точку КОП при осуществлении сканирования КОП указанными видами излучений. Такое совмещение осуществляется на основе использования информации о дальности до предварительно обнаруженного объекта, которая измеряется на этапе предварительного обнаружения объекта при сканировании КОП, как это было отмечено выше. При этом в зависимости от величины дальности до предварительно обнаруженного объекта осуществляется небольшая подстройка визирных осей ЛИ в трех диапазонах длин волн с помощью высокоточных дефлекторов лазерных излучений 4-6. Аналогично осуществляется подстройка визирной оси приемо-передатчика СВЧ-диапазона 27. При этом используется информация о параллаксе между фотоприемными блоками 13, 14 и о параллаксе между сканером ЛИ 10 и отражателем 35 приемо-передатчика СВЧ-диапазона 27. Данная подстройка визирных осей сканера ЛИ 10 и сканера приемо-передатчика аналогична подстройке визирных осей указанных блоков на этапе тестирования и настройки предлагаемой системы обнаружения с помощью блока эталонных отражателей 32, расположенного на заданном известном расстоянии от сканера ЛИ 10 и сканера приемо-передатчика. Следует отметить, что размещение блока эталонных отражателей 32 на некотором небольшом расстоянии от сканера ЛИ 10 не приводит к затенению блоком 32 какого-либо участка в КОП вследствие большого различия в расстояниях от сканера ЛИ 10 до КОП и до блока 32. Кроме того, для предотвращения указанного затенения возможно установление блока эталонных отражателей 32 на специальной платформе, механически перемещаемой (поднимаемой) на этапе настройки системы обнаружения с использованием блока 32, и опускаемой вниз и обеспечивающей выведение блока 32 из зоны распространения лазерных излучений после этапа настройки в режиме штатного функционирования предлагаемой системы обнаружения. На фиг.1 указанная платформа не показана.
По материалам представленной заявки проведены научные исследования и модельный эксперимент по регистрации сигналов ЛИ, отраженных от объектов, облучаемых импульсным лазерным излучением. Используемые в эксперименте объекты (ОЭ приборы) обладали различными отражательными характеристиками. Осциллограммы электрических сигналов, полученных при приеме оптических сигналов от двух типов объектов на одной фиксированной длине волны представлены на фиг.2 и фиг.3. На фиг.2 представлен отраженный сигнал, имеющий две четко разделенных составляющих, свидетельствующих о наличии двух отражательных (бликующих) элементов в наблюдаемом объекте. Кроме того, каждый из отражательных элементов (сигналов) имеет четко фиксируемую тонкую структуру, характеризующую некоторые индивидуальные особенности каждого из отражательных элементов. На второй осциллограмме фиг.3 представлен отраженный сигнал, имеющий значительную протяженность по глубине и четко выраженную тонкую структуру, свидетельствующую о наличии целого ряда отражательных элементов, расположенных в глубине наблюдаемого объекта. При этом передний фронт зарегистрированного сигнала характеризует отражательные свойства типа слабо бликующей поверхности. Следует отметить, что представленные сигналы позволяют обеспечить надежное и эффективное обнаружение тест-объектов, а также обеспечивают эффективное различение и распознавание объектов по их классу принадлежности на основании анализа тонкой структуры сигналов. Характер тонкой структуры сигналов, отраженных от естественных объектов на местности - деревьев, элементов рельефа - имеет форму, существенно отличающуюся от формы осциллограмм, представленных на фиг.2 и фиг.3, что позволяет обеспечить эффективное обнаружение и распознавание оптических наблюдательных и ОЭ приборов на фоне естественного рельефа местности.
Отличительной особенностью предлагаемой системы обнаружения объектов, обеспечивающей положительный эффект и новые достигаемые результаты, является высокая информативность принимаемых и регистрируемых сигналов, отраженных от КОП при осуществлении сканирования КОП импульсно-периодическим ЛИ и СВЧ-излучением. Высокая информативность достигается за счет широкого диапазона длин волн облучающих КОП лазерных излучений, использования излучения СВЧ -диапазона, а также за счет приема и регистрации тонкой структуры отраженных сигналов. Для реализации высокой информативности используются ряд специальных средств, к которым относятся следующие элементы.
