Изобретение относится к области судостроения, в частности к движителям с вертикальной осью и поперечным расположением относительно потока, с постоянной управляемой ориентацией лопастей.
Существующие движительные комплексы подводных аппаратов представляют собой многомоторные схемы. На необитаемых подводных аппаратах, как правило, не устанавливают рулевые поверхности для осуществления маневров, а управление производится тягой движителей. Движители, таким образом, выполняют тягово-маневровую работу. Этим обусловлено применение большого числа (от 6 шт. и более) гребных винтов, размещенных, определенным образом, в корпусе подводного аппарата, для обеспечения маневренности. Большое число движителей усложняет компоновку подводных аппаратов, усложняет размещение рабочего оборудования. Гребные винты устанавливаются, как правило, под некоторым углом (обычно 45°) к диаметральной плоскости подводного аппарата в целях использования тяги отдельного движителя при перемещениях во взаимно перпендикулярных направлениях. Это приводит, однако, к значительному снижению эффективности движительного комплекса, т.к. вектор тяги движителя не совпадает с курсом подводного аппарата. Кроме того, общая мощность движительного комплекса дробится по числу отдельных движителей, что не позволяет сконцентрировать в заданном направлении всю мощность аппарата. Движители устанавливаются на крайних точках габарита подводного аппарата, что приводит к их повышенной уязвимости от встречи с подводными препятствиями.
Целью изобретения является обеспечение высокой маневренности подводных аппаратов, т.е. возможности поступательного движения по всем трем осям, а также вращения вокруг всех трех осей, сочетая высокую удельную мощность в одном агрегате, защищенность от внешних воздействий и компактность.
Известно большое количество вариантов реализации движителей с вертикальной ориентацией оси вращения (например, патенты DE 453823 C, DE 413896 C, ЕР 0795466, ЕР 1964774, RU 2179521).
Общими признаками всех подобных движителей являются: наличие вращающегося вокруг вертикальной оси основания (ротора), множество вертикально расположенных лопастей, расположенных по периферии основания и вращающихся вокруг вертикальной оси совместно с основанием. Каждая лопасть в процессе своего вращения совершает колебательные движения относительно своей нейтральной плоскости, совпадающей с касательной плоскостью к цилиндрической поверхности, образованной вращением осей поворота лопастей. Механизмы, инициирующие колебательные движения лопастей, реализованы либо в виде электромеханических устройств, действующих на каждую лопасть индивидуально, либо в виде рычажной системы, связывающей все лопасти между собой. В указанных механизмах не решен вопрос реализации оптимального закона колебания лопастей в зависимости от угла поворота основания, ввиду чего падает эффективность движителя, а также растут нагрузки в шарнирных сочленениях.
Наиболее близким по своей технической сути устройством, принимаемым в качестве ближайшего аналога (прототипа), является конструкция судового крыльчатого движителя, предложенная авторами патента US 2291062 A. В этой конструкции множество лопастей, закрепленных вертикально по периметру основания, удерживаются и вращаются совместно с основанием так, что оси этих лопастей в процессе вращения основания вокруг вертикальной оси, описывают цилиндр. В этой конструкции поворот лопастей осуществляется в зависимости от угла поворота основания, посредством рычажного механизма, расположенного в центре устройства и связанного тягами с каждой лопастью. Рычажный механизм обеспечивает поворот лопастей так, что в каждый момент времени все перпендикуляры, проведенные к хордам лопастей, сходятся в одной точке - точке управления. Перемещение вышеуказанной точки управления вдоль диаметра вращающегося основания устанавливает мгновенный угол атаки каждой лопасти так, что на ее поверхности возникает гидродинамический упор в заданном направлении. Гидродинамический упор движителя и перемещение в потоке (направление потока) возникает в направлении, поперечном вертикальной оси движителя. В данном устройстве применен многозвенный рычажный механизм, осуществляющий поворот лопастей в процессе вращения основания по оптимальному закону колебания лопастей, обеспечивающий высокую гидродинамическую эффективность движителя. Недостатком конструкции является центральное расположение управляющего механизма, занимающее весь центральный объем движителя.
