Изобретение относится к оптико-электронной измерительной технике, а именно к устройствам для измерения координат быстродвижущихся объектов, и может быть использовано преимущественно для измерения координат законцовок лопастей несущих винтов вертолетов в условиях полета.
Известно устройство для измерения координат быстродвижущихся объектов в условиях широкого изменения температур и значительных оптических помех (см., например, информационный листок 90-10, УДК 531.74, РГАСНТИ 50.11.33, Алтайский межотраслевой территориальный центр научно-технической информации и пропаганды, 1990 г.).
Известное устройство содержит источник оптического излучения, модулятор светового потока, оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство, последовательно соединенное с блоком развертки напряжений и усилителем, а также узел обработки видеосигнала, включающий блоки автоматической регулировки усиления, цифровой обработки информации, селекции и выделения координаты, индикации и вывода информации, последовательно соединенные между собой.
В известном устройстве источники оптического излучения закреплены на законцовках лопастей несущего винта и выполнены с возможностью модулирования светового потока, например, мигающими. Установка источников оптического излучения на законцовках лопастей несущего винта предполагает внесение конструктивных изменений и нарушает балансировку последнего, что недопустимо. Другим недостатком известного устройства является его недостаточное быстродействие и помехоустойчивость, обусловленные использованием в качестве фотоприемного устройства линейки ПЗС, имеющей маленький динамический диапазон. Следует отметить также, что случайный характер оптических помех в реальных условиях не позволяет при использовании известного устройства с достаточной точностью выделить полезную составляющую сигнала, особенно при облачности, а следовательно, не позволяет достоверно определить координаты законцовок лопастей, что делает невозможным использование устройства в условиях полета.
Известно также устройство для измерения координат быстродвижущихся объектов, наиболее близкое по технической сущности к заявляемому (прототип) (см. В.И. Замятин, Оптико-электронные приборы на основе твердотельных фотоприемников, Барнаул, 1991, с.10).
Известное устройство содержит источник оптического излучения, модулятор светового потока и оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство, последовательно соединенное с блоком развертки напряжений и усилителем, а также узел обработки видеосигнала, включающий блоки автоматической регулировки усиления, цифровой обработки информации, селекции и выделения координаты, индикации и вывода информации, последовательно соединенные между собой.
В известном устройстве источники оптического излучения закреплены на законцовках лопастей несущего винта. В качестве модулятора светового потока использованы упомянутые источники оптического излучения, для чего они выполнены, например, мигающими. Установка источников оптического излучения на законцовках лопастей несущего винта вносит изменения в конструкцию и может нарушить балансировку последнего, что может привести к отрыву лопастей и, как следствие, к гибели вертолета и экипажа. Известное устройство обладает большим быстродействием и большей помехоустойчивостью, чем охарактеризованное выше, особенно при постоянстве пространственных и энергетических характеристик, по крайней мере, в течение двух кадров изображения, т.к. в нем в качестве фотоприемного устройства использована фотодиодная линейка. Однако в реальных условиях излучение облаков, топографические детали рельефа земной поверхности, неоднородное излучение атмосферы, отраженное или рассеянное излучение разнообразных источников создают суммарное поле излучения, описываемое только случайной функцией энергетической светимости. Поэтому при определении координат законцовок лопастей вращающегося несущего винта с помощью известного устройства на постоянно меняющемся излучающем фоне, например, при переменной облачности, возникают многочисленные ложные срабатывания, вызванные формированием временных стробов на участках перепада энергетической яркости небесного фона. Следовательно, использовать известное устройство для точного определения координат законцовок лопастей в условиях полета не представляется возможным.
Задачей изобретения является создание такого устройства для измерения координат быстродвижущихся объектов, которое осуществляло бы постоянное выделение из общего оптического сигнала его фоновой (шумовой) составляющей, что обеспечило бы высокую точность измерения координат в любых изменяющихся условиях, в том числе в условиях полета.