1. Используется блок эталонных отражателей 32, с помощью которого осуществляется настройка и тестирование аппаратуры системы обнаружения на начальном этапе работы, предварительное совмещение визирных осей сканера ЛИ 10 на трех длинах волн и сканера СВЧ-приемо-передатчика в пространстве предметов в пределах входной (картинной) плоскости блока эталонных отражателей 32. При этом результаты этого совмещения визирных осей используемых излучений, а также измерения параметров крутизны характеристик сканирования используются для точного совмещения визирных осей излучений при осуществлении сканирования КОП во всей верхней полусфере. Точное совмещение визирных осей в динамическом режиме сканирования обеспечивается за счет использования дефлекторов лазерного излучения 4-6.
2. В предлагаемой системе обнаружения объектов используются первый и второй динамические спектральные фильтры 21, 23, установленные перед объективами 19, 20 первого и второго фотоприемных блоков 13, 14 и решающие две важные задачи, необходимые для реализации указанной выше высокой информативности при приеме и регистрации сигналов ЛИ. Во-первых данные фильтры обеспечивают узкополосную спектральную фильтрацию принимаемых оптических сигналов - лазерных излучений - в спектральной полосе ЛИ, генерируемых лазерными генераторами 1-3. Во вторых обеспечивают защиту фотоприемных блоков 13, 14 от помехи обратного рассеивания, возникающей при подсвете КОП лазерным излучением от лазерных генераторов 1-3. Последнее обеспечивается тем, что пропускание динамических спектральных фильтров 21, 23 имеет место только при подаче на управляющие входы этих фильтров управляющего электрического сигнала определенной частоты от блоков управления 22, 24. При этом частота управляющего электрического сигнала (импульса) определяет длину волны узкой спектральной полосы пропускания динамических спектральных фильтров, а длительность данного управляющего импульса на управляющем входе спектральных фильтров 21, 23 определяет промежуток времени пропускания данным фильтром принимаемого оптического (лазерного) импульса излучения соответствующей длины волны и спектральной полосы, то есть длительность стробирования по времени входного принимаемого оптического излучения. Таким образом, динамические спектральные фильтры наряду с функцией узкополосной спектральной фильтрации обладают функцией временного стробирования пропускаемого сигнала ЛИ. В моменты времени отсутствия управляющих электрических импульсов на управляющих входах динамических спектральных фильтров данные фильтры обеспечивают оптическую изоляцию оптических входов фотоприемных блоков 13, 14 от входных принимаемых сигналов обратного рассеивания, возникающих при отражении зондирующих лазерных излучений от участков атмосферы, примыкающих к сканеру ЛИ 10. При этом динамические спектральные фильтры обеспечивают надежную оптическую изоляцию и необходимое ослабление оптических сигналов обратного рассеивания, что позволяет реализовать высокую чувствительность и разрешающую способность по времени в фотоприемных блоках 13, 14 и предотвращает влияние сигналов обратного рассеивания на характеристики фотоприемных блоков. Этим обеспечивается возможность регистрации тонкой временной структуры принимаемых оптических сигналов лазерного излучения, отраженного от КОП в видимом и ИК диапазонах, что обуславливает увеличение эффективности обнаружения объектов.
Наличие возможности оперативного управления длиной волны спектрального пропускания в динамических спектральных фильтрах 21, 23 обуславливает еще одну возможность повышения информативности принимаемых и регистрируемых лазерных излучений, отраженных от КОП. Данная возможность связана с возможностью изменения длины волны ЛИ, генерируемых лазерными генераторами 1-3, при облучении КОП сканируемым лазерным излучением. При использовании спектральной перестройки длин волн генерации ЛИ в лазерных генераторах 1-3 обеспечивается облучение КОП лазерными излучениями на различных длинах волн в некотором широком диапазоне перестройки в видимом диапазоне и в диапазоне ИК-излучения. Этим обеспечивается определение и анализ отражательных характеристик объектов в КОП в широком спектральном диапазоне видимых и ИК длин волн и, соответственно, повышение информативности принимаемых и регистрируемых оптических сигналов ЛИ, отраженных от объектов в КОП, что обуславливает повышение эффективности обнаружения и вероятности распознавания широкого класса объектов, находящихся на контролируемой или охраняемой местности, в особенности при отсутствии бликовой ситуации при наблюдении объектов. Для реализации указанной возможности в предлагаемой системе используются лазерные генераторы с перестройкой длины волны, которые в настоящее время выпускаются промышленностью. Изменение длины волны генерации ЛИ осуществляется под воздействием управляющих сигналов, поступающих от формирователя управляющих импульсов 37, представляющего собой комплексный блок управления параметрами излучения лазерных генераторов 1-3. Одновременно с изменением длины волны ЛИ, генерируемого лазерными генераторами, осуществляется сопряженное с этим изменение длины волны полосы спектрального пропускания динамических спектральных фильтров 21, 23 под действием управляющих сигналов от блоков управления 22, 24. Предварительная настройка и сопряжение длин волн генерации лазерных излучений в лазерных генераторах 1-3 и длин волн полос спектрального пропускания в динамических спектральных фильтрах 21, 23 осуществляется на этапе предварительной настройки и совмещения визирных осей ЛИ при использовании блока эталонных отражателей 32.