Недостатком данного известного устройства является также то, что он, будучи смонтирован на подводном аппарате, обеспечивает движение только вдоль горизонтальной плоскости. Перемещение вдоль вертикальной оси, а также вращение вокруг всех трех осей (по дифференту, по крену и по курсу) такой движитель не обеспечивает.
Существенным общим признаком ближайшего аналога, с точки зрения заявляемого изобретения, является наличие множества лопастей аэродинамического профиля, вращающихся вокруг вертикальной оси, поперечно потоку, и удерживаемых ротором для крепления лопастей.
Задачами предлагаемого заявителем устройства, решение которых не содержится в конструкции ближайшего аналога, являются:
- реализация перемещения подводного аппарата вдоль вертикальной оси;
- реализация вращения подводного аппарата вокруг трех осей.
Для решения поставленных задач заявителем предлагается комбинированный крыльчатый движитель подводных аппаратов.
Существенными признаками, отличающими заявляемое устройство от прототипа, являются:
- устройство собрано на общем шасси из двух одинаковых крыльчатых движителей соосно один другому и развернутых опорными поверхностями оснований друг к другу;
- дополнительно в центре крыльчатых движителей введены гребные винты изменяемого шага;
- поворот лопастей осуществляется не тягами центрального рычажного механизма, а посредством внешнего кольца управления, представляющего собой две концентрические цилиндрические поверхности, между которыми свободно движется ролик, установленный, в свою очередь, на рычаге, жестко закрепленном на оси поворота лопасти.
Таким образом, устройство представляет собой спаренную движительную установку, состоящую из двух крыльчатых движителей, оснащенных гребными винтами изменяемого шага, размещенных соосно на общем шасси.
Техническим результатом предлагаемого устройства является расширение динамических и маневренных возможностей подводных аппаратов за счет элемента, создающего тягу вдоль вертикальной оси, реализации вращения вокруг всех трех осей путем применения спаренной установки, а также концентрации в едином устройстве полной мощности энергетической установки.
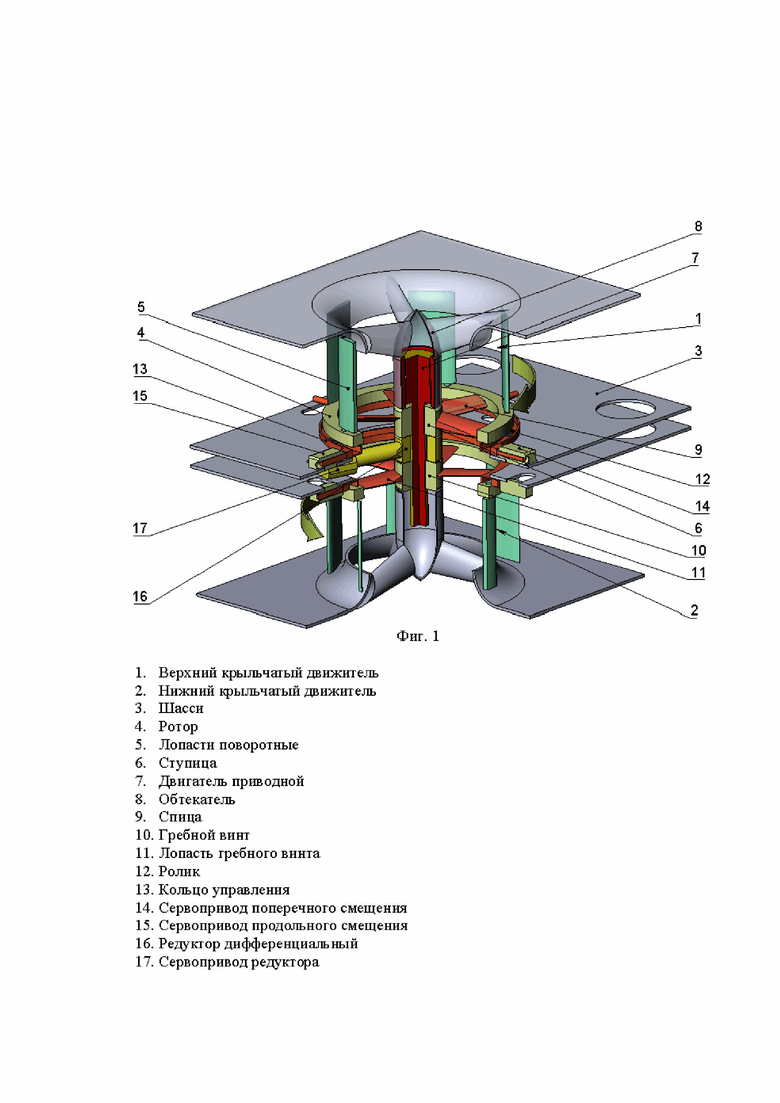
На фиг. 1 показан общий вид движителя.