Указанная задача решается тем, что в известном устройстве для измерения координат быстродвижущихся объектов, содержащем источник оптического излучения, модулятор светового потока и оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство, последовательно соединенное с блоком развертки напряжений и усилителем, а также узел обработки видеосигнала, включающий блоки автоматической регулировки усиления, цифровой обработки информации, селекции и выделения координаты, индикации и вывода информации, последовательно соединенные между собой, согласно изобретению в качестве источника оптического излучения использовано естественное освещение, в качестве модулятора светового потока использованы вращающиеся лопасти несущего винта, устройство дополнительно снабжено вычитателем, а блок цифровой обработки информации выполнен в виде последовательно соединенных между собой аналого-цифрового преобразователя, запоминающего устройства и цифроаналогового преобразователя, при этом один из выходов блока индикации и вывода информации соединен со вторым входом запоминающего устройства, выход цифроаналогового преобразователя соединен с одним из входов вычитателя, со вторым входом которого соединен выход блока автоматической регулировки усиления, а выход упомянутого вычитателя соединен со входом блока селекции и обработки видеосигнала. При этом целесообразно, чтобы устройство было снабжено датчиком первой лопасти.
В дальнейшем изобретение поясняется чертежом, на котором показана блок-схема предлагаемого устройства, и описанием конкретного примера его выполнения.
Устройство для измерения координат быстродвижущихся объектов содержит оптическую головку 1, установленную на фюзеляже вертолета (не показано) так, что ее оптическая ось направлена на законцовки лопастей несущего винта вертолета (не показано), при этом в качестве модулятора светового потока использован упомянутый несущий винт (не показано). Устройство содержит также узел обработки видеосигнала 2, размещенный, например, в кабине оператора.
Оптическая головка 1 состоит из объектива 3, оптически связанной с ним фотодиодной линейки 4, усилителя 5. Узел обработки видеосигнала 2 состоит из известных стандартных блоков, последовательно соединенных между собой, а именно: блока автоматической регулировки усиления 6, блока цифровой обработки информации 7, блока селекции и выделения координаты 8, индикации и вывода информации 9. Блок автоматической регулировки усиления 6 включает последовательно соединенные коммутатор 10 и устройство для автоматической регулировки усиления 11, выходы усилителя 5 соединены со входами упомянутого коммутатора 10. Блок цифровой обработки информации 7 включает последовательно соединенные между собой аналого-цифровой преобразователь 12, запоминающее устройство 13 и цифроаналоговый преобразователь 14, при этом выход устройства для автоматической регулировки усиления 11 соединен со входом аналого-цифрового преобразователя 12. Устройство дополнительно снабжено вычитателем 15, с одним из входов которого соединен выход цифроаналогового преобразователя 14, а второй вход упомянутого вычитателя 15 подключен к выходу блока автоматической регулировки усиления 6. Блок селекции и выделения координаты 8 содержит последовательно соединенные между собой полосовой фильтр 16 и самоадаптирующийся компаратор 17, при этом выход упомянутого вычитателя 15 соединен со входом полосового фильтра 16, а выход самоадаптирующегося компаратора 17 соединен со входом блока индикации и вывода информации 9, имеющего выход на "Видео" и выход "Синхро". Кроме того, третий выход блока индикации и вывода информации 9 соединен со вторым входом запоминающего устройства 13. К блоку индикации и выхода информации 9 подключен также датчик первой лопасти 18. В качестве источника оптического излучения использовано естественное освещение.
Устройство работает следующим образом.