В предлагаемой системе обнаружения объектов использованы блоки и узлы, освоенные современной промышленностью.
Первый и второй динамические спектральные фильтры 21, 23 реализованы на основе акустооптических перестраиваемых фильтров, работающих в видимом (поз.21) и инфракрасном (поз.23) диапазоне длин волн. Перестраиваемый акустооптический фильтр представляет собой современную разработку в области оптоэлектроники и акустической техники, реализованную на базе акустооптической ячейки, состоящей из кристалла оптически прозрачного для используемой длины волны видимого или ИК-диапазона и пьезоэлемента, возбуждающего в этом кристалле ультразвуковые волны. При распространении оптического сигнала ЛИ через кристалл происходит его взаимодействие с динамической фазовой структурой, возбужденной в этом кристалле посредством ультразвуковых волн. В результате этого происходит изменение условий распространения оптического сигнала через данный кристалл для определенной узкой спектральной полосы оптического сигнала (ЛИ). На основе этого физического эффекта промышленностью разработаны перестраиваемые акустооптические фильтры, работающие в видимом и ИК-диапазонах длин волн, обеспечивающие выделение (пропускание) узкой спектральной полосы из принимаемого оптического сигнала лазерного излучения. Принцип действия и основные характеристики указанных акустооптических фильтров изложены в монографии [4], стр.219-234, и в многочисленных публикациях [5]. Данные фильтры реализованы на основе кристаллов ниобата лития, кварца, парателлурита, обладают высокой эффективностью, высокой разрешающей способностью и возможностью работы в широком угловом поле зрения. Перестройка узкой спектральной полосы пропускания фильтров реализуется с высоким быстродействием в динамическом режиме. Как было указано выше данные перестраиваемые фильтры обладают возможностью выполнения ряда дополнительных задач, а именно: обеспечивают защиту фотоприемных блоков от помехи обратного рассеивания, что обусловлено отсутствием распространения оптического сигнала через кристалл в направлении оптического выхода при отсутствии возбуждающей кристалл ультразвуковой волны. Этим эффектом реализуется работа акустооптической ячейки в качестве стробирующего оптического затвора для проходящего лазерного излучения. Возможность работы динамических спектральных фильтров в широком угловом поле зрения обеспечивает передачу через указанные фильтры значительного спектра пространственных частот, определяющих фильтрацию высокоинформативных изображений и соответствующего участка (области) наблюдаемой местности.
В качестве лазерных генераторов можно использовать широкий класс генераторов, обеспечивающих генерацию коротких импульсно-периодических лазерных излучений (импульсов ЛИ) во всем диапазоне видимых длин волн, а также в ближнем и среднем ИК-диапазонах длин волн. Имеются также лазерные генераторы с перестройкой длины волны генерации в указанных диапазонах длин волн, выполненные на основе различных физических принципов [6]. Дефлекторы лазерных излучений выполнены на основе акустооптических отклоняющих ячеек, так называемых сканаторов лазерного излучения, которые обладают большим быстродействием и серийно выпускаются промышленностью. Описание принципов работы дефлекторов и их характеристики приведены в монографии [4] на стр.134-167. Сканер ЛИ 10 выполнен на основе механических отклоняющих устройств, использующих шаговые электрические двигатели, управляемые программно от блоков управления - специализированных цифровых управляющих средств. Фотоприемные блоки видимого и ИК-диапазонов выполнены на основе современных матричных фоточувствительных приемников с параллельным съемом информации, например, матричных ФЭУ, интегральных фотодиодных матриц, освоенных промышленностью и имеющих высокое быстродействие и чувствительность в видимом и ближнем ИК-диапазоне длин волн. Многоканальные усилители и многоканальные блоки памяти выполнены на основе современных схем усиления и регистрации сигналов, обеспечивающих параллельный съем информации с выходов фотоприемных матриц - многоэлементных фоточувствительных приемников видимого и ИК-диапазонов, - а также обеспечивающих оцифровку, запоминание и ввод этой информации в цифровой форме в блок обработки оперативной информации 25. Последний представляет собой современный высокопроизводительный компьютер, функционально связанный с несколькими источниками информации посредством соответствующих интерфейсов. Блок управления и обработки информации представляет собой