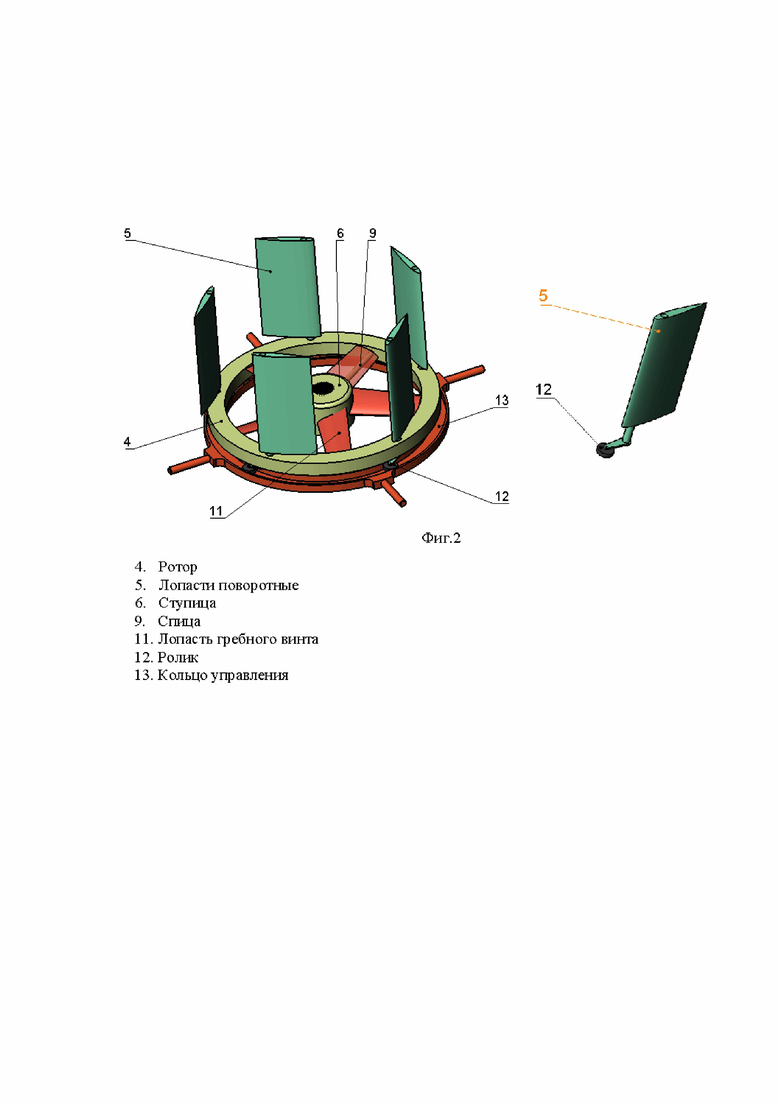
На фиг. 2 показан отдельно крыльчатый движитель.