Источником оптического излучения является солнечное освещение, оптический сигнал в данном случае содержит полезную (информативную) составляющую и оптические помехи (фон). Для предварительного выделения достаточно характерных признаков информативной составляющей из общего оптического сигнала необходима модуляция. В качестве модулятора (не показано) используют лопасти вращающегося несущего винта вертолета. Модулированный оптический сигнал, содержащий полезную и фоновую составляющие, через объектив 3 попадает на фотодиодную линейку 4. Далее аналоговый видеосигнал с выхода фотоячеек фотодиодной линейки 4 поступает на вход усилителя 5 и далее через коммутатор 10 подается на вход устройства для автоматической регулировки усиления 11, с выхода которого аналоговый сигнал поступает на аналого-цифровой преобразователь 12 и на один из входов вычитателя 15. Устройство для автоматической регулировки 11 адаптирует аналого-цифровой преобразователь 12 к большим изменениям видеосигнала, т.к. динамический диапазон входного сигнала упомянутого аналого-цифрового преобразователя 12 довольно мал. Аналого-цифровой преобразователь 12 квантует амплитуды напряжений фотоячеек на 64 уровня градации яркости и передает цифровой сигнал на вход запоминающего устройства 13, с выхода которого цифровой сигнал поступает на вход цифроаналогового преобразователя 14, где преобразуется обратно в аналоговую форму и подается на второй вход вычитателя 15 аналогового типа. При этом на второй вход запоминающего устройства поступает сигнал из блока индикации и вывода информации 9 на перезапись и запоминание только текущего фонового сигнала, при этом сигнал на запись синхронизирован с азимутальным положением лопастей. Для перезаписи в запоминающем устройстве 13 фонового кадра используют свободное пространство между лопастями, в то время как лопасть ушла из поля зрения объектива 3 и отсутствовала в нем в течение хотя бы одного или нескольких кадров. Вычитатель 15 производит вычитание хранящегося в запоминающем устройстве 13 предыдущего фонового сигнала из общего информационного сигнала, что позволяет полностью нейтрализовать оптические помехи в каждый момент измерения, исключив тем самым ложные срабатывания устройства, и дает возможность использовать его для точного определения координат законцовок лопастей несущего винта вертолета в условиях полета. Разностный видеосигнал, являющийся только полезной частью общего информационного сигнала, поступает на полосовой фильтр 16, где производятся одновременно дифференцирование и интегрирование видеосигнала для получения из видеосигнала, содержащего составляющую функции "свет/тень" огибающей соответствующей куполообразной функции, экстремум которой соответствует координате законцовки лопасти. Самоадаптирующийся компаратор 17 производит стробирование видеосигнала. Напряжение компарации изменяется в зависимости от изменения амплитуды видеосигнала так, чтобы оставался неизменным коэффициент компарации. Временные стробы координат законцовок лопастей, выработанные упомянутым самоадаптирующимся компаратором 17, поступают на вход блока индикации и вывода информации 9, где производится выбор максимальной координаты для каждой лопасти. Указанный блок индикации и вывода информации 9 производит вывод развертки напряжений, соответствующих координатам законцовок лопастей через выход "Видео". На выход "Синхро" выдается строб для синхронизации развертки изображения.
Таким образом, использование в качестве источника оптического излучения солнечного освещения, а в качестве модулятора - непосредственно винта вертолета позволяет отказаться от установки специальных источников излучения на законцовках лопастей винта, исключая тем самым нарушение балансировки и конструктивных изменений последнего.
Обратная связь блока индикации и вывода информации с запоминающим устройством блока цифровой обработки информации позволяет осуществлять постоянную перезапись меняющегося фонового сигнала. Наличие вычитателя и его связь с блоками автоматической регулировки усиления и запоминающим устройством на входах позволяет вычитать из общего видеосигнала его фоновую составляющую в каждый момент измерения и передавать только полезную (информативную), очищенную от помех составляющую видеосигнала на вход блока индикации и цифровой обработки информации, что значительно повышает помехоустойчивость устройства, исключает его ложные срабатывания, и, следовательно, позволяет использовать предлагаемое устройство для измерения координат законцовок лопастей вертолета как в наземных условиях, так и в условиях полета.