высокопроизводительный компьютер, обеспечивающий управление всеми блоками системы, содержащий также средства отображения информации (дисплей), средства связи и передачи информации различным потребителям, например, в территориальный центр контроля и анализа ситуаций. Приемники сигналов спутниковой глобальной навигационной системы представляют собой выпускаемые промышленностью малогабаритные устройства, обеспечивающие непрерывный прием радиосигналов от группировки спутниковой глобальной навигационной системы (например, системы Глонасс) и выдачу информации о своем местоположении на земной поверхности в системе глобальных координат с высокой степенью точности, достигающей в настоящее время от единиц метров до десятков сантиметров. Приемо-передатчик СВЧ-диапазона реализован на основе передатчика и приемника миллиметровых длин волн, которые конструктивно установлены в блоке 28 управления и обработки сигналов приемо-передатчика. Отражатель приемо-передатчика СВЧ-диапазона 35 конструктивно связан со сканером приемо-передатчика 29, обеспечивающем изменение в пространстве визирной оси отражателя 35 приемо-передатчика СВЧ-диапазона в горизонтальной и вертикальной плоскостях сканирования. Возможно также использование систем активных антенных решеток для осуществления сканирования излучения СВЧ-диапазона. Блоки связи представляют собой стандартные средства радиосвязи с цифровой передачей информации. Формирователи лазерных пучков 7, 8, 9 выполнены на основе стандартных оптических элементов - линз. При этом возможна установка формирователей лазерных пучков 7, 8, 9 непосредственно на выходах лазерных генераторов 1-3 в зависимости от требований к параметрам диапазона углов сканирования ЛИ. Оптические связи на фиг.1 между лазерными генераторами 1-3, дефлекторами ЛИ 4-6 и формирователями лазерных пучков 7-9 условно показаны с пунктирными линиями, что отражает наличие светонепроницаемых кожухов, обеспечивающих защиту от рассеиваемого лазерного излучения от лазерных генераторов высокочувствительных фотоприемных блоков 13, 14, расположенных рядом. Блок эталонных отражателей 32 представляет собой специальную конструкцию, в которой установлены отражатели лазерных излучений и отражатели СВЧ- диапазона миллиметровых длин волн, выпускаемые промышленностью.
Предложенная система обнаружения объектов за счет использования для зондирования контролируемой области пространства лазерных излучений в широком диапазоне излучений одновременно на трех длинах волн, а также излучения в СВЧ-диапазоне обеспечивает существенное увеличение информативности процесса обнаружения и распознавания объектов. Это позволяет реализовать решение следующих задач и получить следующие результаты.
Обеспечивает повышение эффективности обнаружения объектов в естественных полевых условиях и при отсутствии бликовой ситуации.
Обеспечивает увеличение вероятности правильного обнаружения и распознавания широкого класса объектов - от различных типов оптических и оптикоэлектронных приборов до различного рода специальных объектов, замаскированных на местности, например, средств передвижения, средств противодействия и т.п.
Обеспечивает увеличение точности определения координат обнаруженных объектов на местности в формате глобальной навигационной системы земных координат. Реализует обеспечение точного наведения визирной оси предложенной системы в заданную точку (область) контролируемой местности для контроля и наблюдения ситуации в данной области пространства с помощью предлагаемой системы обнаружения, что важно для организации эффективной охраны указанной местности.
Обеспечивает эффективный контроль состояния движения различных транспортных средств на аэродромах, речных и морских портах и других ответственных зонах и объектах народного хозяйства.
Следует отметить возможность использования предложенной системы обнаружения для работы в условиях плохой видимости в сложных метеорологических условиях - при наличии атмосферных осадков, тумана и т.п. - когда лазерные средства оптического видимого и ИК-диапазонов длин волн малоэффективны. В этом случае входящий в систему обнаружения приемо-передатчик СВЧ-диапазона 27 сохраняет свою работоспособность в сложных метеоусловиях и способен осуществлять контроль ситуации на местности в своем диапазоне длин волн. При этом важной особенностью предложенной системы является осуществление совмещения оптического изображения местности - КОП- с радиолокационным изображением этой местности, реализуемым в результате работы данной системы обнаружения объектов.