Комбинированный крыльчатый движитель (фиг. 1) представляет собой спаренную установку из двух одинаковых крыльчатых движителей: верхнего 1 и нижнего 2, собранных соосно и симметрично относительно плоскости, перпендикулярной их оси вращения, на едином шасси 3. Конструкция каждого крыльчатого движителя состоит из ротора 4, на котором смонтированы поворотные лопасти 5. Ротор 4 своей ступицей 6 посажен на валу приводного двигателя 7, расположенного в обтекателе 8. Ступица 6 механически связана с ободом ротора 4 посредством радиальных спиц 9. Ступица 6 ротора 4 одновременно является ступицей гребного винта 10, лопасти 11 которого имеют возможность поворачиваться на спицах 9. На лопастях 5, представляющих собой крыло аэродинамического профиля, выполнены поворотные оси, на которых закреплены элементы управления - рычаги с роликом 12. Кольцо управления 13 представляет кольцо с концентрическими цилиндрическими поверхностями (желобом) по ведущим пояскам которых свободно катится ролик 12. Кольцо управления 13 не вращается, но может перемещаться, посредством сервоприводов поперечного 14 и продольного 15 смещения, на плоскости, поперечной оси вращения, в любом направлении относительно центра вращающегося ротора 4, в пределах конструктивно заданного эксцентриситета. Вращение ротора нижнего крыльчатого движителя осуществляется через дифференциальный редуктор 16, который представляет собой дифференциальный механизм суммирующего типа, обеспечивающий разнонаправленное вращение верхнего 1 и нижнего 2 крыльчатых движителей. Сервопривод 17 дифференциального редуктора 16 регулирует разность частот вращения верхнего и нижнего крыльчатого движителя.
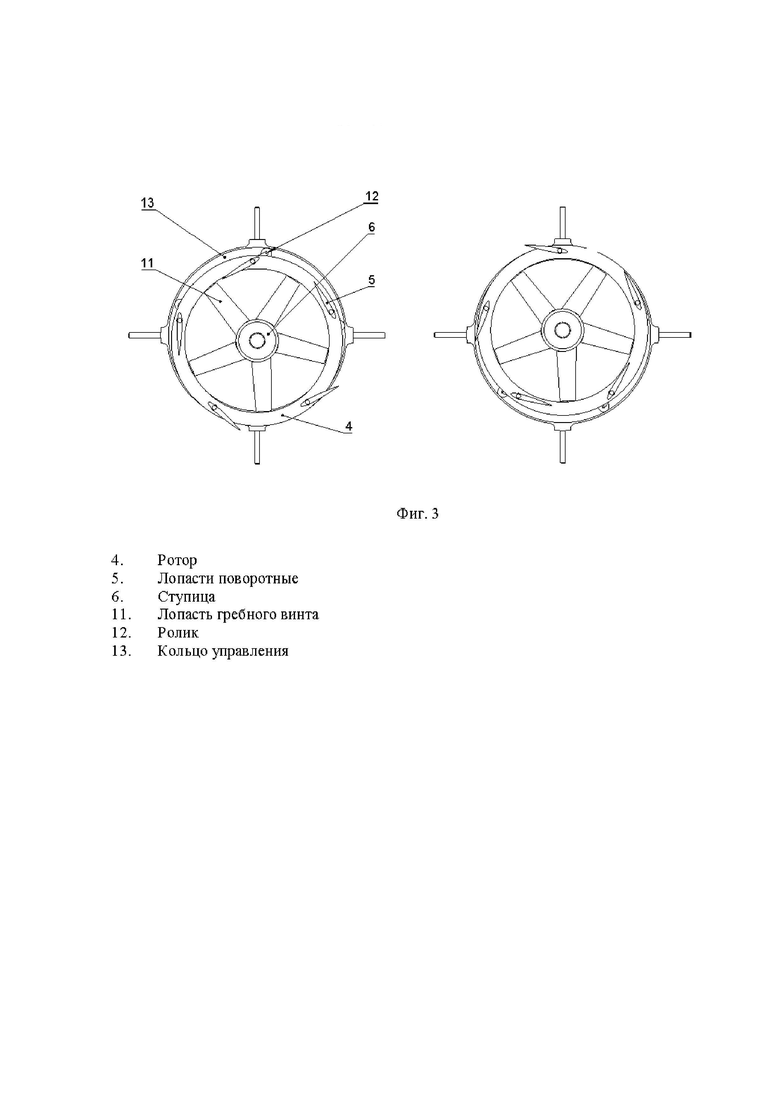
На фиг. 3 показан принцип управления тягой движителя. Комбинированный крыльчатый движитель работает следующим образом.