Наличие датчика первой лопасти позволяет точно идентифицировать каждую лопасть несущего винта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ НЕСОКОНУСНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2415053C1 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2010 |
|
RU2441807C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2021 |
|
RU2762522C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ СРЫВА ПОТОКА НА ЛОПАСТЯХ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА | 2014 |
|
RU2555258C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2020 |
|
RU2735067C1 |
| Интегрированная система регистрации данных, диагностики технического и физического состояния комплекса "человек-машина" | 2019 |
|
RU2711109C1 |
| СПОСОБ КОНТРОЛЯ ЦЕЛОСТНОСТИ ЛОПАСТЕЙ НЕСУЩЕГО ВИНТА ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2593652C1 |
| Устройство для определения углового положения вертолета относительно радиомаяка | 1975 |
|
SU686641A3 |
| АВТОМАТИЗИРОВАННОЕ ИРИДОЛОГИЧЕСКОЕ УСТРОЙСТВО | 1992 |
|
RU2065721C1 |
| Устройство для индикации срыва потока на лопастях несущего винта вертолета | 2016 |
|
RU2629615C1 |
Устройство предназначено для использования в оптико-электронной измерительной технике. Устройство содержит источник оптического излучения, модулятор светового потока и оптическую головку, включающую объектив, оптически связанное с ним фотоприемное устройство, последовательно соединенное с усилителем, а также узел обработки видеосигнала, включающий блоки автоматической регулировки усиления, цифровой обработки информации, селекции и выделения координаты, индикации и вывода информации, последовательно соединенные между собой. Для значительного повышения помехоустойчивости устройства, исключения ложных срабатываний устройство дополнительно снабжено вычитателем, а блок цифровой обработки информации выполнен в виде последовательно соединенных между собой аналого-цифрового преобразователя, запоминающего устройства и цифроаналогового преобразователя, один из выходов блока индикации и вывода информации соединен с вторым входом запоминающего устройства, выход цифроаналогового преобразователя соединен с одним из входов вычитателя, с вторым входом которого соединен выход блока автоматической регулировки усиления, а выход упомянутого вычитателя соединен с входом блока селекции и обработки видеосигнала, при этом в качестве источника оптического излучения использовано естественное освещение, а в качестве модулятора светового потока использован несущий винт вертолета. 1 з.п. ф-лы, 1 ил.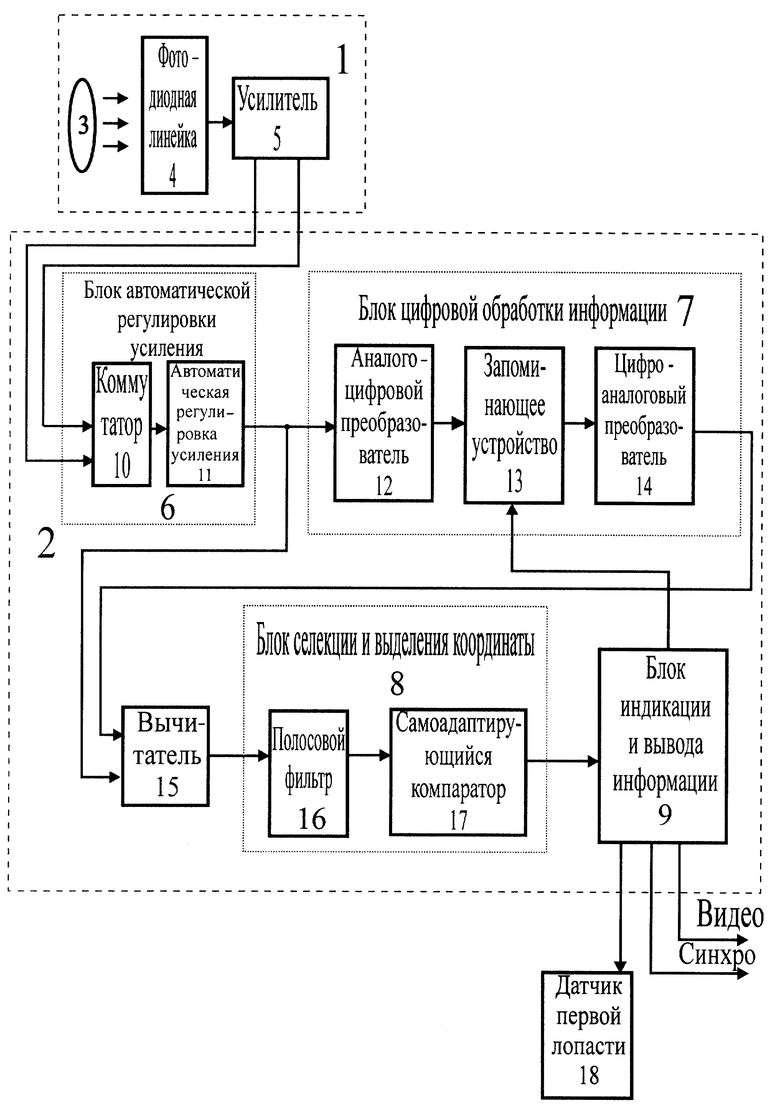
| Замятин В.И | |||
| Оптико-электронные приборы на основе твердотельных фотоприемников | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |
| Фотоэлектрический частотный датчик скорости вращения ротора коллекторной электрической машины | 1972 |
|
SU570840A1 |
| Волоконно-оптический датчик положения лопаток турбомашины | 1990 |
|
SU1763987A1 |
| US 4337497, 29.06.1982. | |||