Указанные результаты реализованы в предложенной системе за счет использования ряда современных специальных технических средств: за счет использования многоэлементных фотоприемных блоков, обладающих чувствительностью в указанных диапазонах длин волн и высокой временной разрешающей способностью, лазерных генераторов с перестройкой длины волны генерации в видимом и ИК-диапазонах а также современных высокопроизводительных средств вычислительной техники и многоканальных средств запоминания оперативной информации. Важную задачу в предложенной системе решают средства совмещения в пространстве визирных осей лазерных пучков и излучения СВЧ-диапазона, к которым следует отнести быстродействующие дефлекторы ЛИ, сканер ЛИ и сканер СВЧ-диапазона, блок эталонных отражателей. Высокую эффективность работы системы обнаружения обеспечивают также блоки динамической фильтрации, приемники сигналов спутниковой глобальной навигационной системы.
Источники информации
[1] Патент РФ №2277254 от 24.12.2003 г.
[2] Патент РФ №2278399 от 16.06.2004 г.
[3] Патент РФ №2113717 от 20.06.1998 г.(Прототип).
[4] Балакший В.И., Парыгин В.Н., Чирков Л.Е. Физические основы акустооптики. - М.: Радио и связь, 1985 (стр.219-234); (стр.134-167).
[5] Балакший В.И., Манкевич С.К., Парыгин В.Н. и др. Квантовая электроника, т.12, №4, 1985 г., стр.743-748.
[6] Справочник по лазерной технике под ред. Напартовича А.П., М. Энергоиздат 1991 г.
[7] Патент РФ №2152056 от 23.06.1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2529758C1 |
| ЛАЗЕРНАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2544305C1 |
| СИСТЕМА ЛАЗЕРНОЙ ЛОКАЦИИ | 2013 |
|
RU2540451C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2524450C1 |
| ЛАЗЕРНЫЙ ЛОКАТОР | 2014 |
|
RU2575766C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТИКО-ЭЛЕКТРОННЫХ ПРИБОРОВ | 2013 |
|
RU2540154C2 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |


Изобретение относится к лазерной локации и может быть использовано для обнаружения оптических и оптоэлектронных приборов наблюдения, расположенных и замаскированных на местности, а также для обнаружения различных объектов, например, транспортных средств, предметов вооружения, специальной аппаратуры. Система обнаружения содержит лазерные генераторы на нескольких длинах волн генерации, дефлекторы лазерного излучения, динамические спектральные фильтры, фотоприемные блоки, приемо-передатчик СВЧ-диапазона, блок эталонных отражателей и приемники сигналов спутниковой глобальной навигационной системы. Технический результат - повышение эффективности обнаружения и вероятности правильного обнаружения и распознавания оптических и оптоэлектронных приборов и средств наблюдения при отсутствии бликов отраженных сигналов, повышение точности определения координат обнаруженных объектов и привязки их координат к глобальной навигационной системе координат. 5 з.п. ф-лы, 3 ил.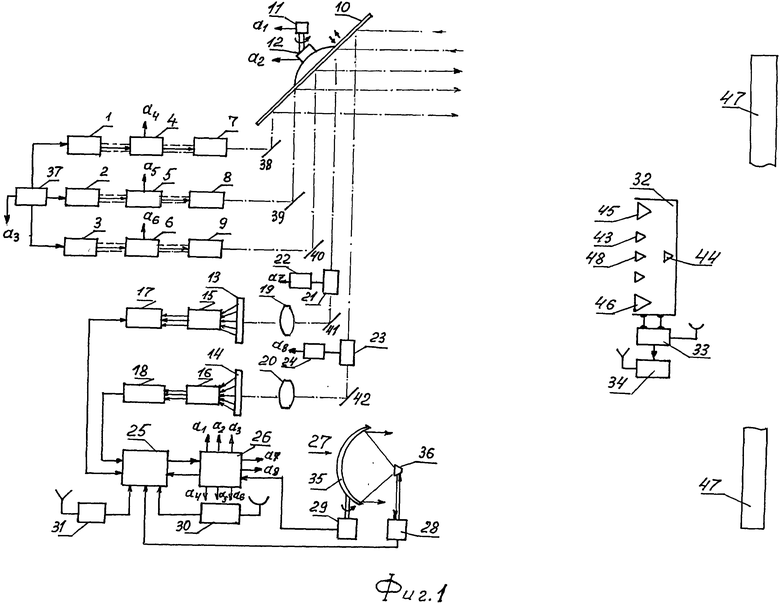
1. Система обнаружения объектов, содержащая последовательно установленные на первой оптической оси, оптически связанные первый лазерный генератор, формирователь лазерного пучка, отражательное зеркало, сканер лазерного излучения, первый и второй блоки управления сканером, установленные на четвертой оптической оси первый фотоприемный блок, оптически связанный с первым объективом, оптический вход которого посредством отражательного зеркала связан со сканером лазерного излучения, формирователь управляющих импульсов, выход которого подключен к управляющему входу первого лазерного генератора, блок управления и обработки информации, выходы которого подключены к формирователю управляющих импульсов, первому и второму блокам управления сканером, отличающаяся тем, что в нее введены первый дефлектор лазерного излучения, установленный на первой оптической оси между оптическим выходом первого лазерного генератора и оптическим входом первого формирователя лазерного пучка, установленные на второй оптической оси оптически связанные второй генератор лазерного излучения, второй дефлектор лазерного излучения, второй