Двигатель привода 7 через дифференциальный редуктор 16 вращает ротор 4 верхнего крыльчатого движителя 1 в одну сторону (по часовой стрелке на фиг. 1), а ротор нижнего крыльчатого движителя 2 в другую сторону (против часовой стрелки на фиг. 1) Вращающийся ротор увлекает за собой установленные на нем лопасти 5. Лопасти 5, следуя закрепленными на них роликами 12 по ведущим пояскам неподвижного кольца управления 13, поворачиваются на определенный угол атаки относительно своего нейтрального положения. При совмещении центра управляющего кольца 13 с осью вращения ротора 4, все лопасти крыльчатого движителя выставлены в нейтральную позицию так, что продольная плоскость каждой лопасти, совпадает с касательной плоскостью к цилиндрической поверхности, образованной вращающимися осями лопастей. При этом угол атаки лопасти равен нулю и гидродинамический упор на поверхностях лопастей не возникает.
При смещении кольца управления 13 относительно центра вращающегося ротора, посредством сервоприводов 14 и (или) 15, лопасти 5, ведомые роликами 12 по пояскам кольца управления, поворачиваются на некоторый угол атаки так, что их движение, совместно с вращающимся ротором, в водной среде, приводит к возникновению на их поверхностях гидродинамической силы. Зависимость угла порота каждой лопасти от угла поворота ротора такова, что в любой момент времени лопасть создает гидродинамический упор в заданном направлении. Сумма упора всех лопастей обеспечивает возникновение общей силы тяги, приложенной к оси вращения движителя.
Лопасти 11 центральных гребных винтов имеют возможность синхронно поворачиваться относительно своих осей на некоторый угол, т.н. угол атаки. При этом их поворот на определенный угол атаки приводит к возникновению гидродинамического упора в вертикальном направлении. Что обеспечивает как всплытие при положительных углах атаки, так и погружение при отрицательных углах атаки.
Кольца управления 13 верхнего 1 и нижнего 2 крыльчатого движителя могут перемещаться независимо друг от друга, поэтому сила тяги верхнего и нижнего крыльчатого движителя могут различаться как по величине, так и по направлению. Так, при одинаковом смещении обоих колец 13, возникнет равная по величине и направлению сила тяги, сложенная из значений тяги верхнего и нижнего крыльчатого движителя, что приведет к перемещению аппарата в заданном направлении.
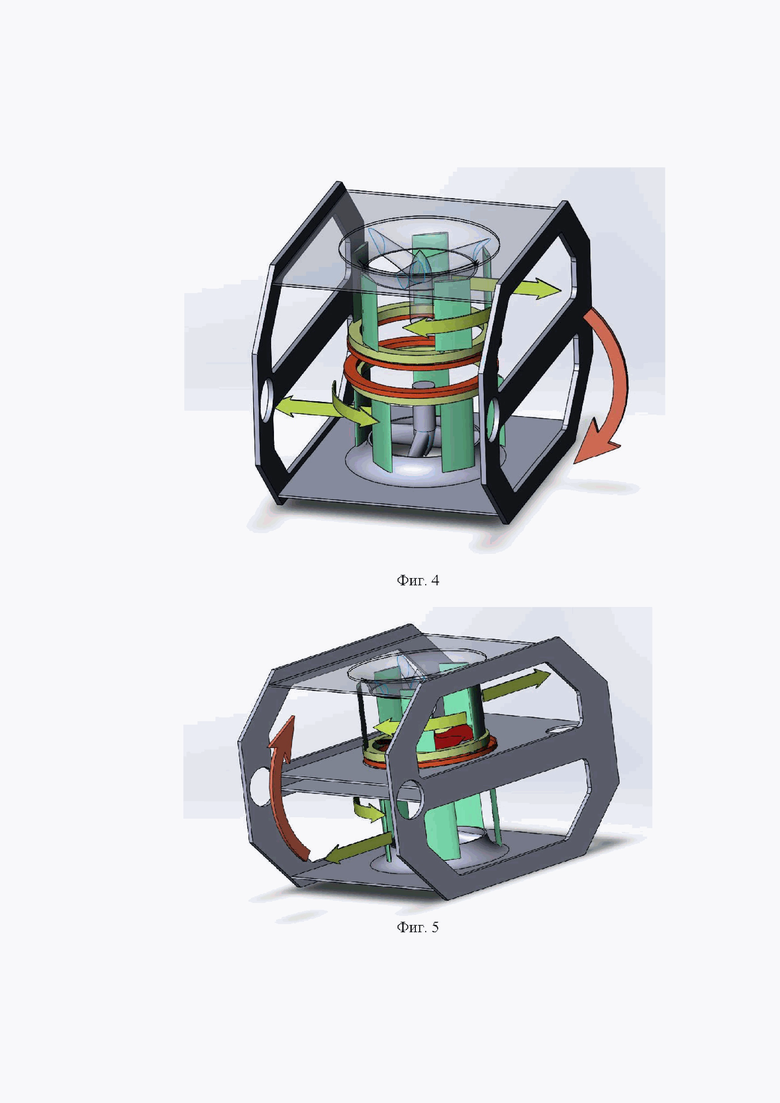
При смещении управляющих колец 13 верхнего и нижнего движителя в разных направлениях, на верхнем и нижнем крыльчатом движителе возникает разный по величине и направлению упор, что приводит к возникновению пары сил, и, соответственно, к вращению аппарата в заданной вертикальной плоскости. При появлении пары сил на поперечной плоскости возникнет вращение аппарата вдоль продольной оси, т.е. по крену (фиг. 4). А при появлении пары сил в продольной плоскости, возникнет вращение аппарата вдоль поперечной оси, т.е. по дифференту (фиг. 5).
Разнонаправленное вращение верхней и нижней частей движителя обеспечивает взаимную компенсацию реактивных моментов, возникающих от создающих тягу крыльчатых движителей. Благодаря этому аппарат устойчив на заданном курсе.
При разности частот вращения нижнего и верхнего движителя, их реактивный момент будет иметь разную величину, причем эта величина может быть, как положительной, так и отрицательной. Разность реактивных моментов верхней и нижней частей вызывает результирующий реактивный момент, который приводит к вращению аппарата вокруг вертикальной оси, т.е. осуществляется управление по курсу.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОРУЛЕВАЯ КОЛОНКА С ЭЛЕКТРОДВИЖИТЕЛЕМ | 2024 |
|
RU2834489C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| Крыльчатый двигатель | 2020 |
|
RU2743564C1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| ЛОПАСТНОЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 2007 |
|
RU2362706C2 |
| СПОСОБ РАБОТЫ БЕЗВИХРЕВОГО ГРЕБНОГО ВИНТА И УСТРОЙСТВО ДВИЖИТЕЛЯ ДЛЯ ЖИДКИХ СРЕД НА ЕГО ОСНОВЕ | 2015 |
|
RU2614444C2 |
| Способ работы крыльчатого движителя и устройство для его осуществления | 2019 |
|
RU2720699C1 |
Изобретение относится к области судостроения, а именно к движителям с вертикальной осью и поперечным расположением относительно потока с постоянной управляемой ориентацией лопастей. Комбинированный крыльчатый движитель подводных аппаратов с вертикальной осью и поперечным расположением относительно потока содержит ротор, который приводится в движение приводным двигателем, на роторе закреплены множество лопастей аэродинамического профиля, вращающихся совместно с ним вокруг вертикальной оси с постоянной управляемой по оптимальному закону ориентацией. Движитель является спаренным и состоит из двух одинаковых крыльчатых движителей – верхнего и нижнего. В центре крыльчатых движителей дополнительно размещены гребные винты изменяемого шага. Роторы каждого движителя приводятся во вращение посредством приводного двигателя через дифференциальный редуктор, на выходных валах которого посажены ступицы ротора, а ступицы в свою очередь механически связаны с ободами роторов посредством радиальных спиц, являющихся осями поворота лопастей гребного винта. Дополнительно введены кольца управления, представляющие собой кольцо с желобом в виде концентрических цилиндрических