формирователь лазерного пучка, выход которого посредством отражательного зеркала связан со сканером лазерного излучения, установленные на третьей оптической оси оптически связанные третий генератор лазерного излучения, третий дефлектор лазерного излучения и третий формирователь лазерного пучка, выход которого посредством отражательного зеркала связан со сканером лазерного излучения, установленные на пятой оптической оси оптически связанные второй фотоприемный блок и второй объектив, оптический вход которого посредством отражательного зеркала связан со сканером лазерного излучения, приемо-передатчик СВЧ-диапазона, снабженный сканером, подсоединенный своим выходом к блоку обработки сигналов приемопередатчика, электрически связанные первый многоканальный усилитель и первый многоканальный блок памяти, электрически связанные второй многоканальный усилитель и второй многоканальный блок памяти, блок обработки оперативной информации, первый и второй приемники сигналов спутниковой глобальной навигационной системы, первый и второй блоки связи, блок эталонных отражателей, первый блок динамической спектральной фильтрации с блоком управления, установленный на четвертой оптической оси перед первым объективом, второй блок динамической спектральной фильтрации с блоком управления, установленный на пятой оптической оси перед вторым объективом, при этом выходы первого и второго фотоприемных блоков подключены соответственно к первому и второму многоканальным усилителям, выходы первого и второго многоканальных блоков памяти подсоединены ко входам блока обработки оперативной информации, выходы первого приемника сигналов спутниковой глобальной навигационной системы и первого блока связи подключены к блоку обработки оперативной информации, выход блока обработки сигналов приемо-передатчика СВЧ-диапазона подключен к блоку обработки оперативной информации, выход которого подключен к блоку управления и обработки информации, управляющие входы второго и третьего лазерных генераторов подключены к формирователю управляющих импульсов, вход которого подключен к выходу блока управления и обработки информации, управляющие входы первого, второго и третьего дефлекторов лазерного излучения подключены к блоку управления и обработки информации, управляющий вход сканера приемо-передатчика СВЧ-диапазона подсоединен к блоку управления и обработки информации, управляющие входы первого и второго фотоприемных блоков, первого и второго блоков динамической спектральной фильтрации подключены к блоку управления и обработки информации, выход второго приемника сигналов спутниковой глобальной навигационной системы подключен ко второму блоку связи.
2. Система по п.1, отличающаяся тем, что в ней первый и второй фотоприемные блоки выполнены на основе многоэлементных двумерных фотоприемных матриц видимого и инфракрасного диапазонов длин волн.
3. Система по п.1, отличающаяся тем, что в ней блок эталонных отражателей выполнен на основе совместно расположенных уголковых отражателей оптического видимого диапазона длин волн, ИК-диапазона длин волн и СВЧ-диапазона длин волн.
4. Система по п.1, отличающаяся тем, что в ней блок эталонных отражателей, второй приемник сигналов спутниковой глобальной навигационной системы и второй блок связи расположены совместно и конструктивно объединены.
5. Система по п.1, отличающаяся тем, что в ней первый и второй динамические спектральные фильтры выполнены на основе акустооптической ячейки, в которой под воздействием блока управления возбуждены ультразвуковые волны, взаимодействующие с принимаемым лазерным излучением.
6. Система по п.1, отличающаяся тем, что в ней в качестве лазерных генераторов видимого диапазона длин волн и инфракрасного диапазона длин волн использованы лазерные генераторы с перестройкой длин волн генерации в указанных диапазонах.
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| СПОСОБ ЛАЗЕРНОЙ ЛОКАЦИИ И ЛАЗЕРНОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2183841C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| JP 2007126025 A, 24.05.2007 | |||