поверхностей, по ведущим пояскам которых свободно катятся элементы управления – ролики рычагов, зафиксированных на осях вертикальных лопастей. Кольца управления не вращаются, но могут независимо друг от друга перемещаться на плоскости, поперечной оси вращения, в любом направлении относительно центра вращающегося ротора за счет дополнительно введенных сервоприводов поперечного и продольного смещения. Достигается расширение арсенала технических средств для увеличения динамических возможностей подводных аппаратов. 5 ил.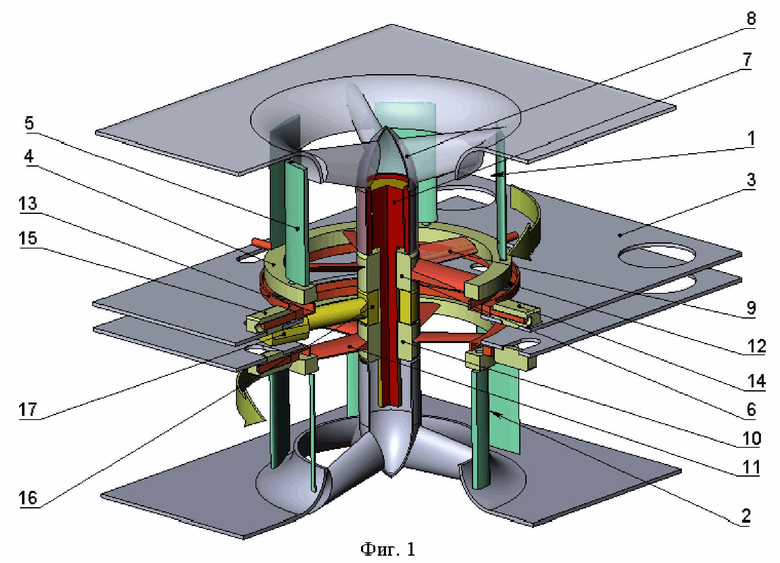
Комбинированный крыльчатый движитель подводных аппаратов с вертикальной осью и поперечным расположением относительно потока, содержащий ротор, который приводится в движение приводным двигателем, на роторе закреплены множество лопастей аэродинамического профиля, вращающихся совместно с ним вокруг вертикальной оси с постоянной управляемой по оптимальному закону ориентацией, отличающийся тем, что является спаренным и состоит из двух одинаковых крыльчатых движителей – верхнего и нижнего, собранных соосно на едином шасси симметрично относительно плоскости, перпендикулярной их оси вращения, в центре крыльчатых движителей дополнительно размещены гребные винты изменяемого шага, роторы каждого движителя приводятся во вращение посредством приводного двигателя через дифференциальный редуктор, на выходных валах которого посажены ступицы ротора, а ступицы в свою очередь механически связаны с ободами роторов посредством радиальных спиц, являющихся осями поворота лопастей гребного винта, кроме того, дополнительно введены кольца управления, представляющие собой кольцо с желобом в виде концентрических цилиндрических поверхностей, по ведущим пояскам которых свободно катятся элементы управления – ролики рычагов, зафиксированных на осях вертикальных лопастей, при этом кольца управления не вращаются, но могут независимо друг от друга перемещаться на плоскости, поперечной оси вращения, в любом направлении относительно центра вращающегося ротора за счет дополнительно введенных сервоприводов поперечного и продольного смещения, при этом дифференциальный редуктор обеспечивает разнонаправленное вращение верхнего и нижнего крыльчатых движителей.
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО ИЗМЕНЯЕМОЙ ДЛИНЫ | 2005 |
|
RU2291062C2 |
| УСТРОЙСТВО ДЛЯ АКТИВНОГО УПРАВЛЕНИЯ СУДНОМ | 1996 |
|
RU2142894C1 |
| CN 102644564 A, 22.08.2012 | |||
| Моторный опрокидный плуг | 1930 |
|
SU33053A1 |
| МОРСКОЙ ДВИЖИТЕЛЬ С ВЕРТИКАЛЬНОЙ ОСЬЮ И ПОПЕРЕЧНЫМ РАСПОЛОЖЕНИЕМ ОТНОСИТЕЛЬНО НАПРАВЛЕНИЯ ПОТОКА, С ПОСТОЯННОЙ УПРАВЛЯЕМОЙ ОРИЕНТАЦИЕЙ ЛОПАСТЕЙ | 1997 |
|
RU2179521C2 |
